OpenCV标定演示,及如何生成标定板图片
标定的程序在官方的源码里有,
opencv-4.5.5\samples\cpp\tutorial_code\calib3d\camera_calibration
很多小白不知道怎么跑起来,这个也怪OpenCV官方,工作没做完善,其实的default.xml是要自己手动改的,输入的图片也要自己去拍摄,还有那个VID5.xml也要改成可以直接找到图片的路径;
我这里拍了5张图,故意做了鱼眼效果后,用于标定校正。程序已经改好了,直接visual studio就可以跑了,到这里去下载吧,
https://github.com/SpaceView/OpenCV455_cameraCalibrationDemo
关于标定板:
OpenCV官方曾经提供的标定板是CHESSBOARD 9x6和7x7的,实际应用根据场景的需要,可能需要不同的标定板。
标定程序实际支持三种标定板,包括chessboard,grid circle, asymmetric grid circle格子,这里我们手动生成标定板(包括这里提到的三种标定板)的图片, 程序如下,
class CalibTools {public:cv::Mat GenerateChessboard(int xBlockNum, int yBlockNum, int BLOCKWIDTH, std::string saveFileName) {//const int BLOCKWIDTH = 150;//const int xBlockNum = 7;//const int YBlockNum = 7;cv::Size sz = { xBlockNum * BLOCKWIDTH, yBlockNum * BLOCKWIDTH };cv::Mat mat(sz, CV_8UC3);for (int r = 0; r < yBlockNum; r++) {for (int c = 0; c < xBlockNum; c++) {int IX = c * BLOCKWIDTH, IY = r * BLOCKWIDTH;int EX = IX + BLOCKWIDTH, EY = IY + BLOCKWIDTH;cv::Vec3b value;if (0 == (c + r) % 2) {value = { 0xFF,0xFF, 0xFF };}else {value = 0x000000;}for (int y = IY; y < EY; y++) {cv::Vec3b* p = mat.ptr<cv::Vec3b>(y);for (int x = IX; x < EX; x++) {p[x] = value;}}}}if (!saveFileName.empty()) {saveFileName += ".png";cv::imwrite(saveFileName, mat);}return mat;}/** * * * * * * * --> xDotNum1 = 7 _|_ 1* * * * * * * * _|_ 2* * * * * * * * _|_ 3* * * * * * * * _|_ 4* * * * * * * * _|_ 5* * * * * * * * _|_ 6* * * * * * * * _|_ 7 --> In total yDotNum = 7*/cv::Mat GenerateGridCircle(int xDotNum, int yDotNum, int dotRadius, int BLOCKWIDTH, std::string saveFileName) {cv::Size sz = { (xDotNum +1) * BLOCKWIDTH, (yDotNum+1) * BLOCKWIDTH };cv::Mat mat(sz, CV_8UC3);mat.setTo(cv::Scalar(255,255,255));for (int r = 1; r <= yDotNum; r++) {int y = r * BLOCKWIDTH;for (int c = 1; c <= xDotNum; c++) {int x = c * BLOCKWIDTH;cv::circle(mat, cv::Point(x, y), dotRadius, cv::Scalar(0, 0, 0), cv::FILLED);}}if (!saveFileName.empty()) {saveFileName += ".png";cv::imwrite(saveFileName, mat);}return mat;}/** * * * * * * * --> xDotNum1 = 7 |* * * * * * * --> xDotNum2 = 6 _|_ 1, --> 2 rows make 1 unit in yDotNum* * * * * * * * |* * * * * * * _|_ 2* * * * * * * * |* * * * * * * _|_ 3* * * * * * * * |* * * * * * * _|_ 4, --> In total yDotNum = 4* * *<--->* ---> DOTDIST* ** * **/cv::Mat GenerateAsymmetricGridCircle(int xDotNum1, int xDotNum2, int yDotNum, int dotRadius, int DOTDIST, std::string saveFileName) {int totXDotNum = xDotNum1 + xDotNum2 + 2;int totYDotNum = 2 * yDotNum + 2;int DIST = DOTDIST / 2;int HDIST = DIST / 2;cv::Size sz = { totXDotNum * DIST, totYDotNum * DIST };cv::Mat mat(sz, CV_8UC3);mat.setTo(cv::Scalar(255, 255, 255));for (int r = 1; r < totYDotNum-1; r++) {for (int c = 1; c < totXDotNum-1; c++) {int IX = c * DIST, IY = r * DIST;int CX = IX + HDIST, CY = IY + HDIST;if (0 == (c + r) % 2) {cv::circle(mat, cv::Point(CX, CY), dotRadius, cv::Scalar(0, 0, 0), cv::FILLED);}}}if (!saveFileName.empty()) {saveFileName += ".png";cv::imwrite(saveFileName, mat);}return mat;}
};调用方式举例如下,
CalibTools ct;
ct.GenerateChessboard(7, 7, 100, "GenerateChessboard");
ct.GenerateGridCircle(8, 8, 20, 80, "GeneratedGridCircles");
ct.GenerateAsymmetricGridCircle(8, 7, 6, 20, 100, "GenerateAsymmetricGridCircle");这样,就可以生成下列形状的标定板,
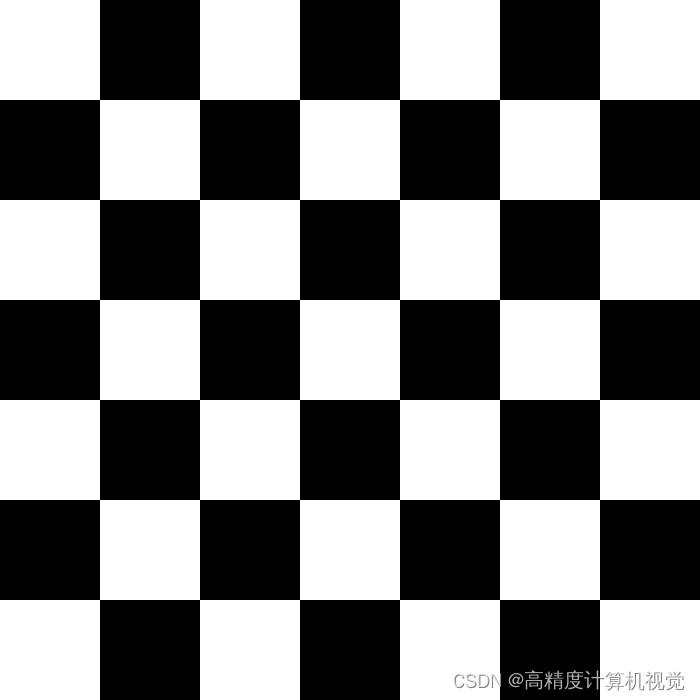
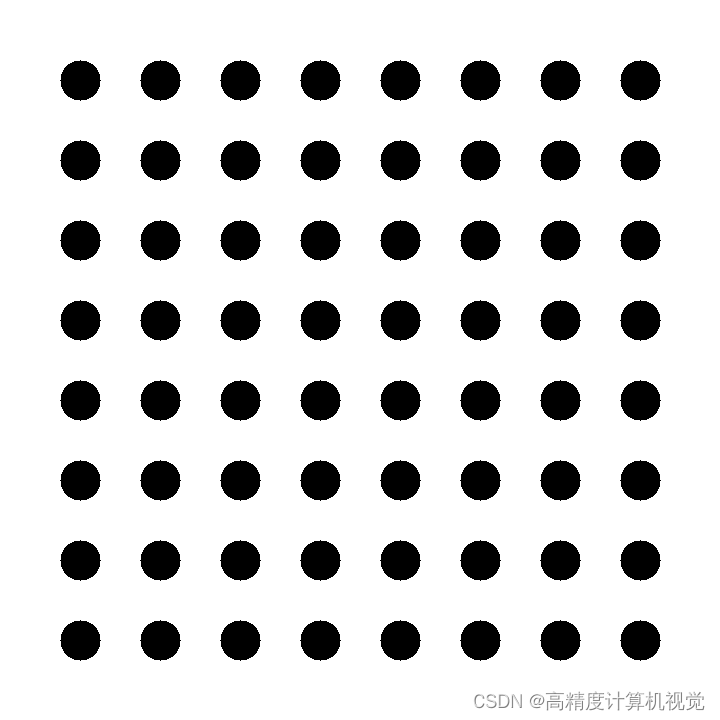

然后打印出来就可以做标定板了。
关于非对称的圆形标定板,可以参考下面的贴子,
OpenCv相机标定——圆形标定板标定_opencv圆形标定板-CSDN博客
本文结束。
相关文章:
OpenCV标定演示,及如何生成标定板图片
标定的程序在官方的源码里有, opencv-4.5.5\samples\cpp\tutorial_code\calib3d\camera_calibration 很多小白不知道怎么跑起来,这个也怪OpenCV官方,工作没做完善,其实的default.xml是要自己手动改的,输入的图片也要…...

python venv 虚拟环境使用
查看py版本python --version 创建虚拟环境 venvdemopython -m venv venvdemo 启动虚拟环境创建好虚拟环境后,当前目录会出现 venvdemo文件夹 cd envdemo\Scripts 执行 ./activate 文件 进入虚拟环境 关闭虚拟环境deactivate 如何查看Python虚拟环境位置python -c …...

useCallback和useMemo的区别?
文章目录 前言useCallbackuseMemouseCallback除了缓存回调函数还可以做什么操作?后言 前言 hello world欢迎来到前端的新世界 😜当前文章系列专栏:react.js 🐱👓博主在前端领域还有很多知识和技术需要掌握࿰…...
Angular组件生命周期详解
当 Angular 实例化组件类 并渲染组件视图及其子视图时,组件实例的生命周期就开始了。生命周期一直伴随着变更检测,Angular 会检查数据绑定属性何时发生变化,并按需更新视图和组件实例。当 Angular 销毁组件实例并从 DOM 中移除它渲染的模板时…...

Redsync 多 Redis 实例使用 demo
完整代码传送门 package mainimport ("context""fmt""net/http""redis-distributed-lock/redis_client""strconv""github.com/go-redsync/redsync/v4""github.com/go-redsync/redsync/v4/redis/goredis/v9&…...
Docker(1)——安装Docker以及配置阿里云镜像加速
目录 一、简介 二、安装Docker 1. 访问Docker官网 2. 卸载旧版本Dokcer 3. 下载yum-utils(yum工具包集合) 4. 设置国内镜像仓库 5. 更新yum软件包索引 6. 安装Docker 7. 启动Docker 8. 卸载Docker 三、阿里云镜像加速 1. 访问阿里云官网 2. …...
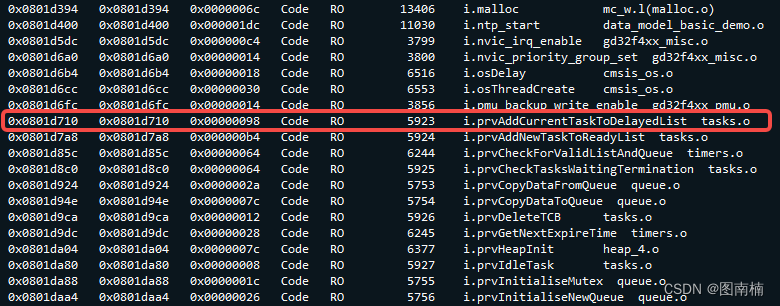
MCU HardFault_Handler调试方法
一.获取内核寄存器的值 1.在MDK的DEBUG模式下,当程序出现跑飞后,确定卡死在HardFault_Handler中断处 2. 通过Register窗口读取LR寄存器的值来确定当前系统使用堆栈是MSP还是PSP LR寄存器值堆栈寄存器0xFFFFFFF9MSP寄存器0xFFFFFFFDPSP寄存器 如下图所…...

【深度学习】AUTOMATIC1111 / stable-diffusion-webui docker
代码:https://github.com/AUTOMATIC1111/stable-diffusion-webui/ CUDA 11.8 制作了一个镜像,可以直接开启stable diffusion的web ui 服务。 确定自己的显卡支持CUDA11.8,启动此镜像方式: docker run -it --networkhost --gpu…...

[Hive] 查询结果保存
文章目录 1.插入新表追加 2.插入hdfs文件系统 1.插入新表 使用INSERT OVERWRITE语句的情况: 整个表:可以使用INSERT OVERWRITE TABLE table_name语句将查询结果直接覆盖整个表中的数据。 INSERT OVERWRITE TABLE table_name SELECT * FROM ...特定分区…...

Es中出现unassigned shards问题解决
1、一般后台会报primary shard is not active Timeout: … 出现这种问题表示该索引是只读了,没办法进行shard及存储操作,优先排除是系统存储盘满了 2、通过监控工具查看(cerebro) 发现该索引shard 1 损坏 也可以通过命令进行查看 GET _cluster/allo…...
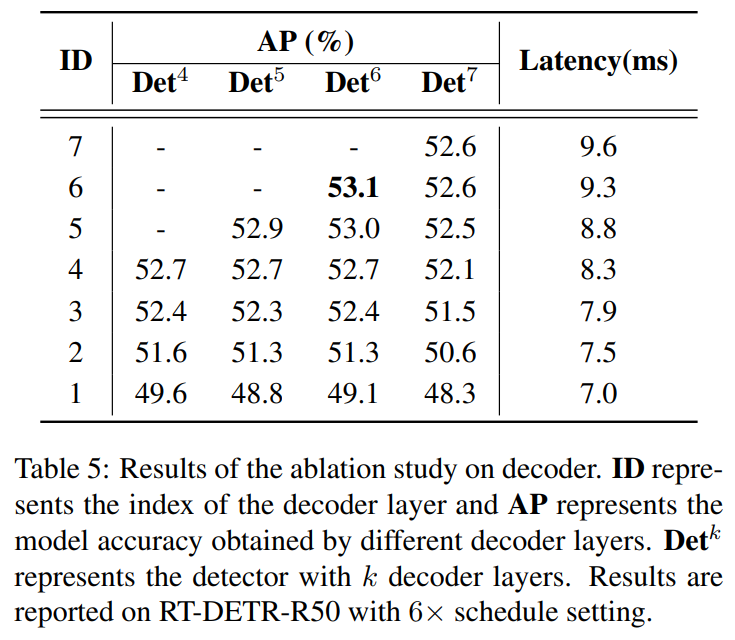
RT-DERT:在实时目标检测上,DETRs打败了yolo
文章目录 摘要1、简介2. 相关研究2.1、实时目标检测器2.2、端到端目标检测器2.3、用于目标检测的多尺度特征 3、检测器的端到端速度3.1、 NMS分析3.2、端到端速度基准测试 4、实时DETR4.1、模型概述4.2、高效的混合编码器4.3、IoU-aware查询选择4.4、RT-DETR的缩放 5、实验5.1、…...

uniapp/H5富文本复制文本功能
代码实现: copy() {let replacedContent this.form.resTaskBaseInfoDetail.content;let text readHtml(replacedContent)// #ifdef H5let textarea document.createElement("textarea")textarea.value texttextarea.readOnly "readOnly"d…...

通付盾Web3专题 | 智能账户:数字时代基础单元
2008年10月31日,中本聪(Satoshi Nakamoto)在P2P foundation 网站发布比特币白皮书《比特币:一种点对点的电子现金系统》。转眼距比特币白皮书发布已过去15年。2009年1月比特币网络正式推出,当时每个比特币的价格仅为0.…...

java网上阅读网站系统eclipse定制开发mysql数据库BS模式java编程jdbc
一、源码特点 JSP 网上阅读网站系统是一套完善的web设计系统,对理解JSP java SSM框架 mvc编程开发语言有帮助,系统具有完整的源代码和数据库,系统主要采用B/S模式开发。开发环境为 TOMCAT7.0,eclipse开发,数据库为Mysql5.0&a…...
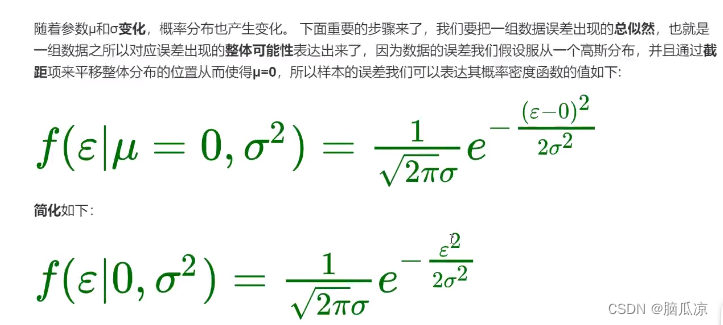
人工智能基础_机器学习007_高斯分布_概率计算_最小二乘法推导_得出损失函数---人工智能工作笔记0047
这个不分也是挺难的,但是之前有详细的,解释了,之前的文章中有, 那么这里会简单提一下,然后,继续向下学习 首先我们要知道高斯分布,也就是,正太分布, 这个可以预测x在多少的时候,概率最大 要知道在概率分布这个,高斯分布公式中,u代表平均值,然后西格玛代表标准差,知道了 这两个…...

开源播放器GSYVideoPlayer的简单介绍及播放rtsp流的优化
开源播放器GSYVideoPlayer的简单介绍及播放rtsp流的优化 前言一、GSYVideoPlayer🔥🔥🔥是什么?二、简单使用1.First、在project下的build.gradle添加2.按需导入3. 常用代码 rtsp流的优化大功告成 总结 前言 本文介绍,…...
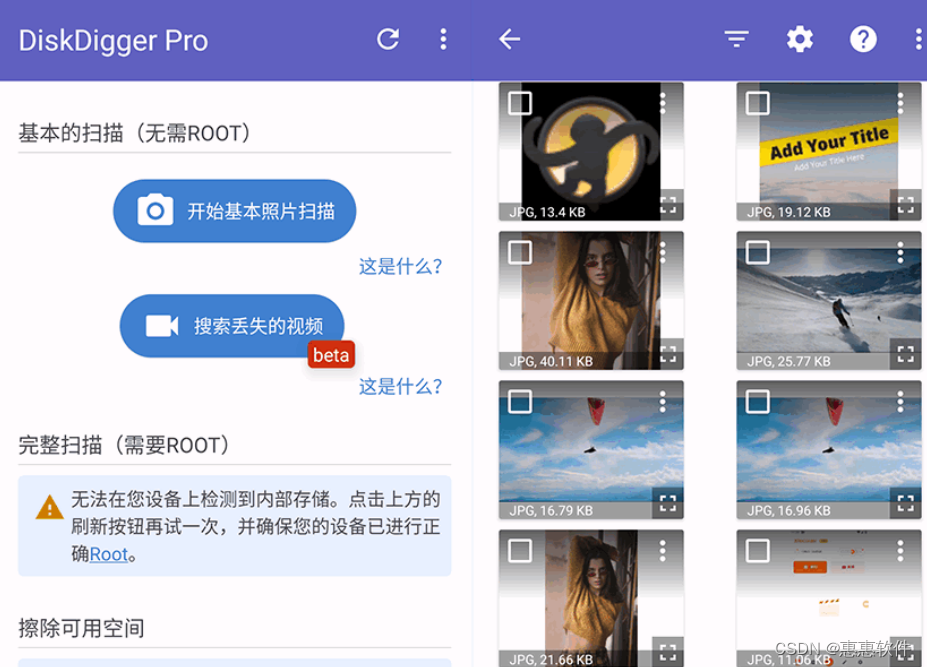
安卓手机数据恢复工具 DiskDigger Pro 中文版-适用于已获得 root 权限的设备!可以从您的存储卡或内存恢复数据
可以从您的存储卡或内存中取消删除和恢复丢失的照片、文档、视频、音乐等。 无论您是不小心删除了文件,还是重新格式化了存储卡,DiskDigger 强大的数据恢复功能都可以找到您丢失的文件并让您恢复它们。 注意:如果您的设备未获得 root 权限&a…...
Python 生成Android不同尺寸的图标
源代码 # -*- coding: utf-8 -*- import sys import os import shutil from PIL import Imagedef generateAndroidIcons():imageSource icon.pngicon Image.open(imageSource)sizes [(android/drawable,512),(android/drawable-hdpi,72),(android/drawable-ldpi,36),(andro…...

PHP使用GuzzleHttp进行HTTP请求
1,composer安装 composer require guzzlehttp/guzzle:~7.0 2,设置过期时间和跳过ssl验证 use GuzzleHttp\Client;$clientnew Client([timeout > 5, verify > false]);2,get请求 use GuzzleHttp\Client;$clientnew Client([timeout > 5, verif…...

pytorch笔记:allclose,isclose,eq,equal
1 allclose 1.1介绍 torch.allclose是一个PyTorch函数,用于检查两个张量是否在某个容忍度范围内近似相等 torch.allclose(input, other, rtol1e-05, atol1e-08, equal_nanFalse)input (Tensor) – 第一个输入张量other (Tensor) – 第二个输入张量rtol (float) –…...

PDF补丁丁完全指南:免费开源PDF工具箱的7个高效使用技巧
PDF补丁丁完全指南:免费开源PDF工具箱的7个高效使用技巧 【免费下载链接】PDFPatcher PDF补丁丁——PDF工具箱,可以编辑书签、剪裁旋转页面、解除限制、提取或合并文档,探查文档结构,提取图片、转成图片等等 项目地址: https://…...

如何用Easy Voice Toolkit轻松实现语音AI全流程:从识别到合成的完整指南
如何用Easy Voice Toolkit轻松实现语音AI全流程:从识别到合成的完整指南 【免费下载链接】Easy-Voice-Toolkit A user-friendly toolkit for voice recgonition/transcription/conversion etc. | 简单易用的语音工具箱 项目地址: https://gitcode.com/gh_mirrors/…...

构建中文AI的未来:MNBVC超大规模语料库的深度解析与实践指南
构建中文AI的未来:MNBVC超大规模语料库的深度解析与实践指南 【免费下载链接】MNBVC MNBVC(Massive Never-ending BT Vast Chinese corpus)超大规模中文语料集。对标chatGPT训练的40T数据。MNBVC数据集不但包括主流文化,也包括各个小众文化甚至火星文的数…...

res-downloader终极指南:5分钟掌握全平台资源高效下载秘籍
res-downloader终极指南:5分钟掌握全平台资源高效下载秘籍 【免费下载链接】res-downloader 视频号、小程序、抖音、快手、小红书、直播流、m3u8、酷狗、QQ音乐等常见网络资源下载! 项目地址: https://gitcode.com/GitHub_Trending/re/res-downloader 想要轻…...

Cursor Free VIP终极指南:5步实现AI编程助手永久免费使用
Cursor Free VIP终极指南:5步实现AI编程助手永久免费使用 【免费下载链接】cursor-free-vip [Support 0.45](Multi Language 多语言)自动注册 Cursor Ai ,自动重置机器ID , 免费升级使用Pro 功能: Youve reached your …...

Windows安全中心空白0x80073d0a注册表修复指南
1. 这不是“界面卡住”,而是Windows安全服务的底层通信断联了你点开Windows 10 Defender安全中心,看到的不是熟悉的病毒防护、防火墙状态、设备性能与健康状况面板,而是一片灰白——顶部菜单栏勉强能显示“主页”“病毒和威胁防护”“防火墙和…...

WeChatExporter:基于Node.js的iOS微信聊天记录解析与导出方案
WeChatExporter:基于Node.js的iOS微信聊天记录解析与导出方案 【免费下载链接】WeChatExporter 一个可以快速导出、查看你的微信聊天记录的工具 项目地址: https://gitcode.com/gh_mirrors/wec/WeChatExporter 在移动应用数据管理领域,iOS系统的沙…...

LoRA微调实战:零基础在笔记本上高效微调大模型
1. 项目概述:为什么LoRA让普通人也能“调教”大模型你有没有过这种时刻:盯着屏幕上那个动辄上百GB的开源大模型权重文件,手指悬在下载按钮上,心里却在盘算——我的笔记本连显存都快被Chrome吃光了,真要跑起来ÿ…...

国产芯片独角兽IPO热潮来袭,百度昆仑芯与阿里平头哥角逐RISC-V弯道超车机遇
国产芯片好消息不断,长鑫科技与长江存储启动IPO,百度昆仑芯、阿里平头哥也有相关动作。互联网大厂钟情自研AI芯片,昆仑芯与平头哥发展路径不同,RISC-V或是弯道超车关键。国产芯片独角兽登场被誉为“存储双雄”的长鑫科技与长江存储…...

NV040D语音芯片在儿童坐姿纠正器中的低成本高效应用
1. 项目概述:从痛点出发的智能硬件设计作为一名在消费电子和智能硬件领域摸爬滚打了十几年的工程师,我见过太多“为设计而设计”的产品,它们功能花哨,却往往忽略了最核心的用户需求。今天想和大家深入聊聊的,是一个看似…...