FPGA project : flash_read
实验目标:
flash的普通读指令,在指定地址开始读。可以更改地址与读的数据个数。
先发送读指令+扇区地址+页地址+字节地址。
然后读数据。再把读到的串行数据转化为8bit的数据,存入fifo。
然后读出FIFO中数据,通过uart_tx模块发送给上位机。
经验总结:
接收数据:比如接收8bit的串行数据,通过miso传递。
1,先接收高位。
reg [7:0] data ;
那么通过data保存miso传递的数据,把串行数据,转换为并行数据。
有两种常用写法:
data <= {data[6:0],miso};
或者
data <= data << 1 + miso ;
或者:写一个cnt_bit,记录保存到第几bit。
data[cnt_bit] <= miso ;
2,先接收低位
data <= {miso,data[7:1]};
data[cnt_bit] <= miso ;
小技巧:
画时序图时不一定要先画内部信号,再画输出端口信号。
按照自己的设计思路,该到那个信号就画那个信号,画完也不要改,
写代码时,按照这个思路,这个画时序图的顺序,编写代码。
相当于再次检查一遍,即容易排错,有容易编写代码。
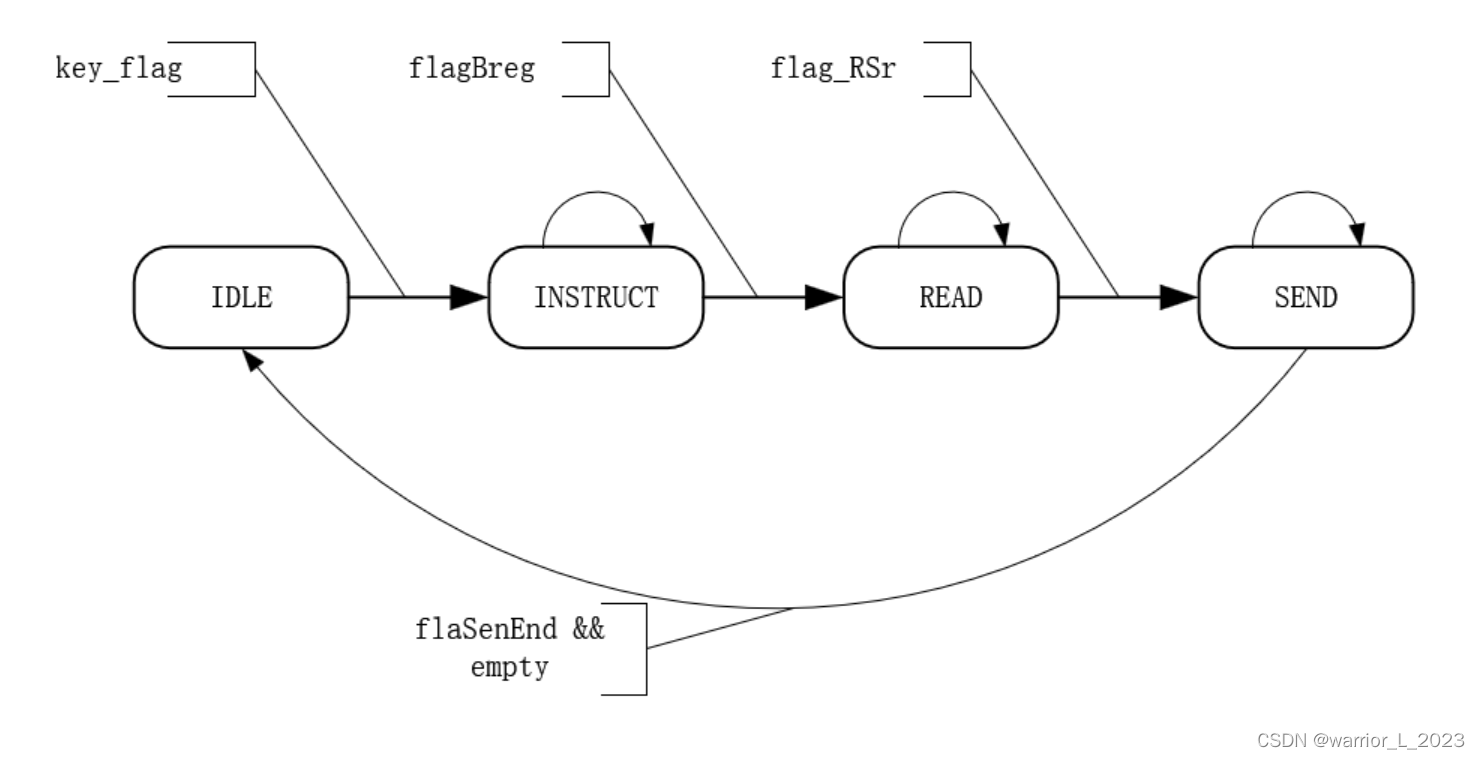
状态机:
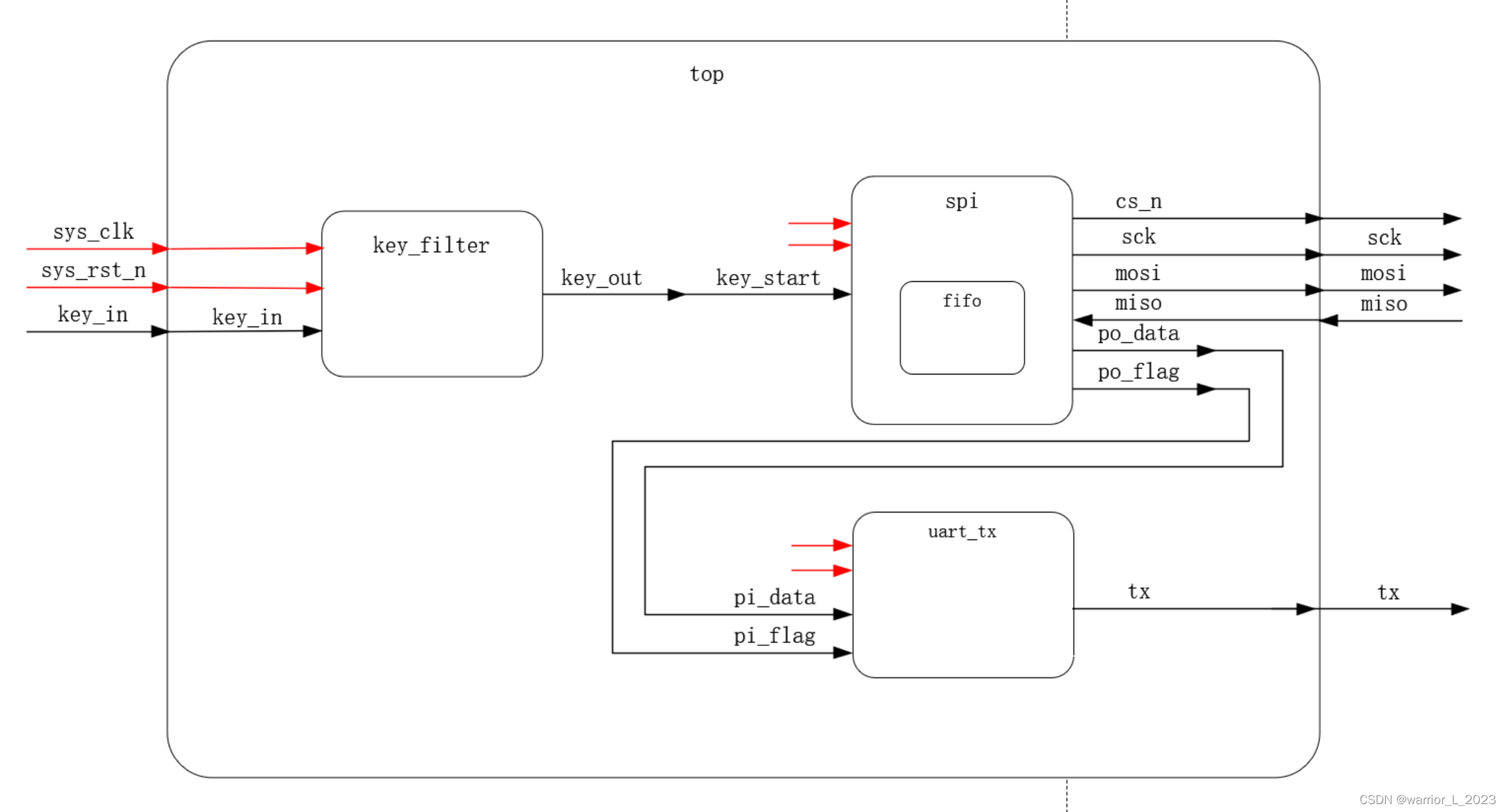
模块框图:
时序图:

代码:
module spi (input wire sys_clk ,input wire sys_rst_n ,input wire key_flag ,input wire miso ,output reg cs_n ,output reg sck ,output reg mosi ,output reg po_flag ,output wire [7:0] po_data
);// localparam define 一般状态机的状态定义用局部参数就可以。localparam IDLE = 4'b0001 ,INSTRUCT = 4'b0010 ,READ = 4'b0100 ,SEND = 4'b1000 ;// parameter define 指令,计数器最大值,用全局参数定义。parameter COMD_REA = 8'h03 , // comd_readADDR_SEC = 8'h00 , // address_secter 扇区地址ADDR_PAG = 8'h00 , // address_page 页地址(行地址)ADDR_BYT = 8'h00 , // assress_byte 字节地址NUM_COMD = 4'd4 ; // 用来记录在指令状态传递指令和地址byte数量parameter CNT_MAX_BYTE = 11'd300 , // 4 + 要读出的数据。例如: 4 + 256CNT_MAX_SEND = 20'd53000 ;// reg signal define reg [3:0] state_c ;reg [3:0] state_n ;reg cnt_20_ns ;reg [2:0] cnt_bit ;reg [10:0] cnt_byte ;reg flag_b ; // flag_bytereg flagBreg ;reg flag_R_S ; // flag_bytereg flag_RSr ;reg [7:0] datInFifo ; // data_in_fiforeg flag_data ; // flag_data 采样标志信号reg flaInFifo ; // flag_in_fiforeg [19:0] cnt_send ; // uart_tx模块发送1byte数据的等待时间。reg flaSenEnd ; // 计数器cnt_send计数到CNT_MAX_SEND - 2 拉高一个时钟周期,reg flag_out_fifo_reg ;// wire signal definewire empty ;wire full ;wire flaOutFif ; // flag_out_fifo wire [9:0] usedw ; // fifo中存储的数据量 wire IDLEtoINSTRUCT ;wire INSTRUCTto_READ ;wire READtoSEND ;wire SENDtoIDLE ;
/**********************************************************************/// // reg signal describe /*******状态机采用三段式描述*******/// reg [3:0] state_c ;// reg [3:0] state_n ;always @(posedge sys_clk or negedge sys_rst_n) beginif(~sys_rst_n) state_c <= IDLE ;else state_c <= state_n ;endalways @(*) begincase (state_c)IDLE : if(IDLEtoINSTRUCT)state_n <= INSTRUCT ;else state_n <= IDLE ;INSTRUCT : if(INSTRUCTto_READ)state_n <= READ ;else state_n <= INSTRUCT ;READ : if(READtoSEND)state_n <= SEND ;else state_n <= READ ;SEND : if(SENDtoIDLE)state_n <= IDLE ;else state_n <= SEND ;default: state_n <= IDLE ;endcaseendassign IDLEtoINSTRUCT = (state_c == IDLE ) && (key_flag) ;assign INSTRUCTto_READ = (state_c == INSTRUCT) && (flagBreg) ; // 指令的的最后1byte发送完毕assign READtoSEND = (state_c == READ ) && (flag_RSr) ; // 读完想要的最后1byteassign SENDtoIDLE = (state_c == SEND ) && (flaSenEnd && empty) ;// reg cnt_20_ns ;always @(posedge sys_clk or negedge sys_rst_n) beginif(~sys_rst_n)cnt_20_ns <= 1'b0 ;else if(state_c == INSTRUCT || state_c == READ)cnt_20_ns <= cnt_20_ns + 1'b1 ;else if(state_c != INSTRUCT || state_c != READ)cnt_20_ns <= 1'b0 ;else cnt_20_ns <= 1'b0 ;end// reg [2:0] cnt_bit ;always @(posedge sys_clk or negedge sys_rst_n) beginif(~sys_rst_n)cnt_bit <=3'd0 ;elsecase (state_c)IDLE : cnt_bit <=3'd0 ;INSTRUCT: if(!cnt_20_ns && sck && cnt_bit == 7) cnt_bit <= 3'd0 ;else if(!cnt_20_ns && sck)cnt_bit <= cnt_bit + 1'b1 ;READ : if(!cnt_20_ns && sck && cnt_bit == 7) cnt_bit <= 3'd0 ;else if(!cnt_20_ns && sck)cnt_bit <= cnt_bit + 1'b1 ;SEND : cnt_bit <=3'd0 ;default : cnt_bit <=3'd0 ; endcaseend// reg [10:0] cnt_byte ;always @(posedge sys_clk or negedge sys_rst_n) beginif(~sys_rst_n)cnt_byte <= 4'd0 ;else if(cnt_bit == 7 && cnt_byte == CNT_MAX_BYTE - 1 && !cnt_20_ns && sck)cnt_byte <= 4'd0 ;else if(cnt_bit == 7 && !cnt_20_ns && sck)cnt_byte <= cnt_byte + 1'b1 ;else cnt_byte <= cnt_byte ;end// reg flag_R_S ;// reg flag_b ;always @(posedge sys_clk or negedge sys_rst_n) beginif(~sys_rst_n) beginflag_b <= 1'b0 ;flag_R_S <= 1'b0 ;endelsecase (state_c)IDLE : beginflag_b <= 1'b0 ;flag_R_S <= 1'b0 ;end INSTRUCT: begin if((cnt_byte == NUM_COMD - 1) && (cnt_bit == 7) && !cnt_20_ns && sck)flag_b <= 1'b1 ;else flag_b <= flag_b ;flag_R_S <= 1'b0 ;endREAD : beginif(cnt_byte == NUM_COMD)flag_R_S <= 1'b0 ;else if((cnt_byte == CNT_MAX_BYTE - 1) && (cnt_bit == 7) && !cnt_20_ns && sck)flag_R_S <= 1'b1 ;flag_b <= 1'b0 ;endSEND : beginflag_b <= 1'b0 ;flag_R_S <= 1'b0 ;end default : beginflag_b <= 1'b0 ;flag_R_S <= 1'b0 ;end endcase end// reg flagBreg ;// reg flag_RSr ;always @(posedge sys_clk or negedge sys_rst_n) beginif(~sys_rst_n)flagBreg <= 1'b0 ;else flagBreg <= flag_b ;endalways @(posedge sys_clk or negedge sys_rst_n) beginif(~sys_rst_n)flag_RSr <= 1'b0 ;else flag_RSr <= flag_R_S ;end// reg [7:0] datInFifo ; // data_in_fifoalways @(posedge sys_clk or negedge sys_rst_n) beginif(~sys_rst_n) datInFifo <= 1'b0 ;else if(flag_data)datInFifo <= {miso,datInFifo[7:1]}; // 读flash中数据,先传的低位。else datInFifo <= datInFifo ;end// reg flag_data ; // flag_data 采样标志信号always @(posedge sys_clk or negedge sys_rst_n) beginif(~sys_rst_n)flag_data <= 1'b0 ;else if(state_c == READ) beginif(cnt_20_ns && !sck)flag_data <= 1'b1 ;else flag_data <= 1'b0 ;end else beginflag_data <= 1'b0 ;endend// reg flaInFifo ; // flag_in_fifoalways @(posedge sys_clk or negedge sys_rst_n) beginif(~sys_rst_n)flaInFifo <= 1'b0 ;else if(state_c == READ && cnt_bit == 7 && flag_data)flaInFifo <= 1'b1 ;else flaInFifo <= 1'b0 ;end// reg [19:0] cnt_send ; // uart_tx模块发送1byte数据的等待时间。always @(posedge sys_clk or negedge sys_rst_n) beginif(~sys_rst_n) cnt_send <= 20'd0 ;else if(state_c == SEND) beginif(cnt_send == CNT_MAX_SEND - 1) cnt_send <= 20'd0 ;else cnt_send <= cnt_send + 1'b1 ;endelse cnt_send <= 20'd0 ;end// reg flag_out_fifo_reg ;always @(posedge sys_clk or negedge sys_rst_n) beginif(~sys_rst_n)flag_out_fifo_reg <= 1'b0 ;else if(flaSenEnd && !empty)flag_out_fifo_reg <= 1'b1 ;else flag_out_fifo_reg <= 1'b0 ;end// reg flaSenEnd ;always @(posedge sys_clk or negedge sys_rst_n) beginif(~sys_rst_n) flaSenEnd <= 1'b0 ;else if(cnt_send == CNT_MAX_SEND - 2)flaSenEnd <= 1'b1 ;else flaSenEnd <= 1'b0 ;end// output signal describe// cs_n ,always @(posedge sys_clk or negedge sys_rst_n) beginif(~sys_rst_n)cs_n <= 1'b1 ;else case (state_c)IDLE : if(key_flag)cs_n <= 1'b0 ;else cs_n <= cs_n ;INSTRUCT: cs_n <= cs_n ;READ : cs_n <= cs_n ;SEND : cs_n <= 1'b1 ;default : cs_n <= 1'b1 ;endcaseend// sck ,always @(posedge sys_clk or negedge sys_rst_n) beginif(~sys_rst_n) sck <= 1'b0 ;else case (state_c)IDLE : sck <= 1'b0 ; INSTRUCT: if(cnt_20_ns)sck <= ~sck ;else sck <= sck ;READ : if(cnt_20_ns)sck <= ~sck ;else sck <= sck ;SEND : sck <= 1'b0 ; default : sck <= 1'b0 ; endcaseend// mosi ,always @(posedge sys_clk or negedge sys_rst_n) beginif(~sys_rst_n) beginmosi <= 1'b0 ;end else begincase (state_c)IDLE : mosi <= 1'b0 ;INSTRUCT: case (cnt_byte)0 : if(cnt_bit == 0)mosi <= COMD_REA[7] ;else if(cnt_20_ns && sck)mosi <= COMD_REA[7 - cnt_bit] ;else mosi <= mosi ;1 : if(cnt_bit == 0)mosi <= ADDR_SEC[7] ;else if(cnt_20_ns && sck)mosi <= ADDR_SEC[7 - cnt_bit] ;else mosi <= mosi ;2 : if(cnt_bit == 0)mosi <= ADDR_PAG[7] ;else if(cnt_20_ns && sck)mosi <= ADDR_PAG[7 - cnt_bit] ;else mosi <= mosi ;3 : if(cnt_bit == 0)mosi <= ADDR_BYT[7] ;else if(cnt_20_ns && sck)mosi <= ADDR_BYT[7 - cnt_bit] ;else mosi <= mosi ;default : mosi <= 1'b0 ;endcaseREAD : mosi <= 1'b0 ;SEND : mosi <= 1'b0 ;default : mosi <= 1'b0 ;endcaseendend// po_flag ,always @(posedge sys_clk or negedge sys_rst_n) beginif(~sys_rst_n)po_flag <= 1'b0 ;else po_flag <= flag_out_fifo_reg ;end// wire [7:0] po_data ;// 直接连接到fifo的输出端口。 // */
/***********************例化FIFO***************************************/assign flaOutFif = flag_out_fifo_reg ;
fifo_1024x8 fifo_1024x8_inst(.clock ( sys_clk ) ,.data ( datInFifo ) ,.rdreq ( flaOutFif ) ,.wrreq ( flaInFifo ) ,.empty ( empty ) ,.full ( full ) ,.q ( po_data ) ,.usedw ( usedw )
);endmodulemodule top (input wire sys_clk ,input wire sys_rst_n ,input wire key_in ,input wire miso ,output wire cs_n ,output wire sck ,output wire mosi ,output wire tx
);// 例化间连线wire key_flag ;wire po_flag ;wire [7:0] po_data ;key_filter key_filter_isnt(.sys_clk ( sys_clk ) ,.sys_rst_n ( sys_rst_n ) ,.key_in ( key_in ) ,.key_out ( key_flag )
);spi spi_inst(.sys_clk ( sys_clk ) ,.sys_rst_n ( sys_rst_n ) ,.key_flag ( key_flag ) ,.miso ( miso ) , .cs_n ( cs_n ) ,.sck ( sck ) ,.mosi ( mosi ) ,.po_flag ( po_flag ) ,.po_data ( po_data )
);uart_tx uart_tx_isnt(.sys_clk ( sys_clk ) ,.sys_rst_n ( sys_rst_n ) ,.pi_flag ( po_flag ) ,.pi_data ( po_data ) ,.tx ( tx )
);endmodule
module key_filter
#(parameter MAX_CNT_20MS = 20'd100_0000
)(input wire sys_clk ,input wire sys_rst_n ,input wire key_in ,output wire key_out
);reg key_r_0 ;reg key_r_1 ;wire nege ;wire pose ;reg [19:00] cnt_20ms ;wire add_cnt_20ms ;wire end_cnt_20ms ;reg add_cnt_flag ;// key_r_0 key_r_1 always @(posedge sys_clk or negedge sys_rst_n) beginif(~sys_rst_n) beginkey_r_0 <= 1'b1 ;end else beginkey_r_0 <= key_in ;endendalways @(posedge sys_clk or negedge sys_rst_n) beginif(~sys_rst_n) beginkey_r_1 <= 1'b1 ;end else beginkey_r_1 <= key_r_0 ;endend// nege poseassign nege = ~key_r_0 && key_r_1 ;assign pose = key_r_0 && ~key_r_1 ;// add_cnt_flagalways @(posedge sys_clk or negedge sys_rst_n) beginif(~sys_rst_n) beginadd_cnt_flag <= 1'b0 ;end else beginif(nege) beginadd_cnt_flag <= 1'b1 ;end else beginif( pose || end_cnt_20ms ) beginadd_cnt_flag <= 1'b0 ;end else beginadd_cnt_flag <= add_cnt_flag ;endend endend// cnt_20ms add_cnt_20ms end_cnt_20msalways @(posedge sys_clk or negedge sys_rst_n) beginif(~sys_rst_n) begincnt_20ms <= 20'd0 ;end else beginif(add_cnt_20ms) beginif(end_cnt_20ms) begincnt_20ms <= 20'd0 ;end else begincnt_20ms <= cnt_20ms + 20'd1 ;endend else begincnt_20ms <= 20'd0 ;endendendassign add_cnt_20ms = add_cnt_flag ;assign end_cnt_20ms = add_cnt_20ms && cnt_20ms == ( MAX_CNT_20MS - 1'b1 ) ;// key_out// always @(posedge sys_clk or negedge sys_rst_n) begin// // always @(*) begin // 这样的话 会综合成 数据选择器// if(~sys_rst_n) begin// key_out <= 1'b0 ;// end else begin// if(end_cnt_20ms) begin// key_out <= 1'b1 ;// end else begin// key_out <= 1'b0 ;// end// end// endassign key_out = end_cnt_20ms ;
endmodule
module uart_tx (input wire sys_clk ,input wire sys_rst_n ,input wire pi_flag ,input wire [7:0] pi_data ,output reg tx
);// parameterparameter SUB_1K = 1000 , // 缩减第十位,空闲位的时间。CLK_UART = 50_000_000 ,BPS = 9600 ;localparam MAX_BPS = CLK_UART / BPS ;// reg signal definereg pi_flag_reg1 ;reg [ 7:0] pi_data_reg1 ;reg work_en ;reg [12:0] cnt_bps ;reg [ 3:0] cnt_bit ;reg bit_flag ;/**********************************************/// reg pi_flag_reg1 ;always @(posedge sys_clk or negedge sys_rst_n) beginif(~sys_rst_n)pi_flag_reg1 <= 1'b0 ;else pi_flag_reg1 <= pi_flag ;end// reg pi_data_reg1 ;always @(posedge sys_clk or negedge sys_rst_n) beginif(~sys_rst_n)pi_data_reg1 <= 8'd0 ;else pi_data_reg1 <= pi_data ;end// reg work_en ;always @(posedge sys_clk or negedge sys_rst_n) beginif(~sys_rst_n) work_en <= 1'b0 ;else if(((cnt_bit == 4'd0) && pi_flag_reg1) || (cnt_bit == 4'd9) && (bit_flag))work_en <= ~work_en ;else work_en <= work_en ;end// reg [12:0] cnt_bps ;always @(posedge sys_clk or negedge sys_rst_n) beginif(~sys_rst_n)cnt_bps <= 13'd0 ;else if(work_en && cnt_bps == MAX_BPS - 1) // 波特率计数器计数到最大值。cnt_bps <= 13'd0 ;else if(work_en)cnt_bps <= cnt_bps + 1'b1 ;else cnt_bps <= 13'd0 ;end// reg bit_flag ;always @(posedge sys_clk or negedge sys_rst_n) beginif(~sys_rst_n)bit_flag <= 1'b0 ;else if((work_en && cnt_bps == MAX_BPS - 1) || (work_en && cnt_bps == MAX_BPS - SUB_1K && cnt_bit == 9))bit_flag <= 1'b1 ;else bit_flag <= 1'b0 ;end// reg [ 3:0] cnt_bit ;always @(posedge sys_clk or negedge sys_rst_n) beginif(~sys_rst_n)cnt_bit <= 4'd0 ;else if(work_en && bit_flag && cnt_bit == 4'd9) // 传递完第十位,位计数器要归零。cnt_bit <= 4'd0 ;else if(work_en && bit_flag)cnt_bit <= cnt_bit + 1'b1 ;else if(work_en)cnt_bit <= cnt_bit ;else cnt_bit <= 4'd0 ;end/****************************************/// output signal// txalways @(posedge sys_clk or negedge sys_rst_n) beginif(~sys_rst_n) tx <= 1'b1 ;else if(work_en) begincase (cnt_bit)0 : tx <= 1'b0 ;1 : tx <= pi_data_reg1[0] ; // 先发最低位。2 : tx <= pi_data_reg1[1] ;3 : tx <= pi_data_reg1[2] ;4 : tx <= pi_data_reg1[3] ;5 : tx <= pi_data_reg1[4] ;6 : tx <= pi_data_reg1[5] ;7 : tx <= pi_data_reg1[6] ;8 : tx <= pi_data_reg1[7] ;9 : tx <= 1'b1 ;default: tx <= 1'b1 ;endcase end else begintx <= 1'b1 ;endend
endmodule
`timescale 1ns/1nsmodule test_spi();reg sys_clk ;reg sys_rst_n ;reg key_flag ;wire miso ;wire cs_n ;wire sck ;wire mosi ;wire po_flag ;wire [7:0] po_data ;defparam memory.mem_access.initfile = "initmemory.txt"; defparam spi_inst.CNT_MAX_SEND = 100 ;m25p16 memory (.c ( sck ) , .data_in ( mosi ) , .s ( cs_n ) , .w ( 1'b1 ) , .hold ( 1'b1 ) , .data_out ( miso )
);
spi spi_inst(.sys_clk ( sys_clk ) ,.sys_rst_n ( sys_rst_n ) ,.key_flag ( key_flag ) ,.miso ( miso ) ,.cs_n ( cs_n ) ,.sck ( sck ) ,.mosi ( mosi ) ,.po_flag ( po_flag ) ,.po_data ( po_data )
);parameter CYCLE = 20 ;initial beginsys_clk = 1'b1 ;sys_rst_n <= 1'b0 ;key_flag <= 1'b0 ;#(CYCLE) ;sys_rst_n <= 1'b1 ;#(CYCLE*10) ;#(CYCLE * 100) ;key_flag <= 1'b1 ;#(CYCLE) ;key_flag <= 1'b0 ;endalways #(CYCLE/2) sys_clk = ~sys_clk ;endmodule仿真波形:

上版验证通过。
相关文章:
FPGA project : flash_read
实验目标: flash的普通读指令,在指定地址开始读。可以更改地址与读的数据个数。 先发送读指令扇区地址页地址字节地址。 然后读数据。再把读到的串行数据转化为8bit的数据,存入fifo。 然后读出FIFO中数据,通过uart_tx模块发送…...

nnunetv2训练报错 ValueError: mmap length is greater than file size
目录 报错解决办法 报错 笔者在使用 nnunetv2 进行 KiTS19肾脏肿瘤分割实验的训练步骤中 使用 2d 和3d_lowres 训练都没有问题 nnUNetv2_train 40 2d 0nnUNetv2_train 40 3d_lowres 0但是使用 3d_cascade_fullres 和 3d_fullres 训练 nnUNetv2_train 40 3d_cascade_fullres …...
-每天10个小知识)
React知识点系列(2)-每天10个小知识
目录 1. 如何优化 React 应用的性能?你用过哪些性能分析工具?2. 在 React 中,什么是 Context API?你在什么场景下会使用它?3. 你能解释一下什么是 React Fiber 吗?4. 在项目中,你是否使用过 Rea…...
AutoGPT:让 AI 帮你完成任务事情 | 开源日报 No.54
Significant-Gravitas/AutoGPT Stars: 150.4k License: MIT AutoGPT 是开源 AI 代理生态系统的核心工具包。它采用模块化和可扩展的框架,使您能够专注于以下方面: 构建 - 为惊人之作打下基础。测试 - 将您的代理调整到完美状态。查看 - 观察进展成果呈…...
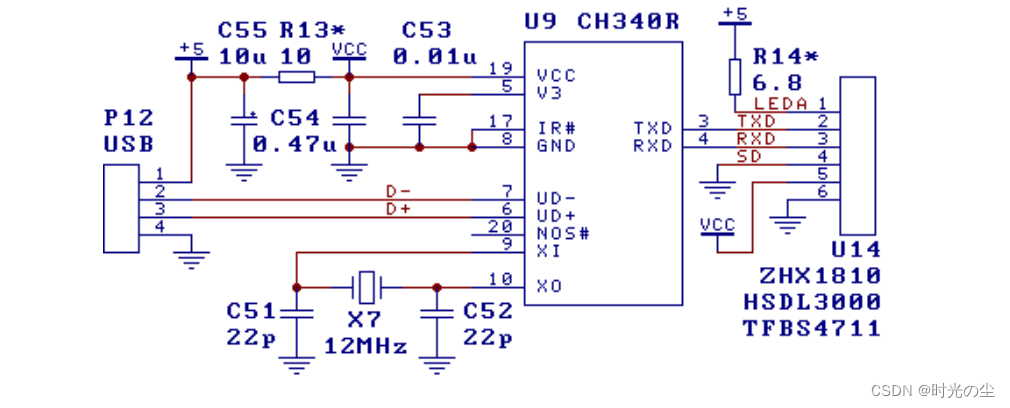
USB 转串口芯片 CH340
目录 1、概述 2、特点 3、封装 4、引脚 6、参数 6.1 绝对最大值(临界或者超过绝对最大值将可能导致芯片工作不正常甚至损坏) 6.2 电气参数(测试条件:TA25℃,VCC5V,不包括连接 USB 总线的引脚&…...
Day 05 python学习笔记
循环 应用:循环轮播图 最基础、最核心 循环:周而复始,谓之循环 (为了代码尽量不要重复) while循环 while的格式 索引定义 while 表达式(只要结果为布尔值即可): 循环体 通过条件的不断变化,从…...

Python如何17行代码画一个爱心
🌈write in front🌈 🧸大家好,我是Aileen🧸.希望你看完之后,能对你有所帮助,不足请指正!共同学习交流. 🆔本文由Aileen_0v0🧸 原创 CSDN首发🐒 如…...

生产环境中常用Linux命令
太简单的我就不讲解啦,浪费时间,直接将生产中常用的 文章目录 1.总纲2.整机 top3.CPU vmstat3. 内存 free4. 硬盘: df5. 磁盘IO iostat6. 网络IO ifstat7: 内存过高的情景排查 1.总纲 整机:topcpu:vmstat内存:free硬盘:df磁盘io: iostat网络io:ifstat 2.整机 top 首先们要查…...

【使用 TensorFlow 2】03/3 创建自定义损失函数
一、说明 TensorFlow 2发布已经接近5年时间,不仅继承了Keras快速上手和易于使用的特性,同时还扩展了原有Keras所不支持的分布式训练的特性。3大设计原则:简化概念,海纳百川,构建生态.这是本系列的第三部分,…...

Vue3中使用v-model高级用法参数绑定传值
Vue3中使用v-model高级用法参数绑定传值 单个输入框传值多个输入框传值,一个组件接受多个v-model值 单个输入框传值 App.vue <template><p>{{firstName}}</p><hello-world v-model"firstName"></hello-world> </template><…...

你的工作中,chatGPT可以帮你做什么?
如何在工作中使用 ChatGPT 的 10 种实用方法 现在您已经知道如何开始使用 ChatGPT 并了解其基本功能(提示 -> 响应),让我们探讨如何使用它来大幅提高工作效率。 1. 总结报告、会议记录等 ChatGPT可以快速分析大文本并识别关键点。例如&a…...

k8s简单部署nginx
文章目录 1. 前言2. 部署nginx2.1. **创建一个nginx的Deployment**2.2. **创建一个nginx的service** 3. 总结 1. 前言 前文提要: kubeadm简单搭建k8s集群第三方面板部署k8s 上篇文章我们简单部署了k8s的集群环境,相比一定迫不及待的想部署一个实际应用了…...

小黑子—MyBatis:第四章
MyBatis入门4.0 十 小黑子进行MyBatis参数处理10.1 单个简单类型参数10.1.1 单个参数Long类型10.1.2 单个参数Date类型 10.2 Map参数10.3 实体类参数(POJO参数)10.4 多参数10.5 Param注解(命名参数)10.6 Param注解源码分析 十一 小…...
Docker快速上手:使用Docker部署Drupal并实现公网访问
文章目录 前言1. Docker安装Drupal2. 本地局域网访问3 . Linux 安装cpolar4. 配置Drupal公网访问地址5. 公网远程访问Drupal6. 固定Drupal 公网地址 前言 Dupal是一个强大的CMS,适用于各种不同的网站项目,从小型个人博客到大型企业级门户网站。它的学习…...
-每天10个小知识)
React知识点系列(1)-每天10个小知识
目录 1.什么是 React,以及它在前端开发中的优势是什么?2.你是如何组织和管理 React 组件的?3.你能解释一下 React 的生命周期方法吗?你通常在哪个生命周期方法中发起网络请求?4.什么是 React Hooks?你常用哪…...

substring 和 substr 的区别
1、结论 两个方法都用于截取字符串,其用法不同: 1)相同点: ① 都用于截取字符串; ② 第一个参数都是表示提取字符的开始索引位置; 2)不同点: ① 第一个参数的取值范围不同&…...

产品经理的工作职责是什么?
产品经理的工作职责主要包括以下几个方面: 1. 产品策划与定义:产品经理负责制定产品的整体策略和规划,包括产品定位、目标用户、市场需求分析等。他们需要与团队合作,定义产品的功能和特性,明确产品的核心竞争力和差异…...
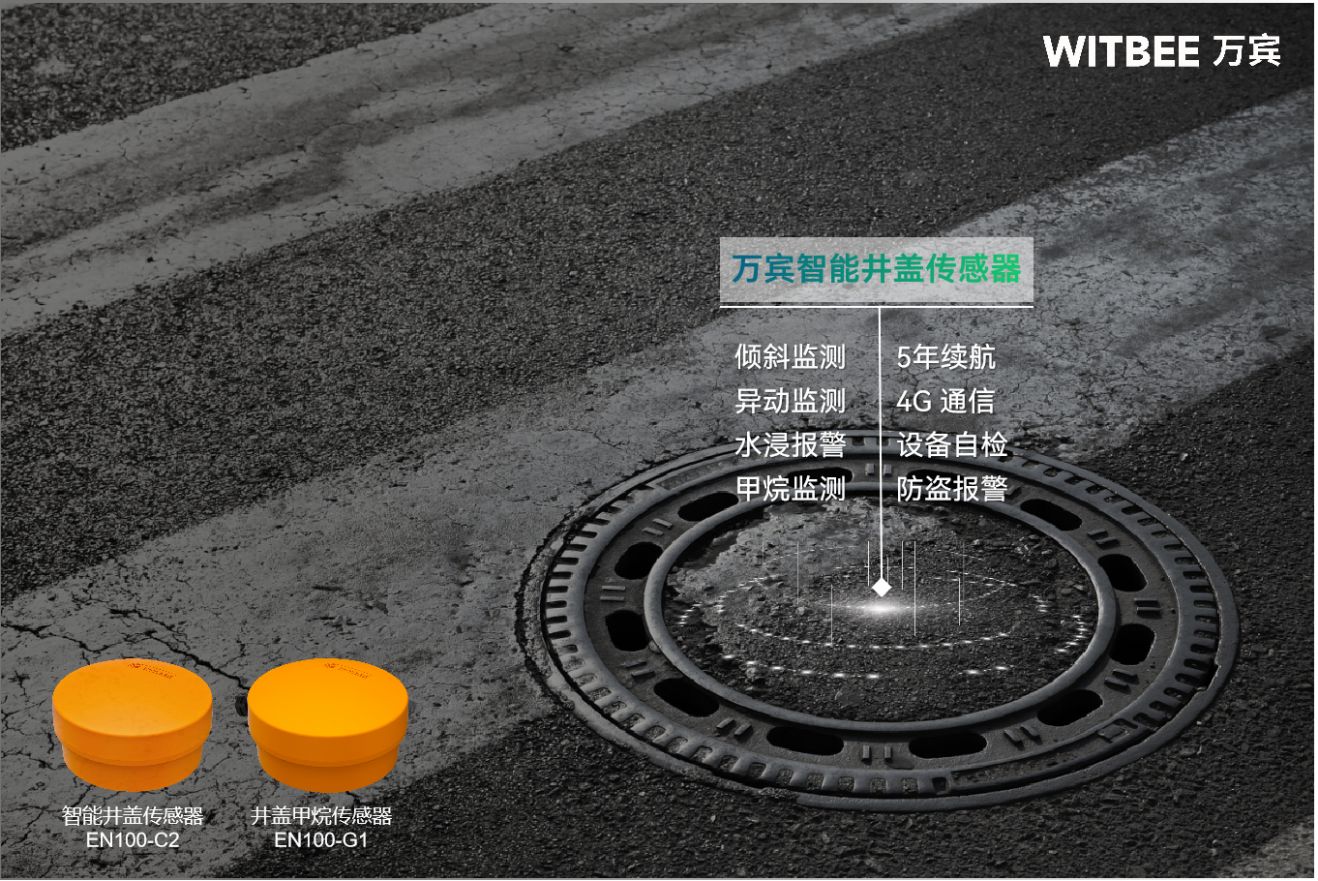
智能井盖传感器:提升城市安全与便利的利器
在智能化城市建设的浪潮中,WITBEE万宾智能井盖传感器,正以其卓越的性能和创新的科技,吸引着越来越多的关注。本文小编将为大家详细介绍这款产品的独特优势和广阔应用前景。 在我们生活的城市中,井盖可能是一个最不起眼的存在。然而…...
给你一个项目,你将如何开展性能测试工作?
一、性能三连问 1、何时进行性能测试? 性能测试的工作是基于系统功能已经完备或者已经趋于完备之上的,在功能还不够完备的情况下没有多大的意义。因为后期功能完善上会对系统的性能有影响,过早进入性能测试会出现测试结果不准确、浪费测试资…...
点燃市场热情,让产品风靡全球——实用推广策略大揭秘!
文章目录 一、实用推广策略的重要性1. 提高产品知名度和认可度2. 拓展产品市场和用户群体3. 增强企业品牌形象和市场竞争力 二、实用推广策略的种类1. 社交媒体推广2. 定向推广3. 口碑营销4. 内容推广 三、实用推广策略的实施步骤1. 研究目标用户和市场需求,明确产品…...
的显式与隐式设备管理对比)
PyTorch实战:多GPU环境下torch.cuda.set_device()的显式与隐式设备管理对比
1. 多GPU环境下的设备管理基础 当你在实验室或者公司服务器上看到多块GPU时,是不是既兴奋又有点无从下手?PyTorch为我们提供了多种方式来管理这些计算资源,但选择不当可能会带来意想不到的问题。让我们从一个实际场景开始:假设你正…...

Python金融预测实战:CNN-BiLSTM模型在沪深300指数预测中的调参与对比分析
1. 为什么选择CNN-BiLSTM预测沪深300指数? 在金融时间序列预测领域,传统统计方法(如ARIMA)往往难以捕捉市场中的非线性关系。我最初尝试用单一LSTM模型预测沪深300指数收盘价时,发现两个明显问题:一是对价格…...

探索未来Web交互:Unity与Vue的梦幻联动
探索未来Web交互:Unity与Vue的梦幻联动 【下载地址】Unity打包成WebGL与Vue交互Demo 本示例仓库演示了如何将Unity开发的游戏或应用打包成WebGL格式,并在基于Vue.js的前端应用中进行集成与交互。通过这个项目,开发者可以学习到Unity与现代Web…...

可持续交通,正在重写“产品生命周期”
作者:王聪彬一边是全球经济对物流、出行和流动效率的持续依赖,一边则是交通运输正在成为全球减碳进程中最难啃的“硬骨头”。过去几十年,交通系统不断推动全球化与城市化加速,但与此同时,它也成为温室气体排放增长最快…...

财务RPA只能自动执行吗?它还能结合大模型,进化成财务分析助手
提到财务RPA,多数人对它的认知还停留在“自动化工具”层面,能724小时不间断处理发票录入、凭证生成、银行对账等重复性财务工作,替代人工完成机械操作,实现“降本增效”。但事实上,随着大模型技术与财务场景的深度融合…...

VS Code 迎来史诗级更新:全新 Agents 窗口发布
VS Code 在前几年古法编程时代,那就是 IDE 的王者。随着 AI Coding 的不断进步。虽然 VS Code 依托 github copilot 早早的就集成了 AI Coding 的能力。但是由于 VSCode 本身是一个 IDE ,它的核心能力还是文本编辑器。但是在 Claude, xcode 等…...

搞定银河麒麟V10+飞腾平台Qt开发环境后,我总结的3个必做配置和1个字体坑
银河麒麟V10飞腾平台Qt开发环境深度调优指南 在国产化技术栈中,银河麒麟V10操作系统搭配飞腾D2000处理器的组合正逐渐成为自主可控解决方案的主流选择。对于需要在此平台上进行Qt开发的工程师而言,成功安装Qt仅仅是万里长征的第一步。本文将深入剖析三个…...

GEO优化实战指南:中小企业如何精准提升本地服务获客效率?
随着线上营销的重要性日益凸显,中小企业面临着前所未有的机遇与挑战。GEO(生成式引擎优化)作为近年来兴起的一种技术手段,旨在帮助企业更高效地利用AI平台进行品牌推广与客户获取。本文将探讨中小企业如何通过GEO优化策略…...

CSL编辑器技术深度解析:基于HTML5的学术引用样式编辑全栈指南
CSL编辑器技术深度解析:基于HTML5的学术引用样式编辑全栈指南 【免费下载链接】csl-editor cslEditorLib - A HTML 5 library for searching and editing CSL styles 项目地址: https://gitcode.com/gh_mirrors/csl/csl-editor CSL编辑器是一个基于HTML5技术…...

i.MX8MP多核异构处理器外设资源管理:从RDC到SEMA42的实战指南
1. 多核异构处理器的资源管理挑战与核心思路在嵌入式系统开发领域,尤其是高性能应用场景,多核异构处理器正变得越来越普遍。这类处理器通常将高性能应用处理器(如 Arm Cortex-A 系列)与实时微控制器(如 Arm Cortex-M 系…...