【论文阅读】以及部署BEVFusion: A Simple and Robust LiDAR-Camera Fusion Framework
BEVFusion: A Simple and Robust LiDAR-Camera Fusion Framework
BEVFusion:一个简单而强大的LiDAR-相机融合框架
NeurIPS 2022
多模态传感器融合意味着信息互补、稳定,是自动驾驶感知的重要一环,本文注重工业落地,实际应用
融合方案:
前融合(数据级融合)指通过空间对齐直接融合不同模态的原始传感器数据。
深度融合(特征级融合)指通过级联或者元素相乘在特征空间中融合跨模态数据。
后融合(目标级融合)指将各模态模型的预测结果进行融合,做出最终决策。
//
框架与以前的激光雷达-相机融合方法的比较:

a.将图像特征投影到原始点云上的点级融合机制
从点出发,从点云中采样一些点,然后根据相机的内参和外参矩阵,投影到图像上,采样到图像特征,然后拼接回点云,利用融合后的特征经过点云处理模块去做3D检测
b.将LiDAR 特征或建议分别投影到每个视图图像上以提取RGB信息的特征级融合机制
将两种模态的中间特征通过内外参矩阵,拼接投影,融合出完整的特征,传递的是query,输入点云,通过一个点云网络,得到初始位置,初始位置去图像上采样特征,采样完再拼接到原始点云特征上
c.提出将相机网络与LiDAR输入分离
相机内外参偏差,点云投影会有偏差;相机卡帧;雷达出问题
前两种有主次依赖关系,一方出错影响另一方,故提出并行框架
///
BEVFusion主体结构
包括相机模块Camera Stream,点云模块LiDAR Stream以及融合模块
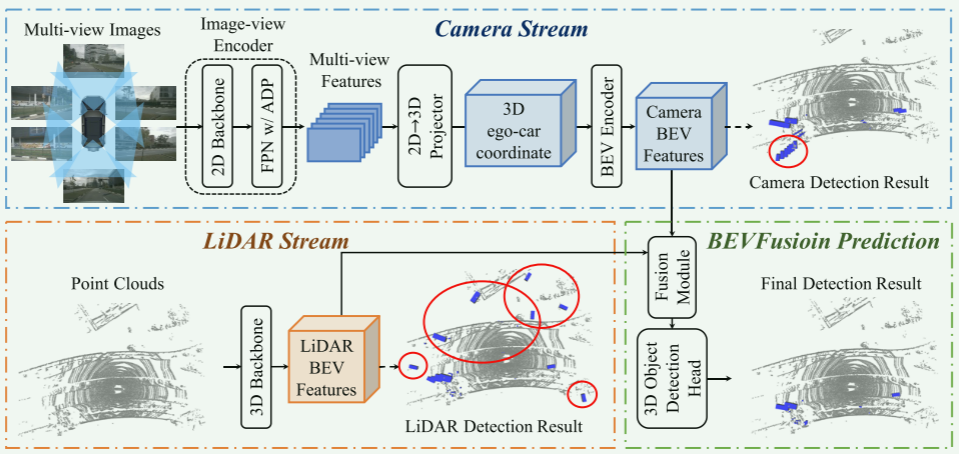
图像分支:
Camera Stream设计流程:
步骤1:2D Backbone提取基础图像特征(LSS)
步骤2:FPN+ADP,多尺度特征融合
步骤3:2D → 3D特征转换模块
步骤4:3D → BEV特征编码模块
输出:Camera BEV Features
//
FPN+ADP设计流程: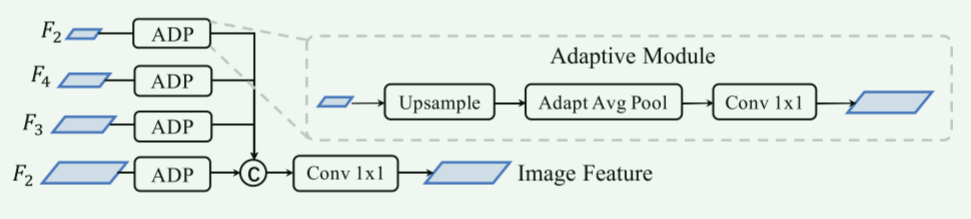
输入:基础图像特征
步骤1:每层特征使用ADP模块
步骤2:ADP模块包括上采样、池化、卷积
步骤3:多层特征融合
输出:多尺度融合特征
/
2D → 3D特征转换模块:
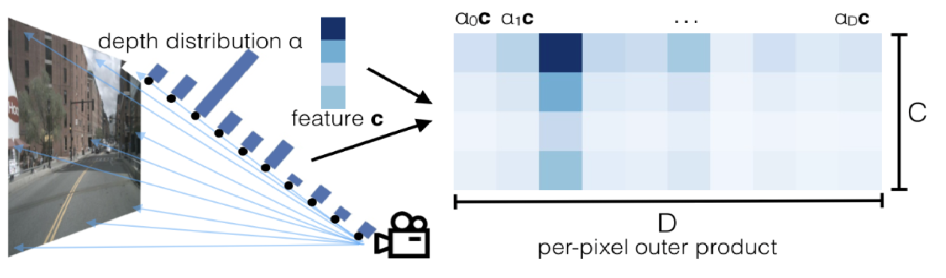
输入:多尺度融合特征
步骤1:深度分布估计
步骤2:2D到3D投影计算
输出:3D伪体素特征
/
点云分支
LiDAR Stream设计流程:
输入:原始点云
主要步骤:通过3D Backbone,处理原始点云数据,同时压缩到BEV空间,生成BEV特征
输出:LiDAR BEV Features
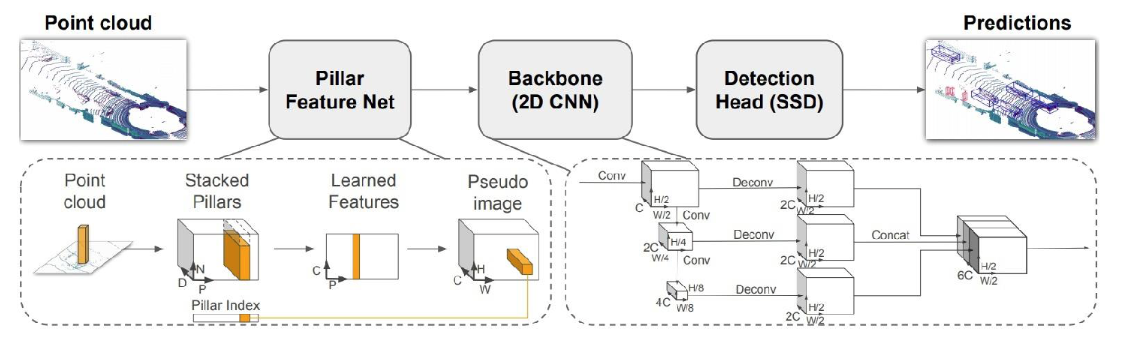
用的是 pointpillar结构 点柱
Fusion Module
融合模块
Fusion Module设计流程:
输入:点云和图像BEV特征
步骤1:按通道维度级联点云和图像BEV特征,再通过卷积网络提取级联后的特征
步骤2:通过全局平均池化和卷积预测,实现对级联特征的自适应挑选
输出:融合后的特征

/
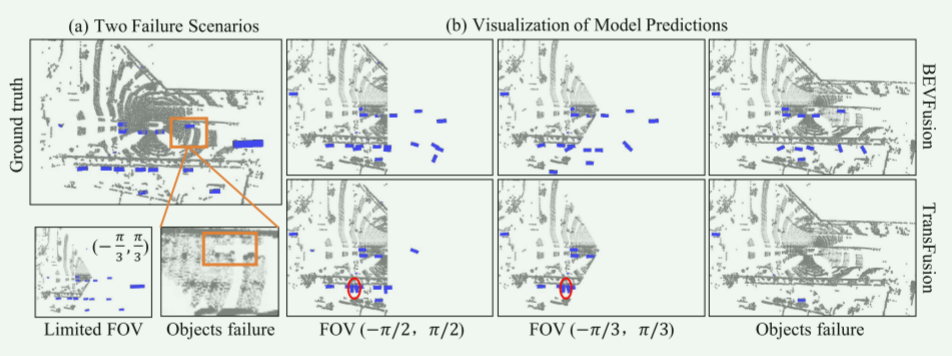
模态消融实验:

多模态的可行性,橙色框表示该范围内物体点云信息被丢弃,但BEVFusion可以通过camera分支恢复
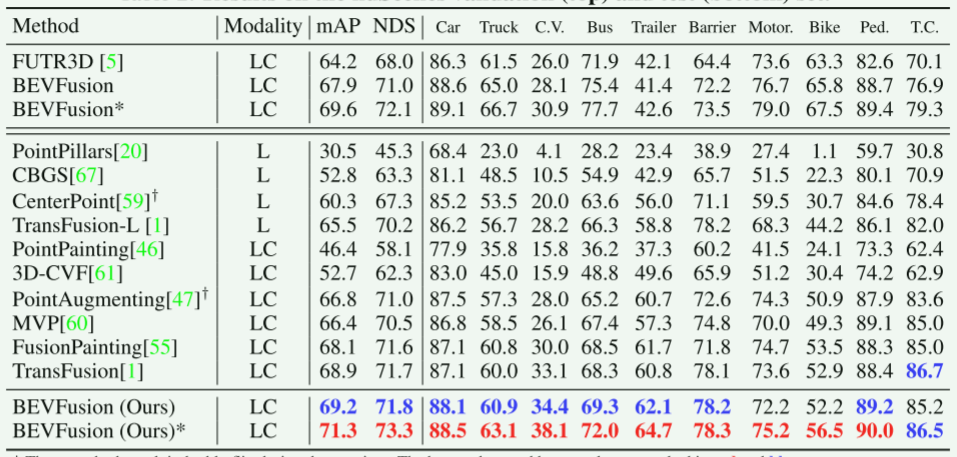
nuScenes验证集(上)和测试集(下)的结果:
/
阿里&北大版本的bevfusion环境部署:
首先git项目
https://github.com/ADLab-AutoDrive/BEVFusion.git
mmdet - INFO - Environment info:
------------------------------------------------------------
sys.platform: linux
Python: 3.8.3 (default, Jul 2 2020, 16:21:59) [GCC 7.3.0]
CUDA available: True
GPU 0,1: NVIDIA GeForce RTX 3090
CUDA_HOME: /usr/local/cuda
NVCC: Build cuda_11.1.TC455_06.29190527_0
GCC: gcc (Ubuntu 7.5.0-3ubuntu1~18.04) 7.5.0
PyTorch: 1.8.0+cu111
PyTorch compiling details: PyTorch built with:- GCC 7.3- C++ Version: 201402- Intel(R) Math Kernel Library Version 2020.0.0 Product Build 20191122 for Intel(R) 64 architecture applications- Intel(R) MKL-DNN v1.7.0 (Git Hash 7aed236906b1f7a05c0917e5257a1af05e9ff683)- OpenMP 201511 (a.k.a. OpenMP 4.5)- NNPACK is enabled- CPU capability usage: AVX2- CUDA Runtime 11.1- NVCC architecture flags: -gencode;arch=compute_37,code=sm_37;-gencode;arch=compute_50,code=sm_50;-gencode;arch=compute_60,code=sm_60;-gencode;arch=compute_70,code=sm_70;-gencode;arch=compute_75,code=sm_75;-gencode;arch=compute_80,code=sm_80;-gencode;arch=compute_86,code=sm_86- CuDNN 8.0.5- Magma 2.5.2- Build settings: BLAS_INFO=mkl, BUILD_TYPE=Release, CUDA_VERSION=11.1, CUDNN_VERSION=8.0.5, CXX_COMPILER=/opt/rh/devtoolset-7/root/usr/bin/c++, CXX_FLAGS= -Wno-deprecated -fvisibility-inlines-hidden -DUSE_PTHREADPOOL -fopenmp -DNDEBUG -DUSE_KINETO -DUSE_FBGEMM -DUSE_QNNPACK -DUSE_PYTORCH_QNNPACK -DUSE_XNNPACK -O2 -fPIC -Wno-narrowing -Wall -Wextra -Werror=return-type -Wno-missing-field-initializers -Wno-type-limits -Wno-array-bounds -Wno-unknown-pragmas -Wno-sign-compare -Wno-unused-parameter -Wno-unused-variable -Wno-unused-function -Wno-unused-result -Wno-unused-local-typedefs -Wno-strict-overflow -Wno-strict-aliasing -Wno-error=deprecated-declarations -Wno-stringop-overflow -Wno-psabi -Wno-error=pedantic -Wno-error=redundant-decls -Wno-error=old-style-cast -fdiagnostics-color=always -faligned-new -Wno-unused-but-set-variable -Wno-maybe-uninitialized -fno-math-errno -fno-trapping-math -Werror=format -Wno-stringop-overflow, LAPACK_INFO=mkl, PERF_WITH_AVX=1, PERF_WITH_AVX2=1, PERF_WITH_AVX512=1, TORCH_VERSION=1.8.0, USE_CUDA=ON, USE_CUDNN=ON, USE_EXCEPTION_PTR=1, USE_GFLAGS=OFF, USE_GLOG=OFF, USE_MKL=ON, USE_MKLDNN=ON, USE_MPI=OFF, USE_NCCL=ON, USE_NNPACK=ON, USE_OPENMP=ON, TorchVision: 0.9.0+cu111
OpenCV: 4.8.1
MMCV: 1.4.0
MMCV Compiler: GCC 7.3
MMCV CUDA Compiler: 11.1
MMDetection: 2.11.0
MMDetection3D: 0.11.0+fb4384c
------------------------------------------------------------
库:
# packages in environment at /root/miniconda3/envs/bevfusion:
#
# Name Version Build Channel
_libgcc_mutex 0.1 main https://mirrors.ustc.edu.cn/anaconda/pkgs/main
_openmp_mutex 5.1 1_gnu https://mirrors.ustc.edu.cn/anaconda/pkgs/main
absl-py 2.0.0 pypi_0 pypi
addict 2.4.0 pypi_0 pypi
anyio 4.0.0 pypi_0 pypi
argon2-cffi 23.1.0 pypi_0 pypi
argon2-cffi-bindings 21.2.0 pypi_0 pypi
arrow 1.3.0 pypi_0 pypi
asttokens 2.4.0 pypi_0 pypi
async-lru 2.0.4 pypi_0 pypi
attrs 23.1.0 pypi_0 pypi
babel 2.13.0 pypi_0 pypi
backcall 0.2.0 pypi_0 pypi
beautifulsoup4 4.12.2 pypi_0 pypi
black 23.9.1 pypi_0 pypi
bleach 6.1.0 pypi_0 pypi
ca-certificates 2023.08.22 h06a4308_0 https://mirrors.ustc.edu.cn/anaconda/pkgs/main
cachetools 5.3.1 pypi_0 pypi
certifi 2023.7.22 pypi_0 pypi
cffi 1.16.0 pypi_0 pypi
charset-normalizer 3.3.0 pypi_0 pypi
click 8.1.7 pypi_0 pypi
comm 0.1.4 pypi_0 pypi
contourpy 1.1.1 pypi_0 pypi
cycler 0.12.1 pypi_0 pypi
cython 0.29.32 pypi_0 pypi
debugpy 1.8.0 pypi_0 pypi
decorator 5.1.1 pypi_0 pypi
defusedxml 0.7.1 pypi_0 pypi
descartes 1.1.0 pypi_0 pypi
exceptiongroup 1.1.3 pypi_0 pypi
executing 2.0.0 pypi_0 pypi
fastjsonschema 2.18.1 pypi_0 pypi
filelock 3.12.4 pypi_0 pypi
fire 0.5.0 pypi_0 pypi
flake8 6.1.0 pypi_0 pypi
fonttools 4.43.1 pypi_0 pypi
fqdn 1.5.1 pypi_0 pypi
fsspec 2023.9.2 pypi_0 pypi
google-auth 2.23.3 pypi_0 pypi
google-auth-oauthlib 1.0.0 pypi_0 pypi
grpcio 1.59.0 pypi_0 pypi
huggingface-hub 0.18.0 pypi_0 pypi
idna 3.4 pypi_0 pypi
imageio 2.31.5 pypi_0 pypi
importlib-metadata 6.8.0 pypi_0 pypi
importlib-resources 6.1.0 pypi_0 pypi
iniconfig 2.0.0 pypi_0 pypi
ipykernel 6.25.2 pypi_0 pypi
ipython 8.12.3 pypi_0 pypi
ipython-genutils 0.2.0 pypi_0 pypi
ipywidgets 8.1.1 pypi_0 pypi
isoduration 20.11.0 pypi_0 pypi
jedi 0.19.1 pypi_0 pypi
jinja2 3.1.2 pypi_0 pypi
joblib 1.3.2 pypi_0 pypi
json5 0.9.14 pypi_0 pypi
jsonpointer 2.4 pypi_0 pypi
jsonschema 4.19.1 pypi_0 pypi
jsonschema-specifications 2023.7.1 pypi_0 pypi
jupyter 1.0.0 pypi_0 pypi
jupyter-client 8.4.0 pypi_0 pypi
jupyter-console 6.6.3 pypi_0 pypi
jupyter-core 5.4.0 pypi_0 pypi
jupyter-events 0.7.0 pypi_0 pypi
jupyter-lsp 2.2.0 pypi_0 pypi
jupyter-server 2.7.3 pypi_0 pypi
jupyter-server-terminals 0.4.4 pypi_0 pypi
jupyterlab 4.0.7 pypi_0 pypi
jupyterlab-pygments 0.2.2 pypi_0 pypi
jupyterlab-server 2.25.0 pypi_0 pypi
jupyterlab-widgets 3.0.9 pypi_0 pypi
kiwisolver 1.4.5 pypi_0 pypi
ld_impl_linux-64 2.38 h1181459_1 https://mirrors.ustc.edu.cn/anaconda/pkgs/main
libffi 3.3 he6710b0_2 https://mirrors.ustc.edu.cn/anaconda/pkgs/main
libgcc-ng 11.2.0 h1234567_1 https://mirrors.ustc.edu.cn/anaconda/pkgs/main
libgomp 11.2.0 h1234567_1 https://mirrors.ustc.edu.cn/anaconda/pkgs/main
libstdcxx-ng 11.2.0 h1234567_1 https://mirrors.ustc.edu.cn/anaconda/pkgs/main
llvmlite 0.31.0 pypi_0 pypi
lyft-dataset-sdk 0.0.8 pypi_0 pypi
markdown 3.5 pypi_0 pypi
markupsafe 2.1.3 pypi_0 pypi
matplotlib 3.6.2 pypi_0 pypi
matplotlib-inline 0.1.6 pypi_0 pypi
mccabe 0.7.0 pypi_0 pypi
mistune 3.0.2 pypi_0 pypi
mmcv-full 1.4.0 pypi_0 pypi
mmdet 2.11.0 dev_0 <develop>
mmdet3d 0.11.0 dev_0 <develop>
mmpycocotools 12.0.3 pypi_0 pypi
mypy-extensions 1.0.0 pypi_0 pypi
nbclient 0.8.0 pypi_0 pypi
nbconvert 7.9.2 pypi_0 pypi
nbformat 5.9.2 pypi_0 pypi
ncurses 6.4 h6a678d5_0 https://mirrors.ustc.edu.cn/anaconda/pkgs/main
nest-asyncio 1.5.8 pypi_0 pypi
networkx 2.2 pypi_0 pypi
notebook 7.0.5 pypi_0 pypi
notebook-shim 0.2.3 pypi_0 pypi
numba 0.48.0 pypi_0 pypi
numpy 1.19.5 pypi_0 pypi
nuscenes-devkit 1.1.9 pypi_0 pypi
oauthlib 3.2.2 pypi_0 pypi
opencv-python 4.8.1.78 pypi_0 pypi
openssl 1.1.1w h7f8727e_0 https://mirrors.ustc.edu.cn/anaconda/pkgs/main
overrides 7.4.0 pypi_0 pypi
packaging 23.2 pypi_0 pypi
pandas 1.4.4 pypi_0 pypi
pandocfilters 1.5.0 pypi_0 pypi
parso 0.8.3 pypi_0 pypi
pathspec 0.11.2 pypi_0 pypi
pexpect 4.8.0 pypi_0 pypi
pickleshare 0.7.5 pypi_0 pypi
pillow 10.1.0 pypi_0 pypi
pip 23.2.1 py38h06a4308_0 https://mirrors.ustc.edu.cn/anaconda/pkgs/main
pkgutil-resolve-name 1.3.10 pypi_0 pypi
platformdirs 3.11.0 pypi_0 pypi
plotly 5.11.0 pypi_0 pypi
pluggy 1.3.0 pypi_0 pypi
plyfile 1.0.1 pypi_0 pypi
prometheus-client 0.17.1 pypi_0 pypi
prompt-toolkit 3.0.39 pypi_0 pypi
protobuf 4.24.4 pypi_0 pypi
psutil 5.9.6 pypi_0 pypi
ptyprocess 0.7.0 pypi_0 pypi
pure-eval 0.2.2 pypi_0 pypi
pyasn1 0.5.0 pypi_0 pypi
pyasn1-modules 0.3.0 pypi_0 pypi
pycocotools 2.0.7 pypi_0 pypi
pycodestyle 2.11.1 pypi_0 pypi
pycparser 2.21 pypi_0 pypi
pyflakes 3.1.0 pypi_0 pypi
pygments 2.16.1 pypi_0 pypi
pyparsing 3.1.1 pypi_0 pypi
pyquaternion 0.9.9 pypi_0 pypi
pytest 7.4.2 pypi_0 pypi
python 3.8.3 hcff3b4d_2 https://mirrors.ustc.edu.cn/anaconda/pkgs/main
python-dateutil 2.8.2 pypi_0 pypi
python-json-logger 2.0.7 pypi_0 pypi
pytz 2023.3.post1 pypi_0 pypi
pywavelets 1.4.1 pypi_0 pypi
pyyaml 6.0.1 pypi_0 pypi
pyzmq 25.1.1 pypi_0 pypi
qtconsole 5.4.4 pypi_0 pypi
qtpy 2.4.0 pypi_0 pypi
readline 8.2 h5eee18b_0 https://mirrors.ustc.edu.cn/anaconda/pkgs/main
referencing 0.30.2 pypi_0 pypi
requests 2.31.0 pypi_0 pypi
requests-oauthlib 1.3.1 pypi_0 pypi
rfc3339-validator 0.1.4 pypi_0 pypi
rfc3986-validator 0.1.1 pypi_0 pypi
rpds-py 0.10.6 pypi_0 pypi
rsa 4.9 pypi_0 pypi
safetensors 0.4.0 pypi_0 pypi
scikit-image 0.19.3 pypi_0 pypi
scikit-learn 1.1.3 pypi_0 pypi
scipy 1.9.3 pypi_0 pypi
send2trash 1.8.2 pypi_0 pypi
setuptools 68.0.0 py38h06a4308_0 https://mirrors.ustc.edu.cn/anaconda/pkgs/main
shapely 1.8.5.post1 pypi_0 pypi
six 1.16.0 pypi_0 pypi
sniffio 1.3.0 pypi_0 pypi
soupsieve 2.5 pypi_0 pypi
sqlite 3.41.2 h5eee18b_0 https://mirrors.ustc.edu.cn/anaconda/pkgs/main
stack-data 0.6.3 pypi_0 pypi
tenacity 8.2.3 pypi_0 pypi
tensorboard 2.14.1 pypi_0 pypi
tensorboard-data-server 0.7.1 pypi_0 pypi
termcolor 2.3.0 pypi_0 pypi
terminado 0.17.1 pypi_0 pypi
terminaltables 3.1.10 pypi_0 pypi
threadpoolctl 3.2.0 pypi_0 pypi
tifffile 2023.7.10 pypi_0 pypi
timm 0.9.7 pypi_0 pypi
tinycss2 1.2.1 pypi_0 pypi
tk 8.6.12 h1ccaba5_0 https://mirrors.ustc.edu.cn/anaconda/pkgs/main
tomli 2.0.1 pypi_0 pypi
torch 1.8.0+cu111 pypi_0 pypi
torchaudio 0.8.0 pypi_0 pypi
torchvision 0.9.0+cu111 pypi_0 pypi
tornado 6.3.3 pypi_0 pypi
tqdm 4.66.1 pypi_0 pypi
traitlets 5.11.2 pypi_0 pypi
types-python-dateutil 2.8.19.14 pypi_0 pypi
typing-extensions 4.8.0 pypi_0 pypi
uri-template 1.3.0 pypi_0 pypi
urllib3 2.0.6 pypi_0 pypi
wcwidth 0.2.8 pypi_0 pypi
webcolors 1.13 pypi_0 pypi
webencodings 0.5.1 pypi_0 pypi
websocket-client 1.6.4 pypi_0 pypi
werkzeug 3.0.0 pypi_0 pypi
wheel 0.41.2 py38h06a4308_0 https://mirrors.ustc.edu.cn/anaconda/pkgs/main
widgetsnbextension 4.0.9 pypi_0 pypi
xz 5.4.2 h5eee18b_0 https://mirrors.ustc.edu.cn/anaconda/pkgs/main
yapf 0.32.0 pypi_0 pypi
zipp 3.17.0 pypi_0 pypi
zlib 1.2.13 h5eee18b_0 https://mirrors.ustc.edu.cn/anaconda/pkgs/main
最重要的是这三个:

mmcv-full一定要下载好与环境对应的版本,不然会影响编译,出奇怪的环境错误
提供我用的mmcv-full地址mmcv-full 1.4.0 cuda11 torch1.8.0版本
下好后直接pip安装这个压缩包(mmcv-full 1.4.0 安装好了)
其他的可以按照如上先pip install 下好,以免编译过程系统找这些包超时,也可直接编译,报一个不匹配装一个
然后 cd mmdetection-2.11.0,依次执行
pip install -r requirements/build.txt
pip install -v -e . # or "python setup.py develop"
(mmdet 2.11.0 编译完毕)
编译最好执行这个命令:python setup.py develop
mmdetection3d没必要按他说的重新下载,整个文件夹就相当是,所以直接回到上级目录,执行 python setup.py develop(mmdet3d 0.11.0 编译完毕)
data文件直接在BEVFusion下创建,并把下载好的nuscenes解压放好,包括测试集解压后470多g
执行
python tools/create_data.py nuscenes --root-path ./data/nuscenes --out-dir ./data/nuscenes --extra-tag nuscenes处理数据,要点时间
# training example for bevfusion-pointpillar
# train nuimage for camera stream backbone and neck.
./tools/dist_train.sh configs/bevfusion/cam_stream/mask_rcnn_dbswin-t_fpn_3x_nuim_cocopre.py 8
# first train camera stream
./tools/dist_train.sh configs/bevfusion/cam_stream/bevf_pp_4x8_2x_nusc_cam.py 8
# then train LiDAR stream
./tools/dist_train.sh configs/bevfusion/lidar_stream/hv_pointpillars_secfpn_sbn-all_4x8_2x_nus-3d.py 8
# then train BEVFusion
./tools/dist_train.sh configs/bevfusion/bevf_pp_2x8_1x_nusc.py 8
8是gpu数,按卡数改
执行训练,第一条nuimage的训练可以忽略,直接git上下载模型放好,后面三条语句依次执行就行,官方要求3090*8,自己没这么多卡,就两张,把batchsize调为1勉强能跑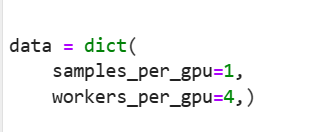
相关文章:
【论文阅读】以及部署BEVFusion: A Simple and Robust LiDAR-Camera Fusion Framework
BEVFusion: A Simple and Robust LiDAR-Camera Fusion Framework BEVFusion:一个简单而强大的LiDAR-相机融合框架 NeurIPS 2022 多模态传感器融合意味着信息互补、稳定,是自动驾驶感知的重要一环,本文注重工业落地,实际应用 融…...
N——>BatchSize 数据维度理解和处理(chun, cat, squeeze, unsqueeze)
数据处理之N——>BatchSize N——>batch_size train_data TensorDataset(torch.Tensor(x_train).double(), torch.Tensor(y_train).double()) train_loader DataLoader(train_data, batch_sizeargs.bs, shuffleTrue, drop_lastTrue) for batch_idx, (inputs, results…...

【编解码格式】AV1
AV1 AOMedia Video 1(简称AV1)是一个开放、免专利的视频编码格式,专为通过网络进行流传输而设计。它由开放媒体联盟(AOMedia)开发,目标是取代其前身VP9[2],该联盟由半导体企业、视频点播供应商…...
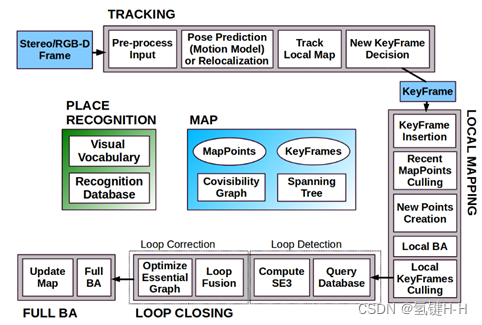
SLAM ORB-SLAM2(6)系统对象
SLAM ORB-SLAM2(6)系统对象 1. 封装2. 成员变量2.1. 核心数据2.2. 三个对象2.3. 三个线程2.4. 跟踪状态3. 成员函数4. 构造函数5. 数据驱动接口1. 封装 在 《SLAM ORB-SLAM2(5)例程了解》 了解到创建了一个 ORB_SLAM2::System 类型的对象 然后不断的把数据供给该对象就可以…...
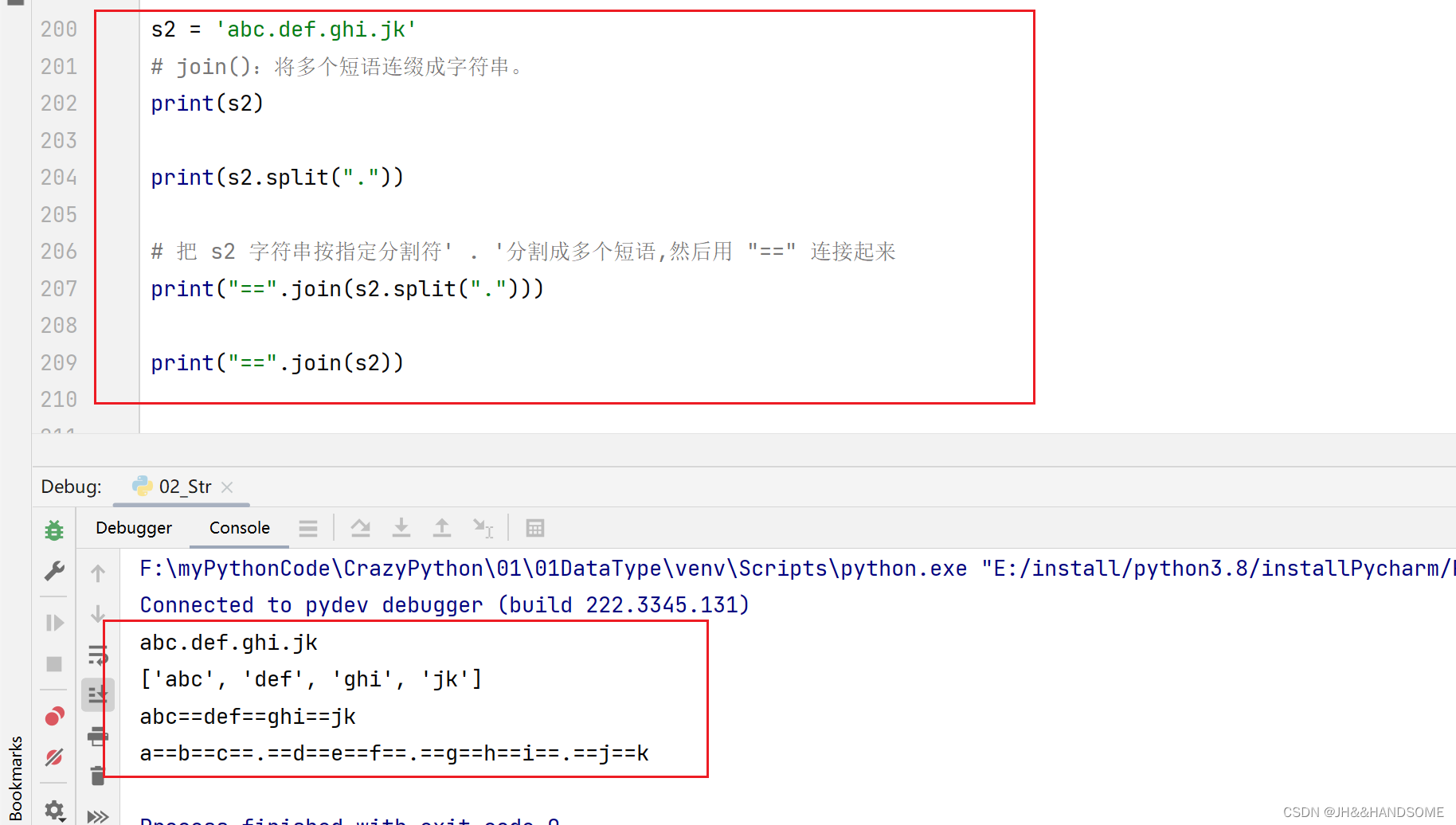
03、Python 字符串高级用法
目录 Python 字符串高级用法转义字符字符串格式化序列相关的方法大小写相关的方法dir 可以查看某个类的所有方法删除空白查找、替换相关方法 Python 字符串高级用法 转义字符 字符串格式化 序列相关的方法 字符串本质就是由多个字符组成,字符串的本质就是不可变序…...

armbian安装gcc、g++
文章目录 安装GCC安装G 安装GCC 打开终端,更新软件包列表: sudo apt update安装GCC: sudo apt install gcc如果需要安装特定版本的GCC,可以使用以下命令: sudo apt install gcc-<version> # sudo apt install g…...
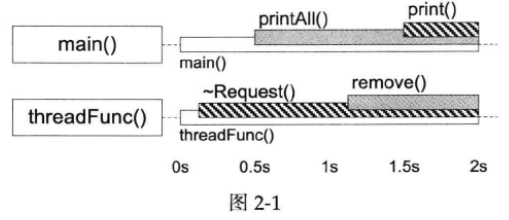
Linux多线程服务端编程:使用muduo C++网络库 学习笔记 第二章 线程同步精要
并发编程有两种基本模型,一种是message passing,另一种是shared memory。在分布式系统中,运行在多台机器上的多个进程的并行编程只有一种实用模型:message passing。在单机上,我们也可以照搬message passing作为多个进…...
中间件安全-CVE复现WeblogicJenkinsGlassFish漏洞复现
目录 服务攻防-中间件安全&CVE复现&Weblogic&Jenkins&GlassFish漏洞复现中间件-Weblogic安全问题漏洞复现CVE_2017_3506漏洞复现 中间件-JBoos安全问题漏洞复现CVE-2017-12149漏洞复现CVE-2017-7504漏洞复现 中间件-Jenkins安全问题漏洞复现CVE-2017-1000353漏…...

辅助驾驶功能开发-功能规范篇(16)-2-领航辅助系统NAP-HMI人机交互
书接上回 2.3.7HMI人机交互 2.3.7.1显示 (1)图标 序号 图标状态 (图形、颜色供参考) 含义说明 备注 1 辅助驾驶功能READY (允许激活) 2 辅助驾驶功能激活 3 辅助驾驶系统故障 4...
[计算机入门] 应用软件介绍(娱乐类)
3.21 应用软件介绍(娱乐类) 3.21.1 音乐:酷狗 音乐软件是一类可以帮助人们播放、管理和发现音乐的应用程序。它们提供了丰富的音乐内容,用户可以通过搜索、分类浏览或个性化推荐等方式找到自己喜欢的歌曲、专辑或艺术家。音乐软件还通常支持创建和管理…...
SL8541 android系统环境+编译
1.Ubuntu系统的安装 最好使用ubuntu18.0.4 2.工具环境包的安装 // 安装Android8.1源码编译环境 sudo apt-get install openjdk-8-jdk --------------ok sudo apt-get install libx11-dev:i386 libreadline6-dev:i386 libgl1-mesa-dev g-multilib --------------ok sudo…...

【苍穹外卖 | 项目日记】第八天
前言: 昨天晚上跑完步回来宿舍都快停电了,就没写项目日记,今天补上 目录 前言: 今日完结任务: 今日收获: 引入百度地图接口: 引入spring task ,定时处理异常订单: …...
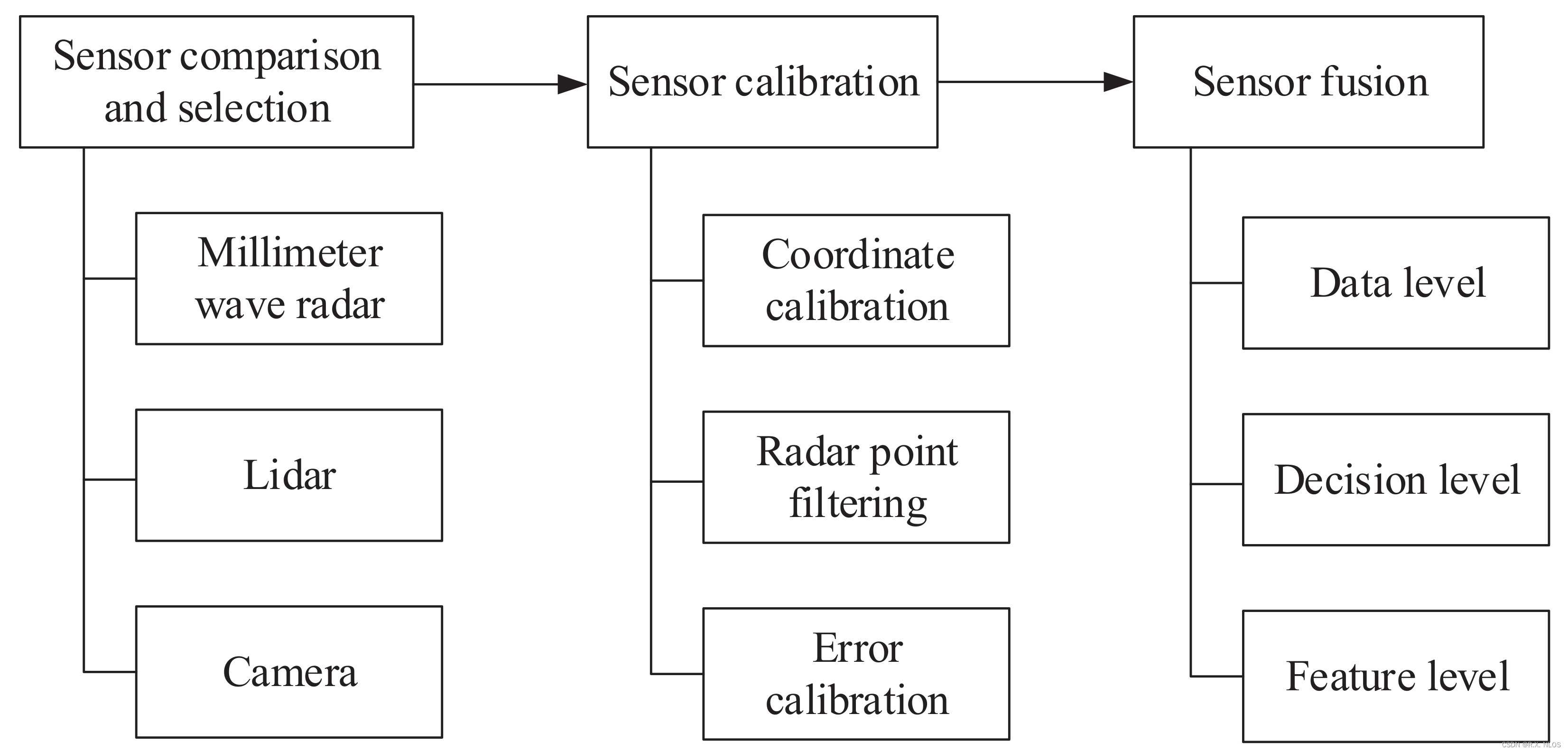
概念解析 | 毫米波雷达与计算机视觉的融合
注1:本文系“概念解析”系列之一,致力于简洁清晰地解释、辨析复杂而专业的概念。本次辨析的概念是:毫米波雷达与计算机视觉的融合。 毫米波雷达与计算机视觉的融合 Sensors | Free Full-Text | MmWave Radar and Vision Fusion for Object Detection in Autonomous Driving: A …...
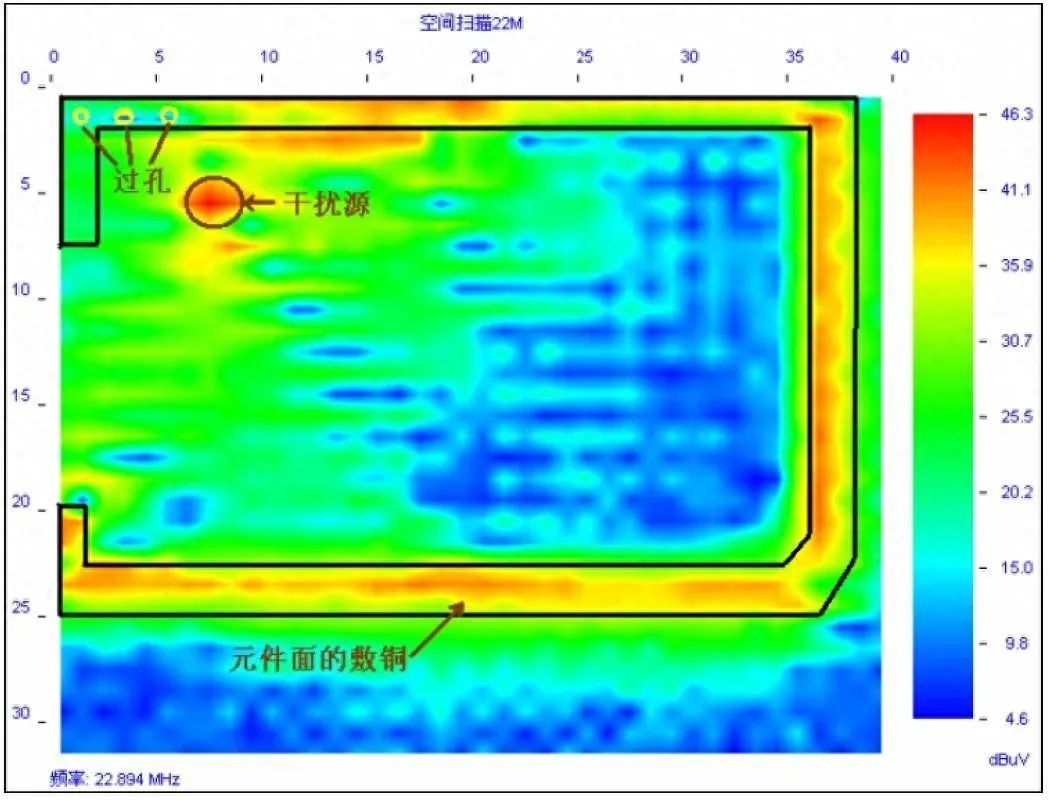
嵌入式硬件中常见的100种硬件选型方式
1请列举您知道的电阻、电容、电感品牌(最好包括国内、国外品牌)。 电阻: 美国:AVX、VISHAY 威世 日本:KOA 兴亚、Kyocera 京瓷、muRata 村田、Panasonic 松下、ROHM 罗姆、susumu、TDK 台湾:LIZ 丽智、PHY…...
Kubernetes 通过 Deployment 部署Jupyterlab
概要 在Kubernetes上部署jupyterlab服务,链接Kubernetes集群内的MySQL,实现简单的数据开发功能。 前置条件 镜像准备:自定义Docker镜像--Jupyterlab-CSDN博客 MySQL-Statefulset准备:StatefulSet 简单实践 Kubernetes-CSDN博客…...

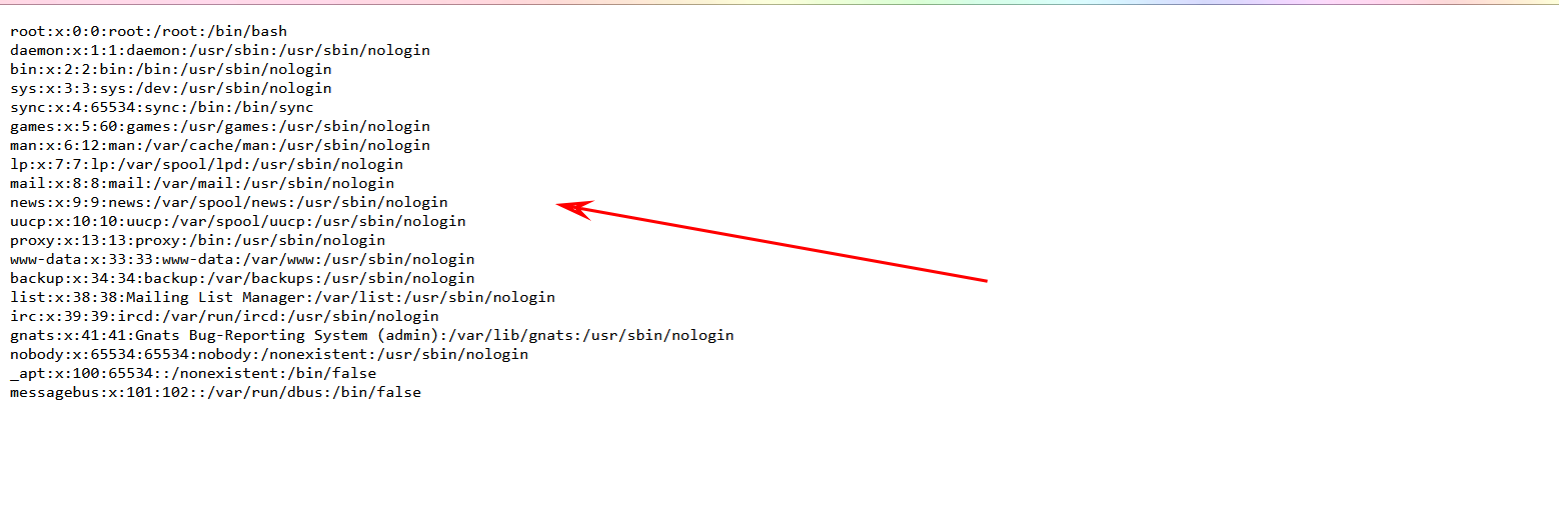
【Linux常用命令15】shell脚本
shell概述:shell是一个命令行解释器,它接收应用程序或用户的命令,然后调用操作系统内核 Linux Shell 种类非常多, 常见的有: Bourne Shell (/usr/bin/sh 或/bin/sh)、 Bourne Again Shell (/bin/bash)、 C Shell (/us…...

LTE系统TDD无线帧结构特点
LTE系统TDD无线帧结构的特点主要表现在以下几个方面: 无线帧结构时间描述的最小单位是采样周期Ts。在LTE中,每个子载波为2048阶IFFT采样,△f15kHz,因此采样周期Ts1/(204815000)0.033us。 TDD的帧结构包括两个5ms的半帧࿰…...

微信小程序OA会议系统数据交互
前言 经过我们所写的上一文章:微信小程序会议OA系统其他页面-CSDN博客 在我们的是基础面板上面,可以看到出来我们的数据是死数据,今天我们就完善我们的是数据 后台 在我们去完成项目之前我们要把我们的项目后台准备好资源我放在我资源中&…...

TypeScript环境安装
一、windows环境 安装node,附带自动安装npm工具 安装tsc npm install -g typescript 对于不支持 Nuget 的项目类型,你可以使用 TypeScript Visual Studio 扩展。 你可以使用 Visual Studio 中的 Extensions > Manage Extensions 安装扩展。 安装下…...

连接Mumu模拟器使用ADB
要连接Mumu模拟器使用ADB,您可以按照以下详细步骤进行操作: 安装ADB驱动程序:在您的计算机上安装ADB驱动程序。ADB是Android Debug Bridge的缩写,它允许您与Android设备进行通信。您可以从Android开发者网站(https://d…...

Horos:当医疗影像分析从专业壁垒变为日常工具
Horos:当医疗影像分析从专业壁垒变为日常工具 【免费下载链接】horos Horos™ is a free, open source medical image viewer. The goal of the Horos Project is to develop a fully functional, 64-bit medical image viewer for OS X. Horos is based upon Osiri…...

TPFanCtrl2终极指南:ThinkPad风扇控制完全手册,打造静音高效的散热系统
TPFanCtrl2终极指南:ThinkPad风扇控制完全手册,打造静音高效的散热系统 【免费下载链接】TPFanCtrl2 ThinkPad Fan Control 2 (Dual Fan) for Windows 10 and 11 项目地址: https://gitcode.com/gh_mirrors/tp/TPFanCtrl2 作为ThinkPad用户&#…...

ComfyUI极速上手指南:零基础搭建高效AI绘图工作流
1. ComfyUI初印象:为什么选择这个AI绘图神器 第一次接触ComfyUI时,我完全被它独特的节点式操作方式吸引了。与常见的WebUI不同,ComfyUI把整个AI绘图过程拆解成一个个可视化模块,就像搭积木一样自由组合。这种设计理念让创作过程变…...

三月七小助手:5步掌握崩坏星穹铁道全自动游戏助手终极指南
三月七小助手:5步掌握崩坏星穹铁道全自动游戏助手终极指南 【免费下载链接】March7thAssistant 崩坏:星穹铁道全自动 三月七小助手 项目地址: https://gitcode.com/gh_mirrors/ma/March7thAssistant 你是否厌倦了每天重复的清体力、做日常、领奖励…...

RT-DETR实战入门:从零搭建PyTorch训练环境与数据准备
1. RT-DETR简介与环境配置 RT-DETR是百度最新推出的实时目标检测模型,基于Transformer架构设计,在速度和精度上都有不错的表现。相比传统的YOLO系列,RT-DETR采用了更先进的注意力机制,能够更好地处理复杂场景中的目标检测任务。对…...
)
【数据爬取】国家知识产权局专利统计数据的自动化收集与整理(request+lxml+selenium实战)
1. 为什么需要自动化收集专利数据 做数据分析的朋友们应该都深有体会,最头疼的不是写代码分析数据,而是前期收集整理数据的过程。就拿专利数据来说,每次手动下载几十个Excel表格,再一个个整理合并,这种重复劳动不仅效率…...

3步永久备份微信聊天记录:开源工具WeChatExporter深度指南
3步永久备份微信聊天记录:开源工具WeChatExporter深度指南 【免费下载链接】WeChatExporter 一个可以快速导出、查看你的微信聊天记录的工具 项目地址: https://gitcode.com/gh_mirrors/wec/WeChatExporter 你是否曾因更换手机而丢失珍贵的聊天记录ÿ…...

AIAgent能支撑AGI吗?SITS2026圆桌激辩实录:8大底层能力缺口与2026年前必须攻克的3座技术高峰
第一章:SITS2026圆桌:AIAgent与AGI的关系 2026奇点智能技术大会(https://ml-summit.org) AIAgent 与 AGI 并非线性演进关系,而是认知架构、目标建模与自主演化能力的质变交界。在 SITS2026 圆桌讨论中,多位前沿研究者指出&#…...

SolidWorks三维设计上云指南:制造企业如何用1台云主机实现10人高效协同?
随着云计算技术的成熟,SolidWorks云主机凭借其显著优势,为制造企业提供了全新的解决方案。通过将SolidWorks部署至云端,企业可突破本地硬件限制,实现“一台云主机支持多人协同设计”的轻量化运营模式。这一模式不仅降低了IT投入与…...

Qwen3-Reranker-0.6B完整指南:支持多租户隔离的API网关集成方案
Qwen3-Reranker-0.6B完整指南:支持多租户隔离的API网关集成方案 1. 为什么你需要Qwen3-Reranker-0.6B 在构建现代搜索、推荐或RAG(检索增强生成)系统时,排序环节往往决定最终体验的上限。你可能已经部署了高效的向量检索服务&am…...