嵌入式-stm32-SR04超声波测距介绍及实战
一:超声波传感器介绍
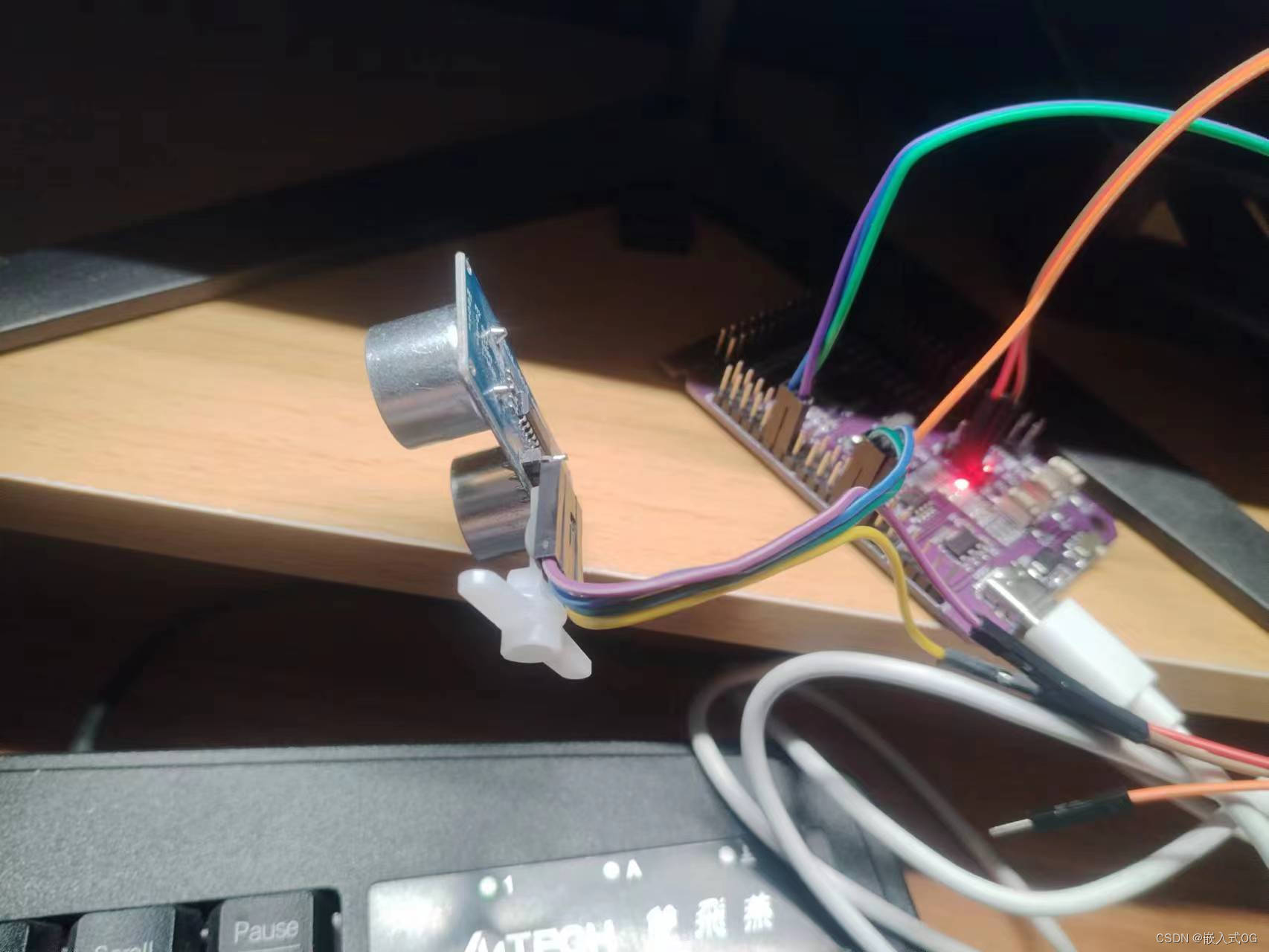
1.1、SR04超声波测距硬件模块
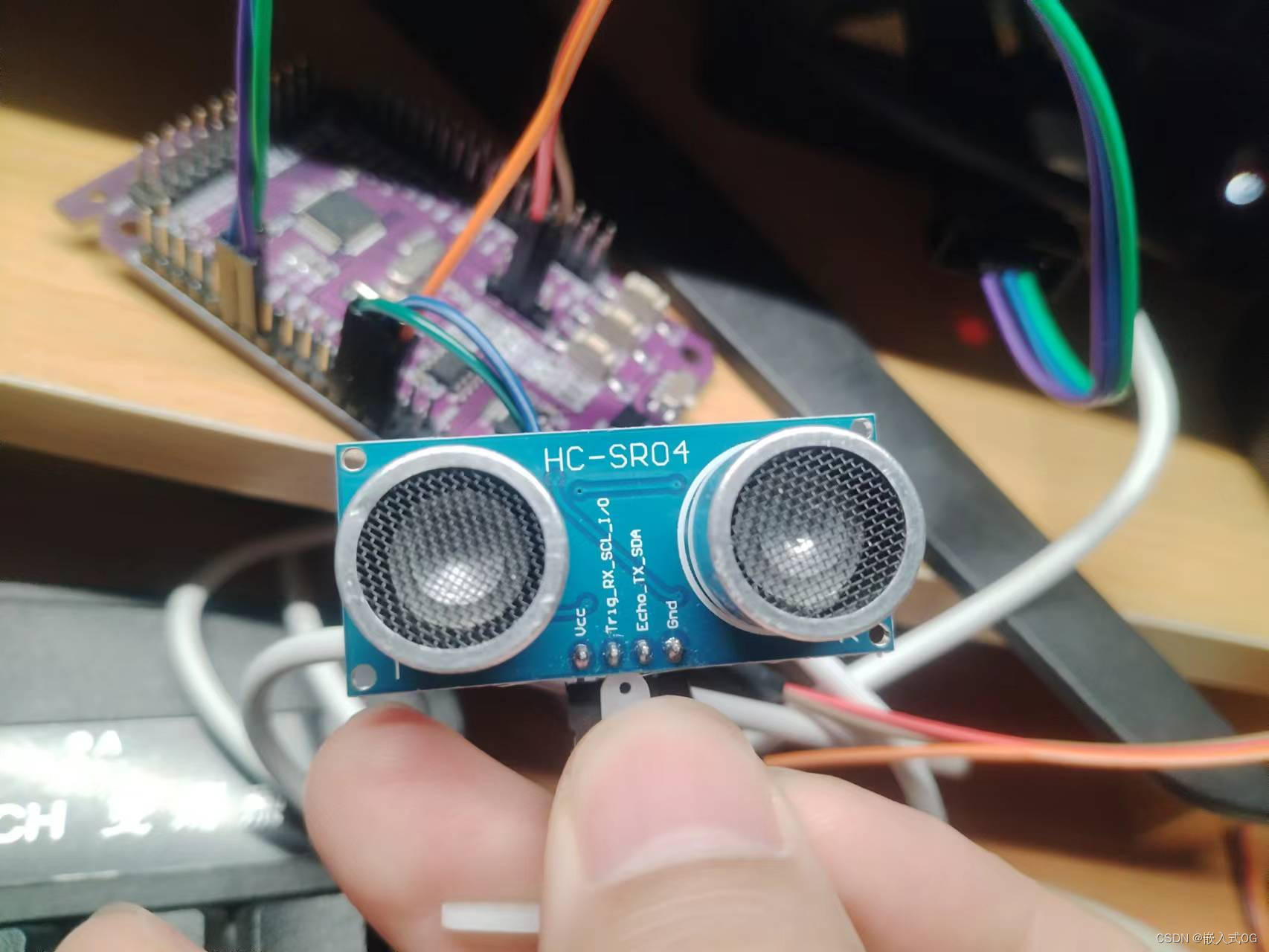
1.2、SR04的四个IO口
vcc:提供电源5V
gnd:接地
Trig:是**发送**声波信号的触发器
Echo:是**接收**回波信号的引脚
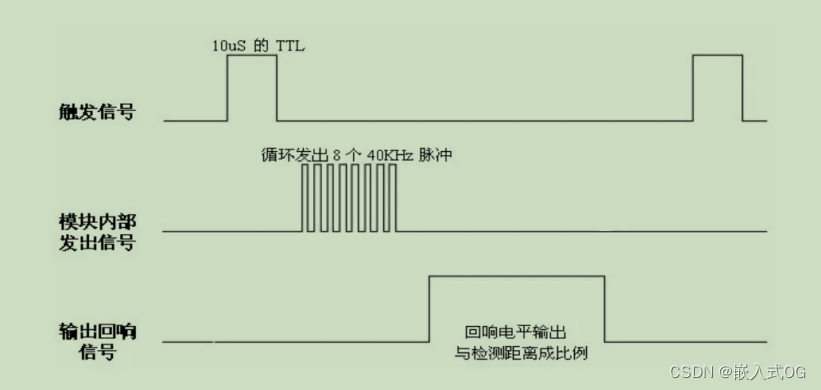
当TRIG信号被触发时,传感器会发送一定频率的声波信号,该信号被反射后,传感器会接收到回波信号,回波信号的时间差可以用来计算物体与传感器的距离。
1.3、SR04是高电平触发模块
所以默认是低电平
怎么让它发送波?
Trig ,给Trig端口至少10us的高电平
怎么知道它开始发了?
Echo信号,由低电平跳转到高电平,表示开始发送波
怎么知道接收了返回波?
Echo,由高电平跳转回低电平,表示波回来了
怎么算时间?
Echo引脚维持高电平的时间!
波发出去的那一下,开始启动定时器
波回来的拿一下,我们开始停止定时器,计算出中间经过多少时间
怎么算距离?
距离 = 速度 (340m/s)* 时间/2
二、需求介绍
2.1、SR04超声波测距需求介绍
需求:使用超声波测距,当手离传感器距离小于5cm时,LED1点亮,否则保持不亮状态。
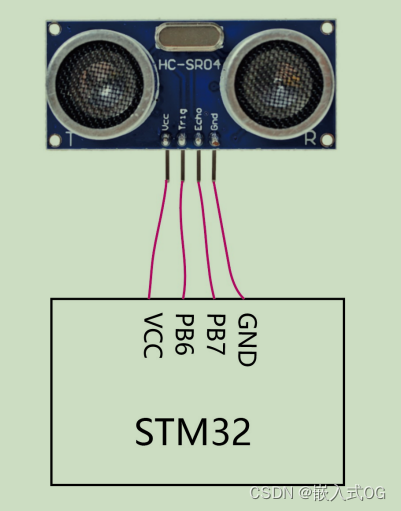
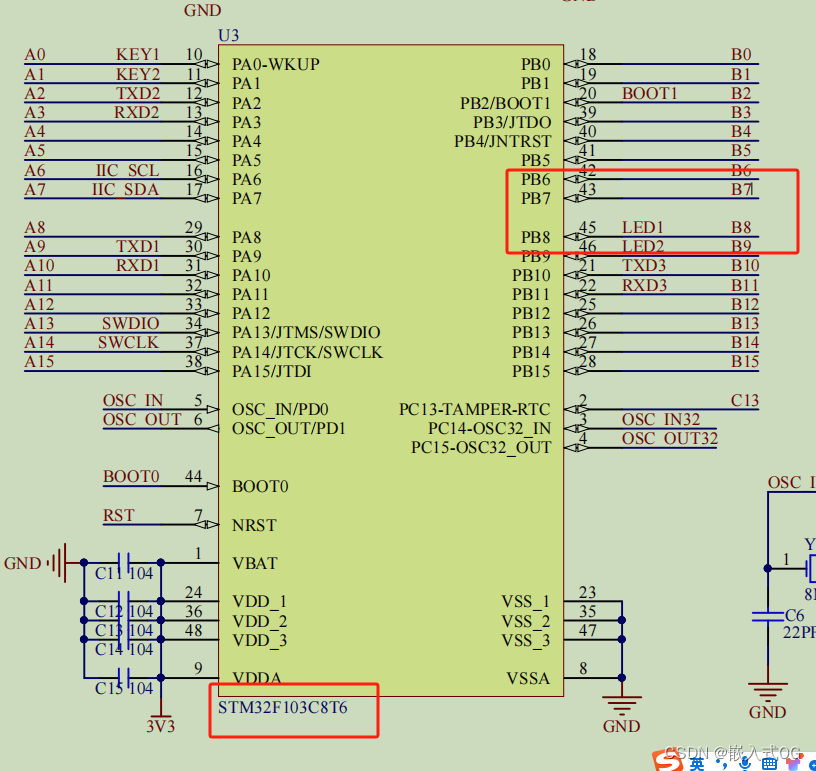
2.2、SR04超声波测距模块接线
Trig — PB6
Echo — PB7
LED1 — PB8
三:stm32CubeMX实现步骤以及细节
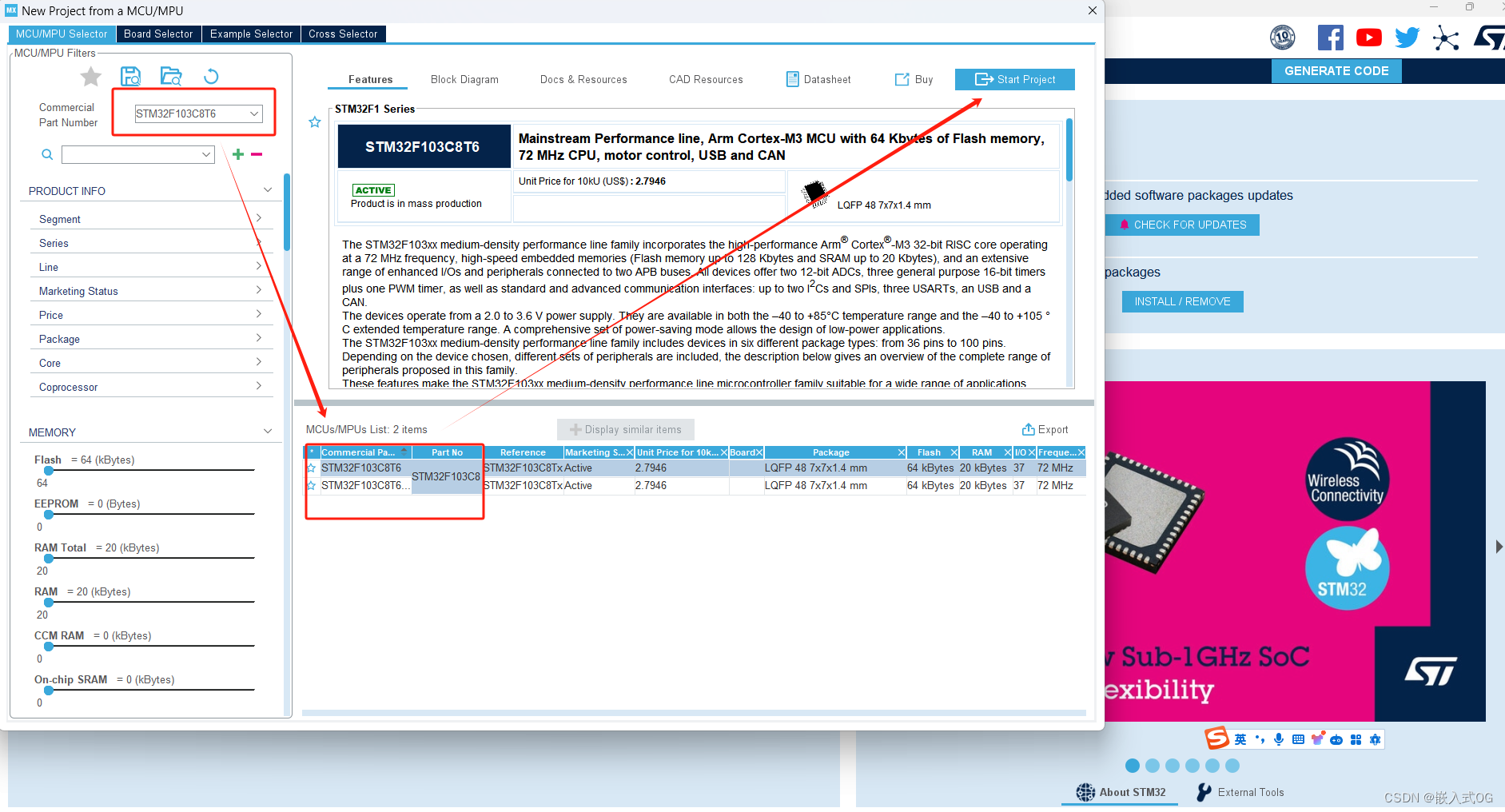
3.1、打开Stm32CubeMX,界面如图
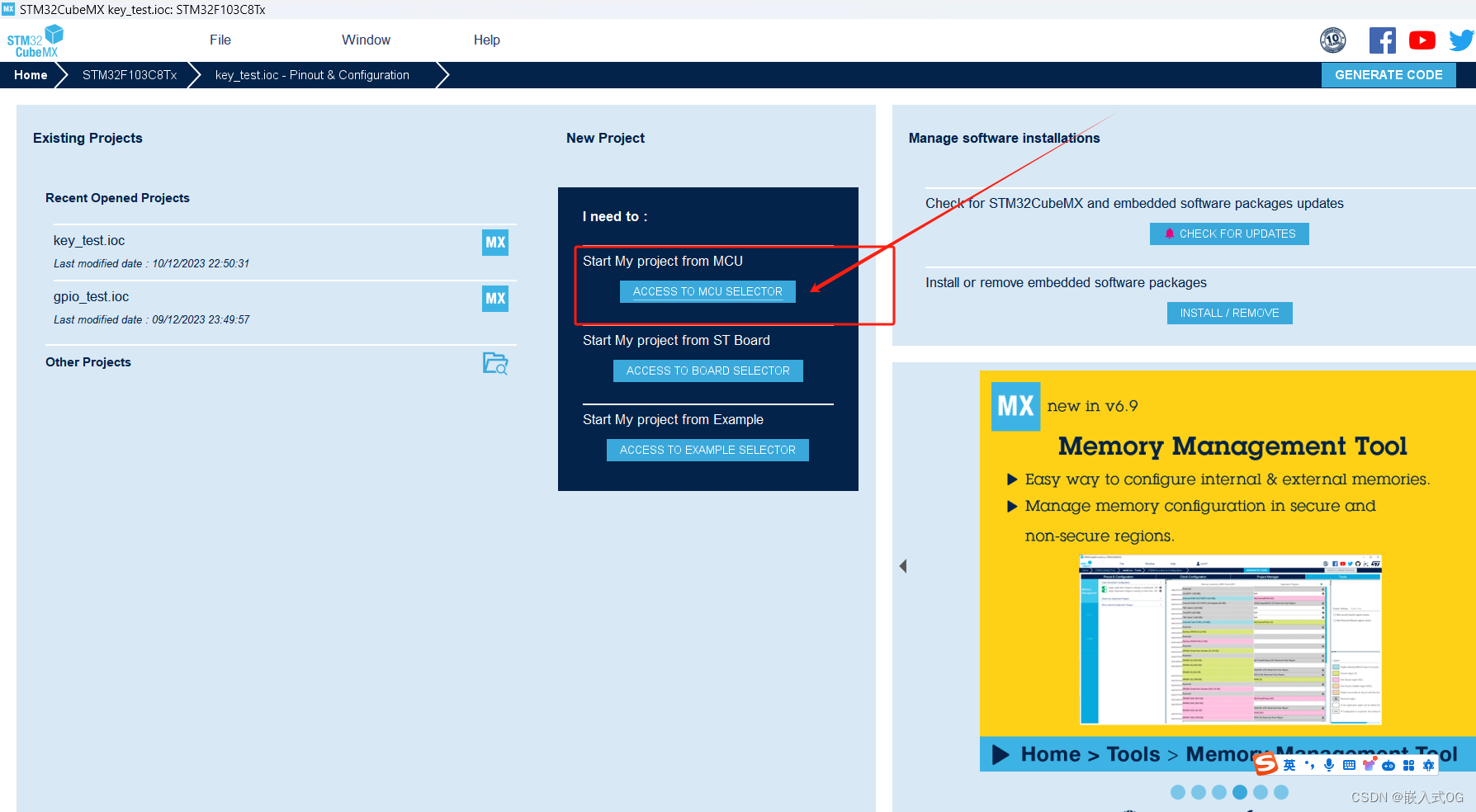
3.2、选芯片:stm32f103c8t6
3.3、读芯片引脚原理图
3.4、先把LED灯设置为高电平模式
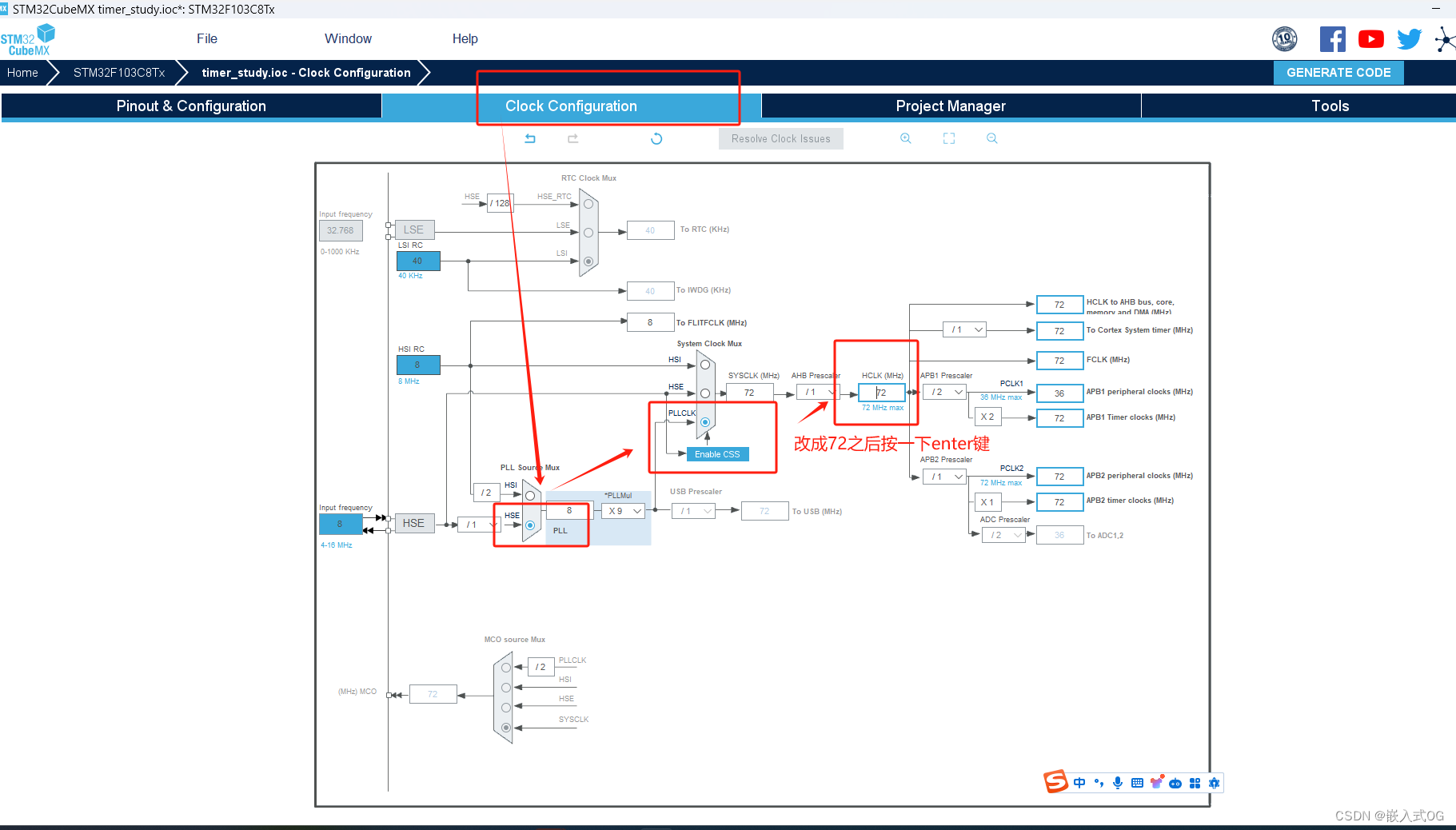
3.5、设置时钟
配置时钟频率
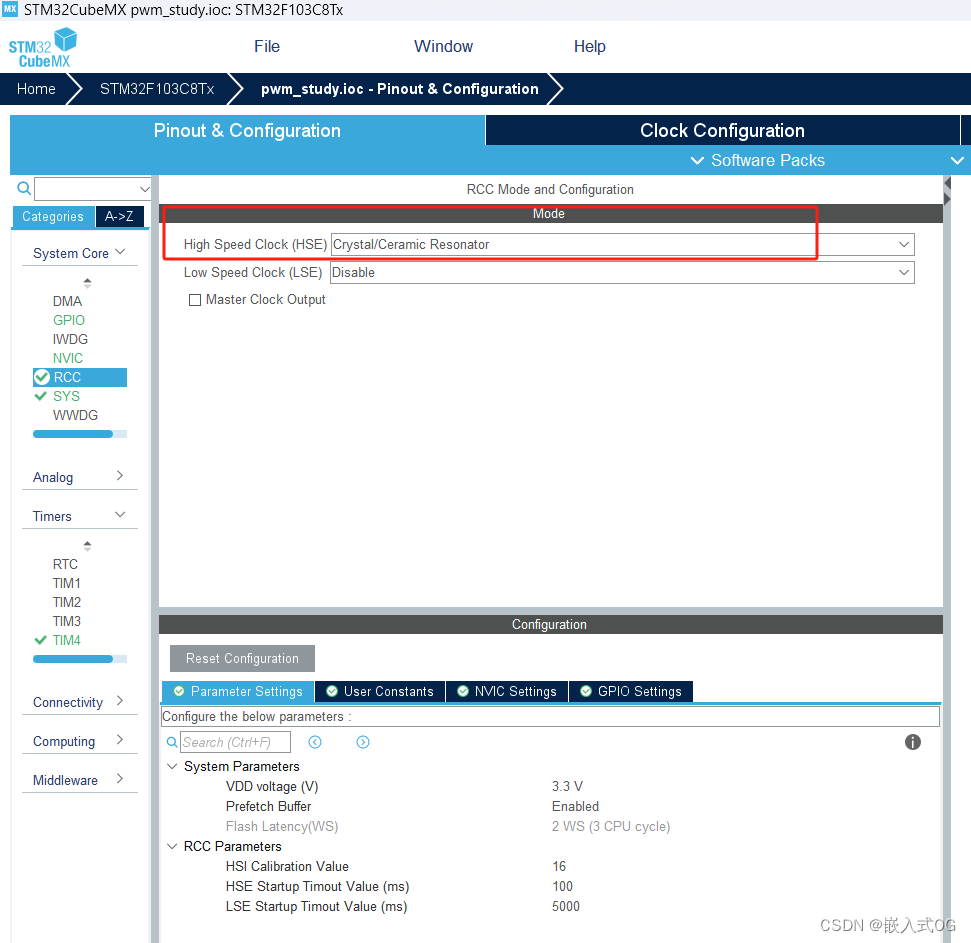
3.6、RCC配置
3.7、定时器
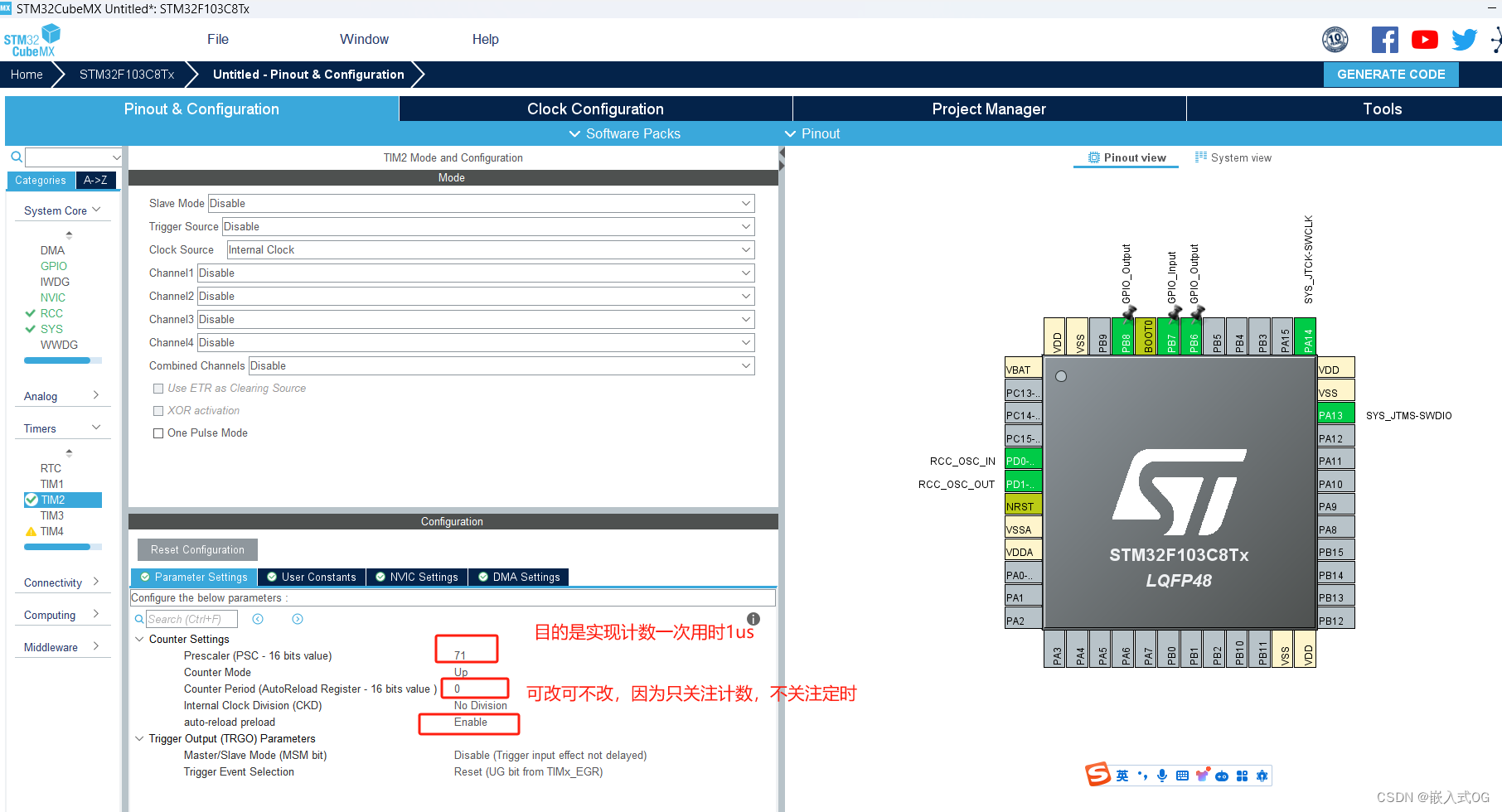 计数一次代表1us
计数一次代表1us

Tout就是一次的溢出时间,PSC=71,Tclk=72000 000hz(s),此处ARR=0
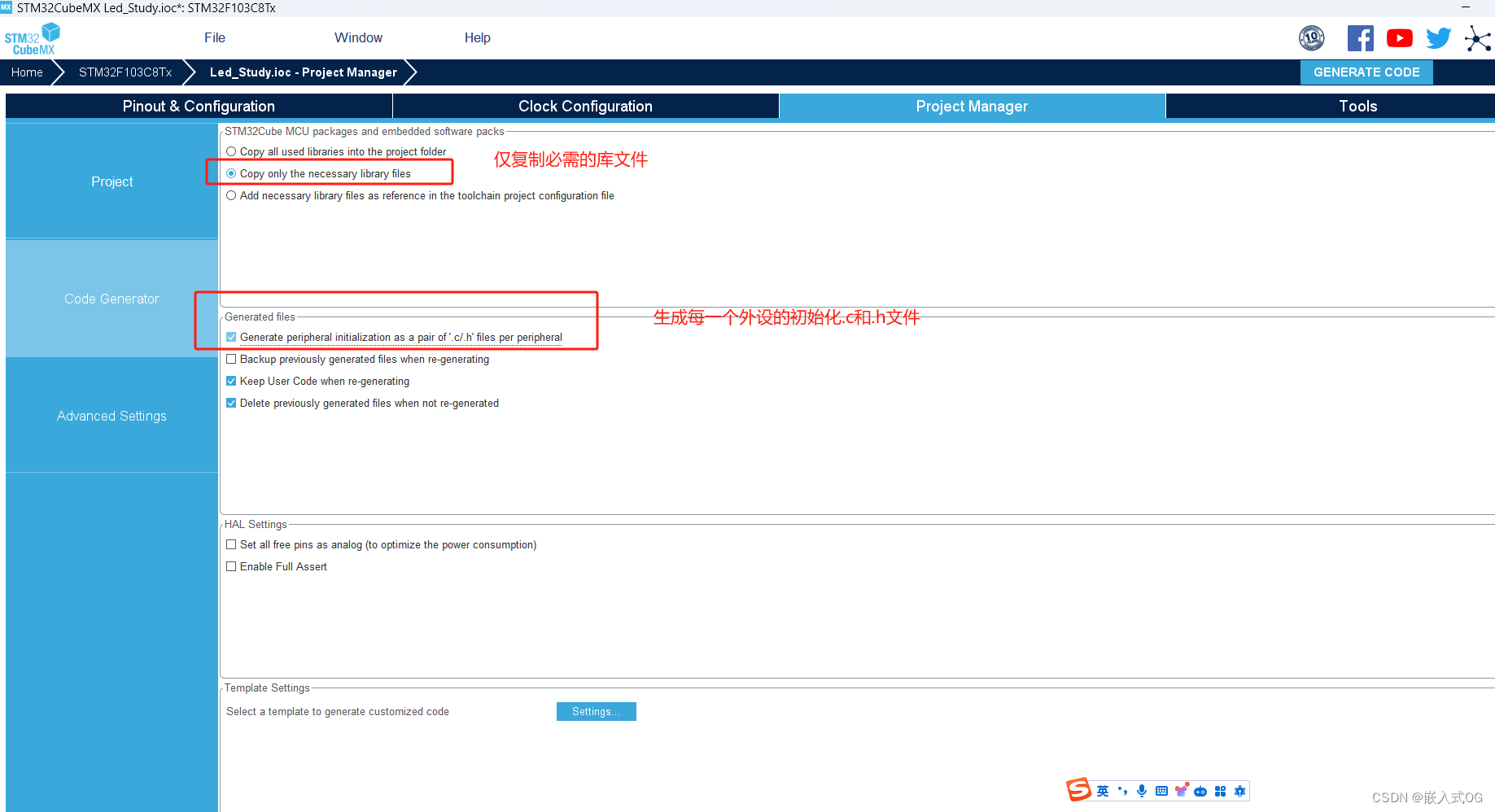
3.8、代码自动设置生成的文件
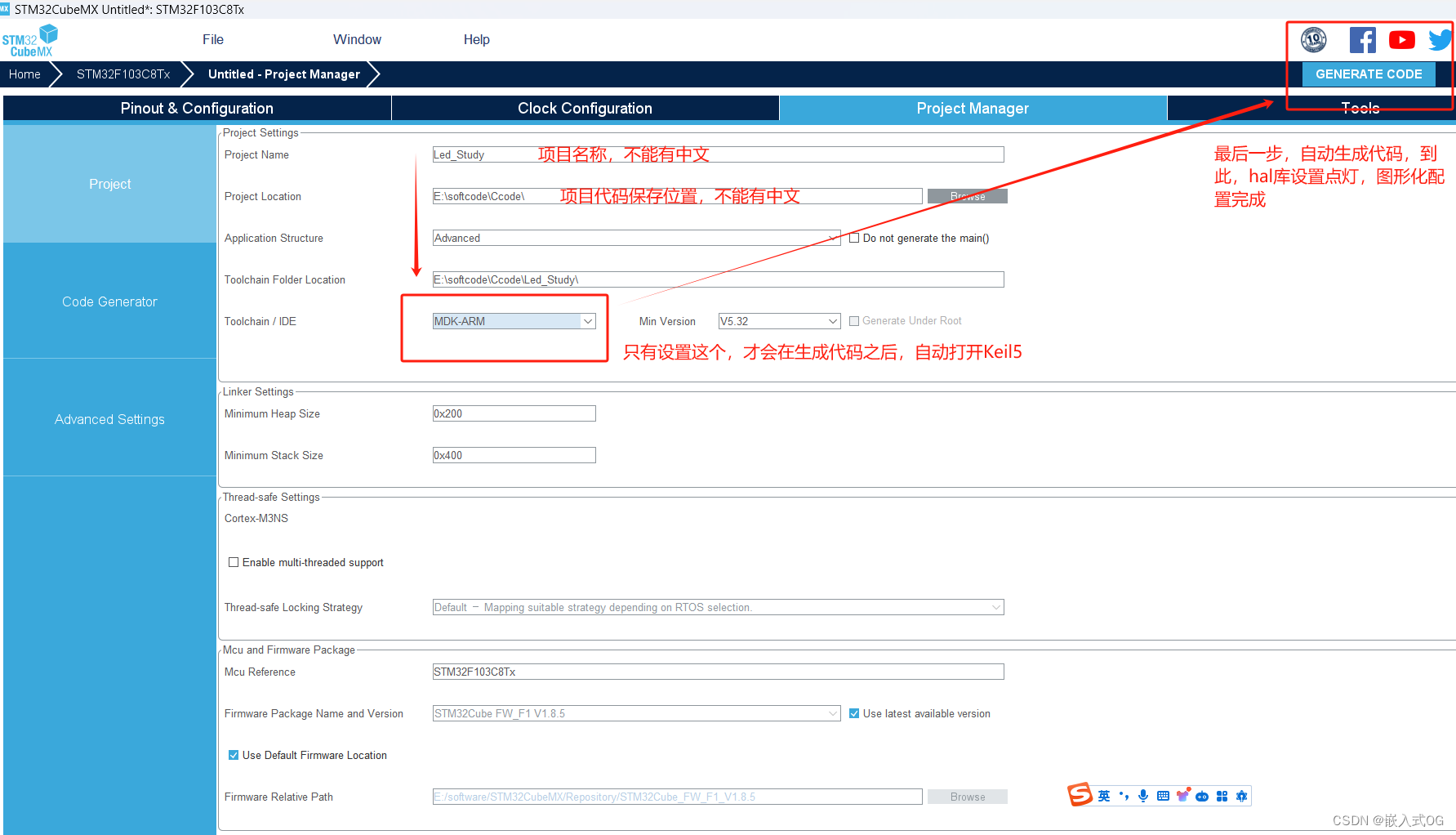
3.9、图形化最后一步
项目名称:sr04_study
四:编写业务代码
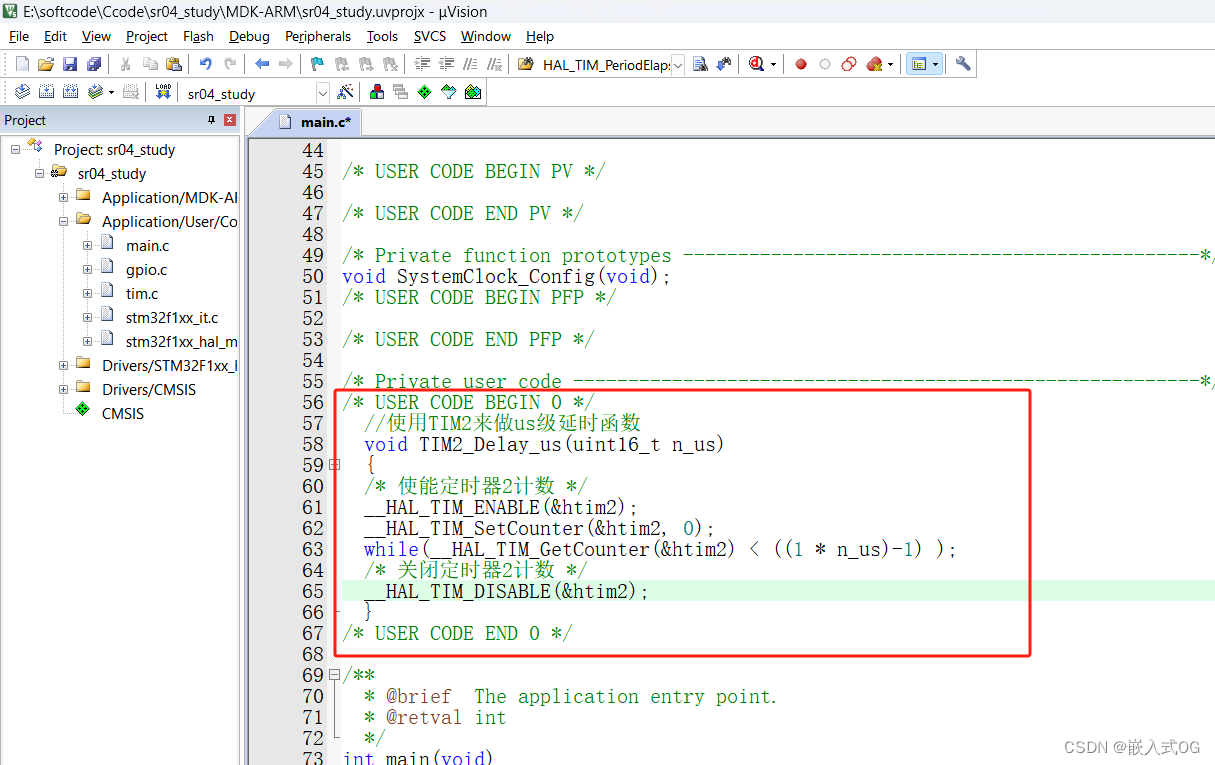
4.1、在初始化完成的代码之后添加业务代码
第①处增加的代码:编写微秒级函数
//使用TIM2来做us级延时函数
void TIM2_Delay_us(uint16_t n_us)
{
/* 使能定时器2计数 */
__HAL_TIM_ENABLE(&htim2);
__HAL_TIM_SetCounter(&htim2, 0);
while(__HAL_TIM_GetCounter(&htim2) < ((1 * n_us)-1) );
/* 关闭定时器2计数 */
__HAL_TIM_DISABLE(&htim2);
}
4.2、定义变量
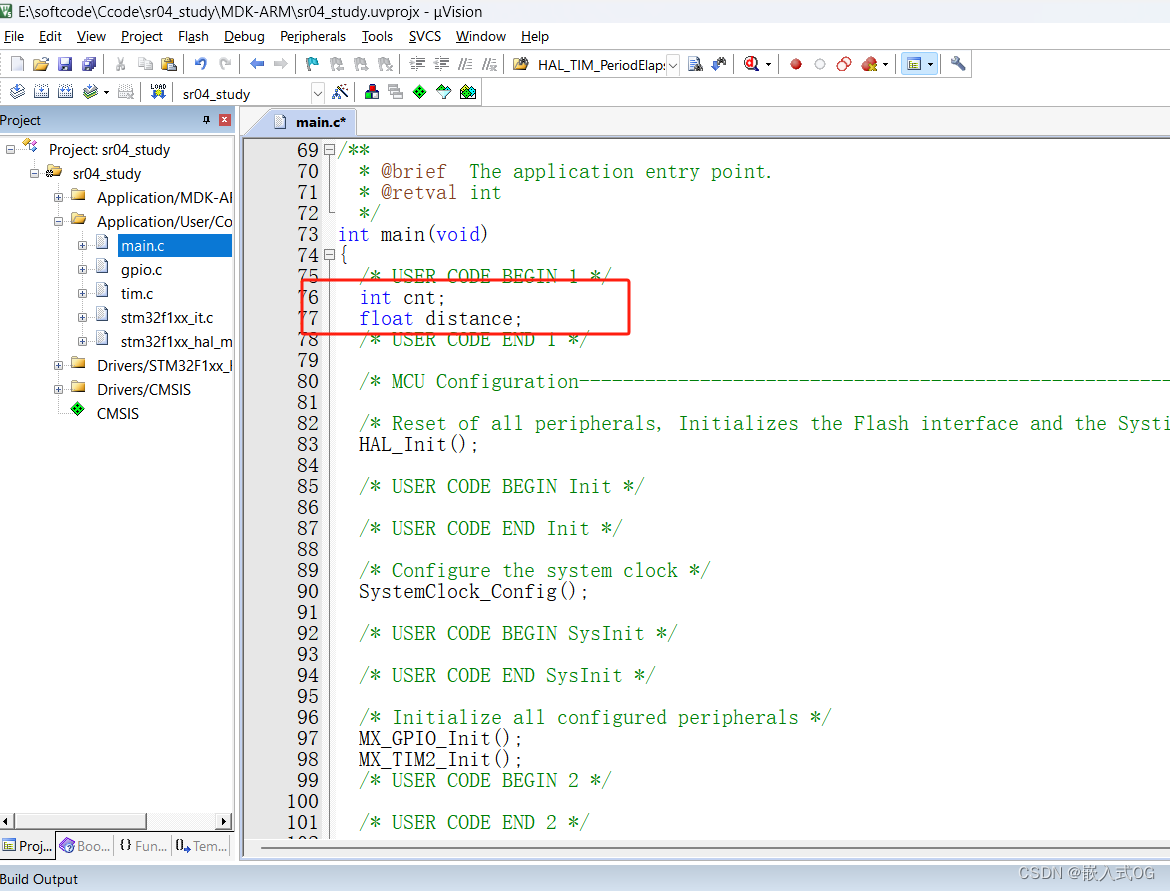
第②处增加的代码
/* USER CODE BEGIN 1 */int cnt;float distance;/* USER CODE END 1 */
4.3、主函数:
//1. Trig ,给Trig端口至少10us的高电平
//2. echo由低电平跳转到高电平,表示开始发送波
//波发出去的那一下,开始启动定时器
//3. 由高电平跳转回低电平,表示波回来了
//波回来的那一下,我们开始停止定时器
//4. 计算出中间经过多少时间
//5. 距离 = 速度 (340m/s)* 时间/2(注意单位换算)
(计数1次表示1us) //每500毫秒测试一次距离
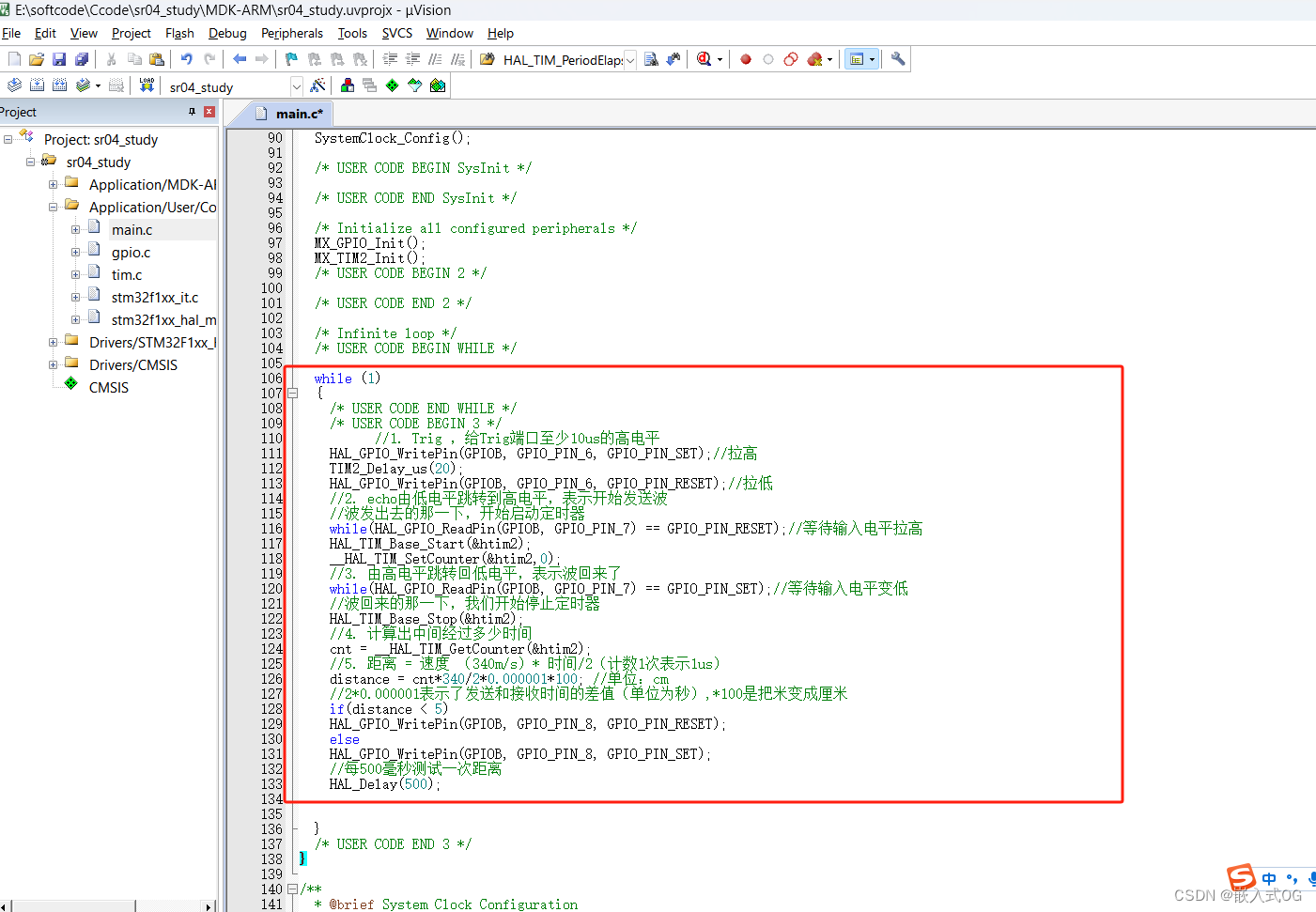
第③处增加的代码
while (1){/* USER CODE END WHILE *//* USER CODE BEGIN 3 *///1. Trig ,给Trig端口至少10us的高电平HAL_GPIO_WritePin(GPIOB, GPIO_PIN_6, GPIO_PIN_SET);//拉高TIM2_Delay_us(20);HAL_GPIO_WritePin(GPIOB, GPIO_PIN_6, GPIO_PIN_RESET);//拉低//2. echo由低电平跳转到高电平,表示开始发送波//波发出去的那一下,开始启动定时器while(HAL_GPIO_ReadPin(GPIOB, GPIO_PIN_7) == GPIO_PIN_RESET);//等待输入电平拉高HAL_TIM_Base_Start(&htim2);__HAL_TIM_SetCounter(&htim2,0);//3. 由高电平跳转回低电平,表示波回来了while(HAL_GPIO_ReadPin(GPIOB, GPIO_PIN_7) == GPIO_PIN_SET);//等待输入电平变低//波回来的那一下,我们开始停止定时器HAL_TIM_Base_Stop(&htim2);//4. 计算出中间经过多少时间cnt = __HAL_TIM_GetCounter(&htim2);//5. 距离 = 速度 (340m/s)* 时间/2(计数1次表示1us)distance = cnt*340/2*0.000001*100; //单位:cm//2*0.000001表示了发送和接收时间的差值(单位为秒),*100是把米变成厘米if(distance < 5)HAL_GPIO_WritePin(GPIOB, GPIO_PIN_8, GPIO_PIN_RESET);elseHAL_GPIO_WritePin(GPIOB, GPIO_PIN_8, GPIO_PIN_SET);//每500毫秒测试一次距离HAL_Delay(500);}/* USER CODE END 3 */
}
4.4、main.c总代码,直接复制可用
只有main.c有增加,下面的gpio.c、tim.c等等文件都没有变动
/* USER CODE BEGIN Header */
/********************************************************************************* @file : main.c* @brief : Main program body******************************************************************************* @attention** Copyright (c) 2023 STMicroelectronics.* All rights reserved.** This software is licensed under terms that can be found in the LICENSE file* in the root directory of this software component.* If no LICENSE file comes with this software, it is provided AS-IS.********************************************************************************/
/* USER CODE END Header */
/* Includes ------------------------------------------------------------------*/
#include "main.h"
#include "tim.h"
#include "gpio.h"/* Private includes ----------------------------------------------------------*/
/* USER CODE BEGIN Includes *//* USER CODE END Includes *//* Private typedef -----------------------------------------------------------*/
/* USER CODE BEGIN PTD *//* USER CODE END PTD *//* Private define ------------------------------------------------------------*/
/* USER CODE BEGIN PD */
/* USER CODE END PD *//* Private macro -------------------------------------------------------------*/
/* USER CODE BEGIN PM *//* USER CODE END PM *//* Private variables ---------------------------------------------------------*//* USER CODE BEGIN PV *//* USER CODE END PV *//* Private function prototypes -----------------------------------------------*/
void SystemClock_Config(void);
/* USER CODE BEGIN PFP *//* USER CODE END PFP *//* Private user code ---------------------------------------------------------*/
/* USER CODE BEGIN 0 *///使用TIM2来做us级延时函数void TIM2_Delay_us(uint16_t n_us){/* 使能定时器2计数 */__HAL_TIM_ENABLE(&htim2);__HAL_TIM_SetCounter(&htim2, 0);while(__HAL_TIM_GetCounter(&htim2) < ((1 * n_us)-1) );/* 关闭定时器2计数 */__HAL_TIM_DISABLE(&htim2);}
/* USER CODE END 0 *//*** @brief The application entry point.* @retval int*/
int main(void)
{/* USER CODE BEGIN 1 */int cnt;float distance;/* USER CODE END 1 *//* MCU Configuration--------------------------------------------------------*//* Reset of all peripherals, Initializes the Flash interface and the Systick. */HAL_Init();/* USER CODE BEGIN Init *//* USER CODE END Init *//* Configure the system clock */SystemClock_Config();/* USER CODE BEGIN SysInit *//* USER CODE END SysInit *//* Initialize all configured peripherals */MX_GPIO_Init();MX_TIM2_Init();/* USER CODE BEGIN 2 *//* USER CODE END 2 *//* Infinite loop *//* USER CODE BEGIN WHILE */while (1){/* USER CODE END WHILE *//* USER CODE BEGIN 3 *///1. Trig ,给Trig端口至少10us的高电平HAL_GPIO_WritePin(GPIOB, GPIO_PIN_6, GPIO_PIN_SET);//拉高TIM2_Delay_us(20);HAL_GPIO_WritePin(GPIOB, GPIO_PIN_6, GPIO_PIN_RESET);//拉低//2. echo由低电平跳转到高电平,表示开始发送波//波发出去的那一下,开始启动定时器while(HAL_GPIO_ReadPin(GPIOB, GPIO_PIN_7) == GPIO_PIN_RESET);//等待输入电平拉高HAL_TIM_Base_Start(&htim2);__HAL_TIM_SetCounter(&htim2,0);//3. 由高电平跳转回低电平,表示波回来了while(HAL_GPIO_ReadPin(GPIOB, GPIO_PIN_7) == GPIO_PIN_SET);//等待输入电平变低//波回来的那一下,我们开始停止定时器HAL_TIM_Base_Stop(&htim2);//4. 计算出中间经过多少时间cnt = __HAL_TIM_GetCounter(&htim2);//5. 距离 = 速度 (340m/s)* 时间/2(计数1次表示1us)distance = cnt*340/2*0.000001*100; //单位:cm//2*0.000001表示了发送和接收时间的差值(单位为秒),*100是把米变成厘米if(distance < 5)HAL_GPIO_WritePin(GPIOB, GPIO_PIN_8, GPIO_PIN_RESET);elseHAL_GPIO_WritePin(GPIOB, GPIO_PIN_8, GPIO_PIN_SET);//每500毫秒测试一次距离HAL_Delay(500);}/* USER CODE END 3 */
}/*** @brief System Clock Configuration* @retval None*/
void SystemClock_Config(void)
{RCC_OscInitTypeDef RCC_OscInitStruct = {0};RCC_ClkInitTypeDef RCC_ClkInitStruct = {0};/** Initializes the RCC Oscillators according to the specified parameters* in the RCC_OscInitTypeDef structure.*/RCC_OscInitStruct.OscillatorType = RCC_OSCILLATORTYPE_HSE;RCC_OscInitStruct.HSEState = RCC_HSE_ON;RCC_OscInitStruct.HSEPredivValue = RCC_HSE_PREDIV_DIV1;RCC_OscInitStruct.HSIState = RCC_HSI_ON;RCC_OscInitStruct.PLL.PLLState = RCC_PLL_ON;RCC_OscInitStruct.PLL.PLLSource = RCC_PLLSOURCE_HSE;RCC_OscInitStruct.PLL.PLLMUL = RCC_PLL_MUL9;if (HAL_RCC_OscConfig(&RCC_OscInitStruct) != HAL_OK){Error_Handler();}/** Initializes the CPU, AHB and APB buses clocks*/RCC_ClkInitStruct.ClockType = RCC_CLOCKTYPE_HCLK|RCC_CLOCKTYPE_SYSCLK|RCC_CLOCKTYPE_PCLK1|RCC_CLOCKTYPE_PCLK2;RCC_ClkInitStruct.SYSCLKSource = RCC_SYSCLKSOURCE_PLLCLK;RCC_ClkInitStruct.AHBCLKDivider = RCC_SYSCLK_DIV1;RCC_ClkInitStruct.APB1CLKDivider = RCC_HCLK_DIV2;RCC_ClkInitStruct.APB2CLKDivider = RCC_HCLK_DIV1;if (HAL_RCC_ClockConfig(&RCC_ClkInitStruct, FLASH_LATENCY_2) != HAL_OK){Error_Handler();}
}/* USER CODE BEGIN 4 *//* USER CODE END 4 *//*** @brief This function is executed in case of error occurrence.* @retval None*/
void Error_Handler(void)
{/* USER CODE BEGIN Error_Handler_Debug *//* User can add his own implementation to report the HAL error return state */__disable_irq();while (1){}/* USER CODE END Error_Handler_Debug */
}#ifdef USE_FULL_ASSERT
/*** @brief Reports the name of the source file and the source line number* where the assert_param error has occurred.* @param file: pointer to the source file name* @param line: assert_param error line source number* @retval None*/
void assert_failed(uint8_t *file, uint32_t line)
{/* USER CODE BEGIN 6 *//* User can add his own implementation to report the file name and line number,ex: printf("Wrong parameters value: file %s on line %d\r\n", file, line) *//* USER CODE END 6 */
}
#endif /* USE_FULL_ASSERT */4.5、gpio.c
/* USER CODE BEGIN Header */
/********************************************************************************* @file gpio.c* @brief This file provides code for the configuration* of all used GPIO pins.******************************************************************************* @attention** Copyright (c) 2023 STMicroelectronics.* All rights reserved.** This software is licensed under terms that can be found in the LICENSE file* in the root directory of this software component.* If no LICENSE file comes with this software, it is provided AS-IS.********************************************************************************/
/* USER CODE END Header *//* Includes ------------------------------------------------------------------*/
#include "gpio.h"/* USER CODE BEGIN 0 *//* USER CODE END 0 *//*----------------------------------------------------------------------------*/
/* Configure GPIO */
/*----------------------------------------------------------------------------*/
/* USER CODE BEGIN 1 *//* USER CODE END 1 *//** Configure pins as* Analog* Input* Output* EVENT_OUT* EXTI
*/
void MX_GPIO_Init(void)
{GPIO_InitTypeDef GPIO_InitStruct = {0};/* GPIO Ports Clock Enable */__HAL_RCC_GPIOD_CLK_ENABLE();__HAL_RCC_GPIOA_CLK_ENABLE();__HAL_RCC_GPIOB_CLK_ENABLE();/*Configure GPIO pin Output Level */HAL_GPIO_WritePin(GPIOB, GPIO_PIN_6, GPIO_PIN_RESET);/*Configure GPIO pin Output Level */HAL_GPIO_WritePin(GPIOB, GPIO_PIN_8, GPIO_PIN_SET);/*Configure GPIO pins : PB6 PB8 */GPIO_InitStruct.Pin = GPIO_PIN_6|GPIO_PIN_8;GPIO_InitStruct.Mode = GPIO_MODE_OUTPUT_PP;GPIO_InitStruct.Pull = GPIO_NOPULL;GPIO_InitStruct.Speed = GPIO_SPEED_FREQ_LOW;HAL_GPIO_Init(GPIOB, &GPIO_InitStruct);/*Configure GPIO pin : PB7 */GPIO_InitStruct.Pin = GPIO_PIN_7;GPIO_InitStruct.Mode = GPIO_MODE_INPUT;GPIO_InitStruct.Pull = GPIO_NOPULL;HAL_GPIO_Init(GPIOB, &GPIO_InitStruct);}/* USER CODE BEGIN 2 *//* USER CODE END 2 */4.6、tim.c
/* USER CODE BEGIN Header */
/********************************************************************************* @file tim.c* @brief This file provides code for the configuration* of the TIM instances.******************************************************************************* @attention** Copyright (c) 2023 STMicroelectronics.* All rights reserved.** This software is licensed under terms that can be found in the LICENSE file* in the root directory of this software component.* If no LICENSE file comes with this software, it is provided AS-IS.********************************************************************************/
/* USER CODE END Header */
/* Includes ------------------------------------------------------------------*/
#include "tim.h"/* USER CODE BEGIN 0 *//* USER CODE END 0 */TIM_HandleTypeDef htim2;/* TIM2 init function */
void MX_TIM2_Init(void)
{/* USER CODE BEGIN TIM2_Init 0 *//* USER CODE END TIM2_Init 0 */TIM_ClockConfigTypeDef sClockSourceConfig = {0};TIM_MasterConfigTypeDef sMasterConfig = {0};/* USER CODE BEGIN TIM2_Init 1 *//* USER CODE END TIM2_Init 1 */htim2.Instance = TIM2;htim2.Init.Prescaler = 71;htim2.Init.CounterMode = TIM_COUNTERMODE_UP;htim2.Init.Period = 65535;htim2.Init.ClockDivision = TIM_CLOCKDIVISION_DIV1;htim2.Init.AutoReloadPreload = TIM_AUTORELOAD_PRELOAD_ENABLE;if (HAL_TIM_Base_Init(&htim2) != HAL_OK){Error_Handler();}sClockSourceConfig.ClockSource = TIM_CLOCKSOURCE_INTERNAL;if (HAL_TIM_ConfigClockSource(&htim2, &sClockSourceConfig) != HAL_OK){Error_Handler();}sMasterConfig.MasterOutputTrigger = TIM_TRGO_RESET;sMasterConfig.MasterSlaveMode = TIM_MASTERSLAVEMODE_DISABLE;if (HAL_TIMEx_MasterConfigSynchronization(&htim2, &sMasterConfig) != HAL_OK){Error_Handler();}/* USER CODE BEGIN TIM2_Init 2 *//* USER CODE END TIM2_Init 2 */}void HAL_TIM_Base_MspInit(TIM_HandleTypeDef* tim_baseHandle)
{if(tim_baseHandle->Instance==TIM2){/* USER CODE BEGIN TIM2_MspInit 0 *//* USER CODE END TIM2_MspInit 0 *//* TIM2 clock enable */__HAL_RCC_TIM2_CLK_ENABLE();/* USER CODE BEGIN TIM2_MspInit 1 *//* USER CODE END TIM2_MspInit 1 */}
}void HAL_TIM_Base_MspDeInit(TIM_HandleTypeDef* tim_baseHandle)
{if(tim_baseHandle->Instance==TIM2){/* USER CODE BEGIN TIM2_MspDeInit 0 *//* USER CODE END TIM2_MspDeInit 0 *//* Peripheral clock disable */__HAL_RCC_TIM2_CLK_DISABLE();/* USER CODE BEGIN TIM2_MspDeInit 1 *//* USER CODE END TIM2_MspDeInit 1 */}
}/* USER CODE BEGIN 1 *//* USER CODE END 1 */4.7、stm32f1xx_it.c
/* USER CODE BEGIN Header */
/********************************************************************************* @file stm32f1xx_it.c* @brief Interrupt Service Routines.******************************************************************************* @attention** Copyright (c) 2023 STMicroelectronics.* All rights reserved.** This software is licensed under terms that can be found in the LICENSE file* in the root directory of this software component.* If no LICENSE file comes with this software, it is provided AS-IS.********************************************************************************/
/* USER CODE END Header *//* Includes ------------------------------------------------------------------*/
#include "main.h"
#include "stm32f1xx_it.h"
/* Private includes ----------------------------------------------------------*/
/* USER CODE BEGIN Includes */
/* USER CODE END Includes *//* Private typedef -----------------------------------------------------------*/
/* USER CODE BEGIN TD *//* USER CODE END TD *//* Private define ------------------------------------------------------------*/
/* USER CODE BEGIN PD *//* USER CODE END PD *//* Private macro -------------------------------------------------------------*/
/* USER CODE BEGIN PM *//* USER CODE END PM *//* Private variables ---------------------------------------------------------*/
/* USER CODE BEGIN PV *//* USER CODE END PV *//* Private function prototypes -----------------------------------------------*/
/* USER CODE BEGIN PFP *//* USER CODE END PFP *//* Private user code ---------------------------------------------------------*/
/* USER CODE BEGIN 0 *//* USER CODE END 0 *//* External variables --------------------------------------------------------*//* USER CODE BEGIN EV *//* USER CODE END EV *//******************************************************************************/
/* Cortex-M3 Processor Interruption and Exception Handlers */
/******************************************************************************/
/*** @brief This function handles Non maskable interrupt.*/
void NMI_Handler(void)
{/* USER CODE BEGIN NonMaskableInt_IRQn 0 *//* USER CODE END NonMaskableInt_IRQn 0 *//* USER CODE BEGIN NonMaskableInt_IRQn 1 */while (1){}/* USER CODE END NonMaskableInt_IRQn 1 */
}/*** @brief This function handles Hard fault interrupt.*/
void HardFault_Handler(void)
{/* USER CODE BEGIN HardFault_IRQn 0 *//* USER CODE END HardFault_IRQn 0 */while (1){/* USER CODE BEGIN W1_HardFault_IRQn 0 *//* USER CODE END W1_HardFault_IRQn 0 */}
}/*** @brief This function handles Memory management fault.*/
void MemManage_Handler(void)
{/* USER CODE BEGIN MemoryManagement_IRQn 0 *//* USER CODE END MemoryManagement_IRQn 0 */while (1){/* USER CODE BEGIN W1_MemoryManagement_IRQn 0 *//* USER CODE END W1_MemoryManagement_IRQn 0 */}
}/*** @brief This function handles Prefetch fault, memory access fault.*/
void BusFault_Handler(void)
{/* USER CODE BEGIN BusFault_IRQn 0 *//* USER CODE END BusFault_IRQn 0 */while (1){/* USER CODE BEGIN W1_BusFault_IRQn 0 *//* USER CODE END W1_BusFault_IRQn 0 */}
}/*** @brief This function handles Undefined instruction or illegal state.*/
void UsageFault_Handler(void)
{/* USER CODE BEGIN UsageFault_IRQn 0 *//* USER CODE END UsageFault_IRQn 0 */while (1){/* USER CODE BEGIN W1_UsageFault_IRQn 0 *//* USER CODE END W1_UsageFault_IRQn 0 */}
}/*** @brief This function handles System service call via SWI instruction.*/
void SVC_Handler(void)
{/* USER CODE BEGIN SVCall_IRQn 0 *//* USER CODE END SVCall_IRQn 0 *//* USER CODE BEGIN SVCall_IRQn 1 *//* USER CODE END SVCall_IRQn 1 */
}/*** @brief This function handles Debug monitor.*/
void DebugMon_Handler(void)
{/* USER CODE BEGIN DebugMonitor_IRQn 0 *//* USER CODE END DebugMonitor_IRQn 0 *//* USER CODE BEGIN DebugMonitor_IRQn 1 *//* USER CODE END DebugMonitor_IRQn 1 */
}/*** @brief This function handles Pendable request for system service.*/
void PendSV_Handler(void)
{/* USER CODE BEGIN PendSV_IRQn 0 *//* USER CODE END PendSV_IRQn 0 *//* USER CODE BEGIN PendSV_IRQn 1 *//* USER CODE END PendSV_IRQn 1 */
}/*** @brief This function handles System tick timer.*/
void SysTick_Handler(void)
{/* USER CODE BEGIN SysTick_IRQn 0 *//* USER CODE END SysTick_IRQn 0 */HAL_IncTick();/* USER CODE BEGIN SysTick_IRQn 1 *//* USER CODE END SysTick_IRQn 1 */
}/******************************************************************************/
/* STM32F1xx Peripheral Interrupt Handlers */
/* Add here the Interrupt Handlers for the used peripherals. */
/* For the available peripheral interrupt handler names, */
/* please refer to the startup file (startup_stm32f1xx.s). */
/******************************************************************************//* USER CODE BEGIN 1 *//* USER CODE END 1 */4.8、超声波测距效果
1.代码编译,烧录之后
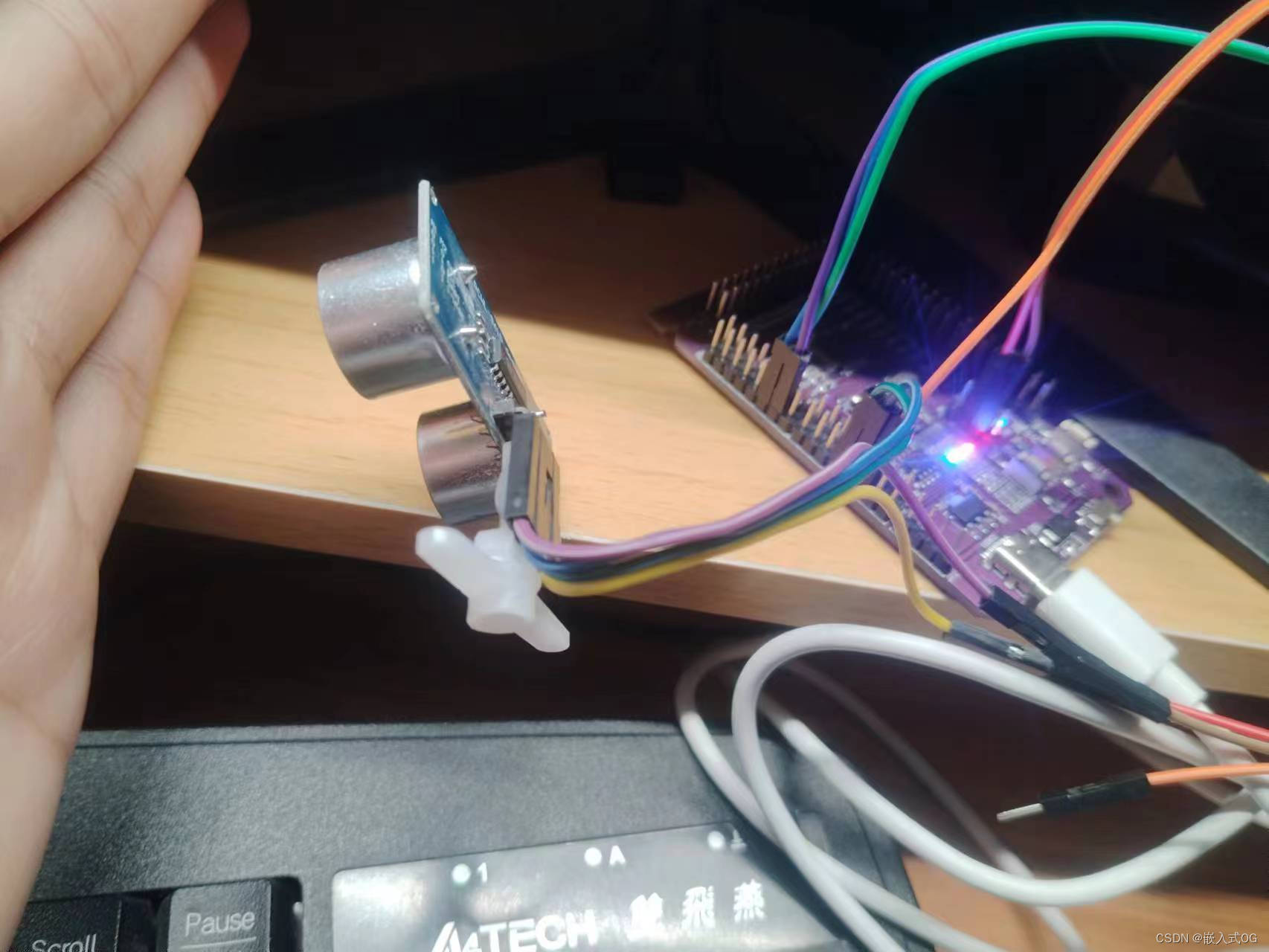
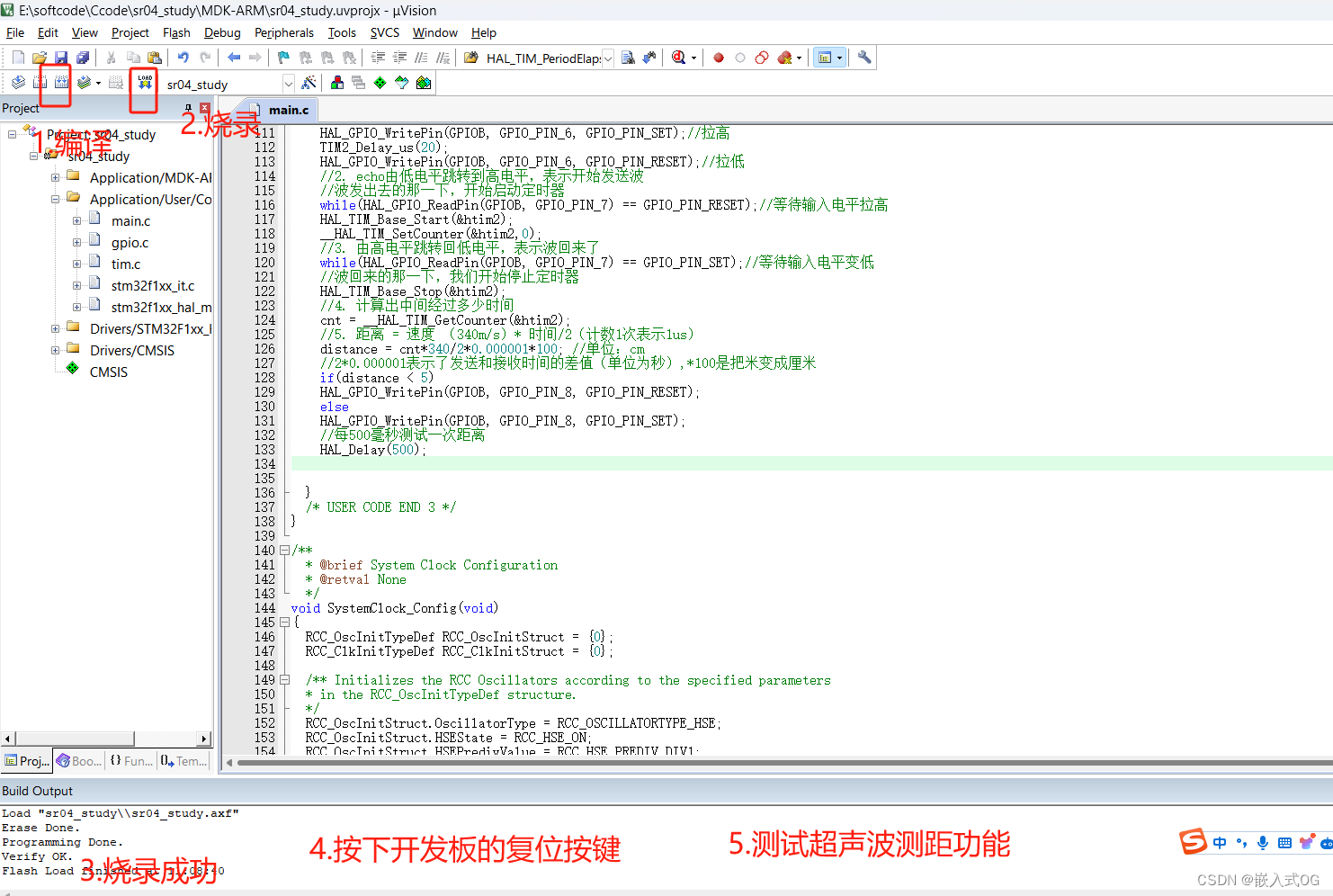 2.测试超声波测距
2.测试超声波测距
把手放在距离sr04 5cm以内,led灯会亮,再远灯会灭
以上,完
相关文章:
嵌入式-stm32-SR04超声波测距介绍及实战
一:超声波传感器介绍 1.1、SR04超声波测距硬件模块 1.2、SR04的四个IO口 vcc:提供电源5V gnd:接地 Trig:是**发送**声波信号的触发器 Echo:是**接收**回波信号的引脚 当TRIG信号被触发时,传感器会发送一定频率的声波信号,该信号被反射后&am…...

智能优化算法应用:基于白鲸算法3D无线传感器网络(WSN)覆盖优化 - 附代码
智能优化算法应用:基于白鲸算法3D无线传感器网络(WSN)覆盖优化 - 附代码 文章目录 智能优化算法应用:基于白鲸算法3D无线传感器网络(WSN)覆盖优化 - 附代码1.无线传感网络节点模型2.覆盖数学模型及分析3.白鲸算法4.实验参数设定5.算法结果6.参考文献7.MA…...

mac m1芯片 pytorch安装及gpu性能测试
pytorch 使用mac的m1芯片进行模型训练。 #小结:在数据量小和模型参数少,batch_size小时,cpu训练更快(原因:每次训练时数据需要放入GPU中,由于batch_size小。数据放入gpu比模型计算时间还长) 在…...

go 使用 - sync.WaitGroup
使用 - sync.WaitGroup 简介使用注意点 简介 waitgroup 是等待一组并发操作完成得方法。Goroutines对Go来说是独一无二的(尽管其他一些语言有类似的并发原语)。它们不是操作系统线程,它们不完全是绿色的线程(由语言运行时管理的线程)&#x…...

Java Web Day07-08_Layui
1. Layui概念介绍 layui(谐音:类 UI) 是一套开源的 Web UI 解决方案,采用自身经典的模块化规范,并遵循原生 HTML/CSS/JS 的开发方式,极易上手,拿来即用。其风格简约轻盈,而组件优雅丰盈&#x…...
暂时无法办理经营性ICP许可证)
阿里云华北3(张家口)暂时无法办理经营性ICP许可证
阿里云服务器的华北 3(张家口)地域暂时无法办理经营性ICP许可证,如有经营性ICP业务请勿选择此地域。如果需要办理经营性ICP业务的用户,不需要选择华北3(张家口)地域,可以选择华北2(北…...

八种常见顺序存储的算法
目录 1、线性枚举 1)问题描述 2)动图演示 3)示例说明 4)算法描述 5)源码详解 2、前缀和差分 1)问题描述 2)动图演示 3)样例分析 4)算法描述 5)源码…...

Leetcod面试经典150题刷题记录 —— 栈篇
Leetcod面试经典150题刷题记录 —— 栈篇 1. 有效的括号2. 简化路径3. 最小栈4. 逆波兰表达式求值5. 基本计算器 1. 有效的括号 题目链接:有效的括号 - leetcode 题目描述: 给定一个只包括 ( ,),{,},[&…...

【Qt-QThread-QQueue】
Qt编程指南 ■ QThread■ 示例■ QQueue■■■ QThread ■ 示例 #include <QThread> class myThread : public QThread {Q_OBJECT signals...
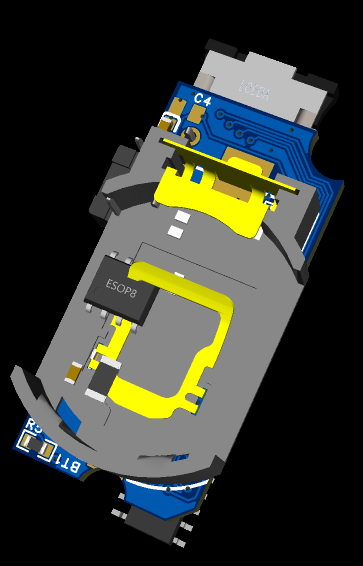
电子握力器改造
toy_hand_game 介绍 消耗体力玩具,使用握力器(Grip Strengthener)控制舵机旋转。 开始设想是控制丝杆电机滑动,两套设备就可以控制两个丝杆电机进行“模拟拔河”,后续发现硬件设计错误,ULN2003不能控制两相四线电机,…...

3D展2D数学原理
今年早些时候,我为 MAKE 杂志写了一篇教程,介绍如何制作视频游戏角色的毛绒动物。 该技术采用给定的角色 3D 模型及其纹理,并以编程方式生成缝纫图案。 虽然我已经编写了一般摘要并将源代码上传到 GitHub,但我在这里编写了对使这一…...
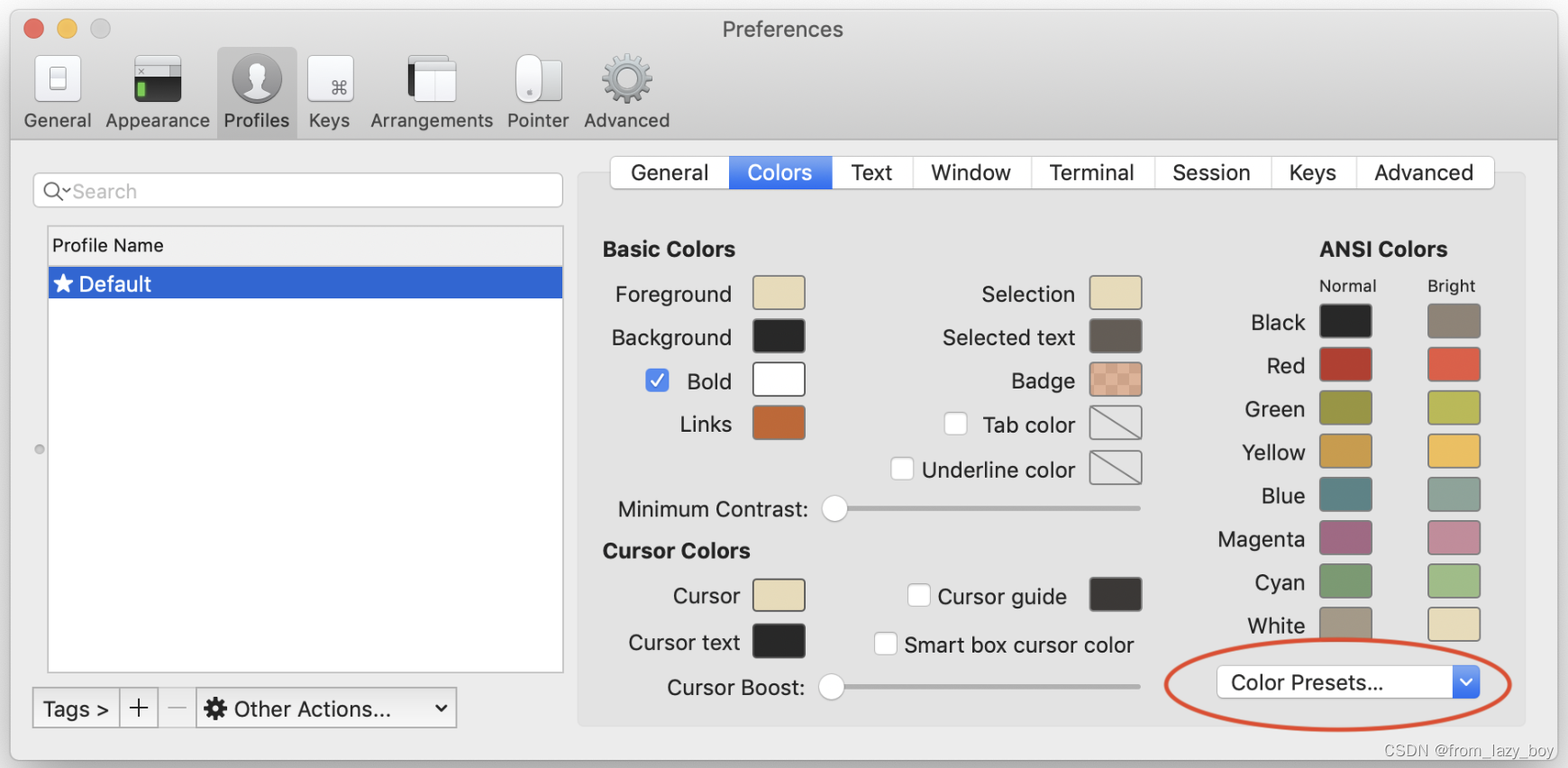
MacOS+Homebrew+iTerm2+oh my zsh+powerlevel10k美化教程
MacOS终端 你是否已厌倦了MacOS终端的大黑屏? 你是否对这种美观的终端抱有兴趣? 那么,接下来我将会教你用最简单的方式来搭建一套自己的终端。 Homebrew的安装 官网地址:Homebrew — The Missing Package Manager for macOS (o…...
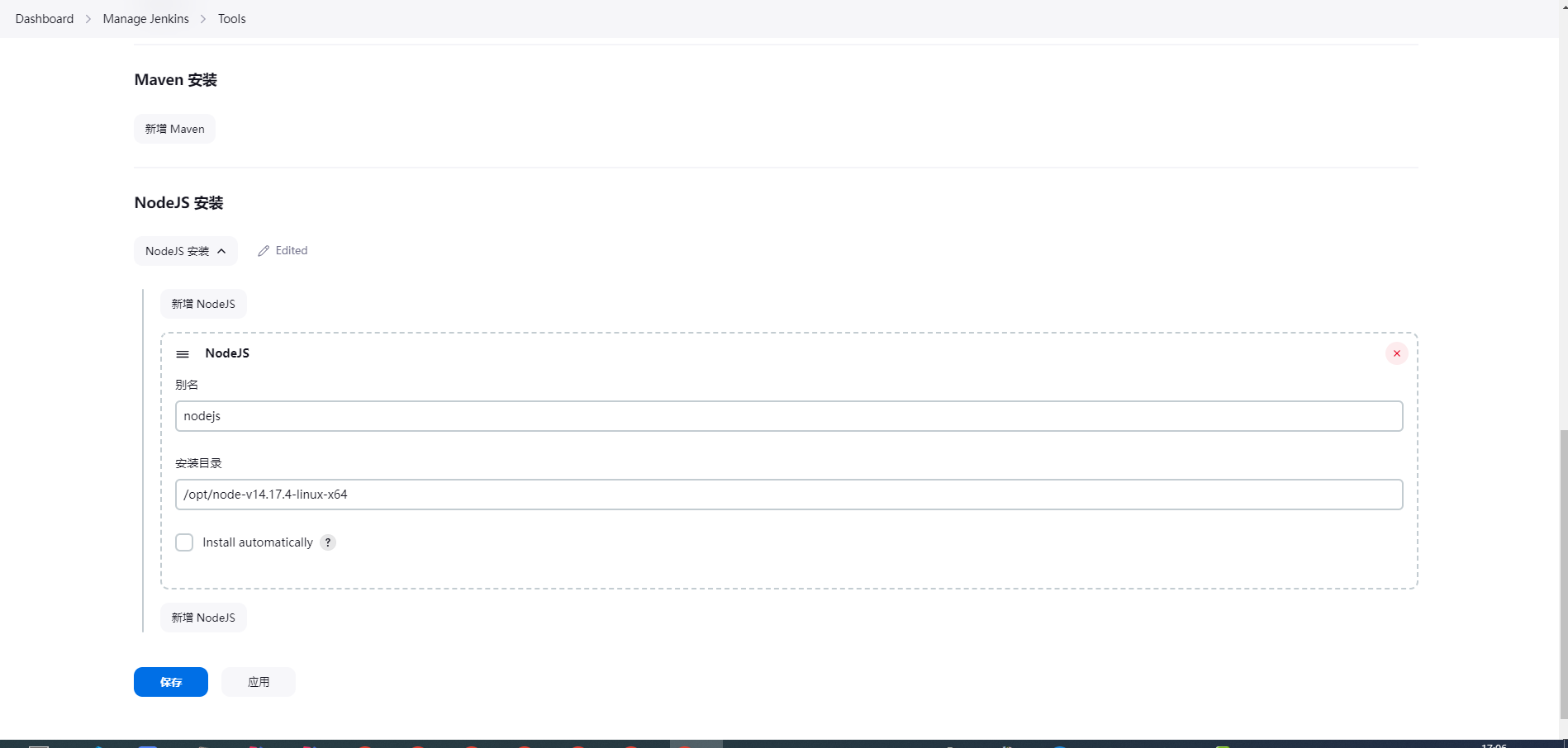
jenkins解决工具找不到的问题
--------------------------插件选择版本最好能跟服务器对上...
Android : 画布的使用 简单应用
示例图: MyView.java: package com.example.demo;import android.content.Context; import android.graphics.BitmapFactory; import android.graphics.Canvas; import android.graphics.Color; import android.graphics.Paint; import android.view.Vi…...

紫光展锐5G扬帆出海 | 东南亚成为5G新热土
东南亚是一块充满活力和潜力的市场,这里人口基数大、年轻消费群体占比高,电子市场在过去几年显著增长。 增速“狂飙”的东南亚手游 近年来,东南亚手游下载量逐年增长,2023 年第一季度下载量突破 21 亿次,贡献了全球近…...
STM32 学习(一)新建工程
本课程使用的stm32型号 引脚定义,有FT能接5v,没有FT能接3.3v 启动配置 第二种启动模式中,系统存储器中存放了一部分Bootloader程序,该程序可以接收串口的数据,然后刷新到主闪存中,这样就可以使用串口下载程…...

ROBOGUIDE教程:FANUC机器人固定点焊焊接虚拟仿真
目录 概述 机器人系统创建 焊接工件模型创建 机器人抓手工具添加与工件安装 工作台添加与工件安装 固定点焊焊枪支架模型创建与组装 固定点焊焊枪添加与配置 机器人远程TCP标定(核心内容) 远程TCP手动测试 远程TCP指令介绍 机器人仿真程序编写 机器人示教编程 机…...
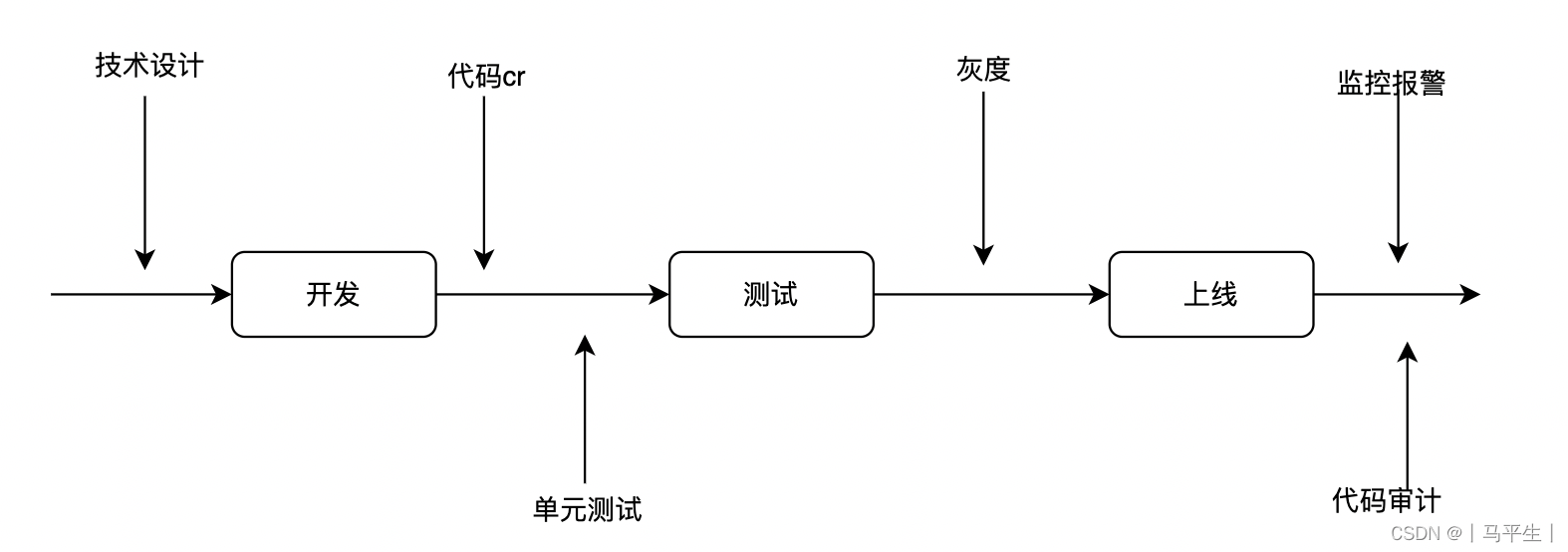
代码审计必要性探讨
1、背景 为了保证代码的质量,需要一系列的流程来进行保证: 今天要探讨的是代码审计的必要性。 2、代码审计 代码审计的做法多种多样,我理解必须解决以下问题 ,才可能有效: 核心:审计的本质是对比&#…...

SpringBoot-Shiro
Apache Shiro:https://shiro.apache.org/ 依赖 <dependency><groupId>org.apache.shiro</groupId><artifactId>shiro-spring</artifactId><version>1.4.1</version> </dependency>ShiroConfig.java Configuratio…...
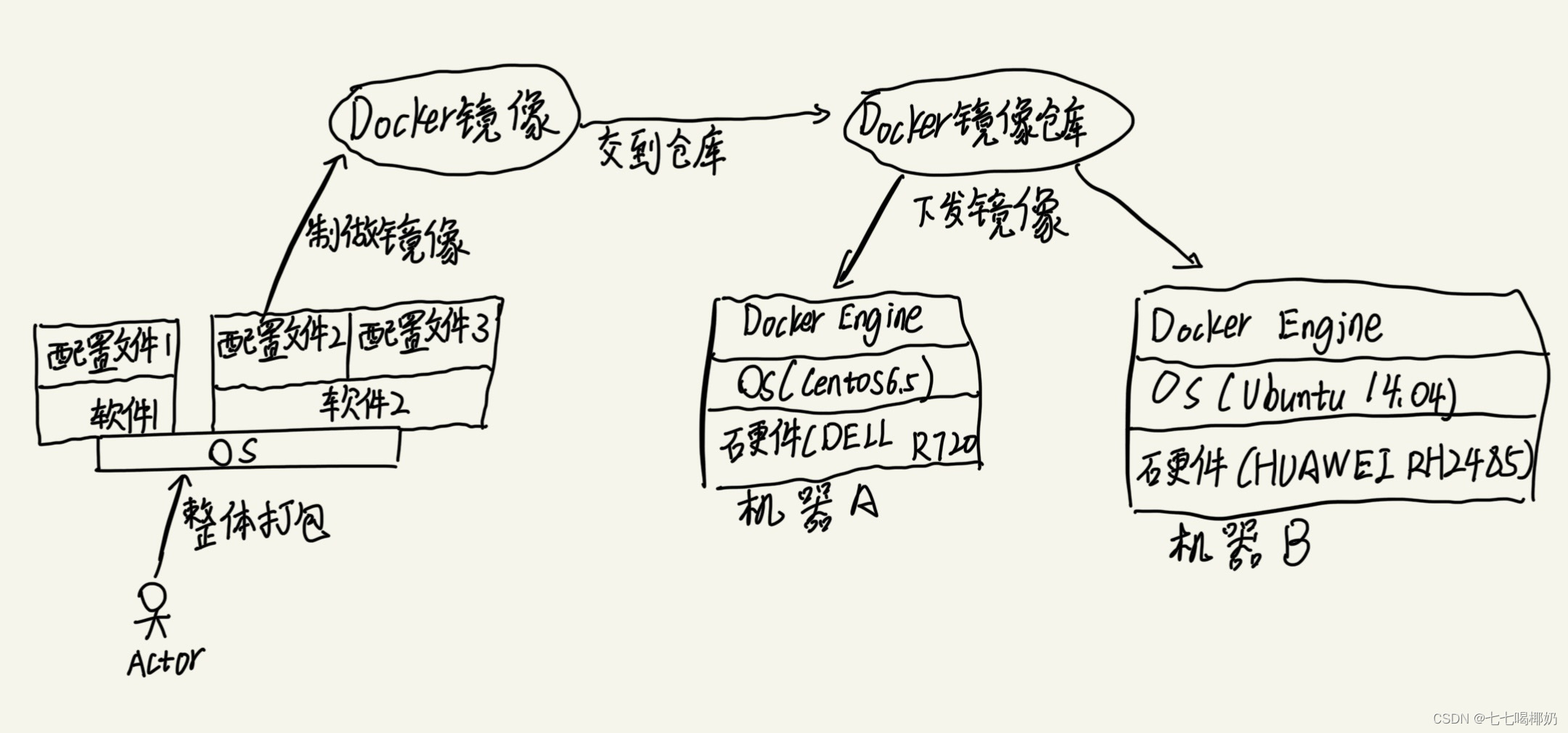
认识Docker
大家好,这里是七七,今天起开起我们的Docker技术篇,本文是介绍Docker的,不介绍如何使用和安装Docker,只是单纯的介绍Docker。 目录 一、历史 二、Docker究竟是什么 三、Docker的结构与特性 1、Docker仓库 2、Dock…...

Google关键词能带来多少流量?大词和长尾词的真实流量比例
一家销售软件的公司耗费六个月将“CRM”排至谷歌首页第五名。该词每月产生50万次搜索。网页获得2100次点击。跳出率高达89%。停留时间仅12秒。投入资金4万美元。获得零份询盘。做“外贸企业定制管理软件”排名首页第一。此词汇每月搜索量150次。每月收获62次点击。停留时间4分3…...

终极音乐歌词获取指南:163MusicLyrics让你的每首歌都有完美字幕
终极音乐歌词获取指南:163MusicLyrics让你的每首歌都有完美字幕 【免费下载链接】163MusicLyrics 云音乐歌词获取处理工具【网易云、QQ音乐】 项目地址: https://gitcode.com/GitHub_Trending/16/163MusicLyrics 还在为音乐播放器缺少歌词而烦恼?…...

第29天:Python发送邮件和短信
Python学习100天(从入门到精通系列文章) 文章目录 Python学习100天(从入门到精通系列文章) 前言 一、发送电子邮件 1.1 电子邮件与 SMTP 协议 1.2 配置邮件服务器 1.3 发送简单邮件 1.4 发送带附件的邮件 1.5 封装邮件发送函数 二、发送短信 2.1 短信发送场景 2.2 调用短信…...

Thorium浏览器实战指南:为什么这个Chromium分支能让你告别卡顿与隐私泄露?
Thorium浏览器实战指南:为什么这个Chromium分支能让你告别卡顿与隐私泄露? 【免费下载链接】thorium Chromium fork named after radioactive element No. 90. Source code and Linux releases. Windows/MacOS/ARM builds served in different repos, li…...

OpenRGB技术架构深度解析:如何用开源统一协议打破RGB生态壁垒
OpenRGB技术架构深度解析:如何用开源统一协议打破RGB生态壁垒 【免费下载链接】OpenRGB Open source RGB lighting control that doesnt depend on manufacturer software. Supports Windows, Linux, MacOS. Mirror of https://gitlab.com/CalcProgrammer1/OpenRGB.…...

昇思大模型垂域模型
昇思 MindSpore 垂域模型是基于通用大模型基座 行业数据微调 领域技术增强构建的行业专用 AI 模型,依托 MindSpore Transformers 套件与昇腾硬件,在医疗、金融、电力、法律、工业等领域实现深度落地,兼顾通用能力与行业专业性,训…...

i.MX6Q烧录翻车实录:从‘No Device Connected’到‘Push error’,我拔掉一个USB WiFi才搞定
i.MX6Q烧录实战:当USB设备冲突遇上OTG接口的排查指南 那天下午的阳光透过窗户斜射进实验室,我正对着i.MX6Q开发板进行例行固件更新。Mfgtools工具已经准备就绪,开发板电源接通,一切看起来都很完美——直到屏幕上跳出那个令人沮丧…...

Vue3后台管理系统终极指南:V3 Admin Vite 5.0快速上手教程
Vue3后台管理系统终极指南:V3 Admin Vite 5.0快速上手教程 【免费下载链接】v3-admin-vite ☀️ A crafted Vue3 admin template | Vue Admin | Vue Template | Vue3 Admin | Vue3 Template | Vue 后台 | Vue 模板 | Vue3 后台 | Vue3 模板 项目地址: https://git…...

无王无帝定乾坤,来自田间第一人 海棠山铁哥立标兴文脉
无王无帝定乾坤 ——来自田间第一人 一、破题:王权文脉之弊 旧序新局依附王权扎根民间权贵定义苍生共塑礼制浮华守心向善阶级垄断平等普惠文脉若随王朝而兴,必随王朝而竭; 唯有根植人心,方可生生不息。 二、田间崛起:…...

3分钟学会TV Bro浏览器:智能电视上网终极指南
3分钟学会TV Bro浏览器:智能电视上网终极指南 【免费下载链接】tv-bro Simple web browser for android optimized to use with TV remote 项目地址: https://gitcode.com/gh_mirrors/tv/tv-bro TV Bro是一款专为智能电视设计的安卓网页浏览器,通…...