单目3D目标检测[基于深度辅助篇]
基于深度辅助的方法
1. Pseudo-LiDAR
- Pseudo-LiDAR from Visual Depth Estimation: Bridging the Gap in 3D Object Detection for Autonomous Driving
- 康奈尔大学
- https://zhuanlan.zhihu.com/p/52803631

- 首先利用DRON或PSMNET从单目 (Monocular)或双目 (Stereo)图像获取对应的深度图像(depth map),然后将原图像结合深度信息得到伪雷达点云 (pseudo-LiDAR),最后用pseudo-LiDAR代替原始雷达点云,以3D point cloud和bird’s eye view的形式
- 图像对physically incoheren不友好;深度图对不同尺寸物体检测不友好:所以用伪点云
- pseudo-Lidar > FV+depth map
- 1.Image-based 3D Perception方案较差的性能:主要是由于front view这种2D图形表示,而不是之前一直纠结的不准确的depth map
- 2.雷达的优势:在三维点云中(或BEV), 卷积和池化操作的区域都是physical nearby, 不同位置的不同物体并不会混为一谈;其次,物体的尺度具备深度不变性,保持了三维空间中最原始的尺度。
- 未来工作:融合LiDAR 和 pseudo-LiDAR可能更好
- 雷达点云虽然精确并有反射强度信息,但是非常稀疏
- pseudo-LiDAR虽然不是特别精确,但是比雷达点云要密集的多,且具备RGB颜色信息
- 比传统融合Lidar和RGB(MV3D, AVOD)更好
2. PatchNet
-
Rethinking Pseudo-LiDAR Representation
-
商汤 ECCV2020
-
https://github.com/xinzhuma/patchnet.git
-
https://arxiv.org/pdf/2008.04582.pdf
-
https://blog.csdn.net/qq_16137569/article/details/123769737
-
PatchNet-vanilla
- Step1:深度估计 给定一张单目图像或双目图像对,使用独立的模型预测每个像素( u , v ) (u,v)(u,v)对应的深度值d dd。
- Step2:2D检测 使用另一个CNN生成2D目标的区域提议。
- Step3:3D数据生成 根据Step2生成的区域提议将感兴趣区域从Step1生成的深度图中抠下来,然后利用相机内参将深度值转化为3D世界坐标( x , y , z ) (x,y,z)(x,y,z)。
- Step4:3D目标检测 将Step3生成的伪点云视为激光信号,并使用PointNet预测结果。PointNet将点云视为无序点集,并通过一个集合函数f ff将点集映射到输出向量
-
PatchNet-vanilla
- 前三步和pseudo-LiDAR完全一样,第四步会有所差别。PatchNet-vanilla将M个3D点重构成N×N×3的图像块,作为PatchNet-vanilla的输入,然后可以使用一个1 × 1 1\times 11×1接收域的2D卷积层以及一个全局最大池化来实现

- 前三步和pseudo-LiDAR完全一样,第四步会有所差别。PatchNet-vanilla将M个3D点重构成N×N×3的图像块,作为PatchNet-vanilla的输入,然后可以使用一个1 × 1 1\times 11×1接收域的2D卷积层以及一个全局最大池化来实现
-
PatchNet-vanilla获得了和pseudo-LiDAR几乎一样的性能,这也证明了伪点云的数据表征形式不是必要的。
-
PatchNet-vanilla和PatchNet-AM3D,可以看到两种方法在替换数据表征方式后的性能都基本持平。说明数据表征不是影响3D检测性能的关键因素。
-
PatchNet:
- 首先训练两个CNN分别用于预测2D框和深度图,对于每个检测到的2D目标框,从深度图中抠出对应的区域,利用相机内参将深度值转换成3D空间坐标(得到Fig.3中的cropped patches)。紧接着用一个主干CNN提取这些ROI的深层特征,然后使用mask global pooling分离出前景目标特征,最后通过一个检测头来进行回归目标的3D框(x ,y ,z ,h ,w ,l ,θ )
- mask global pooling是论文提出了一种增强版global pooling方式,利用一个二值掩模(通过卡阈值的方式从深度图中获得)只对前景目标的特征进行global pooling操作,以获得更加鲁棒的特征。
3. MonoRCNN
4. D4LCN
5. CaDDN
6. DD3D

- DD3D
a. 对于DD3D,以DLA-34作为backbone,按照论文中提出的实验流程训练(coco pretrain->DDAD15M pretrain->3D detection),在KITTI-3D验证集上测试得到的Car-BEV-AP分别是33.5(Easy),26.0(Mod),22.6(Hard) - PL
a. DDAD15M pretrain->KITTI-Depth finetune->pseudo-lidar based 3D detection)
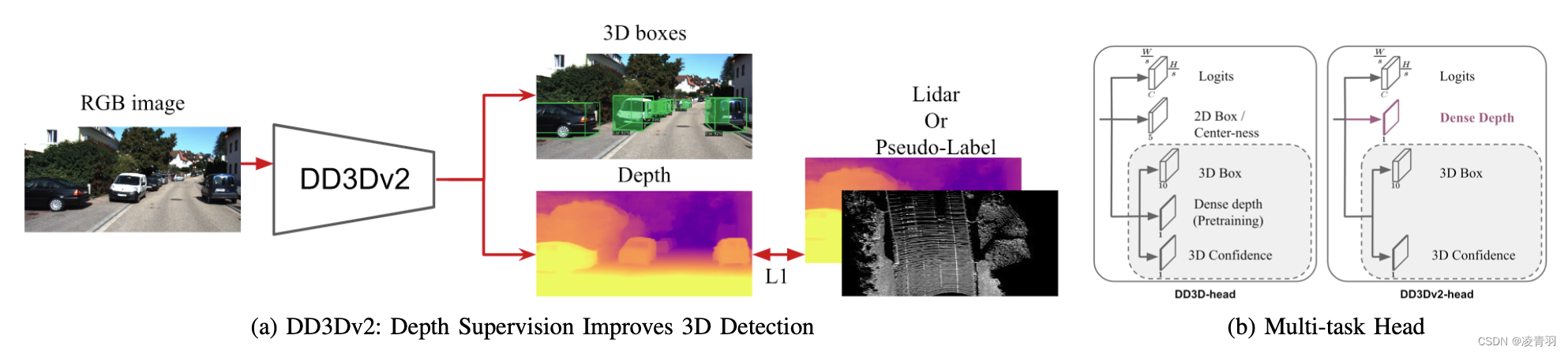
7. DD3Dv2
相关文章:
单目3D目标检测[基于深度辅助篇]
基于深度辅助的方法 1. Pseudo-LiDAR Pseudo-LiDAR from Visual Depth Estimation: Bridging the Gap in 3D Object Detection for Autonomous Driving康奈尔大学https://zhuanlan.zhihu.com/p/52803631 首先利用DRON或PSMNET从单目 (Monocular)或双目 (Stereo)图像获取对应的…...
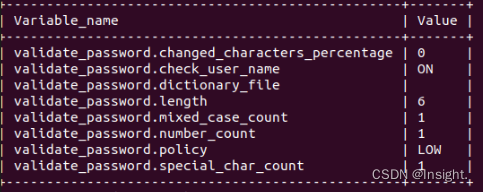
Ubuntu20.04下安装MySQL8环境
Ubuntu20.04下安装MySQL8环境 1.下载MySQL客户端和服务器2.配置MySQL3.测试MySQL4.设置MySQL服务开机自启动5.修改root密码MySQL数据库基本使用启动MySQL数据库服务重启MySQL数据库服务停止MySQL数据库服务查看MySQL运行状态设置MySQL服务开机自启动停止MySQL服务开机自启动MyS…...

html鼠标悬停图片放大
要在HTML中实现鼠标悬停时图片放大的效果,你可以使用CSS和JavaScript来完成。下面是一个简单的示例: 首先,创建一个HTML文档,包含一张图片和相应的CSS和JavaScript代码。 <!DOCTYPE html> <html lang"en">…...

基于hugging face的autogptq量化实践
1.量化并保存到本地的 #导入库: from transformers import AutoModelForCausalLM, AutoTokenizer, GPTQConfig model_id "facebook/opt-125m"quantization_config GPTQConfig(bits4,group_size128,dataset"c4",desc_actFalse, )tokenizer A…...

MySQL2:MySQL中一条查询SQL是如何执行的?
MySQL2:MySQL中一条查询SQL是如何执行的? MySQL中一条查询SQL是如何执行的?1.连接怎么查看MySQL当前有多少个连接?思考:为什么连接数是查看线程?客户端的连接和服务端的线程有什么关系?MySQL参数…...
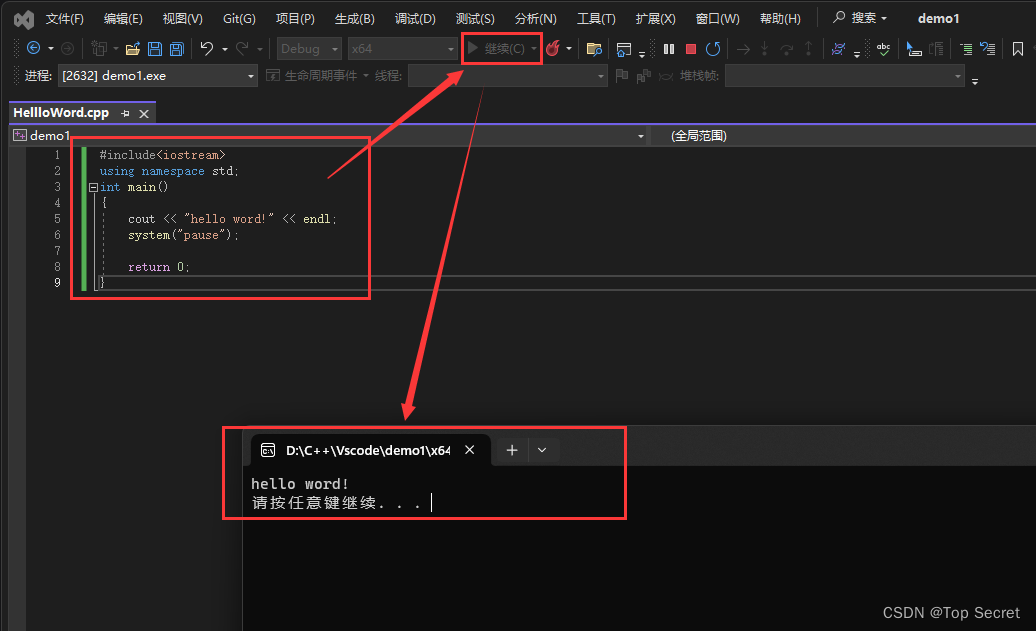
C++入门01—从hello word!开始
1.第一个C程序 1.1 创建项目 第一次使用Visual Studio时: 1.2 创建文件 1.3 编写代码 编写第一个代码: #include<iostream> using namespace std; int main() {cout << "hello word!" << endl;system("pause"…...
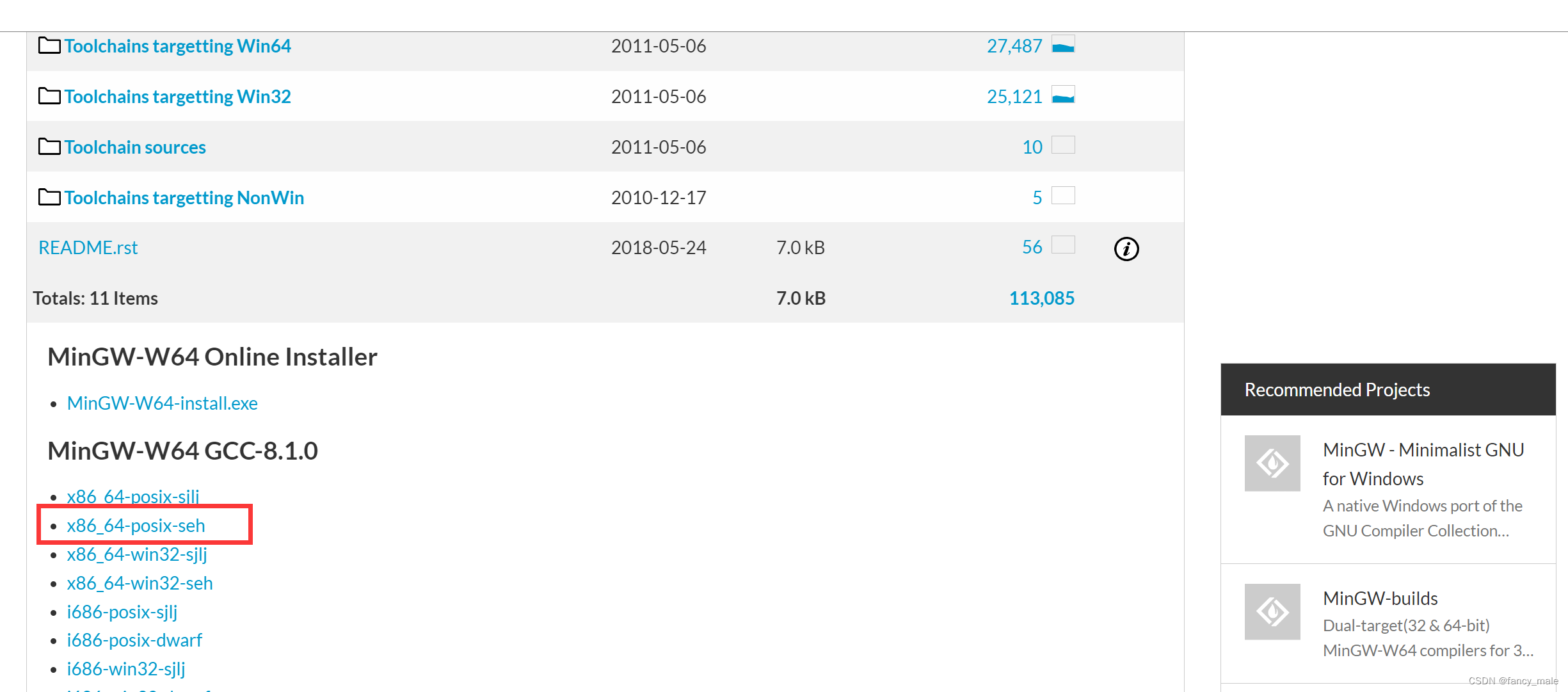
Mingw下载---运行vscodeC++文件
下载 下载网址: https://sourceforge.net/projects/mingw-w64/files/mingw-w64/mingw-w64-release/ 翻到最下面,选择win64的安装: 下载完,解压到没有空格和中文字符的路径。不然在vscode中运行不了C代码。...

数据安全与PostgreSQL:最佳保护策略
在当今数字化时代,数据安全成为了企业不可或缺的一环。特别是对于使用数据库管理系统(DBMS)的组织来说,确保数据的完整性、保密性和可用性至关重要。在众多DBMS中,PostgreSQL作为一个强大而灵活的开源数据库系统&#…...
火山引擎实时、低延时拥塞控制算法的优化实践
摘要 火山引擎智能拥塞控制算法 VICC(Volcano Intelligent Congestion Control)是一种自适应的拥塞控制算法,旨在解决全球不同网络环境下,不同音视频应用对带宽利用率和延时的差异化要求。它结合了传统拥塞控制算法(如…...

adb设备调试常用命令
自从工作越来越忙后,越来越懒得写文章了,趁着1024程序员节,仪式性地写篇文章,分享一下最近调试设备经常用到的adb指令~ 1.查看应用内存占用 1.1 dumpsys meminfo package dumpsys是查看系统服务信息的一个常用指令,可…...

ubuntu下Docker的简单使用并利用主机显示
首先分享一个docker镜像的网站:https://hub.docker.com/search?q 这个网站里面有很多配置好的镜像,可以直接拉取。 下面介绍一下docker的安装和使用。 1、docker得到安装: sudo apt-get install docker 2、docker拉取一个镜像到本地,这里我…...
第12章 PyTorch图像分割代码框架-1
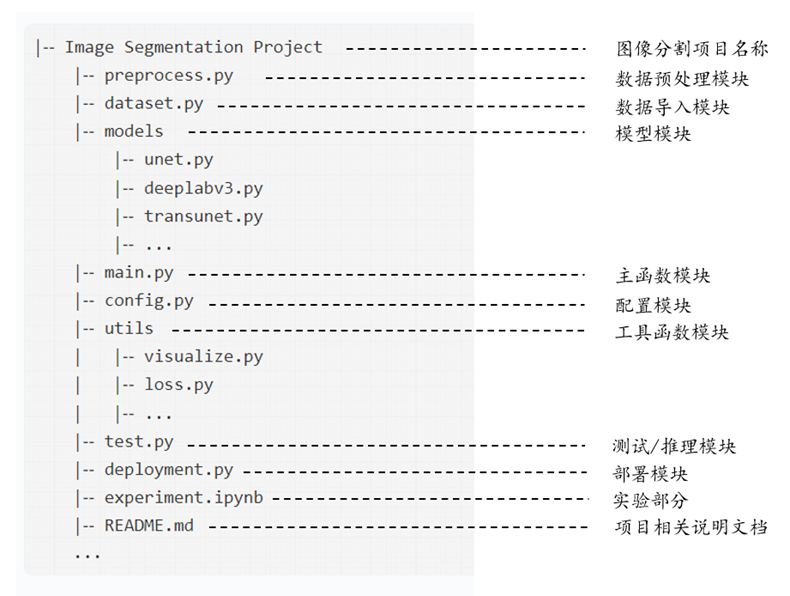
从本章开始,本书将会进行深度学习图像分割的实战阶段。PyTorch作为目前最为流行的一款深度学习计算框架,在计算机视觉和图像分割任务中已经广泛使用。本章将介绍基于PyTorch的深度学习图像分割代码框架,在总体框架的基础上,基于PA…...

2023CSPJ 旅游巴士 —— dijkstra
This way 题意: 给你一个有向图,1号点为起点,n为终点。你可以在k的倍数的时间点在起点开始,每条边的边长为1,同时,每条边有一个限定时间ai,表示你必须在大于等于ai的时间点才能走这条边。 …...
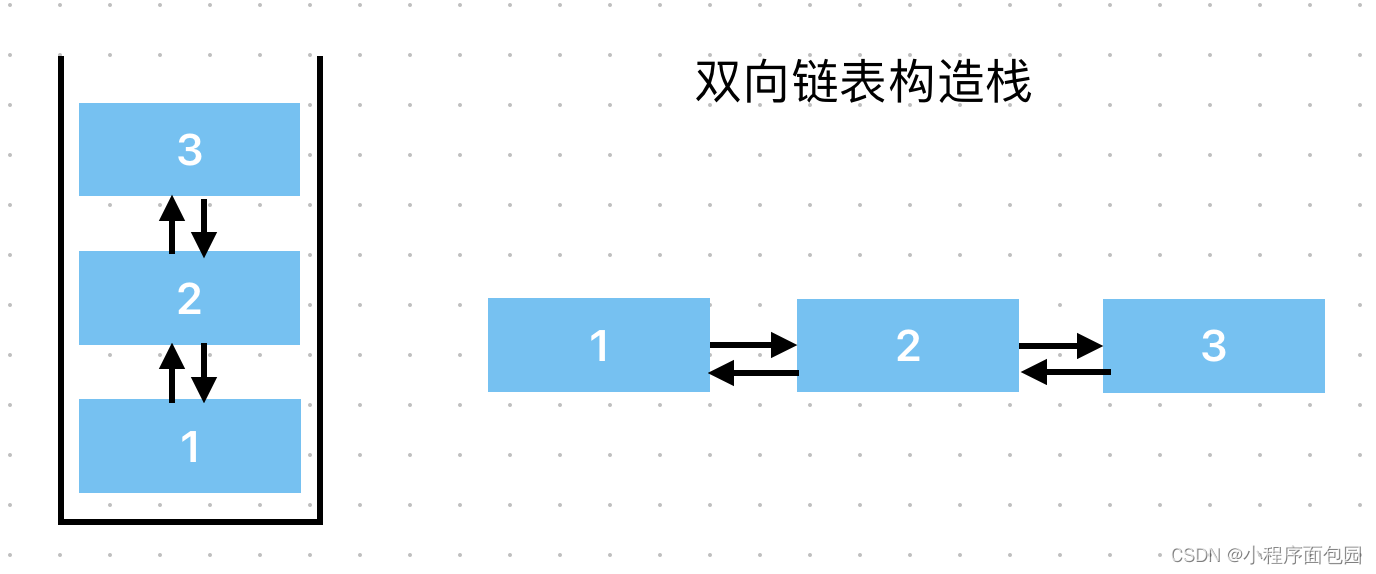
数据结构之栈的讲解(源代码+图解+习题)
我们在学习过顺序表和链表之后,了解了使用数组存储数据,使用结构体来存储数据和有关的指针,这些都是底层的东西,链表是靠指针的链接,顺序表是靠数组的下标才能得以实现增删查改。众多数据结构其实底层都离不开数组&…...
内网渗透-内网信息收集
内网信息收集 前言 当我们进行外网信息收集,漏洞探测以及漏洞利用后,获得了主机的权限后,我们需要扩大渗透的战果时,这是我们就要进行内网的渗透了,内网渗透最重要的还是前期的信息收集的操作了,就是我们的…...

LeetCode解法汇总2520. 统计能整除数字的位数
目录链接: 力扣编程题-解法汇总_分享记录-CSDN博客 GitHub同步刷题项目: https://github.com/September26/java-algorithms 原题链接:力扣(LeetCode)官网 - 全球极客挚爱的技术成长平台 描述: 给你一个整…...

Lua语言编写爬虫程序
以下是一个使用luasocket-http库和Lua语言编写的爬虫程序。此程序使用了https://www.duoip.cn/get_proxy的代码。 -- 引入所需的库 local http require("socket.http") local ltn12 require("ltn12") local json require("json") -- 获取…...

安防监控项目---概要
文章目录 前言一、项目需求二、环境介绍三、关键点四、主框架分析总结 前言 各位小伙伴,在蛰伏了将近有半年的时间又要和大家分享新的知识了,这次和大家分享的是一个项目,因此呢我准备分项目阶段去和大家分享,希望大家都能够在每…...

数仓经典面试题
1.什么是数据仓库?请谈谈你对数据仓库的理解。 数据仓库是一个用于存储和管理数据的系统,它可以将分散的、异构的数据源中的数据进行抽取、转换、清洗和整合,然后按照一定的模型和架构进行组织和存储,以便更好地支持决策分析和业…...

【ARM Coresight 系列文章 15.2 – components power domain 详细介绍】
文章目录 1.1. Coresight 电源域模型1.1.1 CDBGPWRUPREQ 和 CDBGPWRUPACK1.1.2 CSYSPWRUPREQ 和 CSYSPWRUPACK1.1.3 Power Domain ID In RomTable1.1.4 Power domain entries1.1.5 Algorithm to discover power domain IDs1.1.6 Debug power requests1.1.7 System power reques…...

墙面涂料里的有害物质到底有哪些?
痛点深度剖析我们团队在实践中发现,当前室内墙面涂料市场存在诸多技术困境。很多消费者在使用传统墙面涂料后,会面临健康隐患。比如,涂料初期异味大,后期还会持续释放低剂量的 VOCs,像甲醛、苯系物等。家人长期处于这样…...

一文读懂水面无人艇:每个硬件模块到底负责什么
目录 一、水面无人艇完整系统 二、硬件搭配负责哪些功能 2.1 艇体模块:决定“能不能稳、能不能装、能不能扛风浪” 2.2 动力与航行执行模块:决定“怎么动” 2.3 导航传感器模块:决定“我现在在哪、朝哪、跑多快” 1)GPS / 北…...

Ryujinx零门槛全攻略:开源Switch模拟器从入门到精通
Ryujinx零门槛全攻略:开源Switch模拟器从入门到精通 【免费下载链接】Ryujinx 用 C# 编写的实验性 Nintendo Switch 模拟器 项目地址: https://gitcode.com/GitHub_Trending/ry/Ryujinx 价值定位:为什么Ryujinx能重新定义Switch游戏体验ÿ…...

实战避坑!从WMS视角看Android UI线程优化:为什么主线程耗时必掉帧?
从WMS到Choreographer:Android主线程耗时操作导致丢帧的底层原理与实战优化 当你在Android应用中滑动列表时突然出现卡顿,或是界面渲染出现明显延迟,这背后往往隐藏着主线程耗时操作与WMS(WindowManagerService)、Chor…...

Wan2.2-I2V-A14B与数据库联动:自动化生成电商商品动态详情页视频
Wan2.2-I2V-A14B与数据库联动:自动化生成电商商品动态详情页视频 1. 电商视频制作的痛点与机遇 电商平台每天都有大量新品上架,传统的商品详情页视频制作方式面临巨大挑战。一个中型电商平台每月可能新增上千款商品,如果每款商品都需要人工…...

MedGemma X-Ray 场景应用:基层医生的AI辅助阅片实战指南
MedGemma X-Ray 场景应用:基层医生的AI辅助阅片实战指南 1. 基层医疗的痛点与AI解决方案 在基层医疗机构,放射科医生常常面临两大挑战:一是阅片经验相对不足,二是工作负荷过重。一张胸部X光片可能包含数十个需要观察的关键点&am…...

EVA-01保姆级教程:Qwen2.5-VL-7B多模态大模型在EVA-01中的本地化安全部署
EVA-01保姆级教程:Qwen2.5-VL-7B多模态大模型在EVA-01中的本地化安全部署 1. 引言:欢迎来到NERV指挥中心 想象一下,你面前有一个能看懂图片、理解图表、甚至能和你讨论图片里发生了什么的智能助手。现在,我们把这个助手装进了一…...

Avalonia预览器罢工了?别慌,手把手教你排查和修复‘无法加载axaml预览’的坑
Avalonia预览器崩溃自救指南:从错误日志到配置优化的全链路解决方案 当你正沉浸在Avalonia跨平台UI开发的流畅体验中,突然发现预览窗口变成一片空白,右下角弹出"无法加载axaml预览"的红色警告——这种突如其来的开发中断࿰…...

CFO/SFO/STO/CFD/IQ不平衡/IQ gain mismatch/IQ phase mismatch/干扰信号载波频率 等等蓝牙通信中干扰参数解析
载波频偏和采样频偏确实来自物理上不同的时钟源,虽然它们可能在数字通信系统中相互影响。 我们可以从三个层面来理清它们的关系: 2. 为什么容易混淆 因为在实际电路中,射频本振和采样时钟可能来自同一个参考晶振。在一些低成本或集成度高的系统中,收发信机通过锁相环(PL…...
)
避免踩坑:Unity中Resources.LoadAll的正确使用姿势(含multiple模式Sprite处理)
Unity资源加载进阶:Resources.LoadAll与Sprite图集高效处理指南 在Unity开发中,资源加载是每个项目都无法绕开的核心环节。特别是当处理包含多张小图的Sprite图集时,很多开发者会陷入性能陷阱和功能误区。本文将深入剖析Resources.LoadAll的正…...