STM智能小车——OLED实现测速小车
目录
1. 测速模块
2. 测试原理和单位换算
3. 定时器和中断实现测速开发和调试代码
4. 小车速度显示在OLED屏
1. 测速模块

- 用途:广泛用于电机转速检测,脉冲计数,位置限位等。
- 有遮挡,输出高电平;无遮挡,输出低电平
- 接线 :VCC 接电源正极3.3-5V
- GND 接电源负极 DO TTL开关信号输出
- AO 此模块不起作用
2. 测试原理和单位换算
- 轮子走一圈,经过一个周长,C = 2x3.14x半径= 3.14 x 直径(6.5cm)
- 对应的码盘也转了一圈,码盘有20个格子,每经过一个格子,会遮挡(高电平)和不遮挡(低电平), 那么一个脉冲就是走了 3.14 * 6.5 cm /20 = 1.0205CM
- 定时器可以设计成一秒,统计脉冲数,一个脉冲就是1cm
- 假设一秒有80脉冲,那么就是80cm/s
3. 定时器和中断实现测速开发和调试代码
测试数据通过串口发送到上位机
硬件接线
测速模块:
- VCC -- 3.3V 不能接5V,否则遮挡一次会触发3次中断
- OUT -- PB14
cubeMX配置

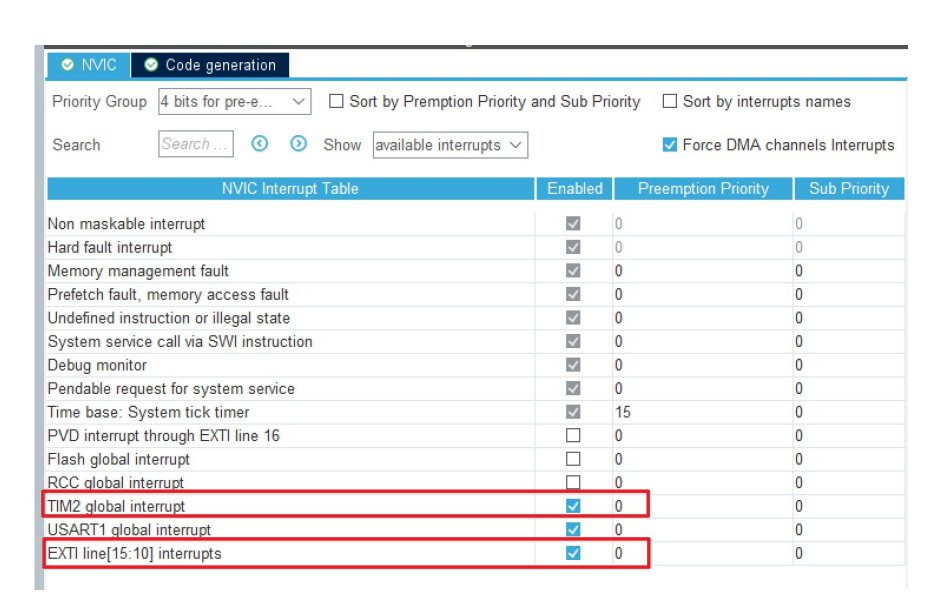
代码实现:
unsigned int speedCnt;void HAL_GPIO_EXTI_Callback(uint16_t GPIO_Pin)
{if (GPIO_Pin == GPIO_PIN_14)if (HAL_GPIO_ReadPin(GPIOB, GPIO_PIN_14) == GPIO_PIN_RESET)speedCnt++;
}
void HAL_TIM_PeriodElapsedCallback(TIM_HandleTypeDef *htim)
{printf("speed: %d\r\n", speedCnt);speedCnt = 0;
}main函数里:
HAL_TIM_Base_Start_IT(&htim2);4. 小车速度显示在OLED屏
OLED模块介绍:STM32 OLED屏幕显示详解
硬件接线
- SCL -- PB6
- SDA -- PB7
代码示例:
oled.c
#include "oled.h"
#include "i2c.h"
#include "oledfont.h"void Oled_Write_Cmd(uint8_t dataCmd)
{HAL_I2C_Mem_Write(&hi2c1, 0x78, 0x00, I2C_MEMADD_SIZE_8BIT,&dataCmd, 1, 0xff);
}void Oled_Write_Data(uint8_t dataData)
{HAL_I2C_Mem_Write(&hi2c1, 0x78, 0x40, I2C_MEMADD_SIZE_8BIT,&dataData, 1, 0xff);
}void Oled_Init(void){Oled_Write_Cmd(0xAE);//--display offOled_Write_Cmd(0x00);//---set low column addressOled_Write_Cmd(0x10);//---set high column addressOled_Write_Cmd(0x40);//--set start line address Oled_Write_Cmd(0xB0);//--set page addressOled_Write_Cmd(0x81); // contract controlOled_Write_Cmd(0xFF);//--128 Oled_Write_Cmd(0xA1);//set segment remap Oled_Write_Cmd(0xA6);//--normal / reverseOled_Write_Cmd(0xA8);//--set multiplex ratio(1 to 64)Oled_Write_Cmd(0x3F);//--1/32 dutyOled_Write_Cmd(0xC8);//Com scan directionOled_Write_Cmd(0xD3);//-set display offsetOled_Write_Cmd(0x00);//Oled_Write_Cmd(0xD5);//set osc divisionOled_Write_Cmd(0x80);//Oled_Write_Cmd(0xD8);//set area color mode offOled_Write_Cmd(0x05);//Oled_Write_Cmd(0xD9);//Set Pre-Charge PeriodOled_Write_Cmd(0xF1);//Oled_Write_Cmd(0xDA);//set com pin configuartionOled_Write_Cmd(0x12);//Oled_Write_Cmd(0xDB);//set VcomhOled_Write_Cmd(0x30);//Oled_Write_Cmd(0x8D);//set charge pump enableOled_Write_Cmd(0x14);//Oled_Write_Cmd(0xAF);//--turn on oled panel
}void Oled_Screen_Clear(void){char i,n;Oled_Write_Cmd (0x20); //set memory addressing modeOled_Write_Cmd (0x02); //page addressing modefor(i=0;i<8;i++){Oled_Write_Cmd(0xb0+i); Oled_Write_Cmd(0x00); Oled_Write_Cmd(0x10); for(n=0;n<128;n++)Oled_Write_Data(0x00); }
}void Oled_Show_Char(char row,char col,char oledChar){ //row*2-2unsigned int i;Oled_Write_Cmd(0xb0+(row*2-2)); //page 0Oled_Write_Cmd(0x00+(col&0x0f)); //lowOled_Write_Cmd(0x10+(col>>4)); //high for(i=((oledChar-32)*16);i<((oledChar-32)*16+8);i++){Oled_Write_Data(F8X16[i]); //写数据oledTable1}Oled_Write_Cmd(0xb0+(row*2-1)); //page 1Oled_Write_Cmd(0x00+(col&0x0f)); //lowOled_Write_Cmd(0x10+(col>>4)); //highfor(i=((oledChar-32)*16+8);i<((oledChar-32)*16+8+8);i++){Oled_Write_Data(F8X16[i]); //写数据oledTable1}
}/******************************************************************************/
// 函数名称:Oled_Show_Char
// 输入参数:oledChar
// 输出参数:无
// 函数功能:OLED显示单个字符
/******************************************************************************/
void Oled_Show_Str(char row,char col,char *str){while(*str!=0){Oled_Show_Char(row,col,*str);str++;col += 8; }
}
main.c
extern uint8_t buf;
unsigned int speedCnt = 0;
char speedMes[24]; //主程序发送速度数据的字符串缓冲区void HAL_GPIO_EXTI_Callback(uint16_t GPIO_Pin)
{if (GPIO_Pin == GPIO_PIN_14)if (HAL_GPIO_ReadPin(GPIOB, GPIO_PIN_14) == GPIO_PIN_RESET)speedCnt++;
}void HAL_TIM_PeriodElapsedCallback(TIM_HandleTypeDef *htim)
{printf("speed: %d\r\n", speedCnt);sprintf(speedMes,"speed:%2d cm/s",speedCnt);//串口数据的字符串拼装,speed是格子,每个格子1cmOled_Show_Str(2,2,speedMes);speedCnt = 0;
}相关文章:
STM智能小车——OLED实现测速小车
目录 1. 测速模块 2. 测试原理和单位换算 3. 定时器和中断实现测速开发和调试代码 4. 小车速度显示在OLED屏 1. 测速模块 用途:广泛用于电机转速检测,脉冲计数,位置限位等。有遮挡,输出高电平;无遮挡,输出低电平接线…...

pod基本概念
目录 pod基本概念 pause容器 Pod分类: Pod容器的分类 1、基础容器(infrastructure container) 2、初始化容器(initcontainers) 3、应用容器(Maincontainer) 镜像拉取策略(im…...

SQL Server 中定时调度调用存储过程
要在SQL中定时调度调用存储过程,你可以使用SQL Server代理(如果你正在使用SQL Server数据库)。下面是一些步骤来配置SQL Server代理以定时调度调用存储过程: 打开SQL Server Management Studio (SSMS) 并连接到你的SQL Server实例…...

SpringCloud(三) Ribbon负载均衡
SpringCloud(二) Eureka注册中心的使用-CSDN博客 在SpringCloud(二)中学习了如何通过Eureka实现服务的注册和发送,从而通过RestTemplate实现不同微服务之间的调用,加上LoadBalance注解之后实现负载均衡,那负载均衡的原理是什么呢? 目录 一, 负载均衡 1.1 负载均衡原理 1.2 源…...

vue2:路由前置守卫无法获取到this.$store.state.xxx
在获取到vuex的数据时候,想在router目录下的index.js文件去获取到vuex仓库中声明的全局变量,但是通过this.$store.stote.xxx去获取的时候,报错提示:$store未定义 一、store/index.js const store new Vuex.Store({state: {// 属…...
Unity的碰撞检测(五)
温馨提示:本文基于前一篇“Unity的碰撞检测(四)”继续探讨两个游戏对象具备刚体的BodyType均为Dynamic,但是Collision Detection属性不同的碰撞检测,阅读本文则默认已阅读前文。 (一)测试说明 在基于两…...
管理)
Flutter笔记:Flutter的应用生命周期状态(lifecycleState)管理
Flutter笔记 Flutter的应用生命周期状态(lifecycleState)管理 作者:李俊才 (jcLee95):https://blog.csdn.net/qq_28550263 邮箱 :291148484163.com 本文地址:https://blog.csdn.net/…...
)
代碼隨想錄算法訓練營|第五十四天|300.最长递增子序列、674. 最长连续递增序列、718. 最长重复子数组。刷题心得(c++)
讀題 300.最长递增子序列 看完代码随想录之后的想法 思想上很簡單,dp[i]表示i之前的包括i的numbers[i]節尾的最長上升子序列的長度 並且透過兩層迴圈,一層遍歷全部,一層遍歷到i,透過比較當前dp[i]還是dp[j] 1哪個比較大&…...
正点原子嵌入式linux驱动开发——Linux 串口RS232/485/GPS 驱动
串口是很常用的一个外设,在Linux下通常通过串口和其他设备或传感器进行通信,根据 电平的不同,串口分为TTL和RS232。不管是什么样的接口电平,其驱动程序都是一样的,通过外接RS485这样的芯片就可以将串口转换为RS485信号…...
HDFS工作流程和机制
HDFS写数据流程(上传文件) 核心概念--Pipeline管道 HDFS在上传文件写数据过程中采用的一种传输方式。 线性传输:客户端将数据写入第一个数据节点,第一个数据节点保存数据之后再将快复制到第二个节点,第二节点复制给…...

CMMI/ASPICE认证咨询及工具服务
服务概述 质量专家戴明博士的名言“如果你不能描述做事情的过程,那么你不知道你在做什么”。过程是连接有能力的工程师和先进技术的纽带,因此产品开发过程直接决定了产品的质量和研发的效率。 经纬恒润可结合多体系要求,如IATF16949\ISO26262…...
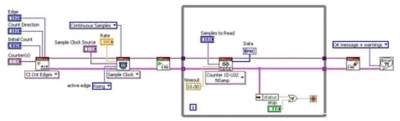
【NI-DAQmx入门】计数器
1.计数器的作用 NI产品的计数器一般来说兼容TTL信号,定义如下:0-0.8V为逻辑低电平,2~5V为高电平,0.8-2V为高阻态,最大上升下降时间为50ns。 计数器可以感测上升沿(从逻辑低到逻辑高的转变)和下降…...

Python爬取读书网的图片链接和书名并保存在数据库中
一个比较基础且常见的爬虫,写下来用于记录和巩固相关知识。 一、前置条件 本项目采用scrapy框架进行爬取,需要提前安装 pip install scrapy# 国内镜像 pip install scrapy -i https://pypi.douban.com/simple 由于需要保存数据到数据库,因…...

js解决加油站
在一条环路上有 n 个加油站,其中第 i 个加油站有汽油 gas[i] 升。 你有一辆油箱容量无限的的汽车,从第 i 个加油站开往第 i1 个加油站需要消耗汽油 cost[i] 升。你从其中的一个加油站出发,开始时油箱为空。 给定两个整数数组 gas 和 cost &…...
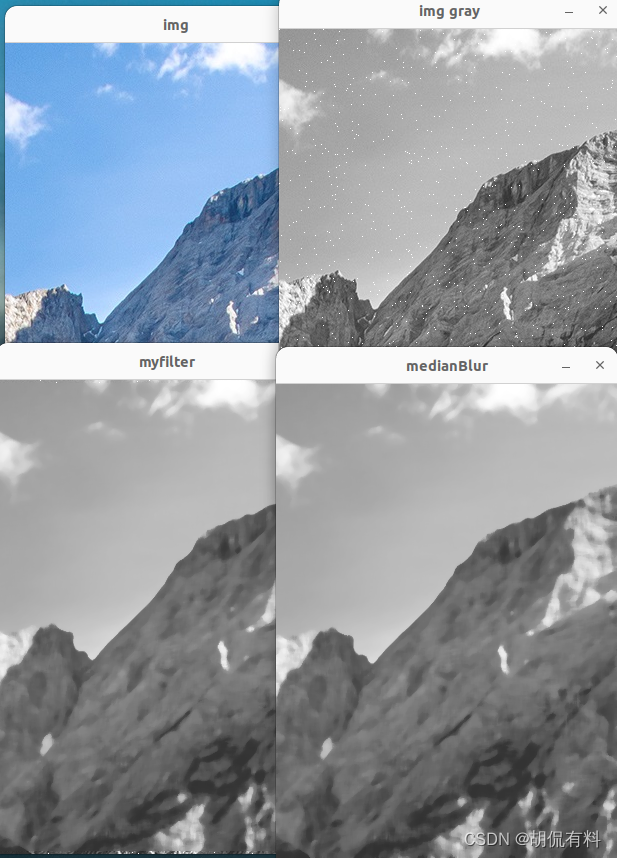
【c++|opencv】二、灰度变换和空间滤波---5.中值滤波
every blog every motto: You can do more than you think. https://blog.csdn.net/weixin_39190382?typeblog 0. 前言 1. 中值滤波 #include<iostream> #include<opencv2/opencv.hpp> #include"Salt.h"using namespace cv; using namespace std;voi…...

python之pytorch多进程
目录 1、创建并运行并行进程 2、使用队列(Queue)来共享数据 3、进程池 4、进程锁 5、比较使用多进程和使用单进程执行一段代码的时间消耗 6、共享变量 多进程是计算机科学中的一个术语,它是指同时运行多个进程,这些进程可以…...

sqoop 抽数报错com.mysql.cj.exceptions.WrongArgumentException: HOUR_OF_DAY: 2 -> 3
文章目录 1.sqoop 抽数报错: Caused by: com.mysql.cj.exceptions.WrongArgumentException: HOUR_OF_DAY: 2 -> 3 at sun.reflect.NativeConstructorAccessorImpl.newInstance0(Native Method) at sun.reflect.NativeConstructorAccessorImpl.newInstance(NativeConstructor…...
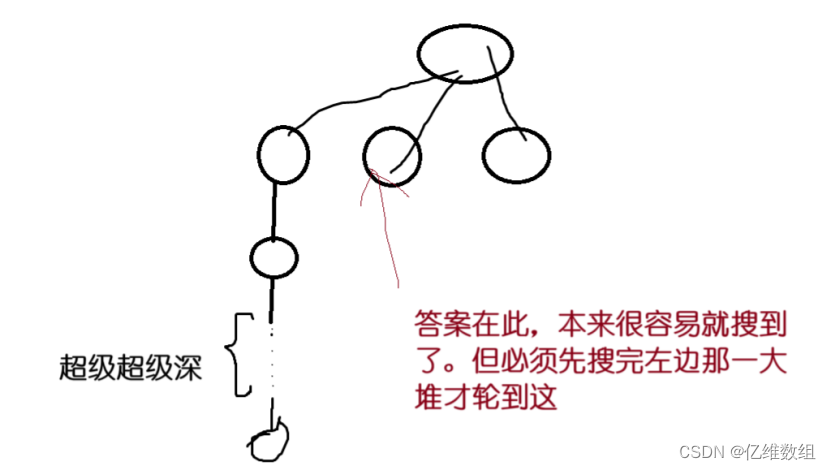
【Acwing170】加成序列(dfs+迭代加深+剪枝)题解和一点感想
本思路来自acwing算法提高课 题目描述 看本文需要准备的知识 1.dfs算法基本思想 2.对剪枝这个词有个简单的认识 迭代加深思想和此题分析 首先,什么是迭代加深呢?当一个问题的解有很大概率出现在递归树很浅的层,但是这个问题的解本身存在…...
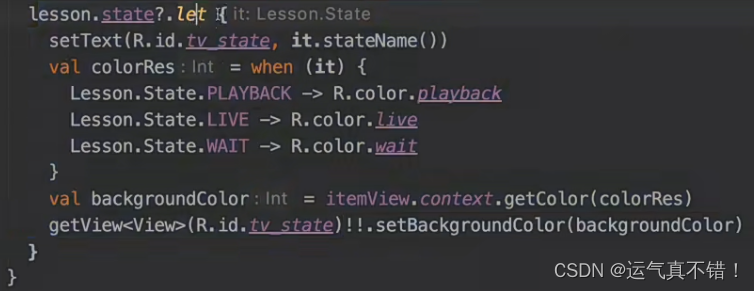
Android开发知识学习——Kotlin进阶
文章目录 次级构造主构造器init 代码块构造属性data class相等性解构Elvis 操作符when 操作符operatorLambdainfix 函数嵌套函数注解使用处目标函数简化函数参数默认值扩展函数类型内联函数部分禁用用内联具体化的类型参数抽象属性委托属性委托类委托 Kotlin 标准函数课后题 次…...

iOS使用AVCaptureSession实现音视频采集
AVCaptureSession配置采集行为并协调从输入设备到采集输出的数据流。要执行实时音视频采集,需要实例化采集会话并添加适当的输入和输出。 AVCaptureSession:管理输入输出音视频流AVCaptureDevice:相机硬件的接口,用于控制硬件特性…...
)
别再依赖SDK了!手把手教你用OpenCV和Eigen从零实现RGB-D相机对齐(附完整C++代码)
从零实现RGB-D相机对齐:OpenCV与Eigen实战指南 在计算机视觉领域,RGB-D相机的深度与彩色图像对齐(D2C)是一个基础但至关重要的技术环节。虽然市面上大多数商用RGB-D相机都提供了现成的SDK和API来实现这一功能,但对于真…...

轻量级工作流编排引擎:从脚本管理到自动化流程的实践指南
1. 项目概述:从单体脚本到流程编排的进化 如果你和我一样,在数据工程、自动化运维或者机器学习模型训练这些领域摸爬滚打过几年,大概率会遇到一个相似的困境:手头的任务脚本越来越多,它们之间有的有依赖关系࿰…...

AI量化交易框架解析:从架构设计到实战部署
1. 项目概述:一个AI驱动的加密资产对冲基金框架最近在GitHub上看到一个挺有意思的项目,叫“ai-hedge-fund-crypto”。光看名字,就能感受到一股浓浓的“量化AI加密”的混合气息。这其实是一个开源框架,旨在帮助开发者或量化研究员&…...

DriveBench:面向真实驾驶场景的长序列多智能体交互基准测试框架
1. 项目概述:从“世界基准”到“驾驶基准”的演进如果你在自动驾驶或者计算机视觉领域摸爬滚打过几年,一定对“基准测试”(Benchmark)这个词又爱又恨。爱的是,它提供了一个相对公平的擂台,让不同算法、不同…...

NS-USBLoader:Switch游戏管理终极指南 - 如何实现一键安装与系统引导?
NS-USBLoader:Switch游戏管理终极指南 - 如何实现一键安装与系统引导? 【免费下载链接】ns-usbloader Awoo Installer and GoldLeaf uploader of the NSPs (and other files), RCM payload injector, application for split/merge files. 项目地址: ht…...

解放你的游戏时间:三月七小助手——星穹铁道自动化终极指南
解放你的游戏时间:三月七小助手——星穹铁道自动化终极指南 【免费下载链接】March7thAssistant 崩坏:星穹铁道全自动 三月七小助手 项目地址: https://gitcode.com/gh_mirrors/ma/March7thAssistant 还在为《崩坏:星穹铁道》中重复的…...
)
【Midjourney数字艺术风格终极指南】:20年AI视觉专家亲授7大核心风格参数调优法则(含V6.1新增Realism Mode实测数据)
更多请点击: https://intelliparadigm.com 第一章:Midjourney数字艺术风格演进与V6.1核心变革 Midjourney自V1发布以来,其图像生成范式经历了从纹理模拟到语义理解、从风格模仿到跨模态协同的深层跃迁。V6.1标志着模型首次在原生架构中集成…...

基于MCP协议构建AI数据连接器:从原理到SQL查询服务器实践
1. 项目概述:一个连接AI与数据源的“翻译官”最近在折腾AI应用开发,特别是想让大语言模型(LLM)能直接、安全地访问我自己的数据库、API或者文件系统时,遇到了一个普遍难题:怎么让AI理解并操作这些外部数据源…...

OpenClaw实战教程:声明式配置驱动的高效数据抓取方案
1. 项目概述:一个关于“OpenClaw”的实战教程 最近在GitHub上看到一个挺有意思的项目,叫“OpenClawTuto”。光看名字,你可能会有点摸不着头脑,这“OpenClaw”到底是个啥?是某种开源机械爪?还是一个代号&…...

Midjourney像素艺术提示词工程:98%新手忽略的4个隐藏权重指令,实测提升风格还原度320%
更多请点击: https://intelliparadigm.com 第一章:Midjourney像素艺术提示词工程的底层逻辑重构 像素艺术在 Midjourney 中并非天然适配的生成模态,其高精度、低分辨率、强风格约束的特性与扩散模型默认的连续性渲染范式存在根本张力。要实现…...