6.如何利用LIO-SAM生成可用于机器人/无人机导航的二维/三维栅格地图--以octomap为例
目录
1 octomap的安装
2 二维导航节点的建立及栅格地图的构建
3 三维栅格地图的建立
1 octomap的安装
这里采用命令安装:
sudo apt install ros-melodic-octomap-msgs ros-melodic-octomap-ros ros-melodic-octomap-rviz-plugins ros-melodic-octomap-server
这样子就是安装好了。

2 二维导航节点的建立及栅格地图的构建
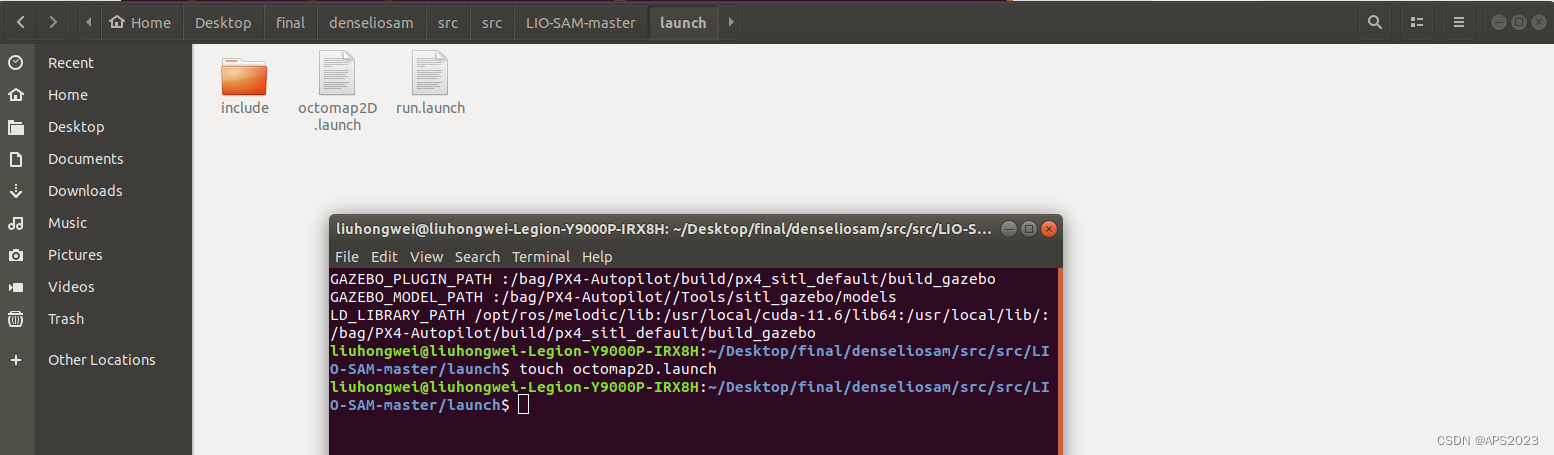
我们进入liosam的工作空间下的launch文件夹:
新建一个launch文件,就叫octomap2D.launch
将下面的内容粘贴其中:
<launch><node pkg="octomap_server" type="octomap_server_node" name="octomap_server"> <!--resolution in meters per pixel--><param name="resulution" value="0.6" /><!--name of the fixed frame,needs to be "/map" for SLAM--><param name="frame_id" type="string" value="/map" /><!--max range/depth resolution of the kinect meters--><param name="sensor_model/max_range" value="5.0" /><param name="latch" value="true" /><!--max/min height for occupancy map, should be in meters--><param name="pointcloud_max_z" value="5" /><param name="pointcloud_min_z" value="0" /><param name="graound_filter_angle" value="3.14" /><!--topic from where pointcloud2 messages are subscribed--><remap from="/cloud_in" to="/lio_sam/mapping/cloud_registered" /></node></launch>我来解释下各个参数的含义:
resolution:分辨率或精度,越小精度越高计算需要资源越庞大
frame_id:世界坐标系的话题,即圆点坐标系
sensor_model/max_range:扫描的最大距离
cloud_in:点云话题
pointcloud_max_z:最大的Z扫描值
pointcloud_min_z:最小的Z扫描值(激光雷达和垂直平面有一定距离)
当然,还有其他可选参数:
1.剔除地面点的
加上的话类似这样:
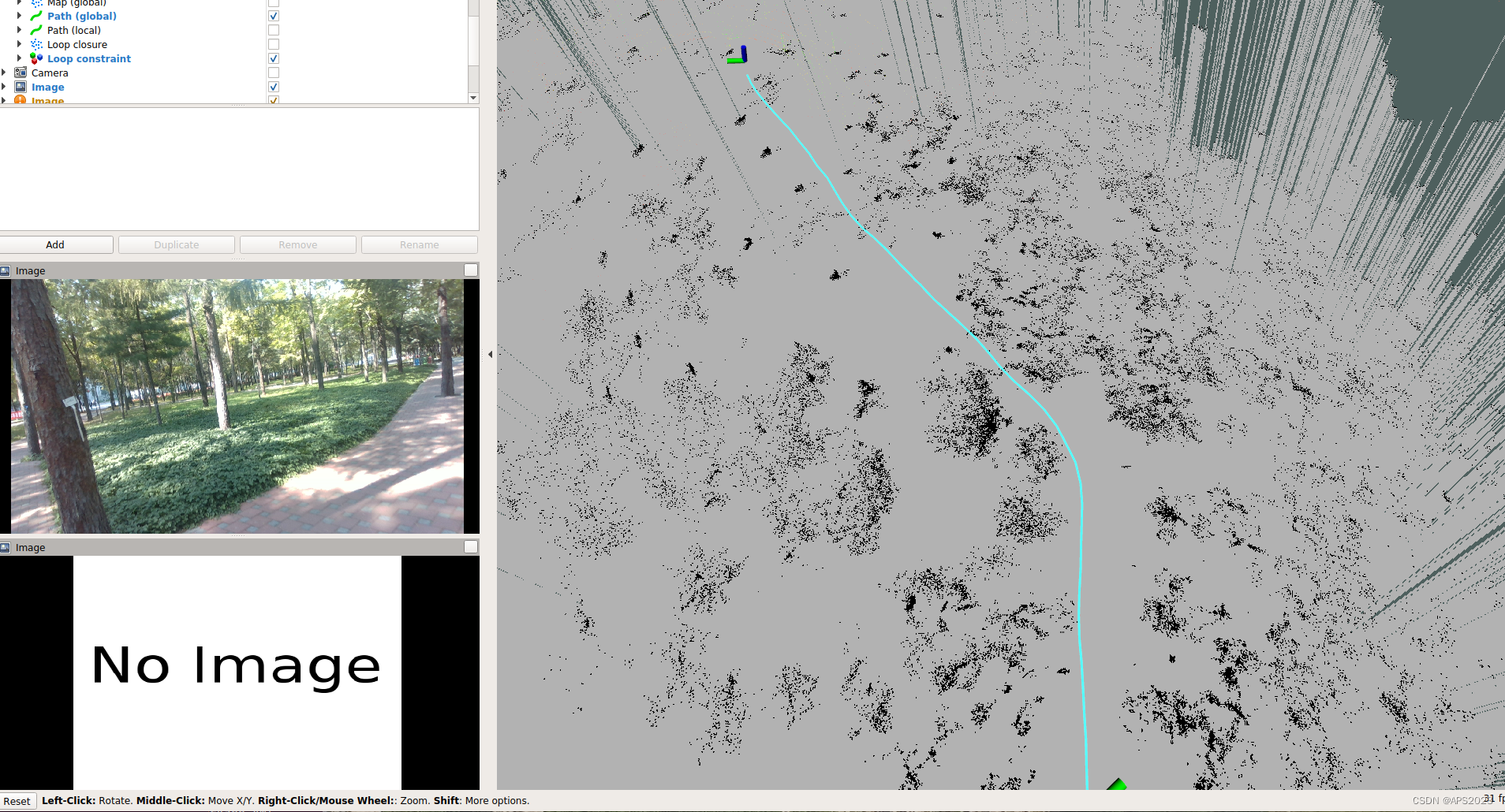
<launch><node pkg="octomap_server" type="octomap_server_node" name="octomap_server"> <!--resolution in meters per pixel--><param name="resulution" value="0.6" /><!--name of the fixed frame,needs to be "/map" for SLAM--><param name="frame_id" type="string" value="/map" /><!--max range/depth resolution of the kinect meters--><param name="sensor_model/max_range" value="1000.0" /><param name="latch" value="true" /><!--max/min height for occupancy map, should be in meters--><param name="pointcloud_max_z" value="5" /><param name="pointcloud_min_z" value="-1.5" /><param name="filter_ground" value="true" /><param name="ground_filter/distance" value="0.05" /><param name="ground_filter/angle" value="0.2" /><!--topic from where pointcloud2 messages are subscribed--><remap from="/cloud_in" to="/lio_sam/mapping/cloud_registered" /></node></launch>我们启动liosam主节点和本节点。
播放bag包:
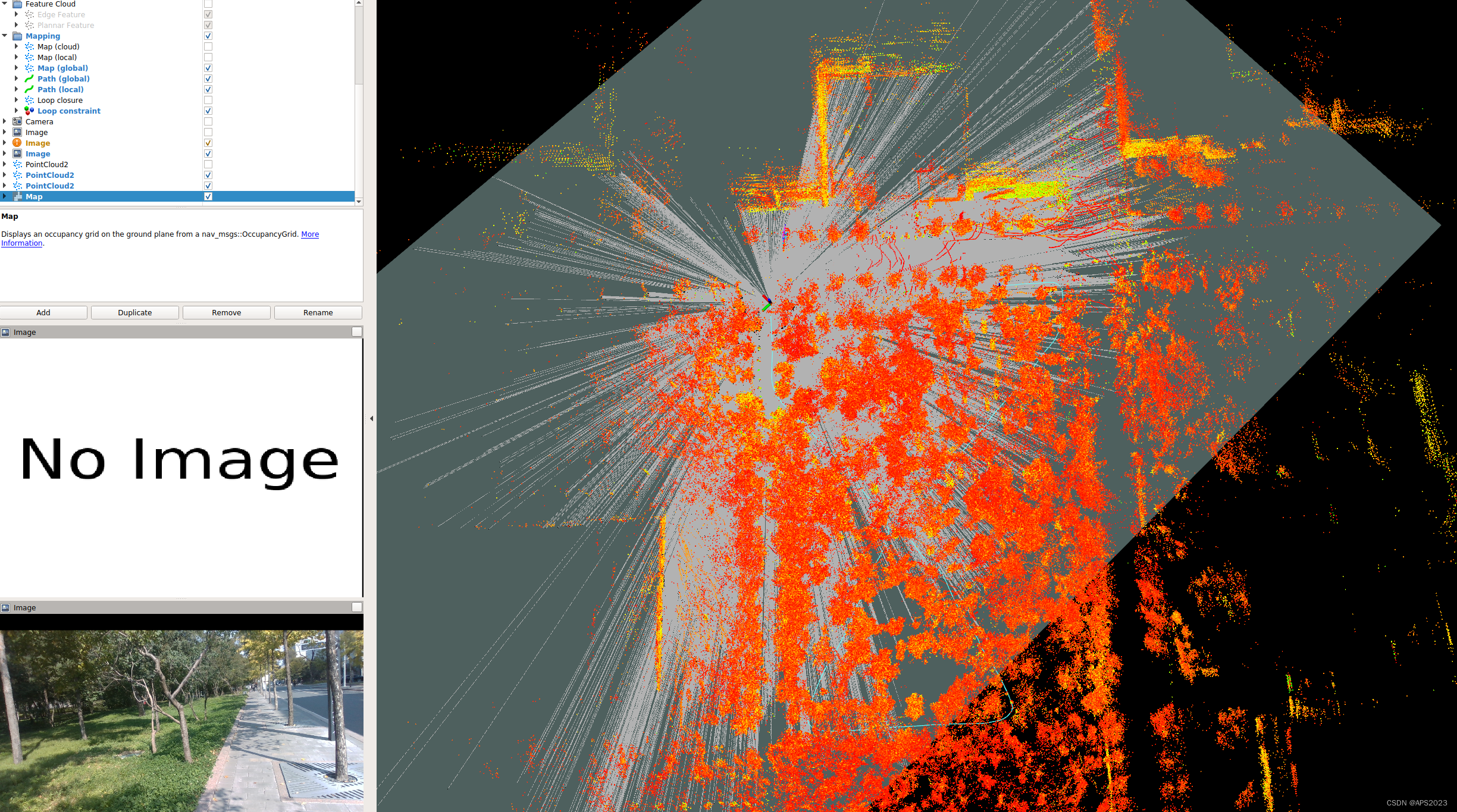
发现地面有很多噪点。调参...
好点了,继续调参。。
不停的调参后.....
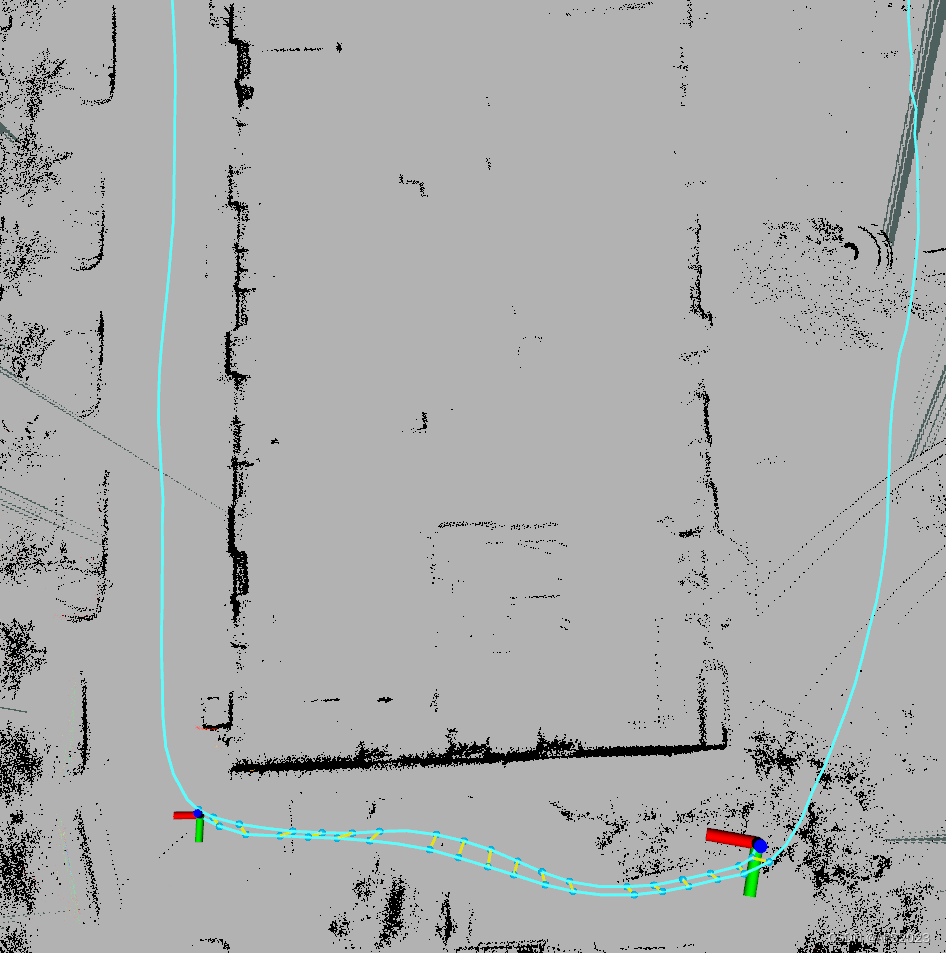
勉强可以用。。。因为我们手持的原因...
保存栅格地图:
rosrun map_server map_saver map:=/projected_map -f sbmap





3 三维栅格地图的建立
下载octomap_tutor并编译:
安装依赖:
sudo apt-get install liboctomap-dev octomap生成可执行文件pcd2octomap,记得一定要设置可执行,可以打开这个文件的属性看一看。
执行:
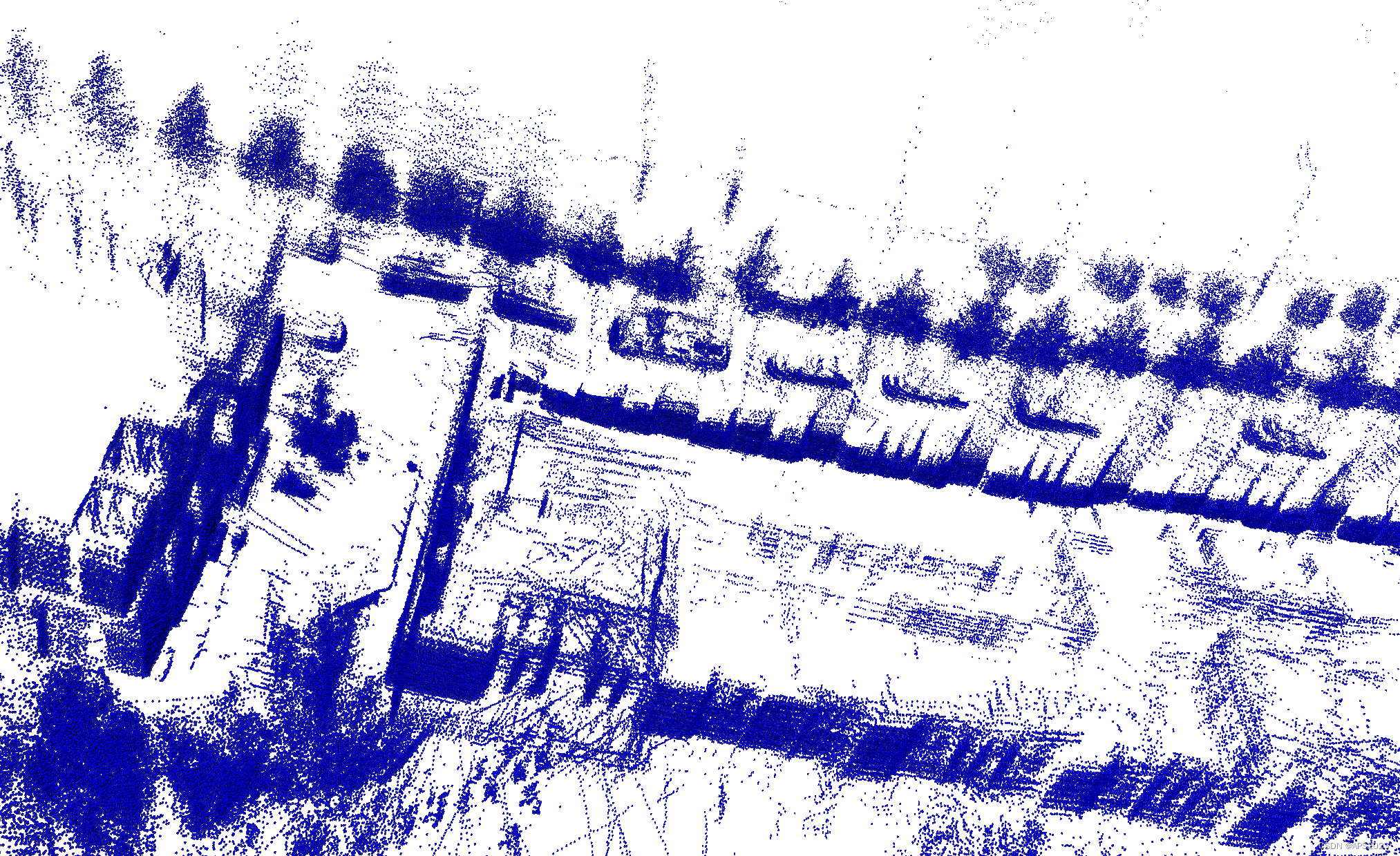
pcd2octomap carto_demo.pcd carto.bt
执行成功,发现八叉树文件:
查看地图:
octovis carto.bt
OK



相关文章:
6.如何利用LIO-SAM生成可用于机器人/无人机导航的二维/三维栅格地图--以octomap为例
目录 1 octomap的安装 2 二维导航节点的建立及栅格地图的构建 3 三维栅格地图的建立 1 octomap的安装 这里采用命令安装: sudo apt install ros-melodic-octomap-msgs ros-melodic-octomap-ros ros-melodic-octomap-rviz-plugins ros-melodic-octomap-server 这样…...
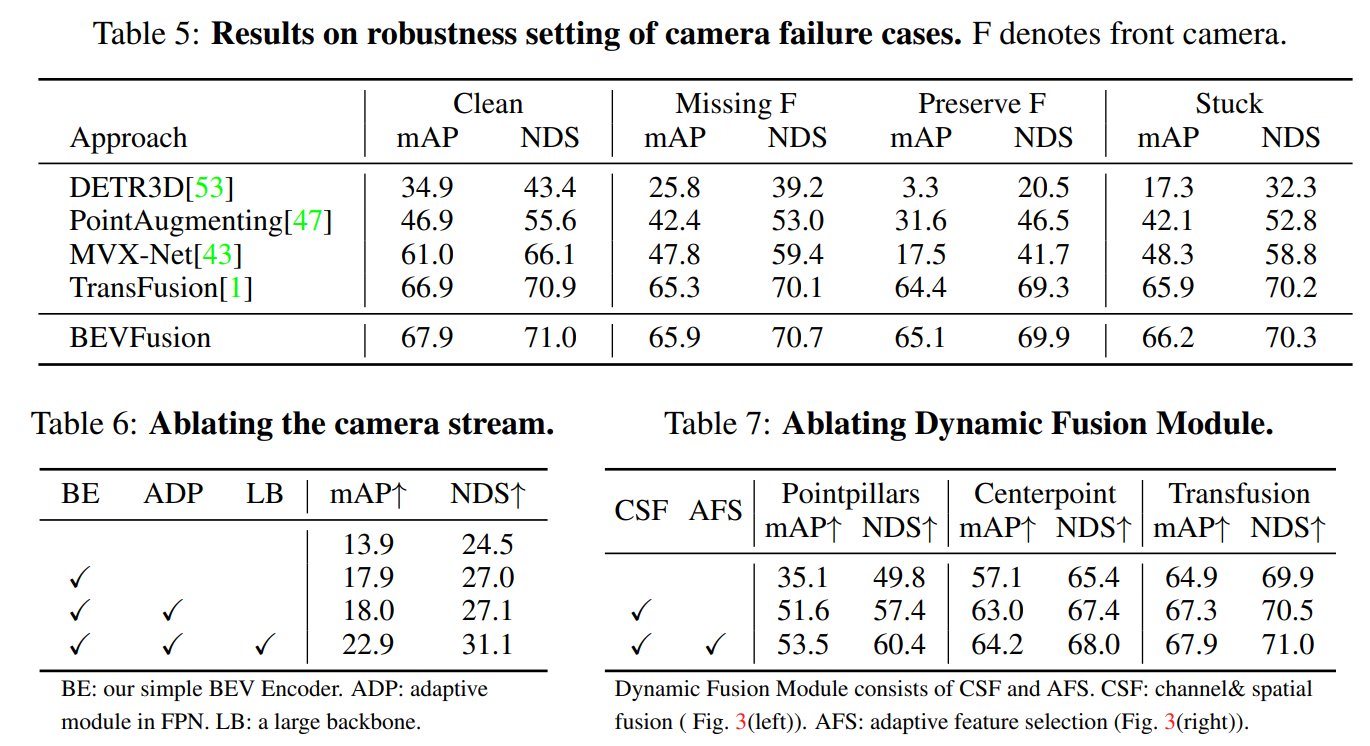
【多传感器融合】BEVFusion: 激光雷达和视觉融合框架 NeurIPS 2022
前言 BEVFusion其实有两篇, 【1】BEVFusion: A Simple and Robust LiDAR-Camera Fusion Framework. NeurIPS 2022 | 北大&阿里提出 【2】BEVFusion: Multi-Task Multi-Sensor Fusion with Unified Bird’s-Eye View Representation 2022 | MIT提出 本文先分…...
kafka中的常见问题处理
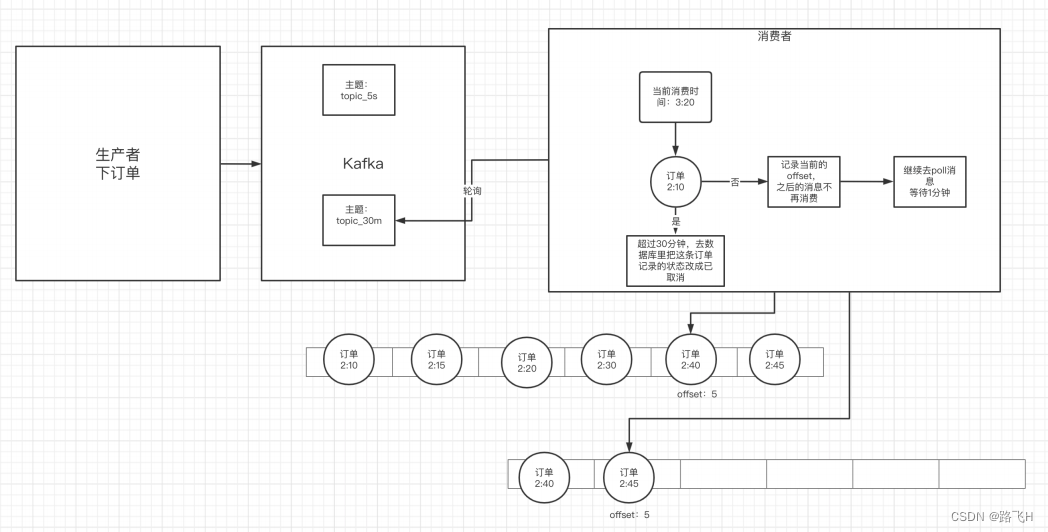
文章目录 1. 如何防⽌消息丢失2. 如何防⽌重复消费3. 如何做到消息的顺序消费4. 如何解决消息积压问题4.1 消息积压问题的出现4.2 消息积压的解决⽅案 5. 实现延时队列的效果5.1 应用场景5.2 具体方案 1. 如何防⽌消息丢失 ⽣产者:1)使⽤同步发送 2&…...
——@Styles装饰器:定义组件重用样式)
HarmonyOS(八)——@Styles装饰器:定义组件重用样式
前言 在前面我们介绍过Builder装饰器和BuilderParam装饰器。今天我们继续介绍另外一个装饰器——Styles装饰器:定义组件重用样式。 如果每个组件的样式都需要单独设置,在开发过程中会出现大量代码在进行重复样式设置,虽然可以复制粘贴&…...

手写VUE后台管理系统5 - 整合状态管理组件pinia
整合状态管理组件 安装整合创建实例挂载使用 pinia 是一个拥有组合式 API 的 Vue 状态管理库。 pinia 官方文档:https://pinia.vuejs.org/zh/introduction.html 安装 yarn add pinia整合 所有与状态相关的文件都放置于项目 src/store 目录下,方便管理 在…...
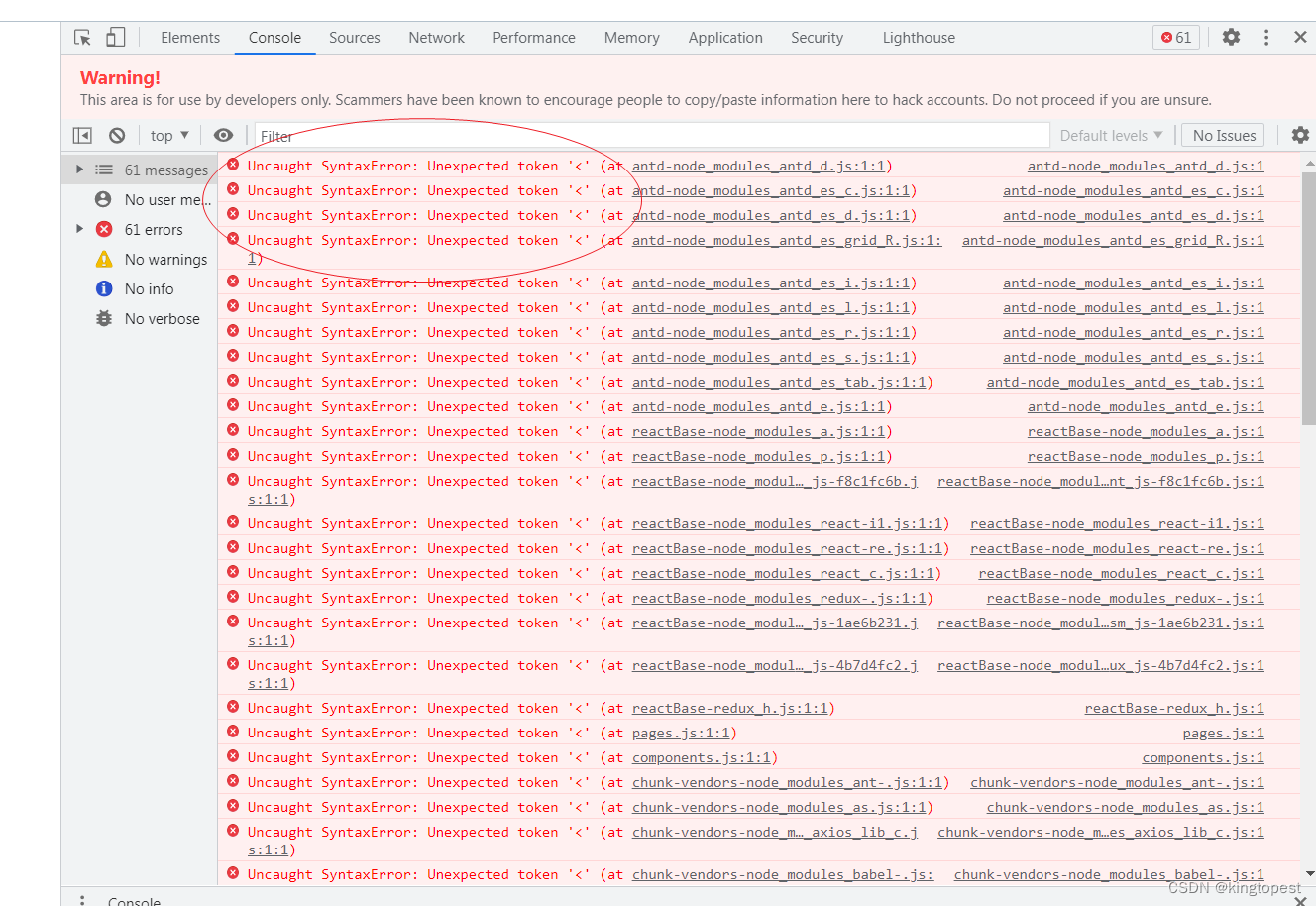
解决webpack打包生成gz格式css/js文件没法在nginx使用的问题--全网唯一正确
本文绝对是全网解决这个问题唯一正确的文章,没有之一! 很多人都说开启nginx gzip压缩,这些人完全是胡说八道!你们到底懂不懂叫gzip压缩啊?! 不信你就试试,如果css/js只有gz文件,ng…...
传统算法: Pygame 实现快速排序
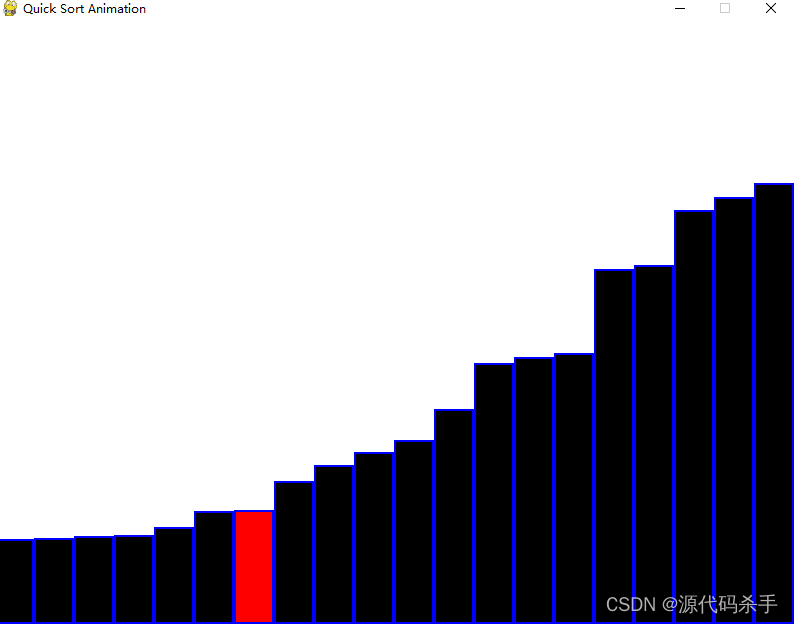
使用 Pygame 模块实现了快速排序的动画演示。首先,它生成一个包含随机整数的数组,并通过 Pygame 在屏幕上绘制这个数组的条形图。接着,通过快速排序算法对数组进行排序,动画效果可视化每一步的排序过程。在排序的过程中,程序选择一个基准元素(pivot),将数组分成两部分,…...

HarmonyOS入门开发(三) 持久化存储Preferences
接入鸿蒙几天以来,发现各种和Android不一样的地方,今天来看一下Preferences存储 在Android中比如有ShardPreferences、Mmkv这些持久化存储方式,开发起来很方便,读取速度也很快,在鸿蒙里面也提供了对应的持久化存储方案…...
类和对象——(3)再识对象
归纳编程学习的感悟, 记录奋斗路上的点滴, 希望能帮到一样刻苦的你! 如有不足欢迎指正! 共同学习交流! 🌎欢迎各位→点赞 👍 收藏⭐ 留言📝 你说那里有你的梦想,…...
【UGUI】实现背包的常用操作
1. 添加物品 首先,你需要一个包含物品信息的类,比如 InventoryItem: using UnityEngine;[CreateAssetMenu(fileName "NewInventoryItem", menuName "Inventory/Item")] public class InventoryItem : ScriptableObje…...
单机zk安装与zk四字命令
一、下载 Apache ZooKeeper可以在 Linux 系统中使用 wget 命令直接下载,官网地址 Apache ZooKeeper 二、解压 tar -zxvf apache-zookeeper-3.8.3-bin.tar.gz 进去解压的目录中, 进入到 zk 解压目录的 conf 目录,复制 zoo_sample.cfg 文件&a…...

matlab导入excel数据两种常见的方法
在MATLAB中导入Excel数据,你可以使用几种不同的方法。下面是两种常见的方法: 方法一:使用readtable函数 readtable函数允许你导入Excel文件中的数据,并将其存储为表格。 % 指定文件路径 filename C:\your\path\to\file.xlsx;%…...
华为全屋智能5.0,无为而“智”
在赖特西塔里埃森混凝土墙的中心壁龛里,一块铜牌上刻着一些英文,意思是“建筑的意义不是屋顶和墙,而是人们生活于其中的空间”。 这句话,取自老子《道德经》中的“凿户牖以为室,当其无,有室之用”。 《理想…...
Flask 实现Token认证机制
在Flask框架中,实现Token认证机制并不是一件复杂的事情。除了使用官方提供的flask_httpauth模块或者第三方模块flask-jwt,我们还可以考虑自己实现一个简易版的Token认证工具。自定义Token认证机制的本质是生成一个令牌(Token)&…...
MATLAB 和 Simulink 官方文档下载地址
MATLAB 官方文档中文版下载网址: https://ww2.mathworks.cn/help/pdf_doc/matlab/index.html 如图: MATLAB 官方文档英文版下载网址: https://ww2.mathworks.cn/help/pdf_doc/matlab/index.html?langen 如图: Simulink 官…...

【Element】el-switch开关 点击弹窗确认框时状态先改变----点击弹窗取消框失效
一、背景 需求:在列表中添加定期出账的开关按钮,点击开关时,原来的状态不改变,弹出弹窗;点击弹窗取消按钮:状态不改变,点击弹窗确定按钮:状态改变,并调取列表数据刷新页…...

Java 中最常用的设计模式之一,工厂模式模式的写法,
文章目录 工厂模式1、简单工厂模式2、工厂模式3、抽象工厂4、总结 工厂模式 工厂模式是 Java 中最常用的设计模式之一,工厂模式模式的写法有好几种,这里主要介绍三种:简单工厂模式、工厂模式、抽象工厂模式 1、简单工厂模式 这里以制造cof…...
HTML的学习
知己知彼百战不殆 打算学习一下javascript 所以先从基础的html语言开始 其实就是头部 和身体 头部控制整个 html的语言 title等 <html lang"en"> <head><meta charset"UTF-8"><meta name"viewport" content"width…...

JS设计模式 — 行为委托
回顾一下原型,发现[[Prototype]]机制就是指对象中的一个内部链接引用另一个对象,这个机制的本质就是对象之间的关联关系 1、面相委托的设计 Task {setID: function(ID) { this.id ID; },outputID: function() { console.log( this.id ); } }; // 让 …...

Microsoft Expression Web - 网页布局
在本章中,我们将介绍网页的基本布局。在创建我们的网页布局之前,我们需要考虑我们的内容,然后设计我们希望如何呈现该内容,因为它是在我们的网站上可见的内容。 由我们如何呈现我们的内容,以便我们的观众找到我们的网…...

AI Agent智能体技术:从问答到执行的范式革命
标签:AI Agent、大模型、智能体、LangChain、ReAct、Function Calling 📖 前言 2026年5月20日,谷歌I/O 2026大会在美国加州山景城开幕。谷歌CEO桑达尔皮查伊(Sundar Pichai)在大会上宣布:“我们已正式进入’智能体Gemini时代’。”就在同一天,百度Create 2026大会上,…...

效率优化:把网申填表交给塔塔网申的简历代投,省下时间刷题
招聘季一到,后台一堆私信。本以为大家会问算法题、系统设计,结果点开一看——全在骂网申填表。有个读者给我算了一笔账:投了30家公司,每家填20分钟,就是10个小时。10个小时能干嘛?刷好几套LeetCode…...
)
Gemini模型训练数据合规性审查清单(含原始数据来源验证、合法基础映射表、数据血缘图谱工具推荐)
更多请点击: https://intelliparadigm.com 第一章:Gemini模型训练数据合规性审查总览 Gemini系列大语言模型的训练数据来源广泛,涵盖公开网页、学术文献、代码仓库及多语种图书资源。为确保其符合全球主要司法辖区的数据治理要求(…...
)
避坑指南:在Quartus II里搞定矩阵键盘与数码管,这些细节决定成败(附代码)
Quartus II实战避坑:矩阵键盘与数码管调试的七个致命细节 第一次在FPGA上实现矩阵键盘控制数码管显示时,我遇到了所有初学者都会踩的坑——按下按键后数码管要么毫无反应,要么显示乱码。这不是代码逻辑问题,而是那些教程里从不提及…...

GPT-4万亿参数仅激活2%?揭秘MoE稀疏激活的工程真相
1. 项目概述:参数规模与稀疏激活的真相拆解“GPT-4 Has 1.8 Trillion Parameters. It Uses 2% of Them Per Token.”——这句话过去两年在技术社区反复刷屏,常被当作“大模型已突破算力瓶颈”的佐证,也常被误读为“GPT-4只用360亿参数&#x…...

Stata面板数据回归保姆级教程:从xtset到豪斯曼检验,手把手搞定实证分析
Stata面板数据回归实战指南:从数据准备到模型选择的完整解析 面板数据分析在经济学、管理学等社科领域占据着核心地位,但许多初学者在面对Stata操作时常常感到无从下手。本文将从一个完整的实证分析流程出发,不仅介绍基础命令,更着…...

从B73到5000个RILs:手把手拆解玉米NAM群体构建的完整流程与关键决策
玉米NAM群体构建全流程解析:从亲本筛选到RILs优化的科学决策 站在玉米遗传研究的十字路口,我们常常面临一个核心挑战:如何在有限资源下构建既能捕获广泛遗传多样性,又能实现精准定位的群体?2009年,Buckler团…...

用 n8n 搭建自己的自动化工作流平台
用 n8n 搭建自己的自动化工作流平台分类:开源项目部署n8n 适合Webhook、邮件通知、表单处理和 API 自动化。这类主题真正跑起来并不难,难的是上线后稳定、可备份、能排错。本文按实操方式整理一套可以直接落地的流程,默认你已经会登录 Linux …...

电动工具MCU选型与开发:从FOC算法到高集成度设计的工程实践
1. 项目概述:为什么电动工具需要一颗“聪明”的MCU?大家好,我是覃杰,在瑞萨电子上海分公司负责MCU相关的技术方案支持。今天我们不聊那些高大上的概念,就从一个工程师最熟悉的场景聊起:你手里那把正在“嗡嗡…...

Gemini3.1Pro构建神经符号系统实战
用 Gemini 3.1 Pro 构建神经符号系统的可行性探讨:从“会推理”到“能落地执行”在大模型时代,大家越来越关心的不只是“模型会不会回答”,而是能不能把推理可靠地用到复杂任务里:比如自动化规划、合规决策、工具调用、甚至半自动…...