自动驾驶算法(一):Dijkstra算法讲解与代码实现
目录
0 本节关键词:栅格地图、算法、路径规划
1 Dijkstra算法详解
2 Dijkstra代码详解
0 本节关键词:栅格地图、算法、路径规划

1 Dijkstra算法详解
用于图中寻找最短路径。节点是地点,边是权重。
从起点开始逐步扩展,每一步为一个节点找到最短路径:
While True:
1.从未访问的节点选择距离最小的节点收录(贪心思想)
2.收录节点后遍历该节点的邻接节点,更新距离我们举例子说明一下,在机器人路径规划中,通常用open list、closed list表达:
open list 表示从该节点到起点已经有路径的节点
closed list 表示已经找到最短路径的节点
Step1:从起点开始,将起点放入open list中,选择距离最短的节点进行收录。
open list 1(0)(min) closed list| |open list closed list 1(0)Step2:遍历1号节点的邻接节点(4、2号节点)
open list 2(2)(1-->2) 4(1)(1-->4)(min) closed list 1(0)| |open list 2(2)(1-->2) closed list 1(0) 4(1)(1-->4)4号节点收录后我们需要对其邻接节点更新距离。(3、6、7号节点)
Step3:3号节点我们找到1->4->3路径,6号节点我们找到1->4->6路径,7号节点我们找到1->4->7路径。
open list 2(2)(1-->2)(min) 3(3)(1-->4-->3) 6(9)(1-->4-->6) 7(5)(1-->4-->7) closed list 1(0)| |open list 3(3)(1-->4-->3) 6(9)(1-->4-->6) 7(5)(1-->4-->7) closed list 1(0) 4(1)(1-->4) 2(2)(1-->2)Step4:遍历2的邻接节点,我们发现4号节点已经在close list中(不需要被更新),我们更新5号节点。
open list 3(3)(1-->4-->3)(min) 6(9)(1-->4-->6) 7(5)(1-->4-->7) 5(13)(1->2-->5) closed list 1(0)| |open list 6(9)(1-->4-->6) 7(5)(1-->4-->7) 5(13)(1->2-->5) closed list 1(0) 4(1)(1-->4) 2(2)(1-->2) 3(3)(1-->4-->3)Step5:遍历3的邻接节点,(3-->1无需更新,更新3-->6 1436(8) (因为我们有到3的最短距离)),而我们已经为6号节点找到路径6(9)(146),更新6号节点的路径。
open list 6(9)(1-->4-->6)(1->4->3-->6 7) 7(5)(1-->4-->7)(min) 5(13)(1->2-->5) closed list 1(0) 4(1)(1-->4) 2(2)(1-->2) 3(3)(1-->4-->3)| |open list 6(8)(1->4->3-->6) 5(13)(1->2-->5) closed list 1(0) 4(1)(1-->4) 2(2)(1-->2) 3(3)(1-->4-->3) 7(5)(1-->4-->7)Step6:遍历7的邻接节点(6号节点)(1 4 7 6 = 6)比之前的8小,对6号距离再次更新。
open list 6(8)(1->4->3-->6)(1->4->7-->6 6)(min) 5(13)(1->2-->5) closed list 1(0) 4(1)(1-->4) 2(2)(1-->2) 3(3)(1-->4-->3) 7(5)(1-->4-->7) | |open list 5(13)(1->2-->5) closed list 1(0) 4(1)(1-->4) 2(2)(1-->2) 3(3)(1-->4-->3) 7(5)(1-->4-->7) 6(6)(1-->4-->7-->6)Step7:遍历6的邻接节点(6号节点)结束
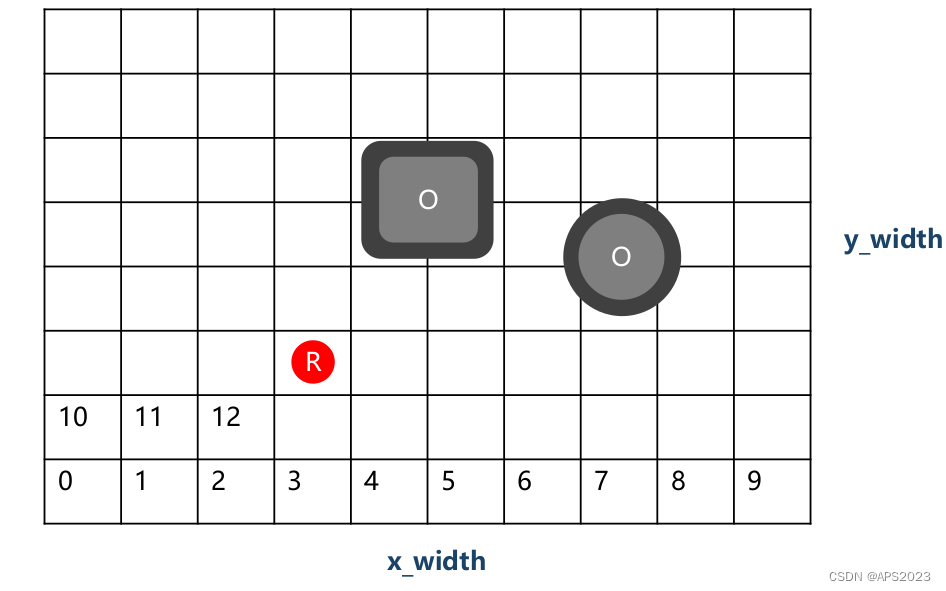
栅格地图初介绍:
假设图中灰色的是障碍物,红色的是机器人。在避障时,我们的常用做法是通过膨胀障碍物,将机器人视为质点来规划路径,然后对地图进行栅格化,将地图弄成一块一块的。最后将栅格地图转化为有权地图。我们可以把栅格地图的每个栅格看作是有权图的节点,机器人的运动范围可以看作是有权图的节点和节点之间的连接。




2 Dijkstra代码详解
这里我们先配置下代码环境,最好是在python3.9下,我们创建conda虚拟环境:
conda create -n nav python=3.9安装所需库:
pip install numpy scipy matplotlib pandas cvxpy pytest -i https://pypi.tuna.tsinghua.edu.cn/simple我们的代码如下:
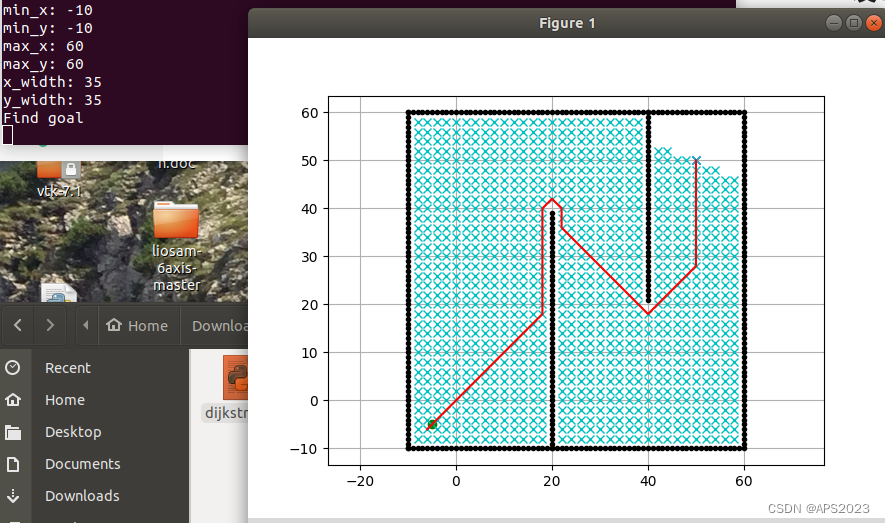
"""Grid based Dijkstra planningauthor: Atsushi Sakai(@Atsushi_twi)"""import matplotlib.pyplot as plt import mathshow_animation = Trueclass Dijkstra:def __init__(self, ox, oy, resolution, robot_radius):"""Initialize map for planningox: x position list of Obstacles [m]oy: y position list of Obstacles [m]resolution: grid resolution [m]rr: robot radius[m]"""self.min_x = Noneself.min_y = Noneself.max_x = Noneself.max_y = Noneself.x_width = Noneself.y_width = Noneself.obstacle_map = Noneself.resolution = resolutionself.robot_radius = robot_radiusself.calc_obstacle_map(ox, oy)self.motion = self.get_motion_model()class Node:def __init__(self, x, y, cost, parent_index):self.x = x # index of gridself.y = y # index of gridself.cost = cost # g(n)self.parent_index = parent_index # index of previous Nodedef __str__(self):return str(self.x) + "," + str(self.y) + "," + str(self.cost) + "," + str(self.parent_index)def planning(self, sx, sy, gx, gy):"""dijkstra path searchinput:s_x: start x position [m]s_y: start y position [m]gx: goal x position [m]gx: goal x position [m]output:rx: x position list of the final pathry: y position list of the final path"""start_node = self.Node(self.calc_xy_index(sx, self.min_x),self.calc_xy_index(sy, self.min_y), 0.0, -1) # round((position - minp) / self.resolution)goal_node = self.Node(self.calc_xy_index(gx, self.min_x),self.calc_xy_index(gy, self.min_y), 0.0, -1)open_set, closed_set = dict(), dict() # key - value: hash表open_set[self.calc_index(start_node)] = start_nodewhile 1:c_id = min(open_set, key=lambda o: open_set[o].cost) # 取cost最小的节点current = open_set[c_id]# show graphif show_animation: # pragma: no coverplt.plot(self.calc_position(current.x, self.min_x),self.calc_position(current.y, self.min_y), "xc")# for stopping simulation with the esc key.plt.gcf().canvas.mpl_connect('key_release_event',lambda event: [exit(0) if event.key == 'escape' else None])if len(closed_set.keys()) % 10 == 0:plt.pause(0.001)# 判断是否是终点if current.x == goal_node.x and current.y == goal_node.y:print("Find goal")goal_node.parent_index = current.parent_indexgoal_node.cost = current.costbreak# Remove the item from the open setdel open_set[c_id]# Add it to the closed setclosed_set[c_id] = current# expand search grid based on motion modelfor move_x, move_y, move_cost in self.motion:node = self.Node(current.x + move_x,current.y + move_y,current.cost + move_cost, c_id)n_id = self.calc_index(node)if n_id in closed_set:continueif not self.verify_node(node):continueif n_id not in open_set:open_set[n_id] = node # Discover a new nodeelse:if open_set[n_id].cost >= node.cost:# This path is the best until now. record it!open_set[n_id] = noderx, ry = self.calc_final_path(goal_node, closed_set)return rx, rydef calc_final_path(self, goal_node, closed_set):# generate final courserx, ry = [self.calc_position(goal_node.x, self.min_x)], [self.calc_position(goal_node.y, self.min_y)]parent_index = goal_node.parent_indexwhile parent_index != -1:n = closed_set[parent_index]rx.append(self.calc_position(n.x, self.min_x))ry.append(self.calc_position(n.y, self.min_y))parent_index = n.parent_indexreturn rx, rydef calc_position(self, index, minp):pos = index * self.resolution + minpreturn posdef calc_xy_index(self, position, minp):return round((position - minp) / self.resolution)def calc_index(self, node):return node.y * self.x_width + node.xdef verify_node(self, node):px = self.calc_position(node.x, self.min_x)py = self.calc_position(node.y, self.min_y)if px < self.min_x:return Falseif py < self.min_y:return Falseif px >= self.max_x:return Falseif py >= self.max_y:return Falseif self.obstacle_map[node.x][node.y]:return Falsereturn Truedef calc_obstacle_map(self, ox, oy):''' 第1步:构建栅格地图 '''self.min_x = round(min(ox))self.min_y = round(min(oy))self.max_x = round(max(ox))self.max_y = round(max(oy))print("min_x:", self.min_x)print("min_y:", self.min_y)print("max_x:", self.max_x)print("max_y:", self.max_y)self.x_width = round((self.max_x - self.min_x) / self.resolution)self.y_width = round((self.max_y - self.min_y) / self.resolution)print("x_width:", self.x_width)print("y_width:", self.y_width)# obstacle map generation# 初始化地图self.obstacle_map = [[False for _ in range(self.y_width)]for _ in range(self.x_width)]# 设置障碍物for ix in range(self.x_width):x = self.calc_position(ix, self.min_x)for iy in range(self.y_width):y = self.calc_position(iy, self.min_y)for iox, ioy in zip(ox, oy):d = math.hypot(iox - x, ioy - y)if d <= self.robot_radius:self.obstacle_map[ix][iy] = Truebreak@staticmethoddef get_motion_model():# dx, dy, costmotion = [[1, 0, 1],[0, 1, 1],[-1, 0, 1],[0, -1, 1],[-1, -1, math.sqrt(2)],[-1, 1, math.sqrt(2)],[1, -1, math.sqrt(2)],[1, 1, math.sqrt(2)]]return motiondef main():# start and goal positionsx = -5.0 # [m]sy = -5.0 # [m]gx = 50.0 # [m]gy = 50.0 # [m]grid_size = 2.0 # [m]robot_radius = 1.0 # [m]# set obstacle positionsox, oy = [], []for i in range(-10, 60):ox.append(i)oy.append(-10.0)for i in range(-10, 60):ox.append(60.0)oy.append(i)for i in range(-10, 61):ox.append(i)oy.append(60.0)for i in range(-10, 61):ox.append(-10.0)oy.append(i)for i in range(-10, 40):ox.append(20.0)oy.append(i)for i in range(0, 40):ox.append(40.0)oy.append(60.0 - i)if show_animation: # pragma: no coverplt.plot(ox, oy, ".k")plt.plot(sx, sy, "og")plt.plot(gx, gy, "xb")plt.grid(True)plt.axis("equal")dijkstra = Dijkstra(ox, oy, grid_size, robot_radius)rx, ry = dijkstra.planning(sx, sy, gx, gy)if show_animation: # pragma: no coverplt.plot(rx, ry, "-r")plt.pause(0.01)plt.show()if __name__ == '__main__':main()先执行一下看看效果:
我们现在来详解一下:
我们从main函数开始:
# 1. 设置起点和终点sx = -5.0 # [m]sy = -5.0 # [m]gx = 50.0 # [m]gy = 50.0 # [m]# 2. 设置珊格的大小和机器人的半径grid_size = 2.0 # [m]robot_radius = 1.0 # [m]# 3. 设置障碍物的位置(图中的黑点就是)ox, oy = [], []# 3.1 设置外围的四堵墙 (-10,-10) --> (60,-10) 最下面的一条线for i in range(-10, 60):ox.append(i)oy.append(-10.0)# 3.1 设置外围的四堵墙 (60,-10) --> (60,60) 最右面的一条线for i in range(-10, 60):ox.append(60.0)oy.append(i)# 3.1 设置外围的四堵墙 (-10,60) --> (61,60) 最上面的一条线for i in range(-10, 61):ox.append(i)oy.append(60.0)# 3.1 设置外围的四堵墙 (-10,-10) --> (-10,61) 最左面的一条线for i in range(-10, 61):ox.append(-10.0)oy.append(i)# 3.2 障碍物for i in range(-10, 40):ox.append(20.0)oy.append(i)for i in range(0, 40):ox.append(40.0)oy.append(60.0 - i)# 4 画图 起点、终点、障碍物都画出来if show_animation: # pragma: no coverplt.plot(ox, oy, ".k")plt.plot(sx, sy, "og")plt.plot(gx, gy, "xb")plt.grid(True)plt.axis("equal")这段代码就设置了边框和障碍物区域并把他们可视化了:
就是我图中画的区域。
#生成了Dijkstra的对象 调用其中的方法(障碍物信息、珊格大小、机器人半径)dijkstra = Dijkstra(ox, oy, grid_size, robot_radius)生成了Dijkstra的对象。我们来看这个类的构造函数,进入一个类首先执行构造函数:
def __init__(self, ox, oy, resolution, robot_radius):"""Initialize map for planningox: x position list of Obstacles [m]oy: y position list of Obstacles [m]resolution: grid resolution [m]rr: robot radius[m]"""self.min_x = Noneself.min_y = Noneself.max_x = Noneself.max_y = Noneself.x_width = Noneself.y_width = Noneself.obstacle_map = None# 珊格大小self.resolution = resolution# 机器人半径self.robot_radius = robot_radius# 构建珊格地图self.calc_obstacle_map(ox, oy)self.motion = self.get_motion_model()我们先来看是怎么创建珊格地图的:
def calc_obstacle_map(self, ox, oy):''' 第1步:构建栅格地图 '''# 1. 获得地图的边界值self.min_x = round(min(ox))self.min_y = round(min(oy))self.max_x = round(max(ox))self.max_y = round(max(oy))print("min_x:", self.min_x)print("min_y:", self.min_y)print("max_x:", self.max_x)print("max_y:", self.max_y)# 2.计算x、y方向珊格个数self.x_width = round((self.max_x - self.min_x) / self.resolution)self.y_width = round((self.max_y - self.min_y) / self.resolution)print("x_width:", self.x_width)print("y_width:", self.y_width)# obstacle map generation# 3.初始化地图 都设置为false 表示还没有设置障碍物self.obstacle_map = [[False for _ in range(self.y_width)]for _ in range(self.x_width)]# 4.设置障碍物 遍历每一个栅格for ix in range(self.x_width):# 通过下标计算珊格位置x = self.calc_position(ix, self.min_x)for iy in range(self.y_width):y = self.calc_position(iy, self.min_y)# 遍历障碍物for iox, ioy in zip(ox, oy):# 计算障碍物到珊格的距离d = math.hypot(iox - x, ioy - y)# 膨胀障碍物 如果距离比机器人半径小 机器人不能通行if d <= self.robot_radius:# 设置为trueself.obstacle_map[ix][iy] = Truebreak首先我们获得了地图的边界值,算出了每一个方向上有多少珊格数量。
比如我们的长是100m(self.max_x - self.min_x = 100),珊格大小为3,那么我们每一行不就是有33个珊格啦~。
我们初始化obstacle_map,这个大小为珊格长 * 珊格宽的大小,我们将他们初始化为false表示这个地方没有障碍物。
然后我们遍历每一个珊格for ix in range(self.x_width)、for iy in range(self.y_width)。我们来看看calc_position这个方法做了什么。
def calc_position(self, index, minp):pos = index * self.resolution + minpreturn pos其实就计算了珊格所在位置的真实(x,y)坐标,比如我们的self.minx = 10,ix = 0,那么他的pos = 0 * 2 + 10 = 10,比如我们的self.minx = 10,ix = 1,那么他的pos = 1 * 2 + 10 = 12。我们遍历所有障碍物体的坐标,计算障碍物体(真实坐标)与这个机器人的距离,如果这个距离比机器人自身的大小小的话,我们将这个地方的珊格标志置为false表示有东西。
那么,在完成这个函数calc_obstacle_map时候,我们有了一张珊格地图,里面充斥着false和true,如果为true的话,那么机器人是过不去的,这块也就是设置成了障碍物区域。
我们接着往下看构造函数:
self.calc_obstacle_map(ox, oy)self.motion = self.get_motion_model()self.motion = self.get_motion_model()这段代码建立了机器人的运动模型和运动代价:
def get_motion_model():# dx, dy, costmotion = [[1, 0, 1], #x增加1,y不变 代价为1[0, 1, 1],[-1, 0, 1],[0, -1, 1],[-1, -1, math.sqrt(2)],[-1, 1, math.sqrt(2)],[1, -1, math.sqrt(2)],[1, 1, math.sqrt(2)]]return motion这里也就是机器人向左走(x+1,y+0)代价为1,斜着走代价为根号2。到此为止,我们构造函数讲解完了。我们返回主函数。
open_set这里开始正式进入路径规划了。传入的参数为起点坐标和终点坐标:
自动驾驶算法(一):Dijkstra算法讲解与代码实现我们先看下node类。
class Node:def __init__(self, x, y, cost, parent_index):self.x = x # index of gridself.y = y # index of gridself.cost = cost # g(n)self.parent_index = parent_index # index of previous Nodedef __str__(self):return str(self.x) + "," + str(self.y) + "," + str(self.cost) + "," + str(self.parent_index)首先执行构造函数,我们发现就是把珊格的(x,y)坐标(并非真实坐标是珊格的)还有cost(后文说)以及父节点的ID赋值了。(so easy)
我们在看一下calc_xy_index函数:
def calc_xy_index(self, position, minp):return round((position - minp) / self.resolution)它就是计算出真实世界的点点属于哪一个珊格的某一维度的坐标,我们举个例子:
self.calc_xy_index(sx, self.min_x) sx = 30 minx = 20这就代表我们的地图边界的 x 坐标为20,这个点的坐标x=30,我们用(30-20)/2 = 5,那么这个珊格坐标的x方向的坐标就是5。
start_node = self.Node(self.calc_xy_index(sx, self.min_x),self.calc_xy_index(sy, self.min_y), 0.0, -1) # round((position - minp) / self.resolution)goal_node = self.Node(self.calc_xy_index(gx, self.min_x),self.calc_xy_index(gy, self.min_y), 0.0, -1)因此,这段代码的含义就是我们计算出了起始和终止点的珊格坐标,并且将代价置为0,且他们的父节点为-1(没有父亲节点)。封装成了node。
下面进入算法部分,我们看流程图:
代码部分和流程图是一样的:
1.首先我们把起点放入openlist中:
# 设置openlist closelist 基于哈希表open_set, closed_set = dict(), dict() # key - value: hash表# 将startnode放进openset里面 索引为一维数组open_set[self.calc_index(start_node)] = start_node看一下calc_index函数:这里将珊格地图映射成了一个一维数组,返回数组的ID,类似C++中的二维数组降维。这里openset是一个字典,里面的key是珊格地图点的ID,value是这个珊格节点。
def calc_index(self, node):return node.y * self.x_width + node.x2.while True进入循环
while 1:2.1 取openlist cost最小的节点作为当前节点
c_id = min(open_set, key=lambda o: open_set[o].cost)current = open_set[c_id]2.2.1 判断当前是否为终点,如果是终点,如果是终点的话把终点的cost修改为当前点的cost值,且终点的父亲节点为当前点的父亲节点。
# 判断是否是终点if current.x == goal_node.x and current.y == goal_node.y:print("Find goal")# 当前节点的信息赋值给终点goal_node.parent_index = current.parent_indexgoal_node.cost = current.costbreak2.2.2 不是最终节点的话从openlist删除加入到closelist
# 把当前节点从openset里面删掉del open_set[c_id]# 加入到closed setclosed_set[c_id] = current2.3 遍历其9个邻接运动节点
for move_x, move_y, move_cost in self.motion:2.3.1 封装邻接节点
node = self.Node(current.x + move_x,current.y + move_y,current.cost + move_cost, c_id)这个点到邻接节点的移动就是 x +-( 1或-1或+根号2或-根号2),然后移动上下的话它的代价值需要+1,斜着移动需要 + 根号2,这样递归的进行我们就求出来所有点的代价值了,同样这个新走的点是通过我们这个点走过来的,因此新点的父节点就是我们这个点。
2.3.2 求当前节点的一维索引判断是否收录到closelist并判断是否可行,如果收录了,那么已经有最小路径了不需要我们再去处理了,还需要判断这个节点是否在珊格地图标记为false点上(珊格地图就是这么用的....)如果这个地方有障碍物那么我们也走不了。
# 求当前节点的keyn_id = self.calc_index(node)# 是否已经收录到close set里面if n_id in closed_set:continue# 邻接节点是否可行if not self.verify_node(node):continue2.3.3 如果不在openset里面我们就将她作为一个新节点加入,如果在openset比较值是否是最优更新,是否和之前的最优路径有重叠。
if n_id not in open_set:open_set[n_id] = node # Discover a new nodeelse:if open_set[n_id].cost >= node.cost:# This path is the best until now. record it!open_set[n_id] = node到这里我们的算法就结束了。我们迭代找到最终点后算法就break掉了~。
最后我们计算路径:
def calc_final_path(self, goal_node, closed_set):# generate final courserx, ry = [self.calc_position(goal_node.x, self.min_x)], [self.calc_position(goal_node.y, self.min_y)]parent_index = goal_node.parent_indexwhile parent_index != -1:n = closed_set[parent_index]rx.append(self.calc_position(n.x, self.min_x))ry.append(self.calc_position(n.y, self.min_y))parent_index = n.parent_indexreturn rx, ry我们将最终节点的珊格坐标还原成真实的三维坐标,并向前找他们的父亲节点直到起始节点(parent_index= -1),我们就出来这个路径了。


相关文章:
自动驾驶算法(一):Dijkstra算法讲解与代码实现
目录 0 本节关键词:栅格地图、算法、路径规划 1 Dijkstra算法详解 2 Dijkstra代码详解 0 本节关键词:栅格地图、算法、路径规划 1 Dijkstra算法详解 用于图中寻找最短路径。节点是地点,边是权重。 从起点开始逐步扩展,每一步为一…...

MS5910PA为行业内领先的可配置10bit到16bit分辨率的旋变数字转换器,可替代AD2S1210
MS5910PA 是一款可配置 10bit 到 16bit 分辨率的旋 变数字转换器。片上集成正弦波激励电路,正弦和余弦 允许输入峰峰值幅度为 2.3V 到 4.0V ,频率范围为 2kHz 至 20kHz 。 转换器可并行或串行输出角度和速度对应的 数字量。 MS5910PA 采…...
Random指定随机种子遇到的坑
提示:文章写完后,目录可以自动生成,如何生成可参考右边的帮助文档 文章目录 前言指定随机种子出现的问题?总结 前言 业务中,之前有一个抽奖的需求,之初想让固定的奖品和玩家绑定一个固定的池子,…...

2023云栖大会:属于开发者的狂欢
就在10月31日这天,杭州云栖小镇热闹非凡,第八届云栖大会在杭州云栖小镇盛大举行。这次大会以“聚焦大模型与生成式AI”为主题,开发者们齐聚一堂,共同探讨前沿技术趋势,以及如何将这些技术应用到实际业务场景中。 当然…...

jsp 网上订餐Myeclipse开发mysql数据库web结构java编程计算机网页项目
选题目的 本设计课题为网上订餐系统设计与实现,提供无纸化点餐、支付,实现点餐快捷,方便管理。餐厅电子化是目前的潮流和趋势,大多数企业都将公司内部运营流程电子化。网上订餐管理系统应运而生,能够有效提高公司的管…...

优化大表分页查询性能:大表LIMIT 1000000, 10该怎么优化?
在处理大数据量的MySQL表时,我们经常会遇到一个问题:当我们尝试使用LIMIT语句进行分页查询时,性能会随着偏移量的增加而显著下降。例如,SELECT * FROM table LIMIT 1000000, 10 这样的查询可能会非常慢。那么,我们应该…...
ubuntu PX4 vscode stlink debug设置
硬件 stlink holybro debug板 pixhawk4 安装openocd 官方文档,但是第一步安装建议从源码安装,bug少很多 github链接 编译安装,参考 ./bootstrap (when building from the git repository)./configure [options]makesudo make install安装后…...

Flask的一种启动方式和三种托管方式
1. 原生启动 Flask 支持使用原生的 app.run() 方法来启动应用程序。这种方法是最简单、最基本的启动方式,适用于开发环境和小型应用程序。 from flask import Flaskapp Flask(__name__)app.route(/) def hello_world():return Hello, World!if __name__ __main__…...

cudnn too short
原因是libcudnn.so为软链接,相当于快捷键,但是没有映射到真正的libcudnn.so.8.9.5上 cd /usr/local/cuda-11.6/lib64 ln -s libcudnn.so.8.9.5 libcudnn.so.8...
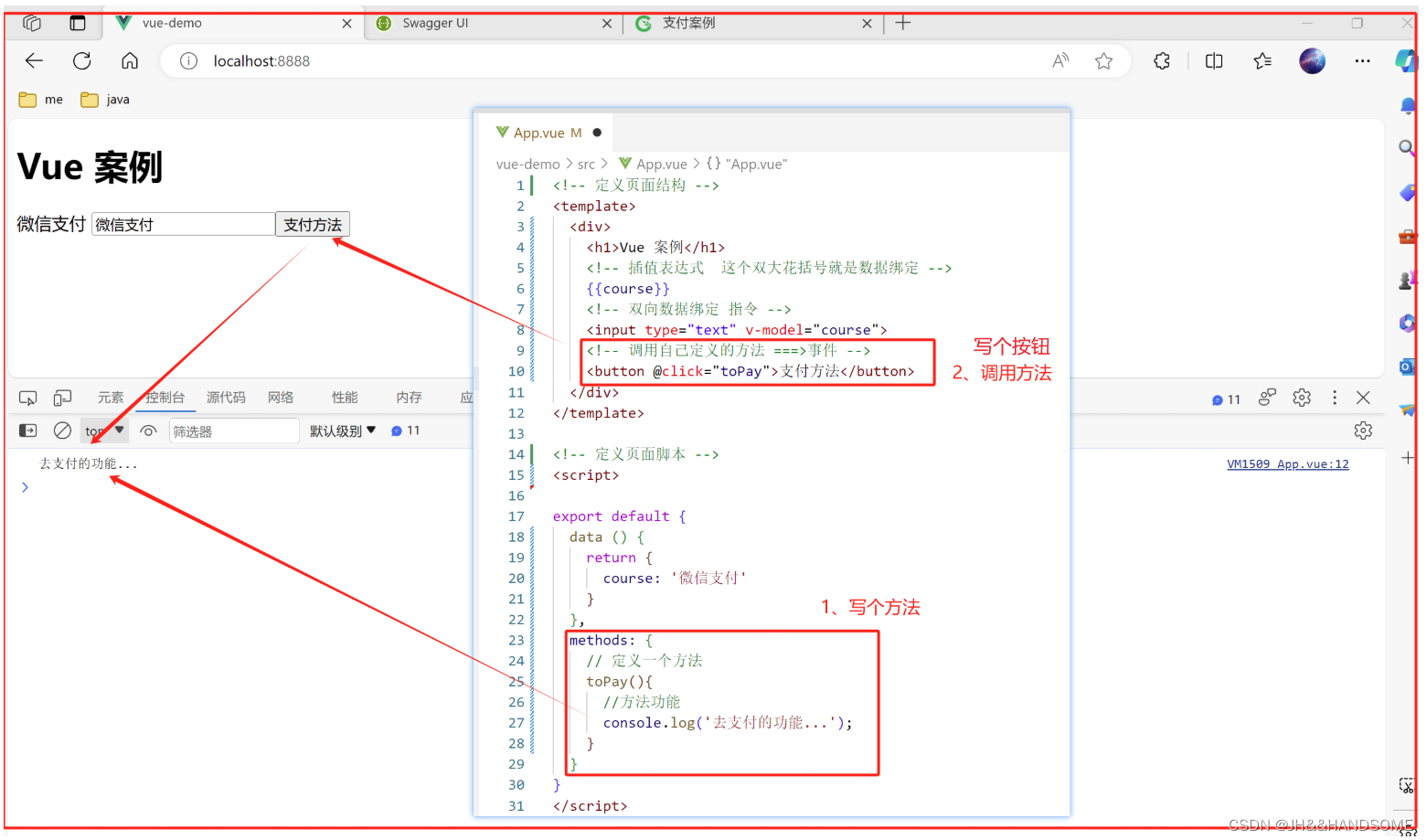
01、SpringBoot + MyBaits-Plus 集成微信支付 -->项目搭建
目录 SpringBoot MyBaits-Plus 集成微信支付 之 项目搭建1、创建boot项目2、引入Swagger作用:2-1、引入依赖2-2、写配置文件进行测试2-3、访问Swagger页面2-4、注解优化显示 3、定义统一结果作用:3-1、引入lombok依赖3-2、写个统一结果的类-->RR类的…...
Linux 性能调优之网络优化
写在前面 考试整理相关笔记分享一些 Linux 中网络内核参数调优的笔记理解不足小伙伴帮忙指正 对每个人而言,真正的职责只有一个:找到自我。然后在心中坚守其一生,全心全意,永不停息。所有其它的路都是不完整的,是人的逃…...

RT-Thread系统使用常见问题处理记录
1.使用telnet连接系统时发送help指令显示不全的问题。 原因:telnet发送缓存太小。 解决办法:更改agile_telnet软件包里Set agile_telnet tx buffer size的大小。 2.使用Paho MQTT软件包过一段时间报错hard fault on thread: mqtt0 解决办法࿱…...
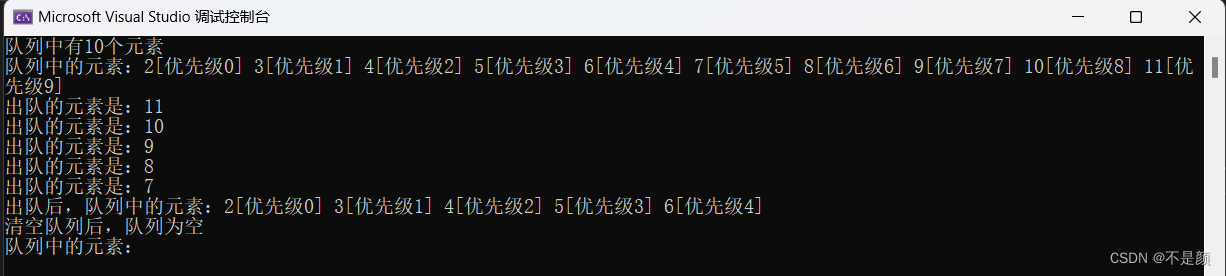
优先队列----数据结构
概念 不知道你玩过英雄联盟吗?英雄联盟里面的防御塔会攻击离自己最近的小兵,但是如果有炮车兵在塔内,防御塔会优先攻击炮车(因为炮车的威胁性更大),只有没有兵线在塔内时,防御塔才会攻击英雄。…...
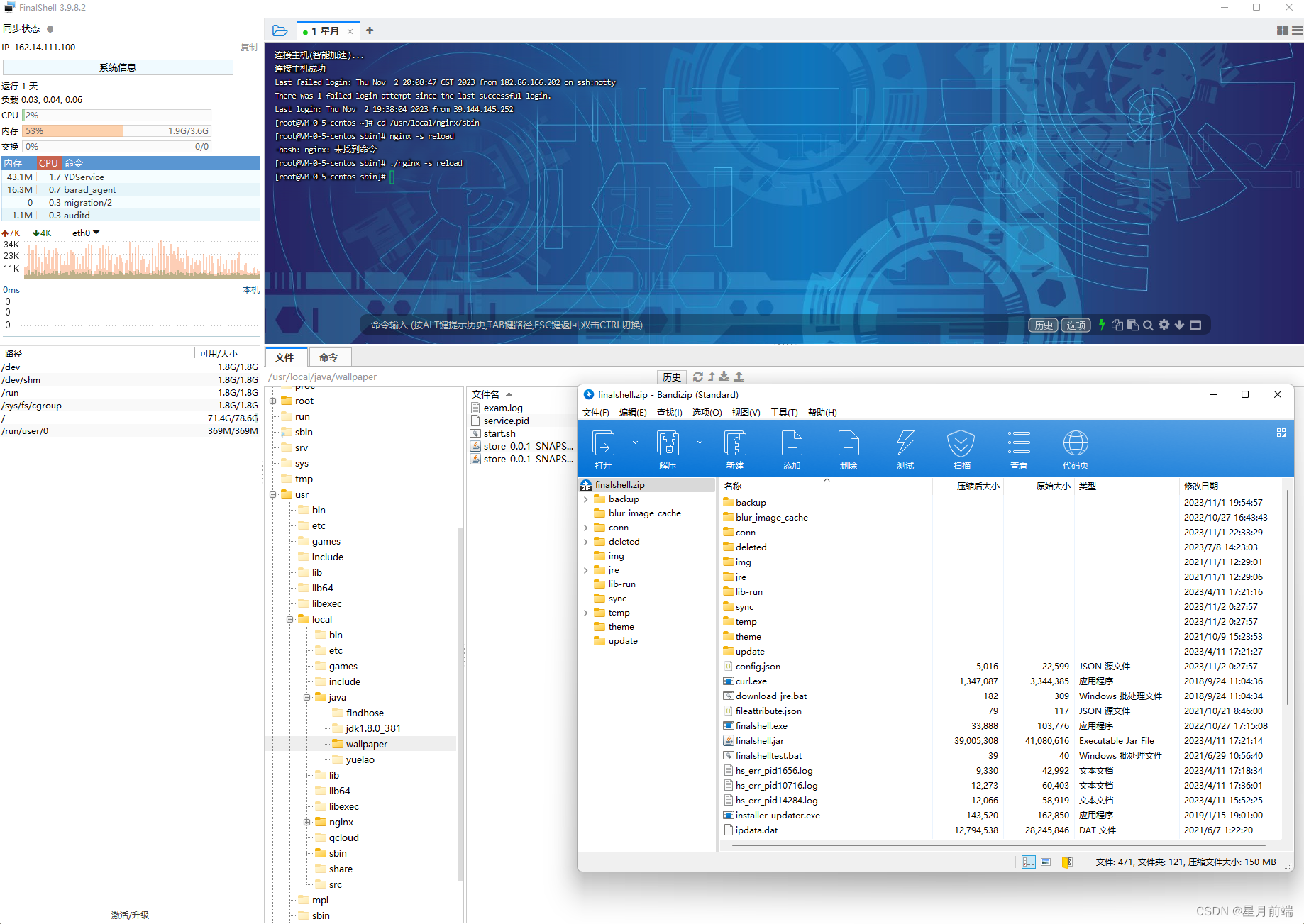
nginx项目部署教程
nginx项目部署教程 1. 项目部署介绍 当我们的项目开发完毕后,我们需要将项目打包、部署到服务器上,供用户来使用。 目前,常见的部署方式有两种: 后端部署 前后端分离部署 1-1 后端部署 这是最古老的部署方式,也是…...

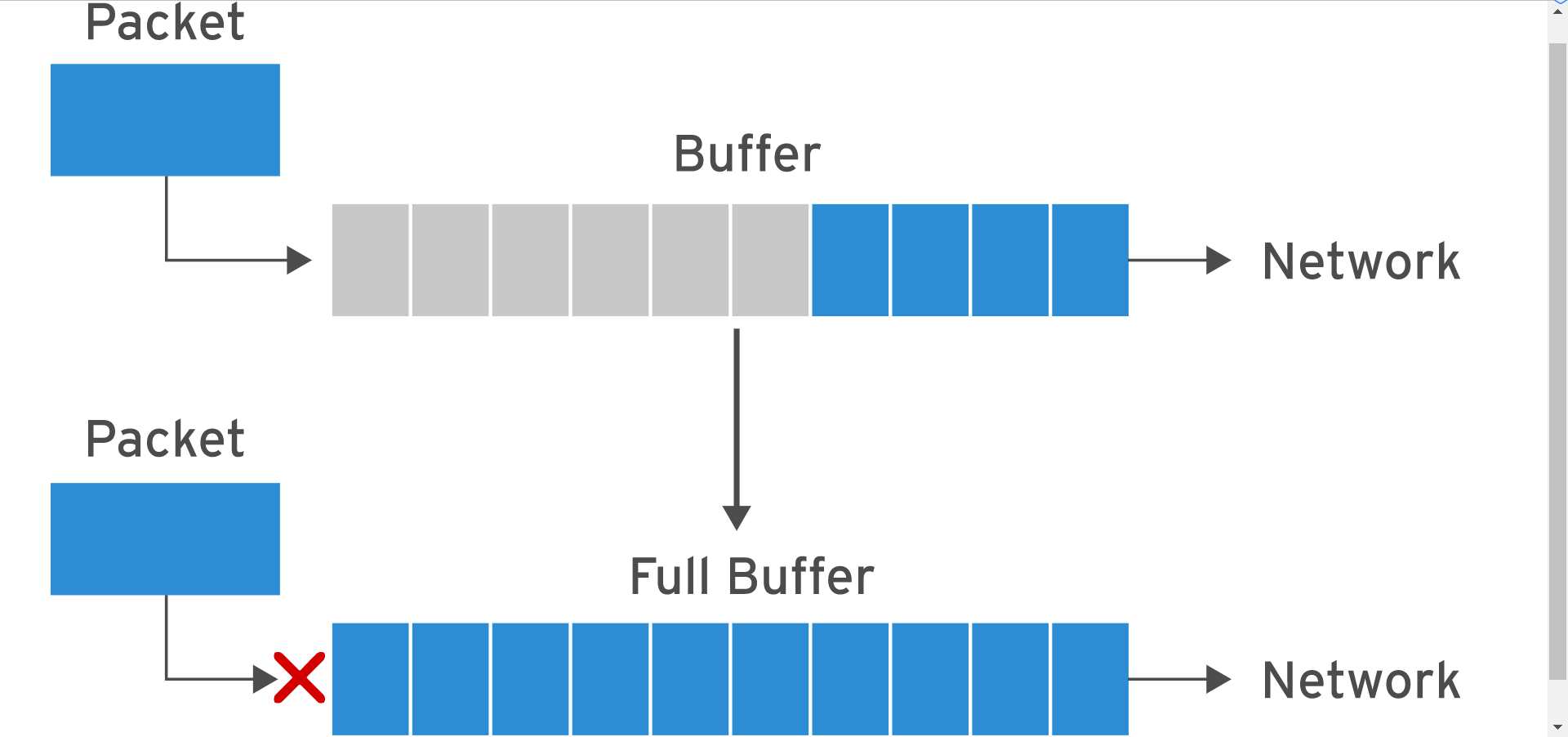
资源限流 + 本地分布式多重锁——高并发性能挡板,隔绝无效流量请求
前言 在高并发分布式下,我们往往采用分布式锁去维护一个同步互斥的业务需求,但是大家细想一下,在一些高TPS的业务场景下,让这些请求全部卡在获取分布式锁,这会造成什么问题? 瞬时高并发压垮系统 众所周知…...

day52【子序列】300.最长递归子序列 674.最长连续递增序列 718.最长重复子数组
文章目录 300.最长递增子序列674.最长连续递增序列718.最长重复子数组 300.最长递增子序列 题目链接:力扣链接 讲解链接:代码随想录链接 题意:给你一个整数数组 nums ,找到其中最长严格递增子序列的长度。 子序列 是由数组派生而…...

计算机视觉 计算机视觉识别是什么?
计算机视觉识别(Computer Vision Recognition)是计算机科学和人工智能领域中的一个重要分支,它致力于使计算机系统能够模拟和理解人类视觉的过程,从而能够自动识别、分析和理解图像或视频中的内容。这一领域的发展旨在让计算机具备…...
Make.com实现多个APP应用的自动化的入门指南
Make.com是一款基于云的自动化平台,可帮助用户将多个应用程序连接在一起,并通过设置自动化流程来简化日常任务。Make.com提供丰富的API集成,支持连接各种流行的应用程序,包括社交媒体、电子商务、CRM等。 使用Make.com实现多个AP…...
的简介、原理、性能、实现步骤、案例应用之详细攻略)
LLMs之HFKR:HFKR(基于大语言模型实现异构知识融合的推荐算法)的简介、原理、性能、实现步骤、案例应用之详细攻略
LLMs之HFKR:HFKR(基于大语言模型实现异构知识融合的推荐算法)的简介、原理、性能、实现步骤、案例应用之详细攻略 目录 HFKR的简介 异构知识融合:一种基于LLM的个性化推荐新方法...

多模态 多引擎 超融合 新生态!2023亚信科技AntDB数据库8.0产品发布
9月20日,以“多模态 多引擎 超融合 新生态”为主题的亚信科技AntDB数据库8.0产品发布会成功举办,从技术和生态两个角度全方位展示了AntDB数据库第8次大型能力升级和生态建设成果。浙江移动、用友、麒麟软件、华录高诚、金云智联等行业伙伴及业界专家共同…...

MLP-Mixer真的比CNN简单吗?深入拆解它的计算开销与内存瓶颈
MLP-Mixer真的比CNN简单吗?深入拆解它的计算开销与内存瓶颈 当谷歌研究院在2021年提出MLP-Mixer架构时,整个计算机视觉社区都为它的极简设计感到惊艳——没有注意力机制、没有卷积操作,仅用多层感知机(MLP)就实现了媲…...

如何高效下载AnyFlip电子书:一键转换为PDF的完整指南
如何高效下载AnyFlip电子书:一键转换为PDF的完整指南 【免费下载链接】anyflip-downloader Download anyflip books as PDF 项目地址: https://gitcode.com/gh_mirrors/an/anyflip-downloader 你是否曾在AnyFlip上找到一本精彩的电子书,想要永久保…...

从“杯子放球”到“射击命中”:用Python模拟帮你彻底搞懂离散随机变量
从“杯子放球”到“射击命中”:用Python模拟帮你彻底搞懂离散随机变量 概率论中的离散随机变量概念常常让初学者感到抽象难懂。传统的数学推导虽然严谨,但缺乏直观性。本文将带你用Python代码亲手模拟几个经典概率问题,通过可视化手段让这些概…...

GD32F103 DAC输出不稳?排查DMA传输和定时器触发的5个常见坑点
GD32F103 DAC输出不稳?排查DMA传输和定时器触发的5个常见坑点 在嵌入式开发中,DAC(数字模拟转换器)的稳定输出对许多应用至关重要。然而,当使用GD32F103的DAC功能时,开发者常常会遇到输出波形不稳定、数据错…...

如何用AntiMicroX解决PC游戏手柄兼容问题:5分钟快速上手终极手柄映射工具
如何用AntiMicroX解决PC游戏手柄兼容问题:5分钟快速上手终极手柄映射工具 【免费下载链接】antimicrox Graphical program used to map keyboard buttons and mouse controls to a gamepad. Useful for playing games with no gamepad support. 项目地址: https:/…...

手把手教你用J-Link调试STM32:从20针接口定义到SWD最小系统连接实战
嵌入式开发实战:J-Link与STM32的SWD高效调试指南 第一次接触J-Link调试器时,面对20针接口上密密麻麻的引脚,不少开发者都会感到无从下手。实际上,现代ARM Cortex-M系列芯片的调试已经变得异常简单——只需要SWD协议下的三根线&am…...

DeepSeek LeetCode 2509.查询树中环的长度 C语言实现
题目分析这道题的关键在于理解完全二叉树的编号规律:节点 val 的父节点是 val / 2(整数除法)。当在两个节点间添加一条边时,形成的环长度等于两节点到其最近公共祖先(LCA)的路径边数之和,再加 1…...
:基于127万条真实英文语境的搭配强度阈值模型首次公开)
Perplexity词组搭配查询深度解析(工业级语料验证版):基于127万条真实英文语境的搭配强度阈值模型首次公开
更多请点击: https://codechina.net 第一章:Perplexity词组搭配查询深度解析(工业级语料验证版):基于127万条真实英文语境的搭配强度阈值模型首次公开 Perplexity 不仅是语言模型评估的核心指标,更可转化为…...

云原生安全新思路:基于DPU智能网卡的IPsec卸载实战,为K8s节点通信加密‘减负’
云原生安全新思路:基于DPU智能网卡的IPsec卸载实战 在Kubernetes集群中,节点间的网络通信安全一直是DevOps团队关注的焦点。传统IPsec加密方案虽然能有效保护数据传输,却不可避免地消耗大量主机CPU资源。当集群规模扩大时,这种加密…...
】)
【Rust + Tauri 2 + TypeScript + Tailwind CSS 4 桌面应用 UI 组件选型深度对比(2026版)】
摘要:随着 Tauri 2 在桌面应用开发领域的快速崛起,开发者面临着一个关键抉择:如何在前端选择最适合的 UI 组件库?本文基于 2026 年最新生态,对 shadcn/ui、Radix UI、Base UI、Mantine、Ant Design、Chakra UI、Headle…...