通过字符设备驱动并编写应用程序控制三盏灯亮灭
现象 键盘按1三灯全亮 按0三灯全灭
头文件.h
#ifndef __HEAD_H__
#define __HEAD_H__
#define PHY_LED1_MODER 0X50006000
#define PHY_LED1_ODR 0X50006014
#define PHY_RCC 0X50000A28#define PHY_LED2_MODER 0X50007000
#define PHY_LED2_ODR 0X50007014#define PHY_LED3_MODER 0X50006000
#define PHY_LED3_ODR 0X50006014#endif驱动程序demo.c
#include <linux/init.h>
#include <linux/module.h>
#include <linux/fs.h>
#include <linux/uaccess.h>
#include <linux/io.h>
#include "head.h"
unsigned int major;
char kbuf[128] = {};
// 定义三个指针指向映射后的虚拟内存
unsigned int *vir_led1_moder;
unsigned int *vir_led1_odr;
unsigned int *vir_led2_moder;
unsigned int *vir_led2_odr;
unsigned int *vir_led3_moder;
unsigned int *vir_led3_odr;
unsigned int *vir_rcc;
// 封装操作方法
int mycdev_open(struct inode *inode, struct file *file)
{printk("%s:%s:%d\n", __FILE__, __func__, __LINE__);return 0;
}
ssize_t mycdev_read(struct file *file, char *ubuf, size_t size, loff_t *lof)
{printk("%s:%s:%d\n", __FILE__, __func__, __LINE__);int ret;ret = copy_to_user(ubuf, kbuf, size);if (ret){printk("copy_to_user filed\n");return -EIO;}return 0;
}
ssize_t mycdev_write(struct file *file, const char *ubuf, size_t size, loff_t *lof)
{printk("%s:%s:%d\n", __FILE__, __func__, __LINE__);int ret;ret = copy_from_user(kbuf, ubuf, size);if (ret){printk("copy_from_user filed\n");return -EIO;}if (kbuf[0] == '0') // 关灯{// 关灯逻辑(*vir_led1_odr) &= (~(0X1<<10));//默认关灯(*vir_led2_odr) &= (~(0X1<<10));//默认关灯(*vir_led3_odr) &= (~(0X1<<8));//默认关灯}else if (kbuf[0] == '1'){// 开灯逻辑(*vir_led1_odr) |= (0X1<<10);(*vir_led2_odr) |= (0X1<<10);(*vir_led3_odr) |= (0X1<<8);}return 0;
}
int mycdev_close(struct inode *inode, struct file *file)
{printk("%s:%s:%d\n", __FILE__, __func__, __LINE__);return 0;
}
// 定义操作方法结构体对象
struct file_operations fops = {.open = mycdev_open,.read = mycdev_read,.write = mycdev_write,.release = mycdev_close,
};
static int __init mycdev_init(void)
{// 注册字符设备驱动major = register_chrdev(0, "mychrdev", &fops);if (major < 0){printk("字符设备驱动注册失败\n");return major;}printk("注册字符设备驱动成功major=%d\n", major);// 进行寄存器的地址映射// LED1寄存器地址映射vir_led1_moder = ioremap(PHY_LED1_MODER, 4);if (vir_led1_moder == NULL){printk("物理内存地址映射失败%d\n", __LINE__);return -EFAULT;}vir_led1_odr = ioremap(PHY_LED1_ODR, 4);if (vir_led1_odr == NULL){printk("物理内存地址映射失败%d\n", __LINE__);return -EFAULT;}//LED2寄存器地址映射vir_led2_moder = ioremap(PHY_LED2_MODER, 4);if (vir_led2_moder == NULL){printk("物理内存地址映射失败%d\n", __LINE__);return -EFAULT;}vir_led2_odr = ioremap(PHY_LED2_ODR, 4);if (vir_led2_odr == NULL){printk("物理内存地址映射失败%d\n", __LINE__);return -EFAULT;}//LED3寄存器地址映射vir_led3_moder = ioremap(PHY_LED3_MODER, 4);if (vir_led3_moder == NULL){printk("物理内存地址映射失败%d\n", __LINE__);return -EFAULT;}vir_led3_odr = ioremap(PHY_LED3_ODR, 4);if (vir_led3_odr == NULL){printk("物理内存地址映射失败%d\n", __LINE__);return -EFAULT;}//RCC寄存器地址映射vir_rcc = ioremap(PHY_RCC, 4);if (vir_rcc == NULL){printk("物理内存地址映射失败%d\n", __LINE__);return -EFAULT;}printk("寄存器内存映射成功\n");//LED1寄存器初始化(*vir_rcc) |= (0X3<<4);//GPIOEF控制器时钟使能(*vir_led1_moder) &= (~(0X3<<20));//MODER[21:20]->00(*vir_led1_moder) |= (0X1<<20);//MODER[21:20]->01(*vir_led1_odr) &= (~(0X1<<10));//默认关灯//LED2寄存器初始化(*vir_led2_moder) &= (~(0X3<<20));//MODER[21:20]->00(*vir_led2_moder) |= (0X1<<20);//MODER[21:20]->01(*vir_led2_odr) &= (~(0X1<<10));//默认关灯//LED3寄存器初始化(*vir_led3_moder) &= (~(0X3<<16));//MODER[17:16]->00(*vir_led3_moder) |= (0X1<<16);//MODER[17:16]->01(*vir_led3_odr) &= (~(0X1<<8));//默认关灯return 0;
}
static void __exit mycdev_exit(void)
{//取消内存映射iounmap(vir_led1_moder);iounmap(vir_led1_odr);iounmap(vir_rcc);iounmap(vir_led2_moder);iounmap(vir_led2_odr);iounmap(vir_led3_moder);iounmap(vir_led3_odr);// 注销字符设备驱动unregister_chrdev(major, "mychrdev");
}
module_init(mycdev_init);
module_exit(mycdev_exit);
MODULE_LICENSE("GPL");
应用程序test.c
#include <stdio.h>
#include <sys/types.h>
#include <sys/stat.h>
#include <fcntl.h>
#include <unistd.h>
#include <string.h>
int main(int argc, char const *argv[])
{char buf[128] = {0};int fd = open("/dev/mychrdev", O_RDWR);if (fd < 0){printf("打开设备文件失败\n");return -1;}printf("打开设备文件成功\n");while (1){printf("请输入要进行的操作:0(关灯)1(开灯)>");fgets(buf, sizeof(buf), stdin); // 在终端读一个字符串buf[strlen(buf) - 1] = '\0';write(fd, buf, sizeof(buf)); // 将数据传递给内核}close(fd);return 0;
}
现象为:
相关文章:
通过字符设备驱动并编写应用程序控制三盏灯亮灭
现象 键盘按1三灯全亮 按0三灯全灭 头文件.h #ifndef __HEAD_H__ #define __HEAD_H__ #define PHY_LED1_MODER 0X50006000 #define PHY_LED1_ODR 0X50006014 #define PHY_RCC 0X50000A28#define PHY_LED2_MODER 0X50007000 #define PHY_LED2_ODR 0X50007014#defin…...
SpringCloud链路追踪——Spring Cloud Sleuth 和 Zipkin 介绍 Windows 下使用初步
前言 在微服务中,随着服务越来越多,对调用链的分析越来越复杂。如何能够分析调用链,定位微服务中的调用瓶颈,并对其进行解决。 本篇博客介绍springCloud中用到的链路追踪的组件,Spring Cloud Sleuth和Zipkin…...
深入探究音视频开源库 WebRTC 中 NetEQ 音频抗网络延时与抗丢包的实现机制
目录 1、引言 2、什么是NetEQ? 3、NetEQ技术详解 3.1、NetEQ概述 3.2、抖动消除技术 3.3、丢包补偿技术 3.4、NetEQ概要设计 3.5、NetEQ的命令机制 3.6、NetEQ的播放机制 3.7、MCU的控制机制 3.8、DSP的算法处理 3.9、DSP算法的模拟测试 4、NetEQ源文件…...
一篇文章教会你C++11入门知识点
C11入门 列表初始化1. {}初始化2. initializer_list 声明1. auto2. decltype3. nullptr 范围for循环STL新增容器1. array2. forward_list3. unordered_map和unordered_set 右值引用和移动语义1. 左值引用和右值引用2. 左值引用和右值引用比较3. 右值引用使用场景和意义4. 右值引…...
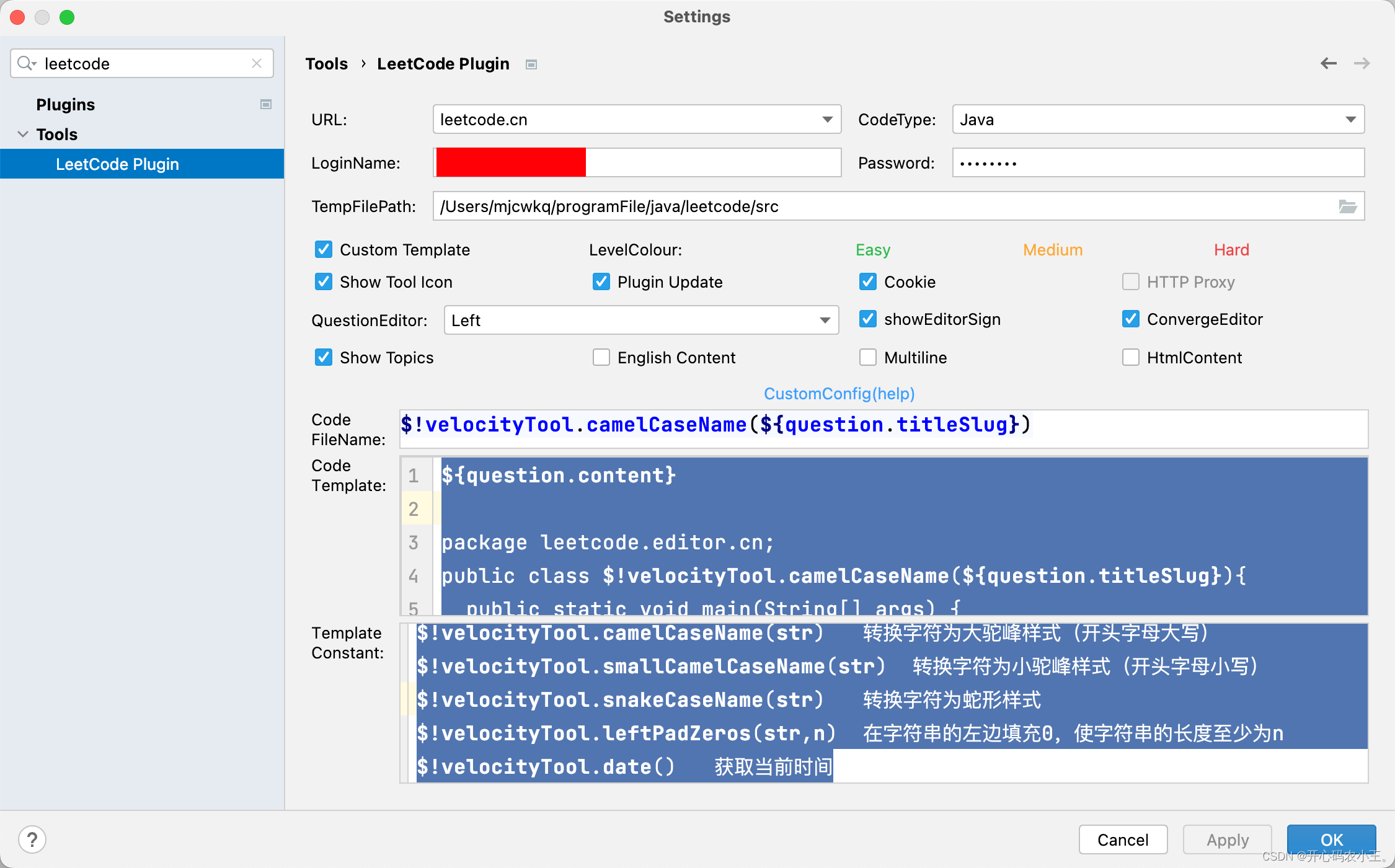
idea leetcode配置
idea leetcode配置 配置页面如下图所示,根据需要,填入登录用户名、密码、文件存放路径,注意如果要使用自定义的代码结构配置,要勾选图中框出来的选项。 Code FileName: $!velocityTool.camelCaseName(${question.tit…...
原理解析)
Golang通道(Channel)原理解析
引言 并发编程是现代软件开发中的一个重要主题。Golang作为一门并发友好的编程语言,提供了一种简单而强大的机制,即通道(Channel),用于在不同的Goroutine之间进行通信和同步。通道的设计和原理是Golang并发模型的核心…...

使用树莓派搭建文件共享服务器-samba服务器
局域网内部通过文件共享来传输文件是一种非常方便的方式,小米摄像头也支持用文件共享smb模式将视频备份到局域网中的文件服务器上。之前我一直使用荣耀pro路由器游戏版,是自带USB接口支持文件共享服务的,接上USB移动硬盘,小米摄像…...
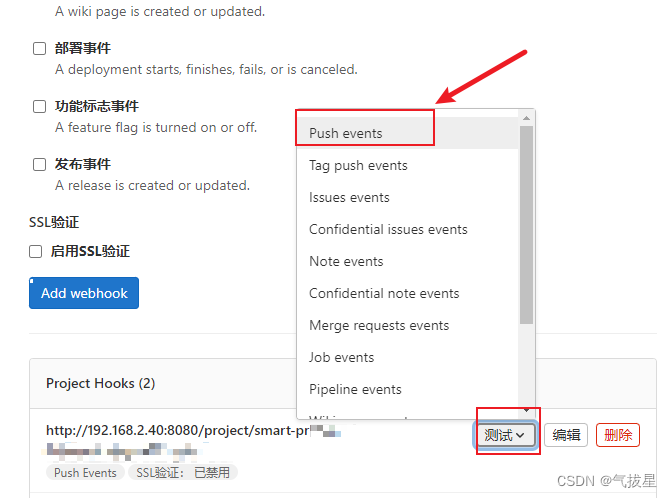
GitLab使用webhook触发Jenkins自动构建
1、jenkins安装gitlab插件 在插件管理中,搜索gitlab安装这个插件。 2、job中配置webhook地址和密钥 进入job设置,构建触发器中就可以看到gitlab的webhook配置,复制URL地址和随机令牌至gitlab中 勾选后,就可以展开设置ÿ…...
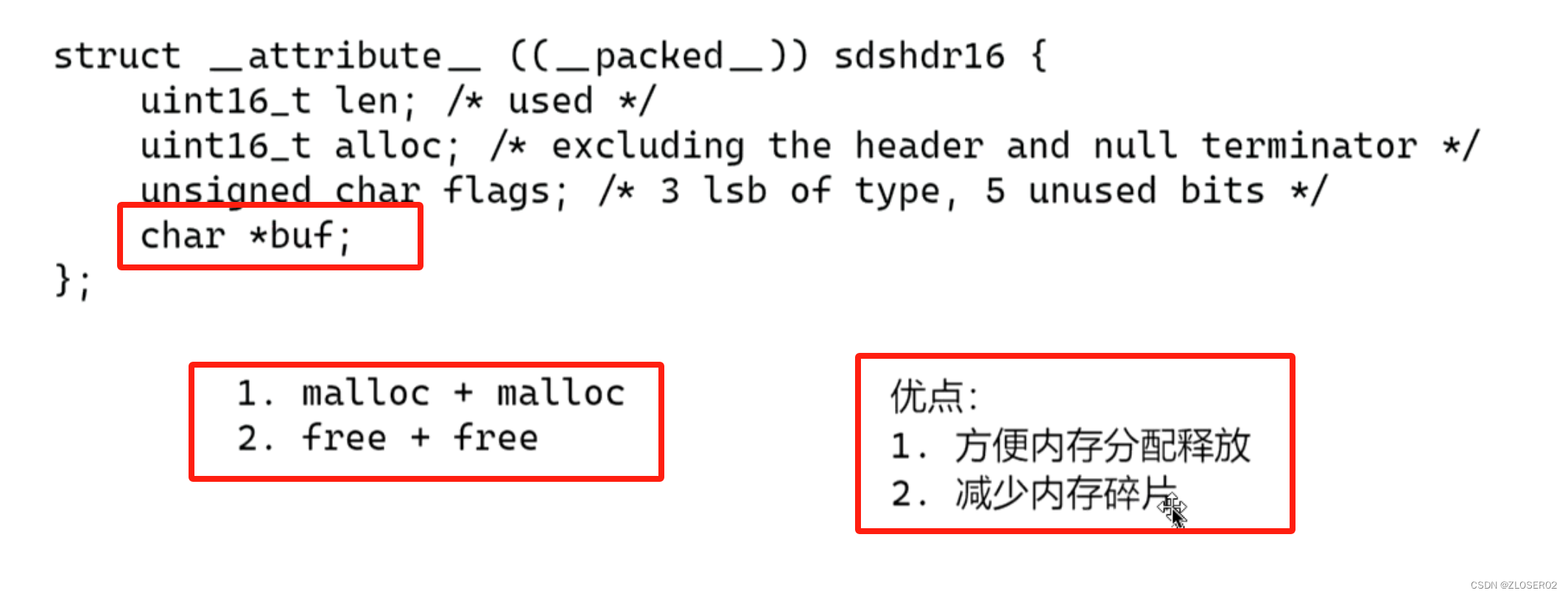
柔性数组的使用及注意事项
1.柔性数组在结构体当中,并且在结构体的最后面. 2.结构体中除了柔型数组外至少还要有一个其他成员. 3.sizeof()返回结构体的大小不包含柔性数组的大小. 4.malloc 例:struct sdshdr16 *p malloc(sizeof (struct sdshdr16) 32); // 32 为柔性数组的大小 5.free 例: fre…...
数学建模——最优连接(基于最小支撑树)
一、概念 1、图的生成树 由图G(V,E)的生成子图G1(V,E1)(E1是E的子集)是一棵树,则称该树为图G的生成树(支撑树),简称G的树。图G有支撑树的充分必要条件为图G连通。 2、最小生成树问题 连通图G(V,E),每条边…...

【LeetCode】43. 字符串相乘
1 问题 给定两个以字符串形式表示的非负整数 num1 和 num2,返回 num1 和 num2 的乘积,它们的乘积也表示为字符串形式。 注意:不能使用任何内置的 BigInteger 库或直接将输入转换为整数。 示例 1: 输入: num1 “2”, num2 “3” 输出: “…...

车联网之电子围栏模型使用翻滚窗口【二十一】
1. 电子围栏模型使用翻滚窗口 l 创建90秒翻滚窗口,计算中电子围栏信息(ElectricFenceModel中的值根据车辆是否在围栏内进行设置) 设置电子围栏水印 根据vin进行分组 创建翻滚窗口,90秒为一个窗口周期 自定义窗口函数,计算电子围栏中和围栏外车辆信息 1.1 创建90秒翻滚窗口 …...

图形库篇 | EasyX | 基本介绍
图形库篇 | EasyX | 基本介绍 简介 EasyX 是一个针对 C/C 的图形库,可以帮助 C/C 初学者快速上手图形和游戏编程。 比如,可以基于 EasyX 图形库很快的用几何图形画一个房子,或者一辆移动的小车,可以编写俄罗斯方块、贪吃蛇、黑白…...
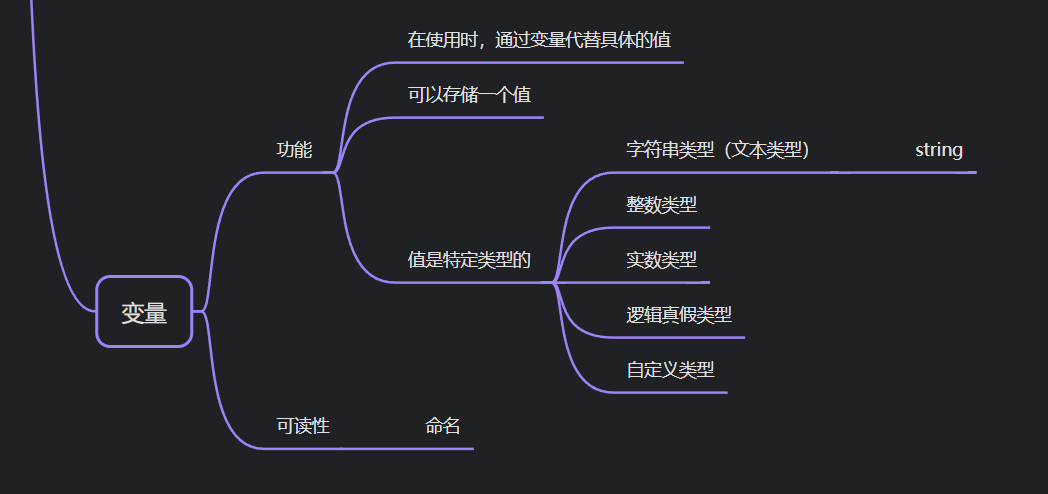
凉鞋的 Unity 笔记 202. 变量概述与简介
202. 变量概述与简介 想要用好变量不是一件简单的事情,因为变量需要命名。 我们可以从两个角度看待一个变量,第一个角度是变量的功能,第二个是变量的可读性。 变量的功能其实非常简单,变量可以存储一个值,这个值是特…...
基于主动移频法与AFD孤岛检测的单相并网逆变器仿真(Simulink仿真实现)
💥💥💞💞欢迎来到本博客❤️❤️💥💥 🏆博主优势:🌞🌞🌞博客内容尽量做到思维缜密,逻辑清晰,为了方便读者。 ⛳️座右铭&a…...
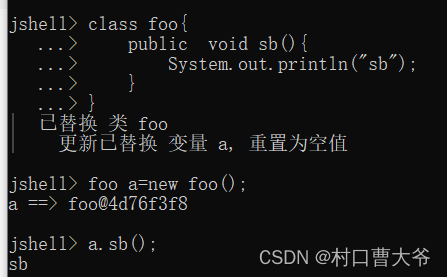
jvm的jshell,学生的工具
jshell 在我眼里,只能作为学校教学的一个玩具,事实上官方也做了解释,以下是官方的解释: 在学习编程语言时,即时反馈很重要,并且 它的 API。学校引用远离Java的首要原因 教学语言是其他语言有一个“REPL”…...

深度解析 Bing 搜索引擎的排名因素与算法
自从和ChatGPT搞上了,Bing在搜索引擎界就像是新晋的网红,风头一时无两。 搜索引擎的排名算法是确定搜索结果排名的核心,每个搜索引擎都有其独特的排名规则和算法。Bing作为全球第二大搜索引擎,其排名因素和算法同样至关重要。在本…...

使用自定义 PyTorch 运算符优化深度学习数据输入管道
在这篇文章[1]中,我们讨论 PyTorch 对创建自定义运算符的支持,并演示它如何帮助我们解决数据输入管道的性能瓶颈、加速深度学习工作负载并降低训练成本。 构建 PyTorch 扩展 PyTorch 提供了多种创建自定义操作的方法,包括使用自定义模块和/或…...

瑞芯微RKNN开发·yolov5
官方预训练模型转换 下载yolov5-v6.0分支源码解压到本地,并配置基础运行环境。下载官方预训练模型 yolov5n.ptyolov5s.ptyolov5m.pt… 进入yolov5-6.0目录下,新建文件夹weights,并将步骤2中下载的权重文件放进去。修改models/yolo.py文件 …...

Flutter之Widget生命周期
目录 初始化构造函数initStatedidChangeDependencies 运行时builddidUpdateWidget 组件移除deactivatedisposereassemble 函数生命周期说明:实际场景App生命周期 前言:生命周期是一个组件加载到卸载的整个周期,熟悉生命周期可以让我们在合适的…...

Steam卡片自动化收集引擎:Idle Master架构深度解析与技术实现
Steam卡片自动化收集引擎:Idle Master架构深度解析与技术实现 【免费下载链接】idle_master Get your Steam Trading Cards the Easy Way 项目地址: https://gitcode.com/gh_mirrors/id/idle_master 在Steam游戏生态系统中,交易卡片的收集机制既为…...

告别复杂手打:3个技巧让你用GSE轻松实现魔兽世界智能一键输出
告别复杂手打:3个技巧让你用GSE轻松实现魔兽世界智能一键输出 【免费下载链接】GSE-Advanced-Macro-Compiler GSE is an alternative advanced macro editor and engine for World of Warcraft. 项目地址: https://gitcode.com/gh_mirrors/gs/GSE-Advanced-Macro…...

YuukiPS启动器:终极免费动漫游戏一键启动解决方案
YuukiPS启动器:终极免费动漫游戏一键启动解决方案 【免费下载链接】Launcher-PC 项目地址: https://gitcode.com/gh_mirrors/la/Launcher-PC 还在为复杂的游戏配置和繁琐的补丁更新而烦恼吗?YuukiPS启动器正是为你量身定制的终极解决方案&#x…...

G-Helper华硕笔记本控制工具:如何实现轻量级性能管理与硬件优化
G-Helper华硕笔记本控制工具:如何实现轻量级性能管理与硬件优化 【免费下载链接】g-helper Lightweight, open-source control tool for ASUS laptops and ROG Ally. Manage performance modes, fans, GPU, battery, and RGB lighting across Zephyrus, Flow, TUF, …...

别再只会用巴特沃斯了!用MATLAB的ellip函数5分钟搞定一个陡降的椭圆滤波器
椭圆滤波器实战指南:如何用MATLAB轻松实现陡降滤波效果 在信号处理领域,工程师们常常面临一个经典难题:如何在有限的硬件资源下,实现尽可能陡峭的滤波器过渡带?许多开发者习惯性地选择巴特沃斯滤波器,因为它…...
)
路径规划内存告急?手把手教你用RRT算法为嵌入式设备减负(附ROS实验对比)
路径规划内存告急?手把手教你用RRT算法为嵌入式设备减负(附ROS实验对比) 在资源受限的嵌入式机器人开发中,内存管理往往成为制约系统性能的瓶颈。当你的树莓派或Jetson Nano在运行A*算法时频繁触发内存告警,或是因地图…...

从IDEA转VSCode做工业自动化开发?这7个调试断点失效原因,工程师凌晨三点还在查!
更多请点击: https://intelliparadigm.com 第一章:VSCode工业自动化调试的底层逻辑与认知重构 VSCode 并非传统意义上的 IDE,而是一个基于事件驱动、插件化架构的可扩展开发平台。在工业自动化场景中(如 PLC 逻辑仿真、OPC UA 协…...

新手必看:Qwen3语义雷达,从部署到实战,完整语义搜索体验
新手必看:Qwen3语义雷达,从部署到实战,完整语义搜索体验 1. 引言:为什么需要语义搜索? 想象一下,你在一个庞大的文档库中搜索"如何解决电脑卡顿",传统的关键词搜索可能只会返回包含…...

C和C++的区别详解
通过程序来介绍12345678//c program#include<iostream>using namespace std;int main(void){cout << "This is a c program." << endl;return 0;}1.iostream文件iostream中的io指的是输入(进入程序的信息)和输出(…...
即插即用系列(代码实践) | CVPR 2024 RMT:既要全局感受野,又要 CNN 的局部性?一种拥有显式空间先验的线性 Transformer
论文题目:RMT: Retentive Networks Meet Vision Transformers 中文题目:RMT:保留网络遇见视觉Transformer 论文出处:arXiv 2023 / 中科院自动化所 (CVPR 2024) 论文原文 (Paper):https://arxiv.org/abs/2309.11523 代码 (code):https://github.com/qhfan/RMT 目录 第一部…...