成都工业学院2021级操作系统专周课程设计FCFS,SSTF,SCAN,LOOK算法的实现
运行环境
操作系统:Windows 11 家庭版
运行软件:CLion 2023.2.2
源代码文件
#include <iostream>
#include <vector>
#include <algorithm>
#include <random>
using namespace std;// 生成随机数
int generateRandomNumber(int min, int max) {random_device rd;mt19937 gen(rd());uniform_int_distribution<> dis(min, max);return dis(gen);
}// 计算引臂移动量
int calculateArmMovement(const vector<int>& movementSequence) {int movement = 0;for (int i = 1; i < movementSequence.size(); ++i) {movement += abs(movementSequence[i] - movementSequence[i-1]);}return movement;
}// 计算寻道时间
int calculateSeekTime(int armMovement, int timePerTrack) {return armMovement * timePerTrack;
}// 计算平均旋转延迟时间
int calculateRotationDelay(int armMovement, int diskSpeed) {return (armMovement * 60000) / diskSpeed; // 因转速为转/分钟,转成毫秒需要乘以60000
}// 计算传输时间
int calculateTransferTime(int numRequests, int sectorsPerTrack, int sectorSize, int diskSpeed) {int transferTime = (numRequests * sectorsPerTrack * sectorSize * 1000) / diskSpeed; // 字节数除以转速得到毫秒数return transferTime;
}// 计算总处理时间
int calculateTotalProcessingTime(int seekTime, int rotationDelay, int transferTime) {return seekTime + rotationDelay + transferTime;
}// 显示引臂移动序列
void displayArmMovementSequence(const vector<int>& movementSequence) {for (int i = 0; i < movementSequence.size(); ++i) {cout << movementSequence[i] << " ";}cout << endl;
}// SSTF算法
void sstfAlgorithm(vector<int>& ioRequests, int currentTrack, int timePerTrack, int diskSpeed, int sectorsPerTrack, int sectorSize) {cout << "SSTF算法:" << endl;vector<int> armMovementSequence;armMovementSequence.push_back(currentTrack); // 先添加当前磁道到移动序列while (!ioRequests.empty()) {int minDistance = INT_MAX;int nextTrack = -1;for (int i = 0; i < ioRequests.size(); ++i) {int distance = abs(currentTrack - ioRequests[i]);if (distance < minDistance) {minDistance = distance;nextTrack = ioRequests[i];}}armMovementSequence.push_back(nextTrack);currentTrack = nextTrack;ioRequests.erase(find(ioRequests.begin(), ioRequests.end(), nextTrack));}displayArmMovementSequence(armMovementSequence);int armMovement = calculateArmMovement(armMovementSequence);int seekTime = calculateSeekTime(armMovement, timePerTrack);int rotationDelay = calculateRotationDelay(armMovement, diskSpeed);int numRequests = ioRequests.size();int transferTime = calculateTransferTime(numRequests, sectorsPerTrack, sectorSize, diskSpeed);int totalProcessingTime = calculateTotalProcessingTime(seekTime, rotationDelay, transferTime);cout << "引臂移动量: " << armMovement << endl;cout << "寻道时间: " << seekTime << " 毫秒" << endl;cout << "平均旋转延迟时间: " << rotationDelay << " 毫秒" << endl;cout << "传输时间: " << transferTime << " 毫秒" << endl;cout << "所有访问处理时间: " << totalProcessingTime << " 毫秒" << endl;
}//SCAN算法
void scanAlgorithm(vector<int>& ioRequests, int currentTrack, int timePerTrack, int diskSpeed, int sectorsPerTrack, int sectorSize) {cout << "SCAN算法:" << endl;vector<int> scanArmMovementSequence;int maxTrack = *max_element(ioRequests.begin(), ioRequests.end());int minTrack = *min_element(ioRequests.begin(), ioRequests.end());scanArmMovementSequence.push_back(currentTrack);vector<int> tempStack;vector<bool> visitedTracks(200, false); // 初始化标记数组,200是磁道的数量if (currentTrack >= maxTrack) {// 先向内扫描tempStack.push_back(0); // 添加0进入栈visitedTracks[0] = true;for (int track = currentTrack - 1; track >= minTrack; --track) {if (find(ioRequests.begin(), ioRequests.end(), track) != ioRequests.end() && !visitedTracks[track]) {tempStack.push_back(track);visitedTracks[track] = true;}}sort(tempStack.begin(), tempStack.end()); // 对栈进行排序// 将栈中的磁道添加到移动序列for (int track : tempStack) {scanArmMovementSequence.push_back(track);}// 到达最小磁道号后折返,向外扫描for (int track = minTrack + 1; track <= maxTrack; ++track) {if (find(ioRequests.begin(), ioRequests.end(), track) != ioRequests.end() && !visitedTracks[track]) {scanArmMovementSequence.push_back(track);visitedTracks[track] = true;}}} else {// 先向外扫描tempStack.push_back(199); // 添加199进入栈visitedTracks[199] = true;for (int track = currentTrack + 1; track <= maxTrack; ++track) {if (find(ioRequests.begin(), ioRequests.end(), track) != ioRequests.end() && !visitedTracks[track]) {tempStack.push_back(track);visitedTracks[track] = true;}}sort(tempStack.begin(), tempStack.end()); // 对栈进行排序// 将栈中的磁道添加到移动序列for (int track : tempStack) {scanArmMovementSequence.push_back(track);}// 到达最大磁道号后折返,向内扫描for (int track = maxTrack - 1; track >= minTrack; --track) {if (find(ioRequests.begin(), ioRequests.end(), track) != ioRequests.end() && !visitedTracks[track]) {scanArmMovementSequence.push_back(track);visitedTracks[track] = true;}}}displayArmMovementSequence(scanArmMovementSequence);int scanArmMovement = calculateArmMovement(scanArmMovementSequence);int scanSeekTime = calculateSeekTime(scanArmMovement, timePerTrack);int scanRotationDelay = calculateRotationDelay(scanArmMovement, diskSpeed);int scanNumRequests = ioRequests.size();int scanTransferTime = calculateTransferTime(scanNumRequests, sectorsPerTrack, sectorSize, diskSpeed);int scanTotalProcessingTime = calculateTotalProcessingTime(scanSeekTime, scanRotationDelay, scanTransferTime);cout << "引臂移动量: " << scanArmMovement << endl;cout << "寻道时间: " << scanSeekTime << " 毫秒" << endl;cout << "平均旋转延迟时间: " << scanRotationDelay << " 毫秒" << endl;cout << "传输时间: " << scanTransferTime << " 毫秒" << endl;cout << "所有访问处理时间: " << scanTotalProcessingTime << " 毫秒" << endl;// 在最后释放visitedTracks的空间visitedTracks.clear();displayArmMovementSequence(scanArmMovementSequence);
}// LOOK算法
void lookAlgorithm(vector<int>& ioRequests, int currentTrack, string direction, int timePerTrack, int diskSpeed, int sectorsPerTrack, int sectorSize) {cout << "LOOK算法:" << endl;vector<int> armMovementSequence;int maxTrack = *max_element(ioRequests.begin(), ioRequests.end());int minTrack = *min_element(ioRequests.begin(), ioRequests.end());armMovementSequence.push_back(currentTrack); // 先添加当前磁道到移动序列if (direction == "outward") {// 向外扫描for (int track = currentTrack + 1; track <= maxTrack; ++track) {if (find(ioRequests.begin(), ioRequests.end(), track) != ioRequests.end()) {armMovementSequence.push_back(track);}}// 向内扫描for (int track = currentTrack - 1; track >= minTrack; --track) {if (find(ioRequests.begin(), ioRequests.end(), track) != ioRequests.end()) {armMovementSequence.push_back(track);}}} else {// 向内扫描for (int track = currentTrack - 1; track >= minTrack; --track) {if (find(ioRequests.begin(), ioRequests.end(), track) != ioRequests.end()) {armMovementSequence.push_back(track);}}// 向外扫描for (int track = currentTrack + 1; track <= maxTrack; ++track) {if (find(ioRequests.begin(), ioRequests.end(), track) != ioRequests.end()) {armMovementSequence.push_back(track);}}}displayArmMovementSequence(armMovementSequence);int armMovement = calculateArmMovement(armMovementSequence);int seekTime = calculateSeekTime(armMovement, timePerTrack);int rotationDelay = calculateRotationDelay(armMovement, diskSpeed);int numRequests = ioRequests.size();int transferTime = calculateTransferTime(numRequests, sectorsPerTrack, sectorSize, diskSpeed);int totalProcessingTime = calculateTotalProcessingTime(seekTime, rotationDelay, transferTime);cout << "引臂移动量: " << armMovement << endl;cout << "寻道时间: " << seekTime << " 毫秒" << endl;cout << "平均旋转延迟时间: " << rotationDelay << " 毫秒" << endl;cout << "传输时间: " << transferTime << " 毫秒" << endl;cout << "所有访问处理时间: " << totalProcessingTime << " 毫秒" << endl;
}// 根据选择的调度算法进行处理
void processAlgorithm(vector<int>& ioRequests, int currentTrack, int timePerTrack, int startupTime, int diskSpeed, int sectorsPerTrack, int sectorSize, const string& algorithmName) {vector<int> armMovementSequence;if (algorithmName == "FCFS") {armMovementSequence = ioRequests; // 直接按照顺序处理请求} else if (algorithmName == "SSTF") {sstfAlgorithm(ioRequests, currentTrack, timePerTrack, diskSpeed, sectorsPerTrack, sectorSize);return;} else if (algorithmName == "SCAN") {scanAlgorithm(ioRequests, currentTrack, timePerTrack, diskSpeed, sectorsPerTrack, sectorSize);return;} else if (algorithmName == "LOOK") {lookAlgorithm(ioRequests, currentTrack, "outward", timePerTrack, diskSpeed, sectorsPerTrack, sectorSize);return;} else {cout << "未知的调度算法:" << algorithmName << endl;return;}armMovementSequence.insert(armMovementSequence.begin(), currentTrack); // 加入初始位置displayArmMovementSequence(armMovementSequence);int armMovement = calculateArmMovement(armMovementSequence);int seekTime = calculateSeekTime(armMovement, timePerTrack);int rotationDelay = calculateRotationDelay(armMovement, diskSpeed);int numRequests = ioRequests.size();int transferTime = calculateTransferTime(numRequests, sectorsPerTrack, sectorSize, diskSpeed);int totalProcessingTime = calculateTotalProcessingTime(seekTime, rotationDelay, transferTime);cout << "引臂移动量: " << armMovement << endl;cout << "寻道时间: " << seekTime << " 毫秒" << endl;cout << "平均旋转延迟时间: " << rotationDelay << " 毫秒" << endl;cout << "传输时间: " << transferTime << " 毫秒" << endl;cout << "所有访问处理时间: " << totalProcessingTime << " 毫秒" << endl;
}int main() {int initialTrack; // 磁头初始位置cout << "请输入磁头初始位置:";cin >> initialTrack;int timePerTrack; // 跨越1个磁道所用时间(毫秒)int startupTime; // 启动时间(毫秒)int diskSpeed; // 磁盘转速(转/分钟)int sectorsPerTrack; // 每磁道扇区数int sectorSize; // 每扇区字节数cout << "请输入跨越1个磁道所用时间(毫秒):";cin >> timePerTrack;cout << "请输入启动时间(毫秒):";cin >> startupTime;cout << "请输入磁盘转速(转/分钟):";cin >> diskSpeed;cout << "请输入每磁道扇区数:";cin >> sectorsPerTrack;cout << "请输入每扇区字节数:";cin >> sectorSize;vector<int> ioRequests;vector<int> diskTrackNumbers;for(int i=1; i<201; i++){diskTrackNumbers.push_back(i);} // 磁道号固定为0到10int currentTrack = initialTrack; // 修改为用户输入的初始位置string direction = (generateRandomNumber(0, 1) == 0) ? "outward" : "inward"; // 添加这一行以初始化方向// 生成随机磁道I/O请求序列cout << "生成的随机磁道I/O请求序列:" << endl;for (int i = 0; i < 6; ++i) {int track = generateRandomNumber(0, diskTrackNumbers.size() - 1);ioRequests.push_back(diskTrackNumbers[track]);cout << ioRequests[i] << " ";}cout << endl;// 选择调度算法string algorithmName;cout << "请选择调度算法(FCFS、SSTF、SCAN、LOOK):";cin >> algorithmName;// 处理IO请求processAlgorithm(ioRequests, currentTrack, timePerTrack, startupTime, diskSpeed, sectorsPerTrack, sectorSize, algorithmName);return 0;
}
源代码示例
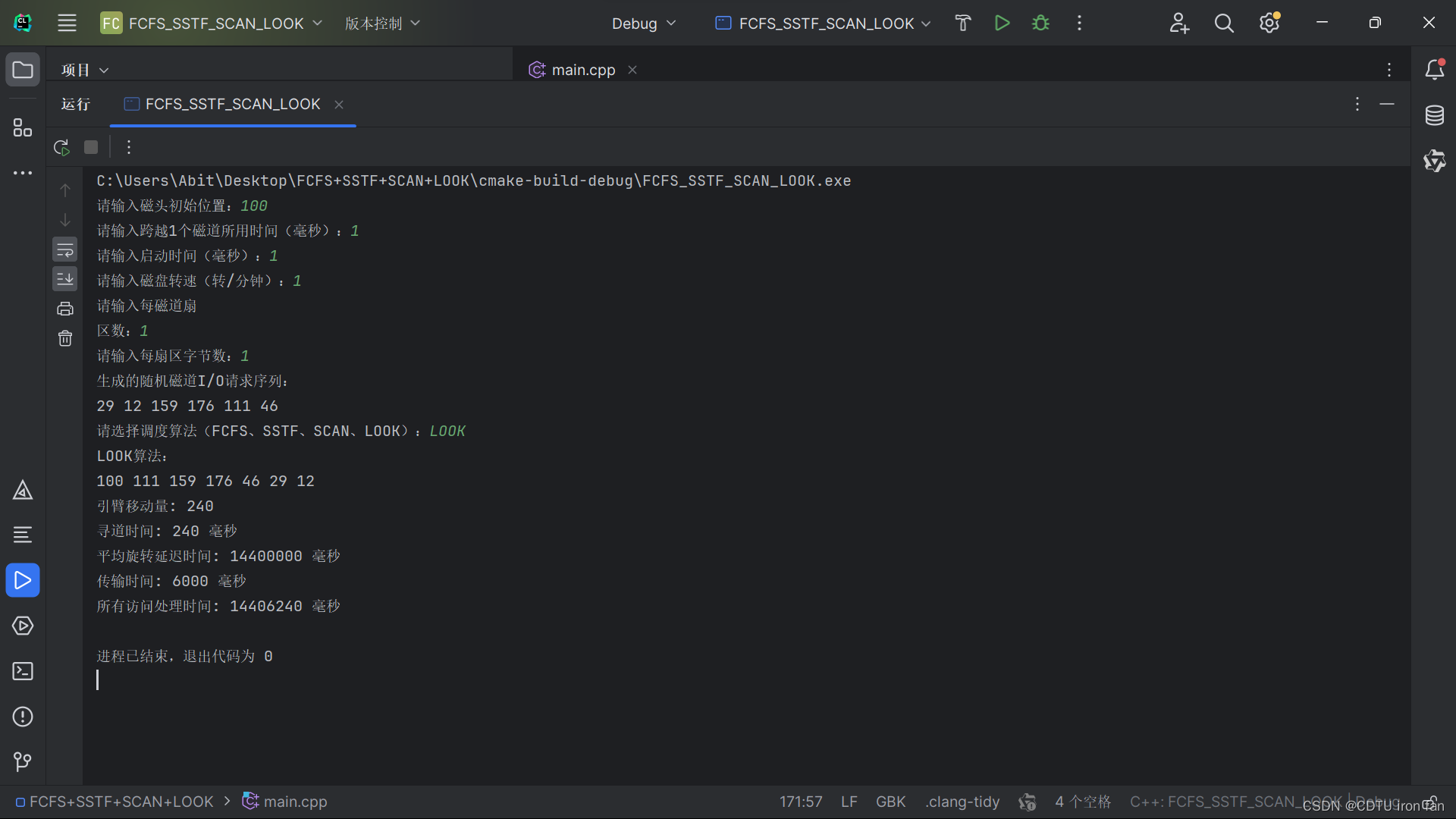
运行结果截图
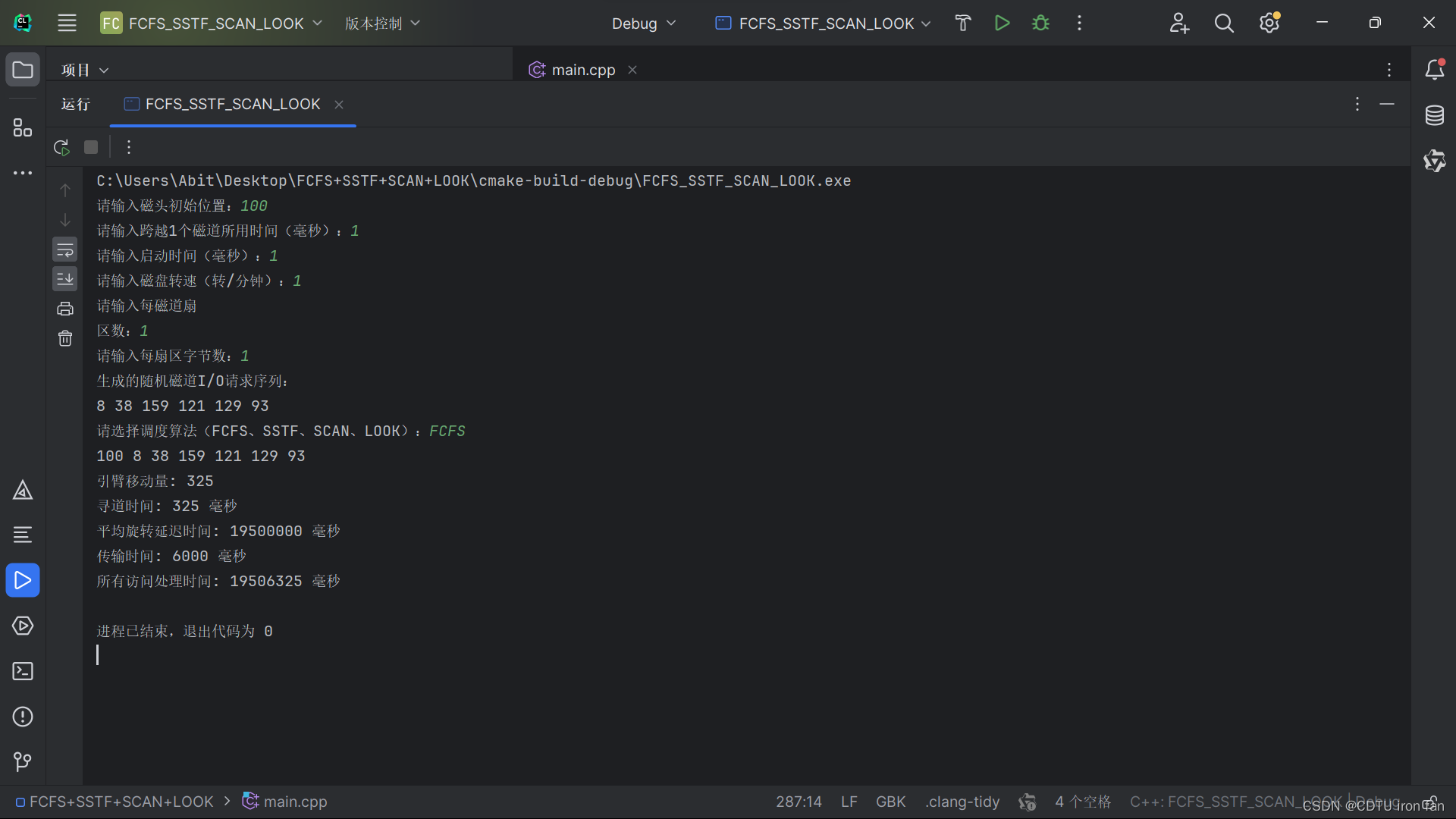
FCFS算法
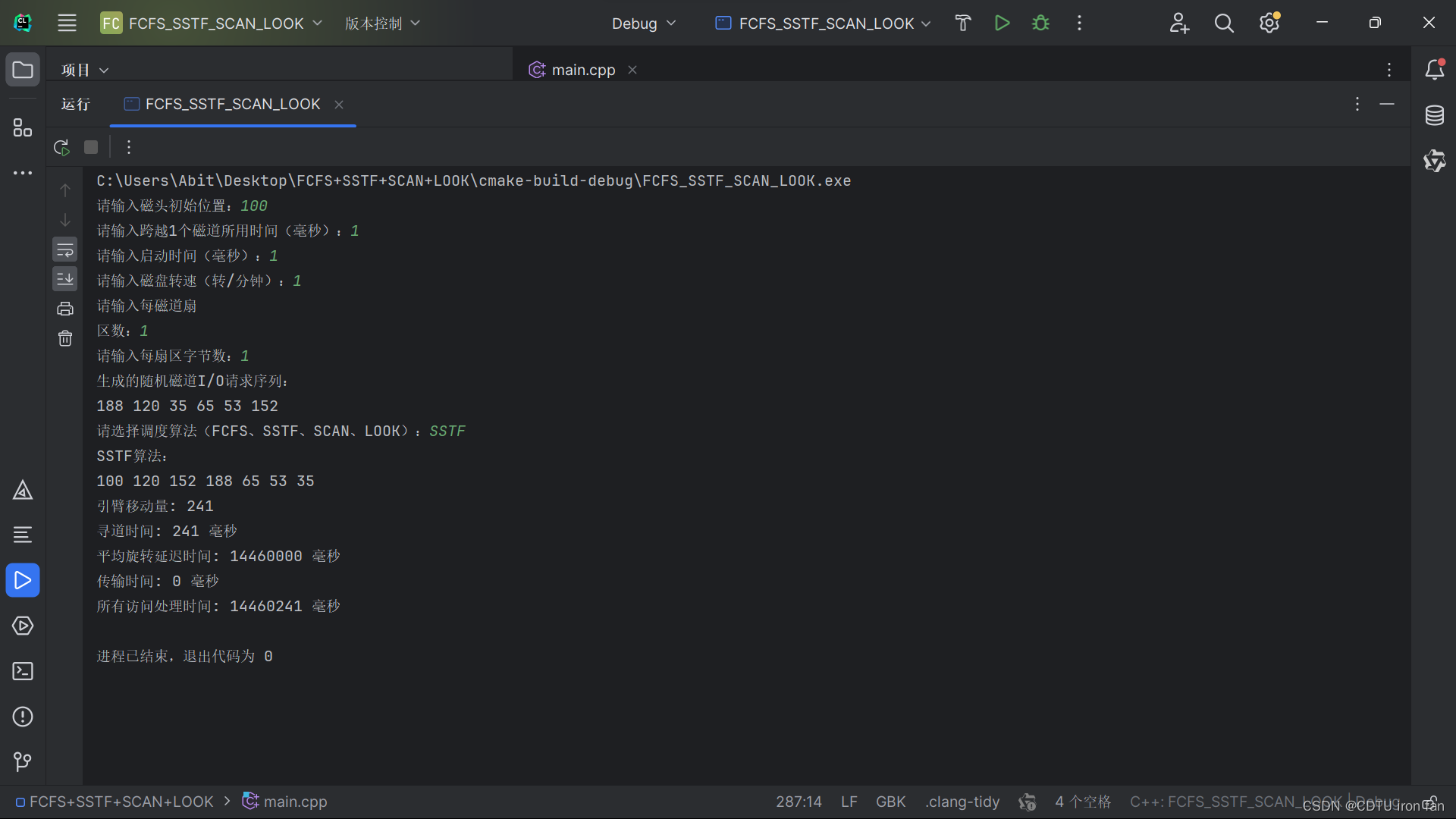
SSTF算法
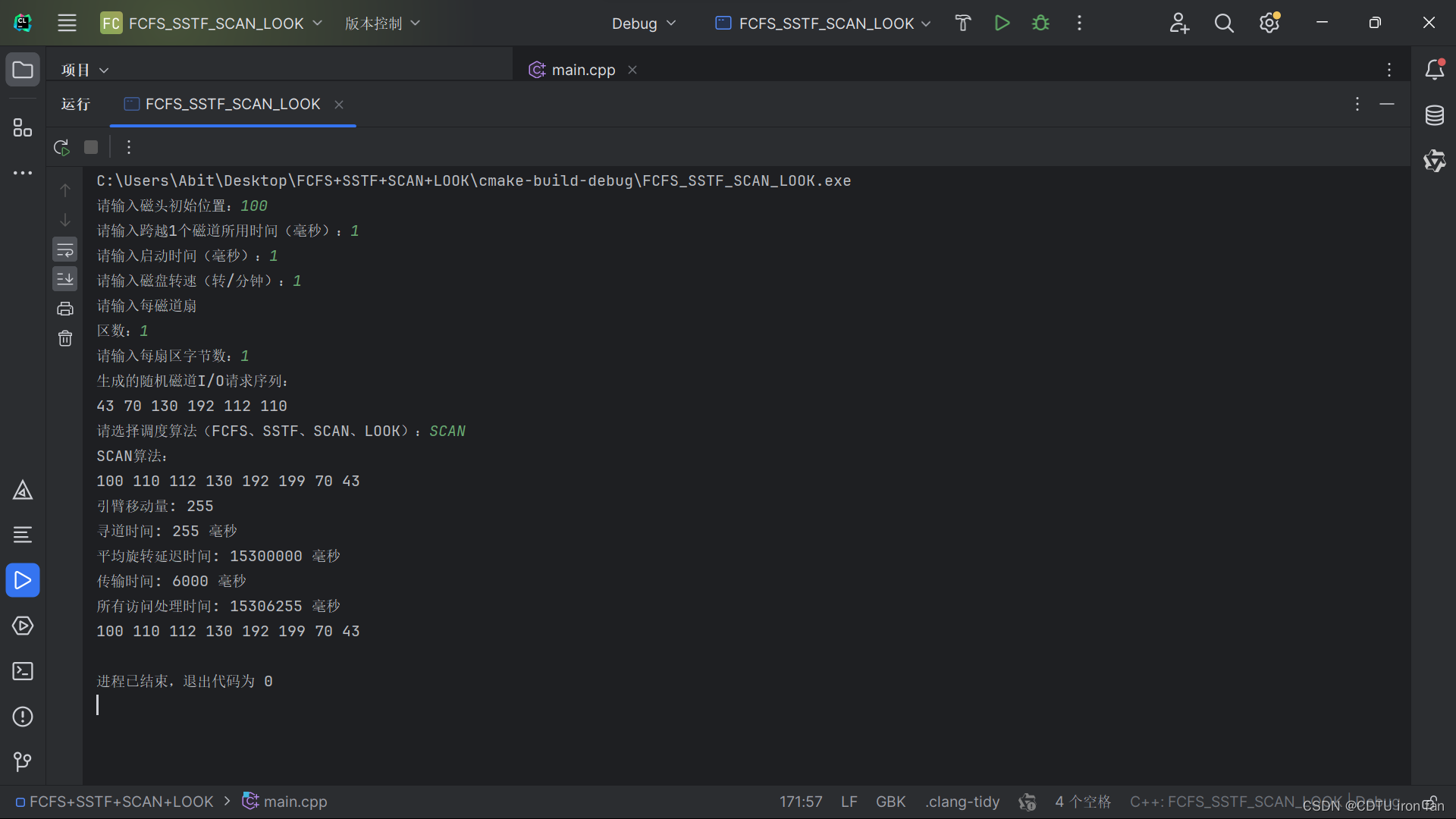
SCAN算法
LOOK算法
注意事项
1、算法可能有点问题,大多数情况下是没有问题的
2、由于不同编译器可能不兼容,所以本人把代码都写在一起,避免了分文件造成的错误
相关文章:
成都工业学院2021级操作系统专周课程设计FCFS,SSTF,SCAN,LOOK算法的实现
运行环境 操作系统:Windows 11 家庭版 运行软件:CLion 2023.2.2 源代码文件 #include <iostream> #include <vector> #include <algorithm> #include <random> using namespace std;// 生成随机数 int generateRandomNumber…...
【51单片机系列】矩阵按键扩展实验
本文对矩阵按键的一个扩展,利用矩阵按键和动态数码管设计一个简易计算器。代码参考:https://blog.csdn.net/weixin_47060099/article/details/106664393 实现功能:使用矩阵按键,实现一个简易计算器,将计算数据及计算结…...

大数据云计算——Docker环境下部署Hadoop集群及运行集群案列
大数据云计算——Docker环境下部署Hadoop集群及运行集群案列 本文着重介绍了在Docker环境下部署Hadoop集群以及实际案例中的集群运行。首先,文章详细解释了Hadoop的基本概念和其在大数据处理中的重要性,以及为何选择在Docker环境下部署Hadoop集群。接着&…...
)
计算机网络链路层(期末、考研)
计算机网络总复习链接🔗 目录 组帧差错控制检错编码纠错编码 流量控制与可靠传输机制流量控制、可靠传输与滑动窗口机制单帧窗口与停止-等待协议多帧滑动窗口与后退N帧协议(GBN)多帧滑动窗口与选择重传协议 介质访问控制信道划分介质访问控制…...

洛谷 P8794 [蓝桥杯 2022 国 A] 环境治理
文章目录 [蓝桥杯 2022 国 A] 环境治理题目链接题目描述输入格式输出格式样例 #1样例输入 #1样例输出 #1 提示 思路解析CODE给点思考 [蓝桥杯 2022 国 A] 环境治理 题目链接 https://www.luogu.com.cn/problem/P8794 题目描述 LQ 国拥有 n n n 个城市,从 0 0 …...

力扣面试150题 | 买卖股票的最佳时期
力扣面试150题 | 买卖股票的最佳时期 题目描述解题思路代码实现 题目描述 121.买卖股票的最佳时期 给定一个数组 prices ,它的第 i 个元素 prices[i] 表示一支给定股票第 i 天的价格。 你只能选择 某一天 买入这只股票,并选择在 未来的某一…...
uniapp 之 图片 视频 文件上传
<view class"" style"padding: 24rpx 0"><text>相关资料 <text class"fs-26 color-666">(图片、视频、文档不超过9个)</text> </text><view class"flex align-center" style&…...

MIT线性代数笔记-第28讲-正定矩阵,最小值
目录 28.正定矩阵,最小值打赏 28.正定矩阵,最小值 由第 26 26 26讲的末尾可知在矩阵为实对称矩阵时,正定矩阵有以下四种判定方法(都是充要条件): 所有特征值都为正左上角所有 k k k阶子矩阵行列式都为正&…...
Python:五种算法RFO、GWO、DBO、HHO、SSA求解23个测试函数
一、五种算法介绍 (1)红狐优化算法(Red fox optimization,RFO) (2)灰狼优化算法(Grey Wolf Optimizer,GWO) (3)蜣螂优化算法(Dung beetle opti…...

如何参与开源项目
大家好,受卡哥邀请,和大家分享一下开源活动的相关经验。首先简要自我介绍一下,我目前在一所985研二在读,主要学习大数据方向,从去年开始参与开源活动近一年时间,也对多个Apache框架有所贡献。 由于学校或专…...
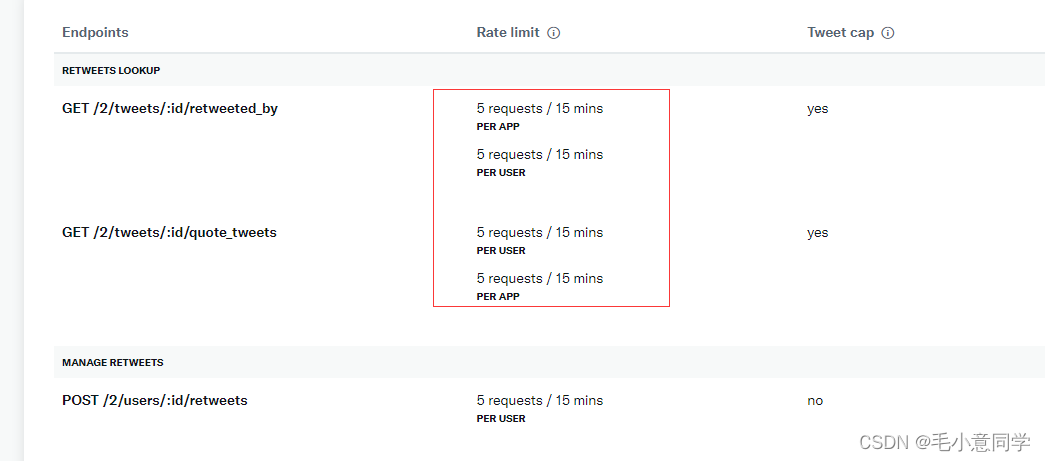
twitter开发如何避坑
此篇介绍在twitter开发过程中遇到的坑(尤其是费用的坑)。 一坑:免费接口少! 刚开始申请免费API使用的时候,twitter官方只会给你三个免费接口使用。 发twitter、删推文、查看用户信息。 这三个接口远远不够开发中使用…...
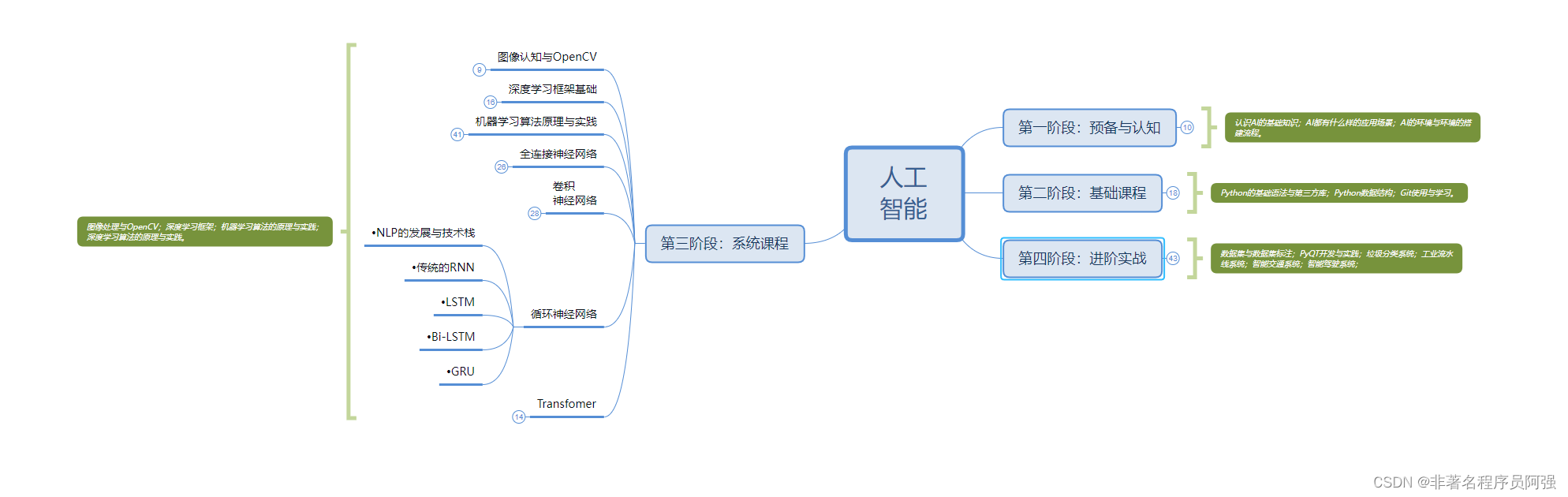
人工智能算法合集
人工智能(Artificial Intelligence,AI)作为当今世界最热门的技术领域之一,正日益改变着我们的生活方式、工作方式甚至整个社会结构。在人工智能领域中,算法是至关重要的一环,它们是实现人工智能技术应用的核…...
PythonStudio:一款国人写的python及窗口开发编辑IDE,可以替代pyqt designer等设计器了
本款软件只有十几兆,功能算是强大的,国人写的,很不错的python界面IDE.顶部有下载链接。下面有网盘下载链接,或者从官网直接下载。 目前产品免费,以后估计会有收费版本。主页链接:PythonStudio-硅量实验室 作…...

大模型应用_FastGPT
1 功能 整体功能,想解决什么问题 官方说明:FastGPT 是一个基于 LLM 大语言模型的知识库问答系统,提供开箱即用的数据处理、模型调用等能力。同时可以通过 Flow 可视化进行工作流编排,从而实现复杂的问答场景!个人体会…...

elasticsearch|大数据|elasticsearch的api部分实战操作以及用户和密码的管理
一, 前言 本文主要内容是通过elasticsearch的api来进行一些集群的管理和信息查询工作,以及elasticsearch用户的增删改查和密码的重设以及重置如何操作 接上文:elasticsearch|大数据|elasticsearch低版本集群的部署安装和安全增强---密码设…...

Android多进程和跨进程通讯方式
前言 我们经常开发过程中经常会听到线程和进程,在讲述Android进程多进程前我打算先简单梳理一下这俩者。 了解什么是进程与线程 进程: 系统中正在运行的一个应用程序,某个程序一旦运行就是一个进程,是资源分配的最小单位&#…...

通过Jenkins将应用发布到K8s1.24.3
一、准备基础环境 cat >> /etc/hosts <<EOF 192.168.180.210 k8s-master 192.168.180.200 k8s-node1 192.168.180.190 k8s-node2 192.168.180.180 gitlab 192.168.180.170 jenkins 192.168.180.160 harbor EOF 配置主机名 hostnamectl set-hostname k8s-master &am…...

正则表达式入门与实践
文章目录 一、为什么要有正则二、正则表达式基础概念三、Pattern与Matcher类的使用(一)Pattern类的常用方法(二)Matcher类的常用方法四、常用正则规则及其含义(一)规范表示(二)数量表示(三)逻辑运算符五、String对正则表达式的支持六、实践演练(一)匹配给定文本中的…...
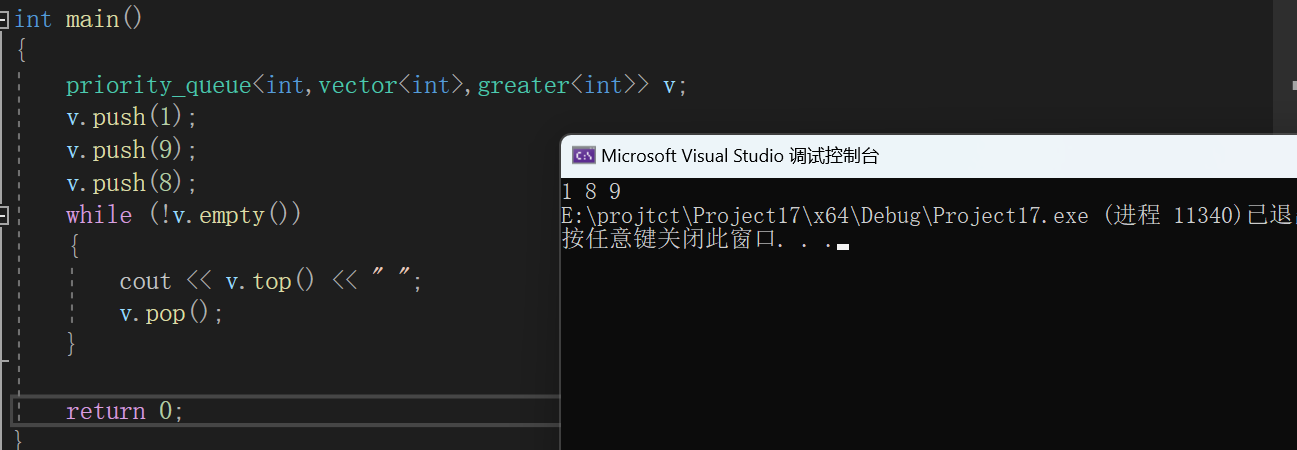
C++初阶(十六)优先级队列
📘北尘_:个人主页 🌎个人专栏:《Linux操作系统》《经典算法试题 》《C》 《数据结构与算法》 ☀️走在路上,不忘来时的初心 文章目录 一、priority_queue的介绍和使用1、priority_queue的介绍2、priority_queue的使用 二、priori…...
深入探索C语言中的二叉树:数据结构之旅
引言 在计算机科学领域,数据结构是基础中的基础。在众多数据结构中,二叉树因其在各种操作中的高效性而脱颖而出。二叉树是一种特殊的树形结构,每个节点最多有两个子节点:左子节点和右子节点。这种结构使得搜索、插入、删除等操作…...

第08章 FastAPI 与 SSE 流式 RAG 后端
第08章 FastAPI 与 SSE 流式 RAG 后端 到目前为止,知识库、检索工具、MCP 客户端都已经就绪,但仍缺少一个面向最终用户的入口。本章用 FastAPI 把整条 RAG 链路串起来:接收前端发来的自然语言问题,调用 MCP 工具检索相关工单&…...

用PCA给高维数据‘瘦身’:从鸢尾花数据集到人脸图像,实战对比降维效果与可视化技巧
用PCA给高维数据‘瘦身’:从鸢尾花数据集到人脸图像,实战对比降维效果与可视化技巧 当面对成百上千维的数据时,我们常会陷入"维度灾难"的困境——计算资源吃紧、模型训练缓慢,更糟的是噪声干扰导致分析结果失真。主成分…...

单元体幕墙计算方法研究
单元体幕墙计算方法研究 一、单元板块计算 选择隔离的单个单元进行计算,不需要考虑周边单元的影响。 单元之间的相互影响,来自于左右立柱的变形不一致,在截面选择上反应的就是左右立柱的截面参数的不同。 所以,单元间的相互影响,可以通过控制左右立柱截面参数的相近而进…...

OSINT自动化平台ClawShield:模块化架构与安全运营实战解析
1. 项目概述:一个面向安全运营的公开情报收集与分析平台最近在整理自己的开源项目收藏夹,发现一个挺有意思的仓库,叫SleuthCo/clawshield-public。乍一看这个名字,“ClawShield”,爪子与盾牌,就透着一股子攻…...

如何用PCL2启动器打造完美的Minecraft模组体验:从零到精通的完整指南
如何用PCL2启动器打造完美的Minecraft模组体验:从零到精通的完整指南 【免费下载链接】PCL Minecraft 启动器 Plain Craft Launcher(PCL)。 项目地址: https://gitcode.com/gh_mirrors/pc/PCL 你是否厌倦了每次启动Minecraft都要手动配…...

MTKClient终极指南:解锁联发科芯片调试的专业解决方案
MTKClient终极指南:解锁联发科芯片调试的专业解决方案 【免费下载链接】mtkclient MTK reverse engineering and flash tool 项目地址: https://gitcode.com/gh_mirrors/mt/mtkclient MTKClient作为一款专为联发科(MediaTek)芯片设计的…...

合宙Air153C看门狗芯片:嵌入式系统可靠性的硬件守护方案
1. 项目概述:一颗“小而美”的国产看门狗芯片最近在做一个低功耗的户外监测设备项目,主控用的就是合宙的Air系列MCU。在调试过程中,最让我头疼的就是系统偶尔的“死机”问题。设备部署在野外,不可能每次都跑过去手动重启。正当我琢…...

基于RAG的电影智能体构建:从向量检索到Agentic设计
1. 项目概述:一个能聊电影的智能体最近在GitHub上看到一个挺有意思的项目,叫tomasonjo/llm-movieagent。光看名字,你大概能猜到,这是一个和电影、和大型语言模型(LLM)相关的智能体。简单来说,它…...

从零构建现代化工作流引擎:架构、实战与生产级部署指南
1. 项目概述:一个为专业开发者打造的现代化工作流引擎最近在GitHub上看到一个挺有意思的项目,叫rohitg00/pro-workflow。光看名字,你可能觉得这又是一个“工作流”工具,市面上这类工具已经多如牛毛了。但当我深入去研究它的源码、…...

成本优化策略:降低云资源支出
成本优化策略:降低云资源支出 一、成本优化策略概述 1.1 成本优化策略的定义 成本优化策略是指通过各种技术和管理手段,降低云资源支出的策略和方法。它包括资源优化、成本监控、预算管理和采购策略等方面。 1.2 成本优化策略的价值 成本降低:…...