1-2 非阻塞延时实现LED闪烁功能(累计定时中断次数)--多路软件定时器的功能实现
单路
#include <reg51.h>
#include "delay.h"#define LED_SHINE_TIME 1000//1sunsigned int g_u16_timer_cnt;//在定时器的基础上进行计数
unsigned char g_u8_time_flag;//时间到的标志
unsigned char g_u8_timer_soft_enable;//定时器的软件开关sbit LED0=P1^0;
sbit LED1=P1^1;void Timer0Init(void); //1毫秒@12.000MHzvoid main()
{g_u16_timer_cnt=LED_SHINE_TIME;g_u8_timer_soft_enable=1;g_u8_time_flag=0;Timer0Init();while(1){if(g_u8_time_flag==1){g_u8_time_flag=0;LED0=~LED0;g_u16_timer_cnt=LED_SHINE_TIME;}}
}//中断服务函数
void timer0_isr() interrupt 1
{TR0=0;//关定时器if(g_u8_timer_soft_enable){g_u16_timer_cnt--;if(!g_u16_timer_cnt){g_u8_time_flag=1;//代表软件的定时时间到}}TL0 = 0x18; //设置定时初始值TH0 = 0xFC; //设置定时初始值TR0=1;//开定时器
}//定时器的初始化
void Timer0Init(void) //1毫秒@12.000MHz
{AUXR &= 0x7F; //定时器时钟12T模式TMOD &= 0xF0; //设置定时器模式TL0 = 0x18; //设置定时初始值TH0 = 0xFC; //设置定时初始值TF0 = 0; //清除TF0标志ET0=1;EA=1;TR0 = 1; //定时器0开始计时
}
多路
#include <reg51.h>
#include "delay.h"#define LED1_SHINE_TIME 1000//1s
#define LED2_SHINE_TIME 2000//2sunsigned int g_u16_timer1_cnt;//在定时器的基础上进行计数
unsigned char g_u8_time1_flag;//时间到的标志
unsigned char g_u8_timer1_soft_enable;//定时器的软件开关unsigned int g_u16_timer2_cnt;//在定时器的基础上进行计数
unsigned char g_u8_time2_flag;//时间到的标志
unsigned char g_u8_timer2_soft_enable;//定时器的软件开关sbit LED1=P1^0;
sbit LED2=P1^1;void Timer0Init(void); //1毫秒@12.000MHzvoid main()
{g_u16_timer1_cnt=LED1_SHINE_TIME;g_u8_timer1_soft_enable=1;g_u8_time1_flag=0;g_u16_timer2_cnt=LED2_SHINE_TIME;g_u8_timer2_soft_enable=1;g_u8_time2_flag=0;Timer0Init();while(1){//LED1if(g_u8_time1_flag==1){g_u8_time1_flag=0;LED1=~LED1;g_u16_timer1_cnt=LED1_SHINE_TIME;}//LED2if(g_u8_time2_flag==1){g_u8_time2_flag=0;LED2=~LED2;g_u16_timer2_cnt=LED2_SHINE_TIME;}}
}//中断服务函数
void timer0_isr() interrupt 1
{TR0=0;//关定时器//LED1if(g_u8_timer1_soft_enable){g_u16_timer1_cnt--;if(!g_u16_timer1_cnt){g_u8_time1_flag=1;//代表软件的定时时间到}}//LED2if(g_u8_timer2_soft_enable){g_u16_timer2_cnt--;if(!g_u16_timer2_cnt){g_u8_time2_flag=1;//代表软件的定时时间到}}TL0 = 0x18; //设置定时初始值TH0 = 0xFC; //设置定时初始值TR0=1;//开定时器
}//定时器的初始化
void Timer0Init(void) //1毫秒@12.000MHz
{AUXR &= 0x7F; //定时器时钟12T模式TMOD &= 0xF0; //设置定时器模式TL0 = 0x18; //设置定时初始值TH0 = 0xFC; //设置定时初始值TF0 = 0; //清除TF0标志ET0=1;EA=1;TR0 = 1; //定时器0开始计时
}
省略软件开关标志,优化代码,节省空间
#include <reg51.h>
#include "delay.h"#define LED1_SHINE_TIME 1000//1s
#define LED2_SHINE_TIME 2000//2sunsigned int g_u16_timer1_cnt;//在定时器的基础上进行计数
unsigned char g_u8_time1_flag;//时间到的标志
//unsigned char g_u8_timer1_soft_enable;//定时器的软件开关unsigned int g_u16_timer2_cnt;//在定时器的基础上进行计数
unsigned char g_u8_time2_flag;//时间到的标志
//unsigned char g_u8_timer2_soft_enable;//定时器的软件开关sbit LED1=P1^0;
sbit LED2=P1^1;void Timer0Init(void); //1毫秒@12.000MHzvoid main()
{g_u16_timer1_cnt=LED1_SHINE_TIME;//g_u8_timer1_soft_enable=1;g_u8_time1_flag=0;g_u16_timer2_cnt=LED2_SHINE_TIME;//g_u8_timer2_soft_enable=1;g_u8_time2_flag=0;Timer0Init();while(1){//LED1if(g_u8_time1_flag==1){g_u8_time1_flag=0;LED1=~LED1;g_u16_timer1_cnt=LED1_SHINE_TIME;}//LED2if(g_u8_time2_flag==1){g_u8_time2_flag=0;LED2=~LED2;g_u16_timer2_cnt=LED2_SHINE_TIME;}}
}//中断服务函数
void timer0_isr() interrupt 1
{TR0=0;//关定时器//LED1if(g_u16_timer1_cnt){g_u16_timer1_cnt--;if(!g_u16_timer1_cnt){g_u8_time1_flag=1;//代表软件的定时时间到}}//LED2if(g_u16_timer2_cnt){g_u16_timer2_cnt--;if(!g_u16_timer2_cnt){g_u8_time2_flag=1;//代表软件的定时时间到}}TL0 = 0x18; //设置定时初始值TH0 = 0xFC; //设置定时初始值TR0=1;//开定时器
}//定时器的初始化
void Timer0Init(void) //1毫秒@12.000MHz
{AUXR &= 0x7F; //定时器时钟12T模式TMOD &= 0xF0; //设置定时器模式TL0 = 0x18; //设置定时初始值TH0 = 0xFC; //设置定时初始值TF0 = 0; //清除TF0标志ET0=1;EA=1;TR0 = 1; //定时器0开始计时
}
硬件定时器不够的时候可以用这种软件定时器的方法,如果不需要哪个软件计时器,设成0即可
这里用的定时计数器,所以定时时间比较准确
相关文章:
--多路软件定时器的功能实现)
1-2 非阻塞延时实现LED闪烁功能(累计定时中断次数)--多路软件定时器的功能实现
单路 #include <reg51.h> #include "delay.h"#define LED_SHINE_TIME 1000//1sunsigned int g_u16_timer_cnt;//在定时器的基础上进行计数 unsigned char g_u8_time_flag;//时间到的标志 unsigned char g_u8_timer_soft_enable;//定时器的软件开关sbit LED0P1…...

数据类型及强制转换
数据类型范围(基本) 数据类型占内存字节数表示范围数量级char(signed char)1-128~1272unsigned char10~2552short int(signed short int)2-32,768~32,7674unsigned short int20~65,5354int(sig…...

Python----高阶函数
高阶函数:把函数作为参数传入,这样的函数称为高阶函数,高阶函数是函数式编程的体现。函数式编程就是指这种高度抽象的编程范式。 高阶函数的由来 在Python中,abs()函数可以完成对数字求绝对值计算。 ① 正数的绝对值是它本身 ②…...

Unity地面交互效果——6、地形动态顶点置换和曲面细分
回到目录 Unity置换贴图局部距离曲面细分 大家好,我是阿赵。 这篇文章是我无聊的时候做了一个demo,觉得挺有趣,于是就发上来。这里面包含了4个内容:置换贴图、顶点偏移、局部曲面细分,曲面细分按距离调整强度。 …...
)
Linux系统服务之一次性服务(2)
接前一篇文章:Linux系统服务之一次性服务(1) 本文内容参考以下文章: Systemd OneShot 系统启动时运行一次特定的命令或脚本,并在执行完毕后自动退出-CSDN博客 oneshot一次性服务_typeoneshot-CSDN博客 systemd.serv…...

Vue项目解决van-calendar 显示白色空白,需滑动一下屏幕,才可正常显示
问题描述,如图 ipad(平板)或者 H5移动端引入Vant组件的日历组件(van-calendar),初始化显示空白,需滚动一下屏幕,才可正常显示 解决方法 需在van-calendar上绑定open"openCalendar"事件…...
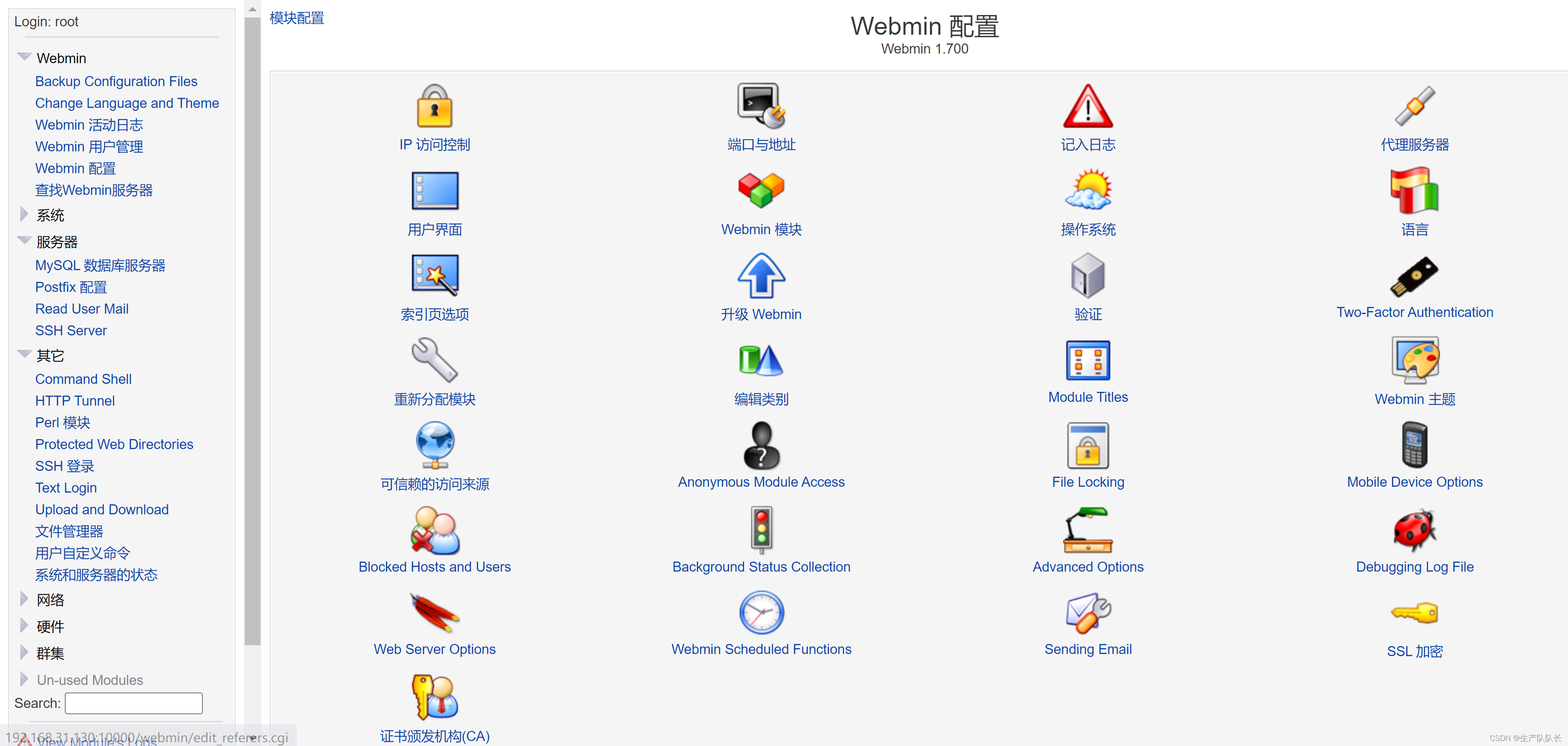
Linux:可视化管理工具Webmin的安装
一、下载 地址:Webmin官网 我这里下载的是1.700-1版本 二、安装 1、在虚拟机上新建目录并安装软件 mkdir /opt/webmin rpm -ivh webmin-1.700-1.noarch.rpm2、修改webmin的root密码 /usr/libexec/webmin/changepass.pl /etc/webmin root 1234563、修改端口(可…...
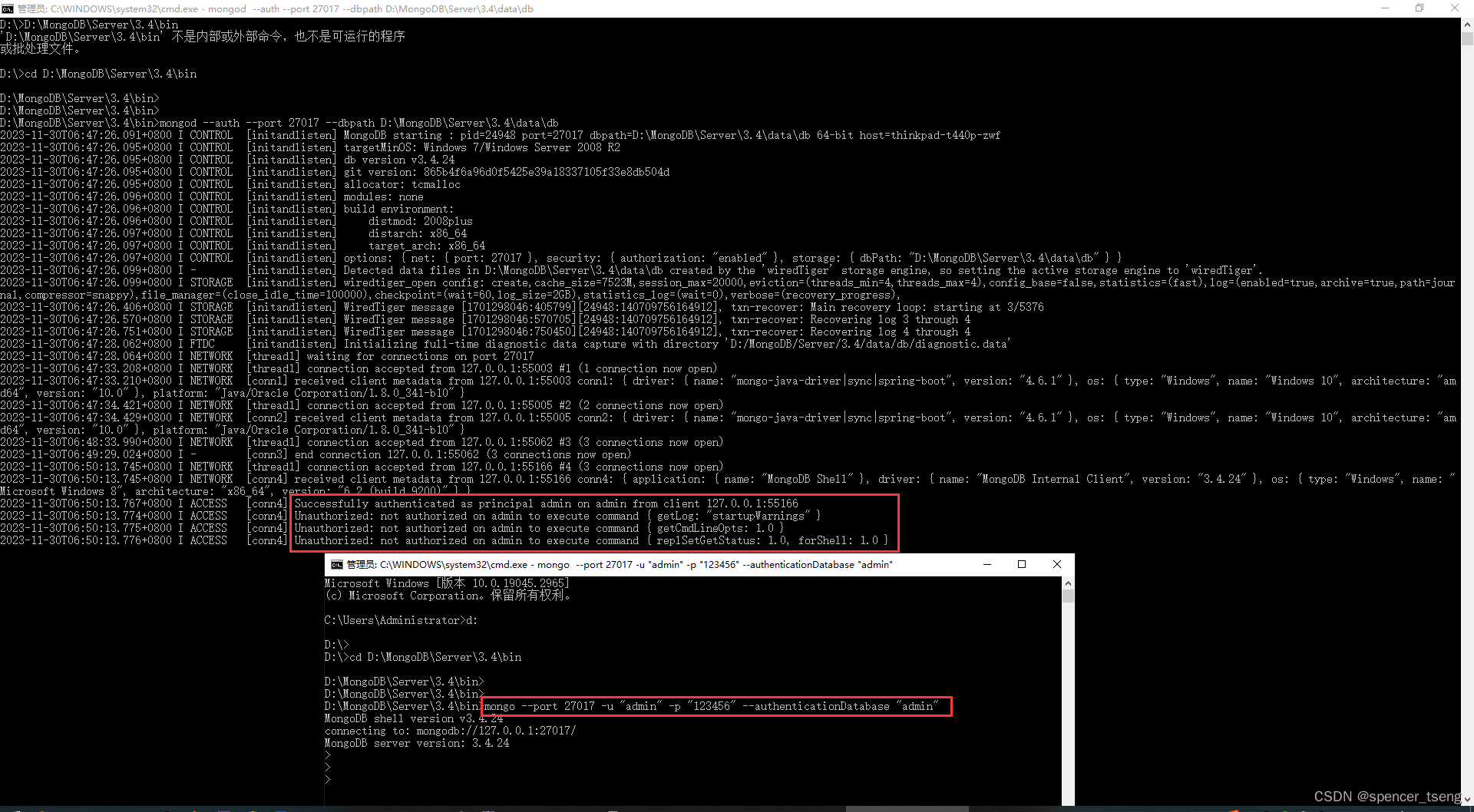
WARNING: Access control is not enabled for the database.
MongoDB shell version v3.4.24 WARNING: Access control is not enabled for the database. Read and write access to data and configuration is unrestricted. 1)未启用访问控制 2)读写访问不受限制 D:\MongoDB\Server\3.4\bin>mongo MongoDB shell version v3.4.24 c…...
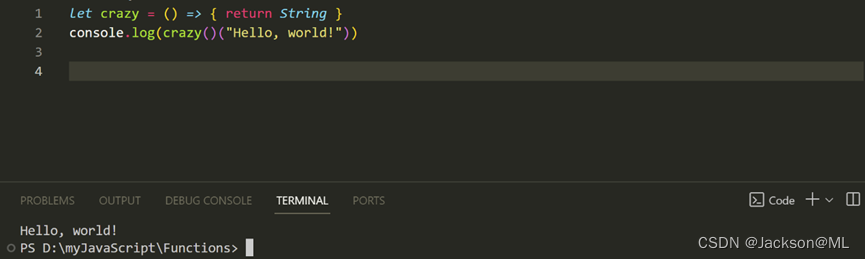
JavaScript编程进阶 – Return语句
JavaScript编程进阶 – Return语句 JavaScript Programming Advanced – Return Statement By JacksonML 就像人们习惯的函数一样,总觉得在函数体最后需要一个return语句,标志着函数的结束,就像下面这个函数 theFunc() 那样。 function theFunc() { re…...

Python与设计模式--备忘录模式
23种计模式之 前言 (5)单例模式、工厂模式、简单工厂模式、抽象工厂模式、建造者模式、原型模式、(7)代理模式、装饰器模式、适配器模式、门面模式、组合模式、享元模式、桥梁模式、(11)策略模式、责任链模式、命令模式、中介者模…...

04_Flutter自定义Slider滑块
04_Flutter自定义Slider滑块 一.Slider控件基本用法 Column(mainAxisAlignment: MainAxisAlignment.start,children: <Widget>[Text("sliderValue: ${_sliderValue.toInt()}"),Slider(value: _sliderValue,min: 0,max: 100,divisions: 10,thumbColor: Colors.…...

服务器数据恢复—EMC存储raid5故障导致上层应用崩溃的数据恢复案例
服务器存储数据恢复环境: EMC某型号存储,8块组建一组raid5磁盘阵列。上层操作系统采用zfs文件系统。 服务器存储故障&分析: raid5阵列中有2块硬盘未知原因离线,raid5阵列崩溃,上层应用无法正常使用。 服务器数据恢…...
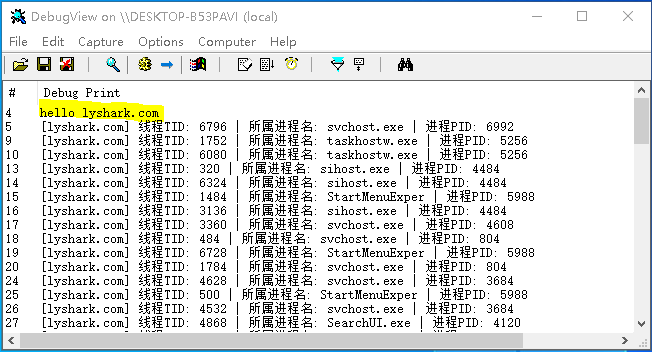
7.1 Windows驱动开发:内核监控进程与线程回调
在前面的文章中LyShark一直在重复的实现对系统底层模块的枚举,今天我们将展开一个新的话题,内核监控,我们以监控进程线程创建为例,在Win10系统中监控进程与线程可以使用微软提供给我们的两个新函数来实现,此类函数的原…...
基于ssm的汽车论坛管理系统设计与实现
基于ssm的汽车论坛管理系统设计与实现 摘要:信息化社会内需要与之针对性的信息获取途径,但是途径的扩展基本上为人们所努力的方向,由于站在的角度存在偏差,人们经常能够获得不同类型信息,这也是技术最为难以攻克的课题…...
)
实习开发日志经验总结(一)
文章目录 前言实习日志经验总结 前言 自己之前实习过程中遇到的问题以及相应的解决过程,我都有记录形成比较凌乱的实习日志。故想在整个实习日志的基础上,提炼一些技术知识点或者是解决问题的思路。考虑到实习项目的不方便公开性,所以会隐去…...

【Unity基础】8.简单场景的搭建
【Unity基础】8.简单场景的搭建 大家好,我是Lampard~~ 欢迎来到Unity基础系列博客,所学知识来自B站阿发老师~感谢 (一)场景资源 (1)Import资源包 今天我们将手动去搭一个简单的场景,当…...
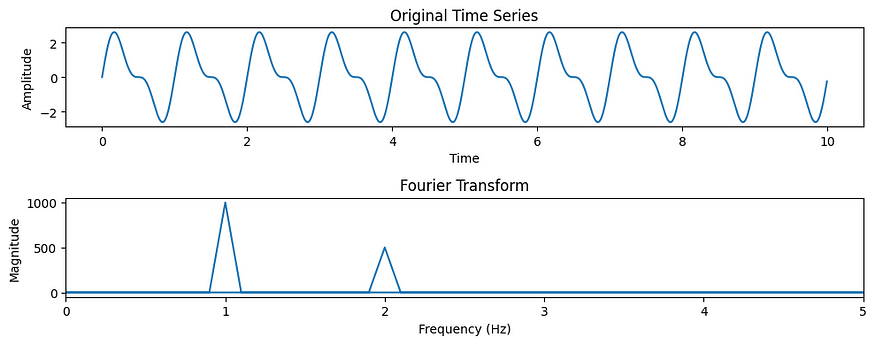
傅里叶变换及其在机器学习中的应用
一、介绍 傅立叶变换是一种数学技术,在各个科学和工程领域发挥着关键作用,其应用范围从信号处理到量子力学。近年来,它在机器学习领域发现了新的意义。本文探讨了傅里叶变换的基础知识及其在机器学习应用中日益增长的重要性。 …...

xorm源码学习
文章目录 XORM源码浅析及实践ORMORM vs. SQLXORM软件架构 ORM 引擎 Engine——DBM*core.DB Golang:database/sql 源码基本结构连接复用,提高性能。增加数据库连接池数量连接管理 database/sql主要内容:sql.DB创建数据库连接sql.Open()DB.conn…...

Vue3中的<script setup>和<script>的区别
相同点 在一个 Vue3 单文件组件 (SFC)中,<script setup> 和 <script> 它们各自最多只能存在一个。 不同点 <script setup> 这个脚本块将被预处理为组件的 setup() 函数,这意味着它将为每一个(也可以说每一次)组件实例都执行。 <…...
)
Docker笔记-Docker搭建最新版zabbix服务端(2023-07-31)
前言 一开始问chartgpt上,搭建的思路是对的,但命令和细节有问题,最后还是依靠StackOverflow解决的。一开始在amd的linux上搭建好docker版的zabbix,但放到arm的机器上就报错了,原因是指令集不匹配,最后跑到…...

如何通过Equalizer APO实现Windows系统级音频均衡器专业调校:从快速上手到高级校准的完整指南
如何通过Equalizer APO实现Windows系统级音频均衡器专业调校:从快速上手到高级校准的完整指南 【免费下载链接】equalizerapo Equalizer APO mirror 项目地址: https://gitcode.com/gh_mirrors/eq/equalizerapo Equalizer APO是一款功能强大的Windows系统级开…...

淘金币自动化脚本终极指南:5分钟解放双手,轻松获取每日奖励
淘金币自动化脚本终极指南:5分钟解放双手,轻松获取每日奖励 【免费下载链接】taojinbi 淘宝淘金币自动执行脚本,包含蚂蚁森林收取能量,芭芭农场全任务,解放你的双手 项目地址: https://gitcode.com/gh_mirrors/ta/ta…...

全方位防护矿山开采三维透明化智能安全防控整体方案
依托黎阳之光核心技术矿山开采三维透明化智能安全防控整体方案一、方案前言1.建设背景矿山开采井下巷道错综复杂、采掘工作面地质隐蔽,顶板、透水、瓦斯、边坡失稳、三违作业、设备故障为高发安全风险。传统二维监控、分散监测系统存在场景碎片化、地质不可视、风险…...

微信4.0.3.22防撤回技术原理与安全Hook实践
1. 这不是“破解”,而是对微信消息机制的一次技术复盘 很多人看到标题里的“防撤回”三个字,第一反应是“又要搞黑产工具了?”——其实完全不是。我做这个分析的初衷,非常朴素:去年带一个校园小程序团队时,…...

张量网络MPS/MPO求解粘性Burgers方程:突破CFD维度灾难的量子启发方法
1. 项目概述:当张量网络遇上流体方程在计算流体力学(CFD)领域,我们每天都在和维度灾难作斗争。想象一下,你要模拟一个三维湍流场,每个空间方向离散成100个点,时间再取100步,那么整个…...

Java + Spring Boot 操作 Kafka 完整学习指南
前置条件:ZooKeeper 集群 Kafka 集群已启动(3个ZK节点 3个Broker) Broker 地址:172.17.0.7:9092, 172.17.0.7:9093, 172.17.0.7:9094第一阶段:原生 Java API 操作 Kafka目的:理解底层原理,Spr…...

DeepMech:基于图神经网络与模板学习的化学反应机理预测框架
1. 项目概述与核心挑战 化学反应机理预测,简单来说,就是给定反应物,让计算机告诉我们这个反应具体是怎么一步步发生的。这就像看一部侦探电影,我们不仅要知道“谁是凶手”(最终产物),更想搞清楚…...

机器学习发现物理守恒量:从数据中挖掘对称性与不变性
1. 项目概述:当机器学习遇见物理学的“不变性”在物理学的世界里,对称性与守恒量是理解宇宙运行规律的基石。从牛顿时代起,我们就知道一个系统如果具有时间平移对称性,那么它的能量就是守恒的;如果具有空间平移对称性&…...
)
告别传统地形!用Unreal Engine的Voxel Plugin手把手教你做可破坏的无限世界(含动态NavMesh配置)
告别传统地形!用Unreal Engine的Voxel Plugin打造可破坏的无限世界在游戏开发领域,地形系统一直是构建虚拟世界的基石。传统Landscape系统虽然成熟稳定,但面对日益增长的玩家对交互性和自由度的需求,静态地形已经难以满足现代沙盒…...

JMeter WebSocket接口测试实战:从握手失败到万级压测
1. 为什么 WebSocket 测试不能只靠“点点点”——从一个线上告警说起上周五下午四点十七分,监控平台突然弹出三条红色告警:用户实时消息延迟超 3 秒、在线状态同步失败率陡升至 12%、某核心业务频道连接断开率在 5 分钟内从 0.03% 拉到 1.8%。运维同事第…...