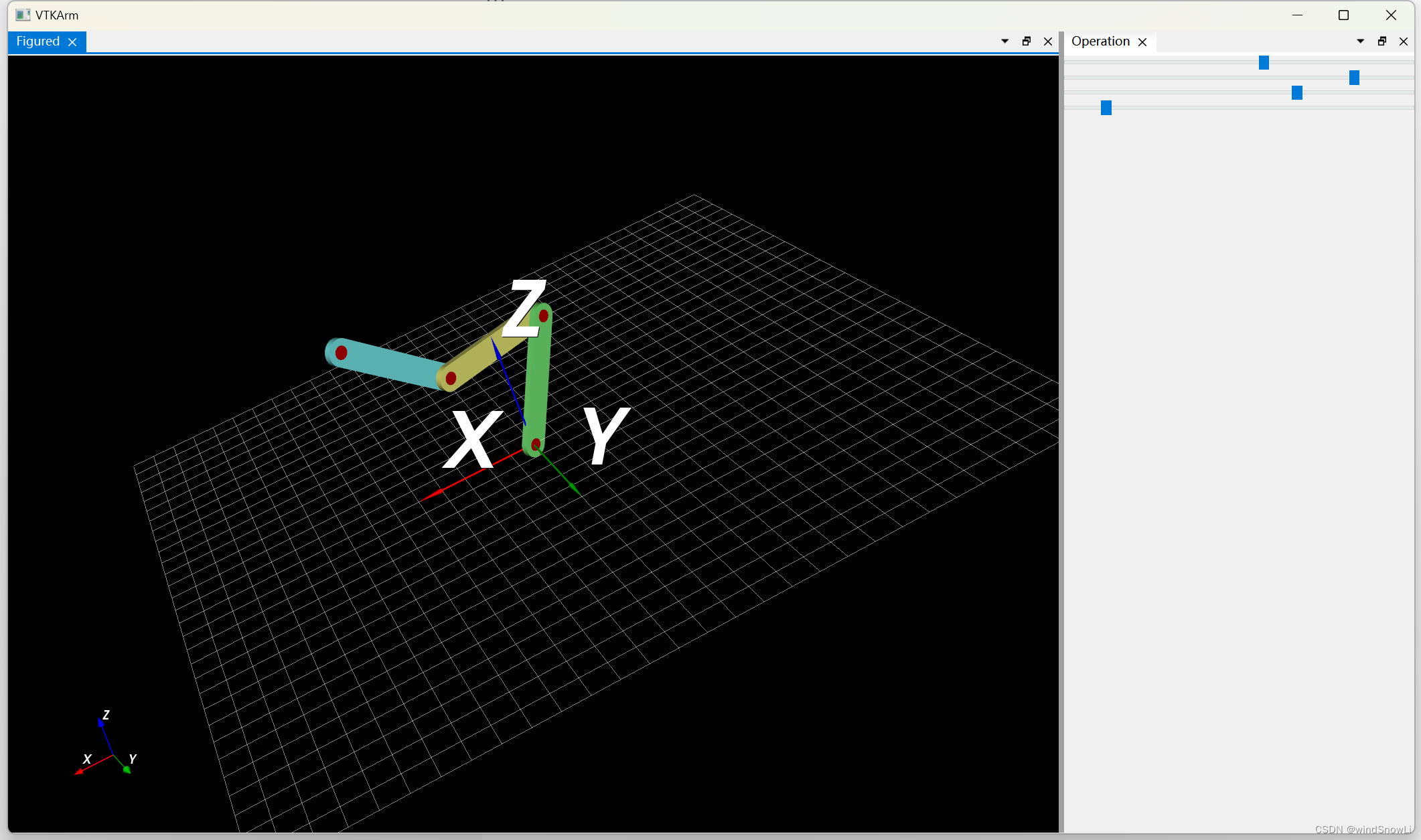
C++ Qt/VTK装配体组成联动连接杆
效果
关键代码
#include "View3D.h"
#include "Axis.h"#include <vtkActor.h>
#include <vtkAppendPolyData.h >
#include <vtkAreaPicker.h>
#include <vtkAxesActor.h>
#include <vtkBox.h>
#include <vtkCamera.h>
#include <vtkCaptionActor2D.h>
#include <vtkCellArray.h>
#include <vtkCleanPolyData.h >
#include <vtkContourFilter.h>
#include <vtkCubeSource.h>
#include <vtkCylinder.h>
#include <vtkCylinderSource.h>
#include <vtkDataSet.h>
#include <vtkGenericOpenGLRenderWindow.h>
#include <vtkImplicitBoolean.h>
#include <vtkInteractorStyleTrackballCamera.h>
#include <vtkLine.h>
#include <vtkMinimalStandardRandomSequence.h>
#include <vtkNamedColors.h>
#include <vtkObjectFactory.h>
#include <vtkOrientationMarkerWidget.h>
#include <vtkPlane.h>
#include <vtkPolyDataMapper.h>
#include <vtkPolyDataNormals.h>
#include <vtkPropPicker.h>
#include <vtkProperty.h>
#include <vtkRenderWindow.h>
#include <vtkRenderWindowInteractor.h>
#include <vtkRenderer.h>
#include <vtkRendererCollection.h>
#include <vtkReverseSense.h>
#include <vtkSTLReader.h>
#include <vtkSampleFunction.h>
#include <vtkSmartPointer.h>
#include <vtkSphere.h>
#include <vtkTransform.h>
#include <vtkTransformPolyDataFilter.h>// 主体为长方体,端部两个半圆,半圆的圆心是空洞
decltype(auto) View3D::buildBoard(double r, double g, double b)
{// 创建长方体vtkNew<vtkCubeSource> cube;// 长度1,宽度0.2,厚度0.05cube->SetXLength(1);cube->SetYLength(0.05);cube->SetZLength(0.2);cube->Update();// 创建半圆vtkNew<vtkCylinderSource> cy;// 半径0.1,高度0.05,圆心0.5,0,0cy->SetRadius(0.1);cy->SetHeight(0.05);cy->SetCenter(0.5, 0, 0);cy->SetResolution(100);cy->Update();// 创建独立的对称半圆vtkNew<vtkCylinderSource> cy1;// 半径0.1,高度0.05,圆心-0.5,0,0cy1->SetRadius(0.1);cy1->SetHeight(0.05);cy1->SetResolution(100);cy1->SetCenter(-0.5, 0, 0);cy1->Update();// 小圆柱vtkNew<vtkCylinderSource> cy2;cy2->SetRadius(0.05);cy2->SetHeight(0.06);cy2->SetResolution(100);cy2->SetCenter(0.5, 0, 0);cy2->Update();// 小圆柱vtkNew<vtkCylinderSource> cy3;cy3->SetRadius(0.05);cy3->SetHeight(0.06);cy3->SetResolution(100);cy3->SetCenter(-0.5, 0, 0);cy3->Update();// 创建长方体和半圆的合体vtkNew<vtkAssembly> assembly;// cube actorvtkNew<vtkPolyDataMapper> cudeMapper;cudeMapper->SetInputConnection(cube->GetOutputPort());vtkNew<vtkActor> cudeActor;cudeActor->SetMapper(cudeMapper);cudeActor->GetProperty()->SetColor(r, g, b);assembly->AddPart(cudeActor);vtkNew<vtkPolyDataMapper> cyMapper;cyMapper->SetInputConnection(cy->GetOutputPort());vtkNew<vtkActor> cyActor;cyActor->SetMapper(cyMapper);cyActor->GetProperty()->SetColor(r, g, b);assembly->AddPart(cyActor);vtkNew<vtkPolyDataMapper> cy1Mapper;cy1Mapper->SetInputConnection(cy1->GetOutputPort());vtkNew<vtkActor> cy1Actor;cy1Actor->SetMapper(cy1Mapper);cy1Actor->GetProperty()->SetColor(r, g, b);assembly->AddPart(cy1Actor);vtkNew<vtkPolyDataMapper> cy2Mapper;cy2Mapper->SetInputConnection(cy2->GetOutputPort());vtkNew<vtkActor> cy2Actor;cy2Actor->SetMapper(cy2Mapper);cy2Actor->GetProperty()->SetColor(0.8, 0, 0);assembly->AddPart(cy2Actor);vtkNew<vtkPolyDataMapper> cy3Mapper;cy3Mapper->SetInputConnection(cy3->GetOutputPort());vtkNew<vtkActor> cy3Actor;cy3Actor->SetMapper(cy3Mapper);cy3Actor->GetProperty()->SetColor(0.8, 0, 0);assembly->AddPart(cy3Actor);return assembly;
}decltype(auto) View3D::buildConnectRod()
{// 淡绿色auto actor1 = buildBoard(0.5, 1, 0.5);// 淡黄色auto actor2 = buildBoard(1, 1, 0.5);// 淡蓝色auto actor3 = buildBoard(0.5, 1, 1);// 平移actoractor1->AddPosition(0.5, 0, 0);actor2->AddPosition(1.5, 0.05, 0);actor3->AddPosition(2.5, 0.1, 0);vtkNew<vtkAssembly> assembly1, assembly2, assembly3;assembly1->AddPart(actor1);assembly1->AddPart(assembly2);assembly2->AddPart(actor2);assembly2->AddPart(assembly3);assembly3->AddPart(actor3);assembly2->SetOrigin(1, 0.05, 0);assembly3->SetOrigin(2, 0, 0);return std::make_tuple(vtkSmartPointer<vtkAssembly>(assembly1),vtkSmartPointer<vtkAssembly>(assembly2),vtkSmartPointer<vtkAssembly>(assembly3));
}View3D::View3D(QWidget* parent): QVTKOpenGLNativeWidget(parent)
{vtkNew<vtkRenderer> renderer;this->renderWindow()->AddRenderer(renderer);renderer->AddActor(baseAxes = getBaseAxes());addGuideLine(3, 0.2);connectRods = buildConnectRod();auto&& [actor1, actor2, actor3] = connectRods;renderer->AddActor(actor1);// 水平旋转renderer->GetActiveCamera()->Azimuth(90);renderer->GetActiveCamera()->SetRoll(-90);renderer->GetActiveCamera()->Azimuth(45);renderer->GetActiveCamera()->Elevation(15);renderer->GetActiveCamera()->SetPosition(3, 3, 1);vtkSmartPointer<vtkOrientationMarkerWidget> widget = vtkSmartPointer<vtkOrientationMarkerWidget>::New();;this->borderWidget = widget;vtkSmartPointer<vtkAxesActor> widgetAxesActor = vtkSmartPointer<vtkAxesActor>::New();widgetAxesActor->SetPosition(0, 0, 0);widgetAxesActor->SetShaftType(0);widgetAxesActor->SetCylinderRadius(0.02);// 设置大小widgetAxesActor->SetTotalLength(2, 2, 2);widget->SetOrientationMarker(widgetAxesActor);widget->SetInteractor(this->interactor());widget->SetEnabled(1);widget->InteractiveOn();// 连接信号槽connect(this, &View3D::rotateBased, this, &View3D::rotateBaseSlot);connect(this, &View3D::rotateBigArmed, this, &View3D::rotateBigArmSlot);connect(this, &View3D::rotateMiddleArmed, this, &View3D::rotateMiddleArmSlot);connect(this, &View3D::rotateSmallArmed, this, &View3D::rotateSmallArmSlot);
}void View3D::addAxis(const Axis& axis)
{vtkNew<vtkTransform> transform;transform->Translate(axis.xyz.x(), axis.xyz.y(), axis.xyz.z());vtkAxesActor* axes = vtkAxesActor::New();transform->RotateX(axis.xyzR.x());transform->RotateY(axis.xyzR.y());transform->RotateZ(axis.xyzR.z());axes->SetUserTransform(transform);// 设置大小axes->SetTotalLength(axis.xyzL.x(), axis.xyzL.y(), axis.xyzL.z());// 设置箭头大小axes->SetConeRadius(axis.xyzL[0] * 0.1);axes->SetCylinderRadius(axis.xyzL[0] * 0.1);axes->SetConeResolution(100);axes->SetCylinderResolution(100);axes->SetXAxisLabelText(axis.labels[0].toStdString().c_str());axes->SetYAxisLabelText(axis.labels[1].toStdString().c_str());axes->SetZAxisLabelText(axis.labels[2].toStdString().c_str());auto xLabelProperty = axes->GetXAxisCaptionActor2D();// 缩小xLabelProperty->SetWidth(axis.xyzL.x() * 0.1);auto yLabelProperty = axes->GetYAxisCaptionActor2D();yLabelProperty->SetWidth(axis.xyzL.y() * 0.1);auto zLabelProperty = axes->GetZAxisCaptionActor2D();zLabelProperty->SetWidth(axis.xyzL.z() * 0.1);// 添加到第一个renderthis->renderWindow()->GetRenderers()->GetFirstRenderer()->AddActor(axes);this->renderWindow()->Render();
}void View3D::rotateBaseSlot(double angle)
{auto&& [a, b, c] = connectRods;// a世界坐标系旋转角归零a->SetOrientation(0, 0, 0);// a 绕世界坐标系旋转到anglea->RotateWXYZ(angle, 0, 0, 1);refresh();
}void View3D::rotateBigArmSlot(double angle)
{auto&& [a, b, c] = connectRods;a->RotateY(angle - a->GetOrientation()[1]);refresh();
}void View3D::rotateMiddleArmSlot(double angle)
{auto&& [a, b, c] = connectRods;b->RotateY(angle - b->GetOrientation()[1]);refresh();
}void View3D::rotateSmallArmSlot(double angle)
{auto&& [a, b, c] = connectRods;c->RotateY(angle - c->GetOrientation()[1]);refresh();
}void View3D::addGuideLine(float r, float space)
{// 创建网格线,间距space,范围-r~rvtkNew<vtkCellArray> lines;vtkNew<vtkPoints> points;for (size_t i = 0; i <= static_cast<unsigned long long>(r / space) * 2; i++) {points->InsertNextPoint(-r, r - space * i, 0);points->InsertNextPoint(r, r - space * i, 0);points->InsertNextPoint(-r + space * i, r, 0);points->InsertNextPoint(-r + space * i, -r, 0);}for (size_t i = 0; i <= static_cast<unsigned long long>(r / space) * 4 + 1; i++) {vtkNew<vtkLine> line;line->GetPointIds()->SetId(0, i * 2);line->GetPointIds()->SetId(1, i * 2 + 1);lines->InsertNextCell(line);}vtkNew<vtkPolyData> linesPolyData;linesPolyData->SetPoints(points);linesPolyData->SetLines(lines);vtkNew<vtkPolyDataMapper> mapper;mapper->SetInputData(linesPolyData);vtkNew<vtkActor> actor;actor->SetMapper(mapper);// 设置透明度actor->GetProperty()->SetOpacity(0.5);this->renderWindow()->GetRenderers()->GetFirstRenderer()->AddActor(actor);this->renderWindow()->Render();
}vtkNew<vtkAxesActor> View3D::getBaseAxes()
{vtkNew<vtkAxesActor> axes;axes->SetTotalLength(1.0, 1.0, 1.0);axes->SetPosition(0, 0, 0);axes->SetShaftType(0);axes->SetConeResolution(100);axes->SetCylinderResolution(100);axes->SetConeRadius(0.1);axes->SetCylinderRadius(0.01);return axes;
}void View3D::refresh()
{this->renderWindow()->Render();
}相关文章:
C++ Qt/VTK装配体组成联动连接杆
效果 关键代码 #include "View3D.h" #include "Axis.h"#include <vtkActor.h> #include <vtkAppendPolyData.h > #include <vtkAreaPicker.h> #include <vtkAxesActor.h> #include <vtkBox.h> #include <vtkCamera.h>…...
File文件查找
用的是递归调用, (递归死循环的结果是导致栈内存溢出错误) 一.代码 package org.example;import java.io.File;public class day03 {public static void main(String[] args) {//文件查找,在d:temp下查找改名.mp4sea…...

小程序 wxml2canvas开发文档
wxml: <view class"share__canvas share__canvas1"><view class"share__canvas1-text draw_canvas" data-type"text" data-text"这是一段无边距文字">这是一段无边距文字</view> </view> <canvas canvas-…...
SpringCloud微服务 【实用篇】| 认识微服务
目录 一:认识微服务 1. 微服务框架介绍 2. 服务架构演变 3. 微服务技术对比 4. SpringCloud 图书推荐:《巧用ChatGPT快速提高职场晋升力》 一:认识微服务 本课程学习于黑马,会通过分层次学习,分为三部分去讲解微…...
Csdn文章编写参考案例
这里写自定义目录标题 欢迎使用Markdown编辑器新的改变功能快捷键合理的创建标题,有助于目录的生成如何改变文本的样式插入链接与图片如何插入一段漂亮的代码片生成一个适合你的列表创建一个表格设定内容居中、居左、居右SmartyPants 创建一个自定义列表如何创建一个…...

Jmeter性能测试:高并发分布式性能测试
一、为什么要进行分布式性能测试 当进行高并发性能测试的时候,受限于Jmeter工具本身和电脑硬件的原因,无法满足我们对大并发性能测试的要求。 基于这种场景下,我们就需要采用分布式的方式来实现我们高并发的性能测试要求。 二、分布式性能…...
2015年亚太杯APMCM数学建模大赛B题城市公共交通服务水平动态评价模型求解全过程文档及程序
2015年亚太杯APMCM数学建模大赛 B题 城市公共交通服务水平动态评价模型 原题再现 城市公共交通服务评价是城市公共交通系统建设和提高公共交通运营效率的重要组成部分。对于公交企业,管理和规划部门,传统公交车站、线路和换乘枢纽的规划数据只是基于主…...

CCF CSP认证历年题目自练 Day40
题目 试题编号: 201412-3 试题名称: 集合竞价 时间限制: 1.0s 内存限制: 256.0MB 问题描述: 问题描述 某股票交易所请你编写一个程序,根据开盘前客户提交的订单来确定某特定股票的开盘价和开盘成交量…...

闲聊一下写技术博客的一些感想
大家好,我是阿赵。 在我的163博客关闭之后,我就把一部分的博文移到了CSDN这边。不过实际上我有好几年都没有写过博客,所以这个博客的浏览量和粉丝数一直都不高。直到今年2023年的2月底开始,打算总结一下3DsMax的MaxScript的用…...
单片机为什么一直用C语言,不用其他编程语言?
单片机为什么一直用C语言,不用其他编程语言? 51 单片机规模小得拮据,C 的优势几乎看不到。放个类型信息进去都费劲,你还想用虚函数?还想模板展开?程序轻松破 10k。最近很多小伙伴找我,说想要一些…...

利用HTTP2,新型DDoS攻击峰值破纪录
亚马逊、Cloudflare 和谷歌周二联合发布消息称,一种依赖于 HTTP/2 快速重置技术的攻击行为对它们造成了破纪录的分布式拒绝服务 (DDoS) 攻击。 根据披露的信息,该攻击自8月下旬以来便一直存在,所利用的漏洞被跟踪为CVE-2023-44487,…...

android鼠标滚轮事件监听方法
Overridepublic boolean onGenericMotionEvent(MotionEvent event) { //The input source is a pointing device associated with a display. //输入源为可显示的指针设备,如:mouse pointing device(鼠标指针),stylus pointing device(尖笔设备)if (0 ! …...

【C语言|关键字】C语言32个关键字详解(4)——其他(typedef、sizeof)
😁博客主页😁:🚀https://blog.csdn.net/wkd_007🚀 🤑博客内容🤑:🍭嵌入式开发、Linux、C语言、C、数据结构、音视频🍭 🤣本文内容🤣&a…...
Hafnium简介和构建
安全之安全(security)博客目录导读 目录 一、Hafnium简介 二、Hafnium构建 2.1.1 先决条件 2.1.1.1 构建Host 2.1.1.2 工具链 2.1.1.3 依赖 2.1.1.4 获取源码 2.1.2 构建 一、Hafnium简介 可信固件为Armv8-A、Armv9-A和Armv8-M提供了安全软件的参考实现。它为SoC开发人…...

2023年香水行业数据分析:国人用香需求升级,高端香水高速增长
在人口结构变迁的背景下,“Z世代”作为当下我国的消费主力,正在将“悦己”消费推动成为新潮流。具备经济基础的“Z世代”倡导“高颜值”、“个性化”、“精致主义”,这和香水、香氛为代表的“嗅觉经济”的特性充分契合,因此&#…...
这可能是最简单的Page Object库
做过web自动化测试的同学,对Page object设计模式应该不陌生。 Page object库应该根据以下目标开发: Page object应该易于使用 清晰的结构 PageObjects 对于页面对象 PageModules对于页面内容 只写测试,而不是基础。 在可能的情况下防止…...
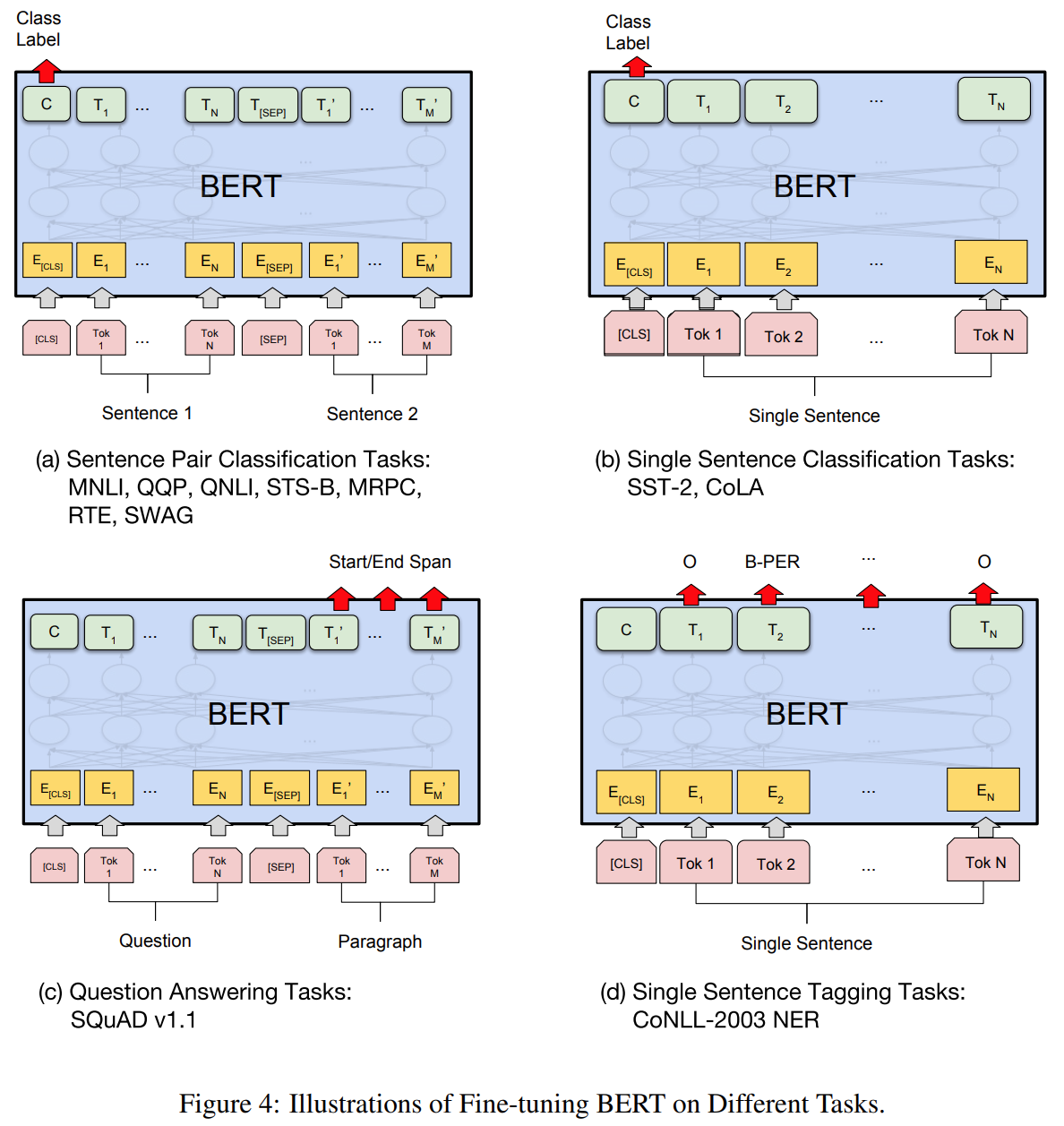
论文阅读——BERT
ArXiv:https://arxiv.org/abs/1810.04805 github:GitHub - google-research/bert: TensorFlow code and pre-trained models for BERT 一、模型及特点: 1、模型: 深层双向transformer encoder结构 BERT-BASE:(L12, H…...

竞赛 深度学习人体跌倒检测 -yolo 机器视觉 opencv python
0 前言 🔥 优质竞赛项目系列,今天要分享的是 🚩 **基于深度学习的人体跌倒检测算法研究与实现 ** 该项目较为新颖,适合作为竞赛课题方向,学长非常推荐! 🥇学长这里给一个题目综合评分(每项满…...

Springboot创建多数据源
yml文件 spring:datasource:dynamic:# 设置默认的数据源或者数据源组,默认值即为 masterprimary: masterdatasource:# 主库数据源master:driver-class-name: com.mysql.cj.jdbc.Driverurl: jdbc:mysql://xxx.xxx.xxx.xxx:3306/test?useUnicodetrue&characterEncodingutf8…...
【Hello Algorithm】滑动窗口内最大值最小值
滑动窗口介绍 滑动窗口是一种我们想象中的数据结构 它是用来解决算法问题的 我们可以想象出一个数组 然后再在这个数组的起始位置想象出两个指针 L 和 R 我们对于这两个指针做出以下规定 L 和 R指针只能往右移动L指针不能走到R指针的右边我们只能看到L指针和R指针中间的数字 …...

百度网盘下载速度太慢?Python脚本帮你获取高速直链
百度网盘下载速度太慢?Python脚本帮你获取高速直链 【免费下载链接】baidu-wangpan-parse 获取百度网盘分享文件的下载地址 项目地址: https://gitcode.com/gh_mirrors/ba/baidu-wangpan-parse 还在为百度网盘几十KB的下载速度而苦恼吗?想要摆脱客…...

用Godot 4.2的ShapePoints库,5分钟搞定游戏UI里的进度条、血条和技能图标
用Godot 4.2的ShapePoints库快速打造游戏UI组件在独立游戏开发中,UI设计往往是容易被忽视却至关重要的环节。传统做法需要美术资源支持,但当项目处于原型阶段或团队资源有限时,程序化生成UI元素就成为高效解决方案。Godot 4.2内置的ShapePoin…...

Arm平台调试工具链全解析与实战指南
1. Arm参考设计平台调试工具全指南作为一名长期从事Arm平台开发的工程师,我深知调试工具链的选择和使用对项目效率的决定性影响。本文将系统梳理Arm参考设计平台(RDP)的全套调试资源,涵盖从基础工具配置到高级调试技巧的完整知识体系。重要提示ÿ…...

告别卡顿!用IL2CPP优化你的Unity游戏:性能提升与包体瘦身实测
告别卡顿!用IL2CPP优化你的Unity游戏:性能提升与包体瘦身实测最近在优化一款Unity游戏时,我发现了一个令人头疼的问题:游戏在低端设备上频繁卡顿,包体大小也超出了预期。经过一番探索,我决定尝试将脚本后端…...

CANN ops-nn:基础神经网络算子的统一实现层
个人主页:ujainu 文章目录 前言仓库定位:为什么需要一层"统一实现"算子不是"公式翻译",是对硬件的谈判Conv2D:im2col 转矩阵乘BatchNorm:推理折叠成逐元素运算Interpolate:双线性插值的…...

机器学习在天文大数据中的应用:自动化分类近邻星系百万恒星
1. 项目概述:当机器学习遇见近邻星系的大质量恒星在浩瀚的宇宙中,大质量恒星(通常指质量超过8倍太阳质量的恒星)是名副其实的“宇宙引擎”。它们虽然数量稀少,但通过强烈的星风和最终的超新星爆发,深刻地影…...

CVE二进制工具:无源码漏洞检测的原理与实战
1. 这不是又一个“扫扫就完事”的漏洞扫描器很多人第一次听说“CVE二进制工具”时,下意识会把它和常见的Web漏洞扫描器(比如Nessus、OpenVAS)划等号——点几下鼠标,跑个任务,出份PDF报告,然后发给安全部门交…...

从集合运算到代码:一文搞懂Jaccard系数,附Python/NumPy/Pandas三种实现方法对比
从集合运算到代码:一文搞懂Jaccard系数,附Python/NumPy/Pandas三种实现方法对比在数据挖掘和机器学习领域,衡量两个集合的相似度是一项基础而重要的任务。Jaccard相似系数作为一种简单直观的度量方法,广泛应用于推荐系统、文本挖掘…...

Solid.js信号驱动架构深度解析:告别虚拟DOM的真正实践
Solid.js信号驱动架构深度解析:告别虚拟DOM的真正实践 作者:Crown_22 | AI Agent & Hermes Agent 桌面程序开发者 前言 2026年的前端框架格局已经发生了深刻变化。React 用 Server Components 重新定义了组件模型,Vue 3.5 用 Vapor 模式抛弃了虚拟 DOM,Svelte 5 用 Ru…...

明日方舟自动化工具终极指南:Arknights-Mower 完整使用教程
明日方舟自动化工具终极指南:Arknights-Mower 完整使用教程 【免费下载链接】arknights-mower 《明日方舟》长草助手 项目地址: https://gitcode.com/gh_mirrors/ar/arknights-mower 作为一款专为《明日方舟》玩家设计的开源自动化工具,Arknights…...