OpenCV级联分类器识别车辆实践笔记
1. OpenCV 级联分类器的基本原理
基于Haar特征的级联分类器的目标检测是Paul Viola和Michael Jones在2001年的论文中提出的一种有效的目标检测方法。这是一种基于机器学习的方法,从大量的正面和负面图像中训练级联函数。然后用它来检测其他图像中的物体。
Haar特征是一种反映图像的灰度变化的,像素分模块求差值的一种特征。它分为三类:边缘特征、线性特征、中心特征和对角线特征。就像卷积核一样。每个特征都是一个单独的值,由黑色矩形下的像素和减去白色矩形下的像素和得到。用黑白两种矩形框组合成特征模板,在特征模板内用 黑色矩形像素和减去白色矩形像素和来表示这个模版的特征值。
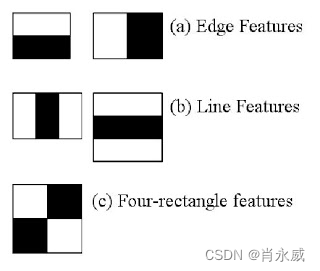
例如:脸部的一些特征能由矩形模块差值特征简单的描述,如:眼睛要比脸颊颜色要深,鼻梁两侧比鼻梁颜色要深,嘴巴比周围颜色要深等。但矩形特征只对一些简单的图形结构,如边缘、线段较敏感,所以只能描述在特定方向(水平、垂直、对角)上有明显像素模块梯度变化的图像结构。这样就可以进行区分人脸。
级联分类器(Cascade Classifier)是一种用于目标检测的机器学习模型,通常用于识别静态图像或视频流中的特定对象或物体。级联分类器的一个重要应用是人脸检测。
级联分类器基于强分类器的级联结构,其中每个强分类器都是由多个弱分类器组成的。弱分类器是一种简单而不太准确的分类器,但通过级联结构及其组合,可以达到高效且精确的目标检测效果。
2. 级联分类器CascadeClassifier检测的基本原理:
Haar特征分类器就是一个XML文件,用于存储检测特征,xml中存放的是训练后的特征池,特征size大小根据训练时的参数而定,检测的时候可以简单理解为就是将每个固定size特征(检测窗口)与输入图像的同样大小区域比较,如果匹配那么就记录这个矩形区域的位置,然后滑动窗口,检测图像的另一个区域,重复操作。由于输入的图像中特征大小不定,比如在输入图像中眼睛是50x50的区域,而训练时的是25x25,那么只有当输入图像缩小到一半的时候,才能匹配上,所以这里还有一个逐步缩小图像,也就是制作图像金字塔的流程。
利用Opencv自带的Haar特征分类器进行人脸检测,该文件中会描述人体各个部位的Haar特征值。包括人脸、眼睛、嘴唇等等。Haar特征分类器存放目录:OpenCV安装目录中的\data\ haarcascades目录下。
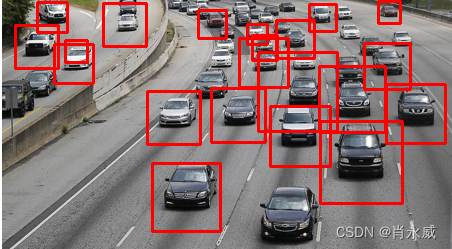
3. 静态图中车辆识别
from PIL import Image
import cv2
import numpy as npimage = Image.open('V1.png')
w,h = image.size
#image = image.resize((int(w/2),int(h/2)))
image_arr = np.array(image)
image

grey = cv2.cvtColor(image_arr,cv2.COLOR_BGR2GRAY)
dilated = cv2.dilate(blur,np.ones((3,3)))kernel = cv2.getStructuringElement(cv2.MORPH_ELLIPSE, (2, 2))
closing = cv2.morphologyEx(dilated, cv2.MORPH_CLOSE, kernel)
Image.fromarray(closing)

car_cascade_src = 'haarcascade_car.xml'
car_cascade = cv2.CascadeClassifier(car_cascade_src)
cars = car_cascade.detectMultiScale(closing, 1.1, 1)
cnt = 0
for (x,y,w,h) in cars:cv2.rectangle(image_arr,(x,y),(x+w,y+h),(255,0,0),2)cnt += 1
print(cnt, " cars found")
Image.fromarray(image_arr)
21 cars found
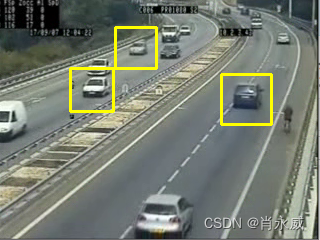
4. 动态视频中车辆识别
import cv2
import numpy as npcar_classifier= cv2.CascadeClassifier('haarcascade_car.xml')
cap= cv2.VideoCapture('cars.avi')while True: ret, frame= cap.read()if ret:#frame= cv2.resize(frame, None, fx= 0.5, fy= 0.5, interpolation= cv2.INTER_LINEAR)gray= cv2.cvtColor(frame, cv2.COLOR_BGR2GRAY)cars= car_classifier.detectMultiScale(gray,1.2,3)for (x,y,w,h) in cars:cv2.rectangle(frame,(x,y),(x+w,y+h), (0,255,255),2)cv2.imshow('Cars', frame)else:print('warning: video is not load correctly or the video is finished')breakkey = cv2.waitKey(1) #每一帧图像就显示一毫秒就可以,然后继续循环if key == 27: #27是esc的ascall码break cap.release()
cv2.destroyAllWindows()
5. 关键OpenCV函数说明
cv2.CascadeClassifier.detectMultiScale() 函数介绍
在 OpenCV 中,人脸检测使用的是 cv2.CascadeClassifier.detectMultiScale()函数,它可以检
测出图片中所有的人脸。该函数由分类器对象调用,其语法格式为:
objects = cv2.CascadeClassifier.detectMultiScale( image[,
scaleFactor[, minNeighbors[, flags[, minSize[, maxSize]]]]] )
式中各个参数及返回值的含义为:
- image:待检测图像,通常为灰度图像。
- scaleFactor:表示在前后两次相继的扫描中,搜索窗口的缩放比例。
- minNeighbors:表示构成检测目标的相邻矩形的最小个数。默认情况下,该值为 3,意味着有 3 个以上的检测标记存在时,才认为人脸存在。如果希望提高检测的准确率,可以将该值设置得更大,但同时可能会让一些人脸无法被检测到。
- flags:该参数通常被省略。在使用低版本 OpenCV(OpenCV 1.X 版本)时,它可能会被设置为 CV_HAAR_DO_CANNY_PRUNING,表示使用 Canny 边缘检测器来拒绝一些区域。
- minSize:目标的最小尺寸,小于这个尺寸的目标将被忽略。
- maxSize:目标的最大尺寸,大于这个尺寸的目标将被忽略。
- objects:返回值,目标对象的矩形框向量组。
代码中所涉及到的模型和视频等资源,详见OpenCV级联分类器识别车辆实践笔记中所涉及到的资源。
参考:
小海聊智造. opencv 进阶10-人脸识别原理说明及示例-cv2.CascadeClassifier.detectMultiScale(). CSDN博客. 2023.08
Stray_Lambs. 浅析cv2.CascadeClassifier()函数. CSDN博客. 2019.09
HAMED ETEZADI ·Haar cascade classifier-Car Detection. Kaggle. 2022.04
How to Detect Cars in a Video in Python using OpenCV. Learning about Electronics
相关文章:
OpenCV级联分类器识别车辆实践笔记
1. OpenCV 级联分类器的基本原理 基于Haar特征的级联分类器的目标检测是Paul Viola和Michael Jones在2001年的论文中提出的一种有效的目标检测方法。这是一种基于机器学习的方法,从大量的正面和负面图像中训练级联函数。然后用它来检测其他图像中的物体。 Haar特征…...

VS编译的时候不生成Release文件夹
方法描述: Build>Configuration Manager>Release 编译》配置管理》选择发布版本 再编译就有了 具体操作过程 第一步: 第二步: 第三步: 特此记录 anlog 2023年10月12日...
14.2 Socket 反向远程命令行
在本节,我们将继续深入探讨套接字通信技术,并介绍一种常见的用法,实现反向远程命令执行功能。对于安全从业者而言,经常需要在远程主机上执行命令并获取执行结果。本节将介绍如何利用 _popen() 函数来启动命令行进程,并…...
PCL点云处理之点云重建为Mesh模型并保存到PLY文件 ---方法二 (二百一十一)
PCL点云处理之点云重建为Mesh模型并保存到PLY文件 ---方法二 (二百一十一) 一、算法介绍二、算法实现1.代码2.效果一、算法介绍 离散点云重建为mesh网格模型,并保存到PLY文件中,用于其他软件打开查看,代码非常简短,复制粘贴即可迅速上手使用,具体参数根据自己的点云数据…...
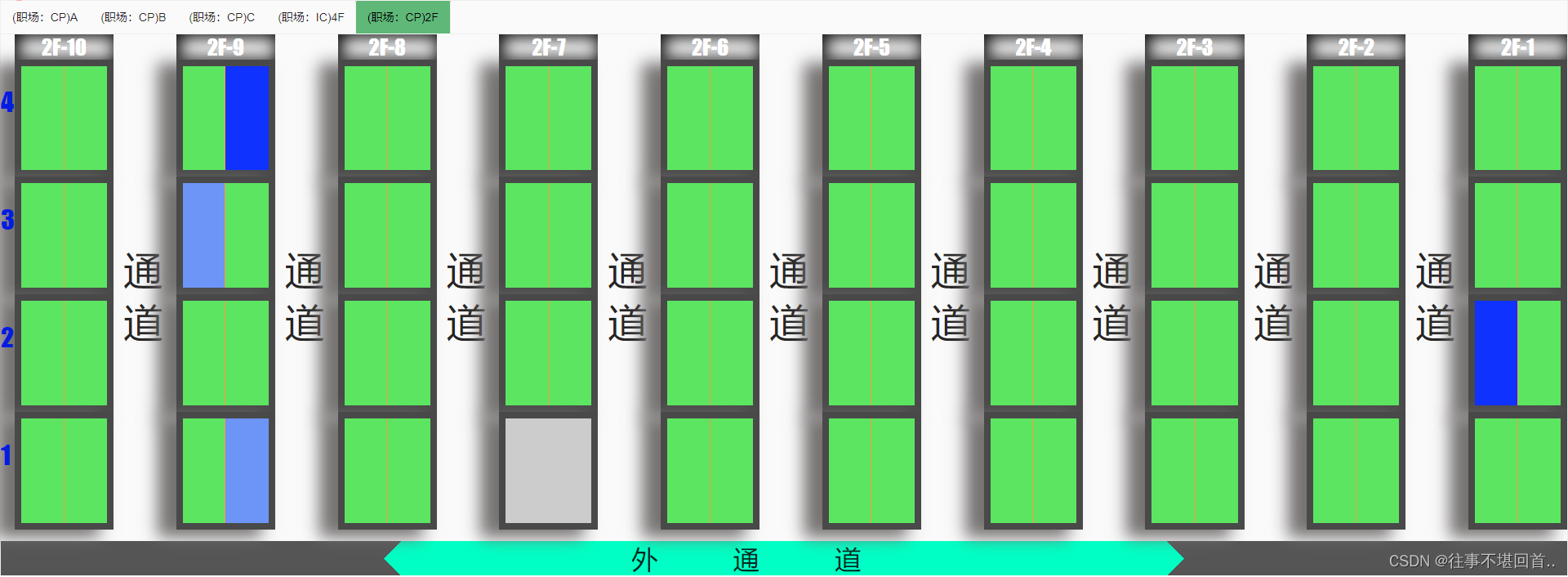
CSS 中::after的妙用(实现在margin中显示内容)
效果图如下: 背景: 如上图,之前只是当纯的写一个参考货架平面图,用作物料系统的在库状态可视化,当完成页面body分成10等份时,货架之间需要有通道,为了实现实际的样式,我给每个等份都…...
SentenceTransformer使用多GPU加速向量化
文章目录 前言代码 前言 当我们需要对大规模的数据向量化以存到向量数据库中时,且服务器上有多个GPU可以支配,我们希望同时利用所有的GPU来并行这一过程,加速向量化。 代码 就几行代码,不废话了 from sentence_transformers i…...

架构师-软件工程习题选择题
架构师-软件工程习题选择题 真题案例题 真题 c 瀑布模型:针对软件需求明确的情况,将前一个阶段做完,才能开始下一个阶段 原型模型:针对需求不明确的情况,快速搭建出系统原型,然后根据系统原型和客户确认需求…...

springboot单独在指定地方输出sql
一般线上项目都是将日志进行关闭,因为mybatis日志打印,时间长了,会占用大量的内存,如果我想在我指定的地方进行打印sql情况,怎么玩呢! 下面这个场景: 某天线上的项目出bug了,日志打印…...
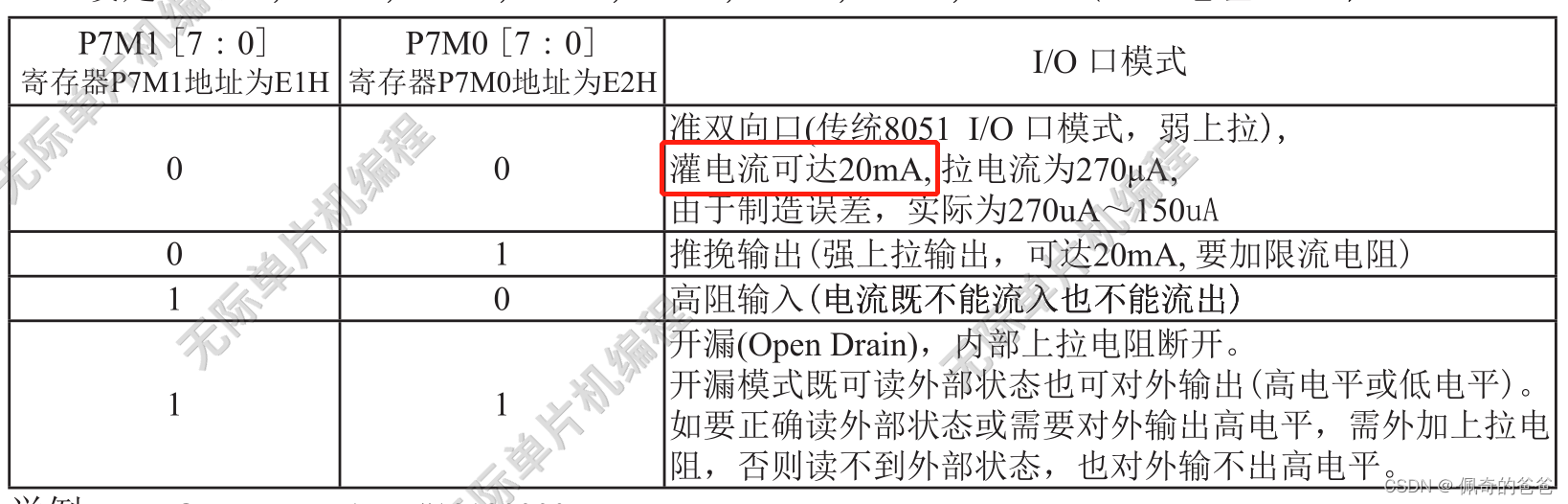
gpio内部结构(一)
一,GPIO内部结构 1,保护二极管 * 引脚内部加上这两个保护二级管可以防止引脚外部过高或过低的电压输入。 * 当引脚电压高于 VDD_FT 或 VDD 时,上方的二极管导通吸收这个高电压。 * 当引脚电压低于 VSS 时,下方的二极管导通&…...

【C++14保姆级教程】变量模板,Labmda泛型
文章目录 前言一、变量模板(Variable Templates)1.1 变量模板是什么1.2 泛型大概使用1.3 示例代码11.4 示例代码21.5 示例代码3 二、Lambda泛型(Lambda Generics)2.1 Lambda表达式泛型是什么?2.2 函数原型怎么写&#…...
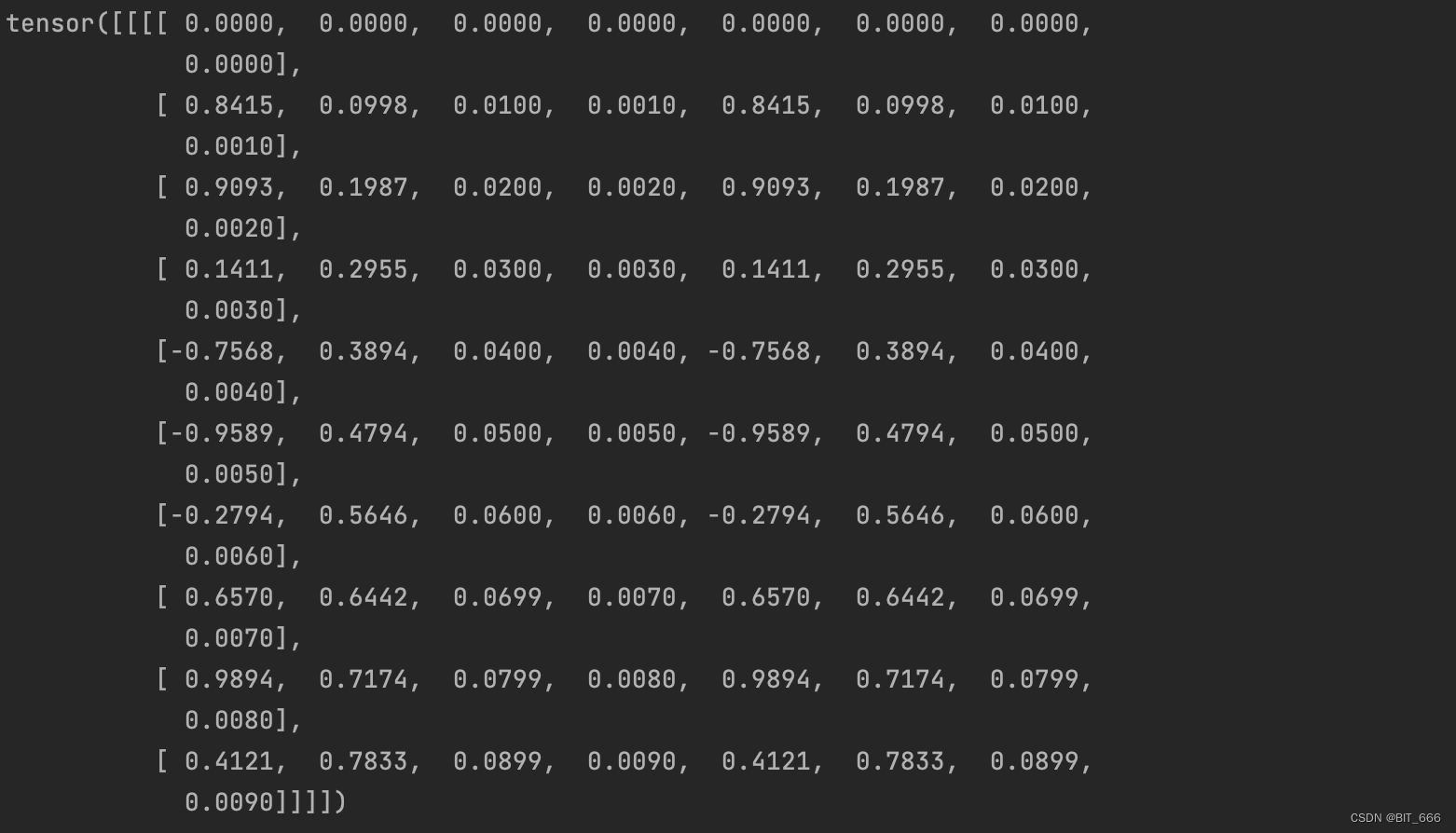
LLM - 旋转位置编码 RoPE 代码详解
目录 一.引言 二.RoPE 理论 1.RoPE 矩阵形式 2.RoPE 图例形式 3.RoPE 实践分析 三.RoPE 代码分析 1.源码获取 2.源码分析 3.rotary_emb 3.1 __init__ 3.2 forward 4.apply_rotary_pos_emb 4.1 rotate_half 4.2 apply_rotary_pos_emb 四.RoPE 代码实现 1.Q/K/V …...
Vue之VueX知识探索(一起了解关于VueX的新世界)
目录 前言 一、VueX简介 1. 什么是VueX 2. VueX的作用及重要性 3. VueX的应用场景 二、VueX的使用准备工作 1. 下载安装VueX 2. vuex获取值以及改变值 2.1 创建所需示例 2.2 将创建好的.vue文件页面显示 2.3 创建VueX的相关文件 2.4 配置VueX四个js文件 2.5 加载到vue示…...
提升吃鸡战斗力,分享顶级作战干货!
大家好!作为一名吃鸡玩家,你是否也希望提高自己的游戏战斗力?在这里,我将为大家分享一些顶级游戏作战干货,以及方便吃鸡作图和查询装备皮肤库存的实用工具。 首先,让我们提到绝地求生作图工具推荐。通过使用…...

【rust】cargo的概念和使用方法
啥是cargo 包管理器 cargo 提供了一系列的工具,从项目的建立、构建到测试、运行直至部署,为 Rust 项目的管理提供尽可能完整的手段,与 Rust 语言及其编译器 rustc 紧密结合。 创建项目 使用cargo创建一个项目: $ cargo new wo…...

MySQL数据库——SQL优化(2)-order by 优化、group by 优化
目录 order by 优化 概述 测试 优化原则 group by 优化 测试 优化原则 order by 优化 概述 MySQL的排序,有两种方式: Using filesort : 通过表的索引或全表扫描,读取满足条件的数据行,然后在排序缓冲区sortbuffer中完成排…...
C++DAY43
#include <iostream>using namespace std;//封装 沙发 类 class Sofa { private:string living; public:Sofa(){cout << "沙发的无参构造函数" << endl;}Sofa(string l):living(l){cout << "沙发的有参构造函数" << endl;}v…...

大模型的超级“外脑”——向量数据库解决大模型的三大挑战
随着AI大模型产品及应用呈现爆发式增长,新的AI时代已经到来。向量数据库可与大语言模型配合使用,解决大模型落地过程中的痛点,已成为企业数据处理和应用大模型的必选项。在近日举行的华为全联接大会2023期间,华为云正式发布GaussDB向量数据库。GaussDB向量数据库基于GaussD…...

opencv读取摄像头并读取时间戳
下面这行代码是获取摄像头每帧的时间戳: double timestamp cap.get(cv::CAP_PROP_POS_MSEC); 改变帧率的方法是: cap.set(cv::CAP_PROP_FPS, 30); //帧率改为30 但是实际测试时发现帧率并未被改变,这个可能和VideoCapture cap(cv::CAP_V…...
WebRTC 系列(四、多人通话,H5、Android、iOS)
WebRTC 系列(三、点对点通话,H5、Android、iOS) 上一篇博客中,我们已经实现了点对点通话,即一对一通话,这一次就接着实现多人通话。多人通话的实现方式呢也有好几种方案,这里我简单介绍两种方案…...
)
uniapp 点击 富文本元素 图片 可以预览(非nvue)
我使用的是uniapp 官方推荐的组件 rich-text,一般我能用官方级用官方,更有保障一些。 一、整体逻辑 1. 定义一段html标签字符串,里面包含图片 2. 将字符串放入rich-text组件中,绑定点击事件itemclick 3. 通过点击事件获取到图片ur…...

万能引用和完美转发
1、万能引用:模板函数自动推动。#include <iostream> #include <vector> #include <utility>//使用std::move和std::forward等函数需要包含这个头文件using namespace std;template<typename T> void fun(T&& a)//这里就是一个万能…...

newTimer嵌入式定时器库:跨平台非阻塞延时与状态机设计
1. newTimer 定时器库深度解析:跨平台嵌入式精准延时与状态管理方案1.1 库定位与工程价值newTimer是一个轻量级、高度可移植的 C 定时器抽象库,专为资源受限的嵌入式微控制器设计。其核心价值不在于替代硬件定时器外设,而在于提供统一、语义清…...

基于Python的毕业生实习管理系统
项目介绍:基于Python的毕业生实习管理系统技术栈 项目编号:本课题采用 Python 语言进行开发,系统整体基于 Web 平台实现。前端页面主要使用 HTML、CSS、JavaScript 进行构建,并结合 Bootstrap 提升页面布局与交互效果;…...

[Android] 故宫陶瓷馆 v2.2.251126
[Android] 故宫陶瓷馆 v2.2.251126 链接:https://pan.xunlei.com/s/VOpHzrBozQgvaUJbdCkB20SMA1?pwdu338# 故宫陶瓷馆是故宫博物院官方出品的APP,以“时间轴”为核心骨架、全新技术手段打造的陶瓷馆,为你将展品带至手中、带至眼前。...

AVR单片机Vcc电压精确测量库MCUVoltage
1. 项目概述MCUVoltage 是一款专为嵌入式系统设计的轻量级电压监测库,其核心目标是在不增加任何外部硬件的前提下,精确测量微控制器供电电压(Vcc)。该库并非依赖外部分压电阻或专用ADC芯片,而是深度挖掘AVR系列MCU内部…...

2025届毕业生推荐的五大AI辅助写作平台横评
Ai论文网站排名(开题报告、文献综述、降aigc率、降重综合对比) TOP1. 千笔AI TOP2. aipasspaper TOP3. 清北论文 TOP4. 豆包 TOP5. kimi TOP6. deepseek 把人工智能生成内容的检测概率给降低,得从文本特征方面着手去进行系统性的优化。…...

HR整理面试录像超头疼?2026年这3款提取视频文本神器,自动转写最少省4小时手动录入时间
前阵子帮做互联网公司HR的死党搭手整理春招面试录像,37场单面加8场群面,我熬了两个大夜试遍了市面上主流的5款视频转文本工具,直接给结论: 听脑AI是同类工具中最值得用的,适配HR面试整理场景的能力直接拉满࿰…...

Driver Store Explorer终极指南:三步清理Windows冗余驱动,快速释放数十GB空间
Driver Store Explorer终极指南:三步清理Windows冗余驱动,快速释放数十GB空间 【免费下载链接】DriverStoreExplorer Driver Store Explorer 项目地址: https://gitcode.com/gh_mirrors/dr/DriverStoreExplorer 你是否发现Windows系统盘空间越来越…...

Pandas读写Parquet文件避坑指南:pyarrow和fastparquet引擎怎么选?columns参数真能省内存吗?
Pandas读写Parquet文件避坑指南:引擎选择与内存优化实战解析 当你第一次听说Parquet格式能比CSV节省80%存储空间时,可能和我一样兴奋地立刻把项目里的数据全转成了.parquet后缀。但真正在生产环境部署时,却发现pd.read_parquet()在不同机器上…...

OriginPro 2023保姆级教程:三步搞定柱状图+点线图组合,让你的科研图表颜值飙升
OriginPro 2023科研图表优化实战:从基础绘图到期刊级组合图表 科研图表是学术论文的"门面",一张精心设计的图表往往能让审稿人和读者眼前一亮。OriginPro作为科研绘图领域的标杆工具,其2023版本在图表组合和视觉优化方面带来了诸多…...