超维空间S2无人机使用说明书——52、初级版——使用PID算法进行基于yolo的目标跟踪
引言:在实际工程项目中,为了提高系统的响应速度和稳定性,往往需要采用一定的控制算法进行目标跟踪。这里抛砖引玉,仅采用简单的PID算法进行目标的跟随控制,目标的识别依然采用yolo。对系统要求更高的,可以对算法进行改进,也欢迎读者与我们联系,合作开发。
步骤一:打开摄像头
注意:为了获取目标物的三维位置信息,我们采用了D435深度摄像头,仅供参考,可根据需要自行选择即可
roslaunch realsense2_camera rs_camera.launch
查看话题,需要/camera/color/image_raw和/camera/depth/image_rect_raw
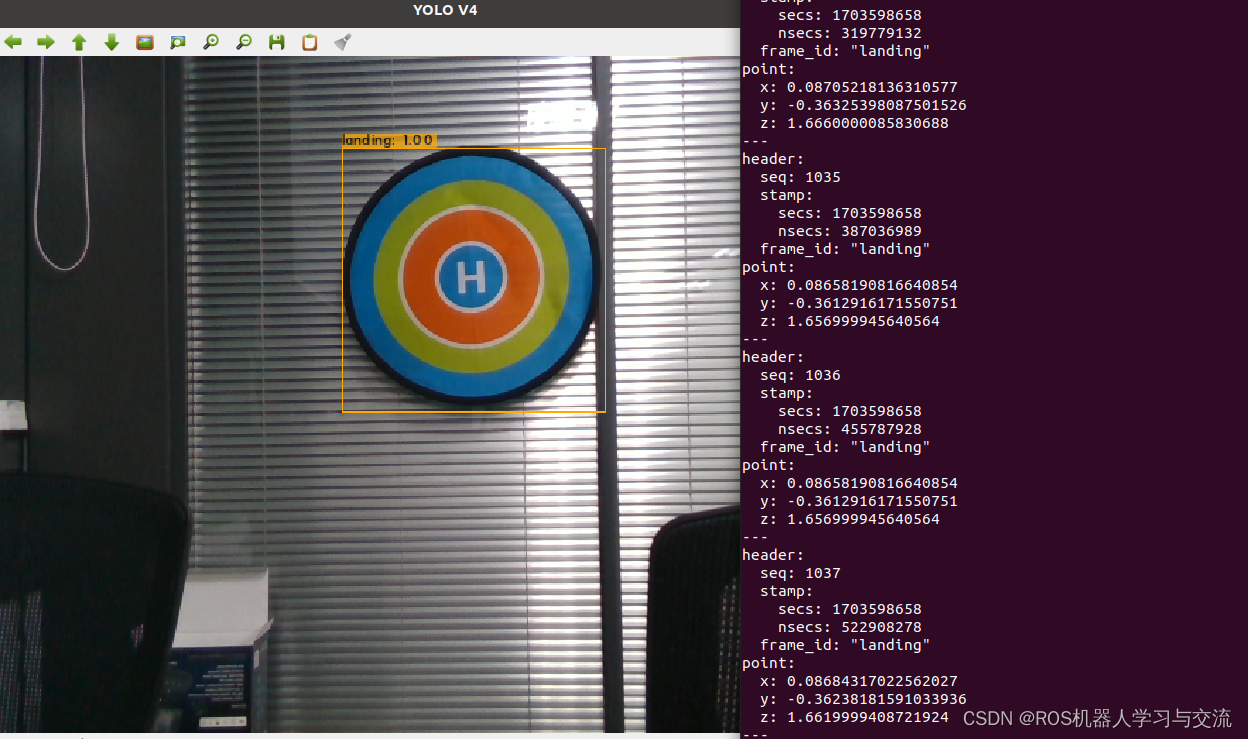
步骤二:打开yolo识别节点,具体yolo版本可以根据需要选择
roslaunch darknet_ros darknet_ros.launch
没有报错的情况下,会弹出识别效果图,如下:
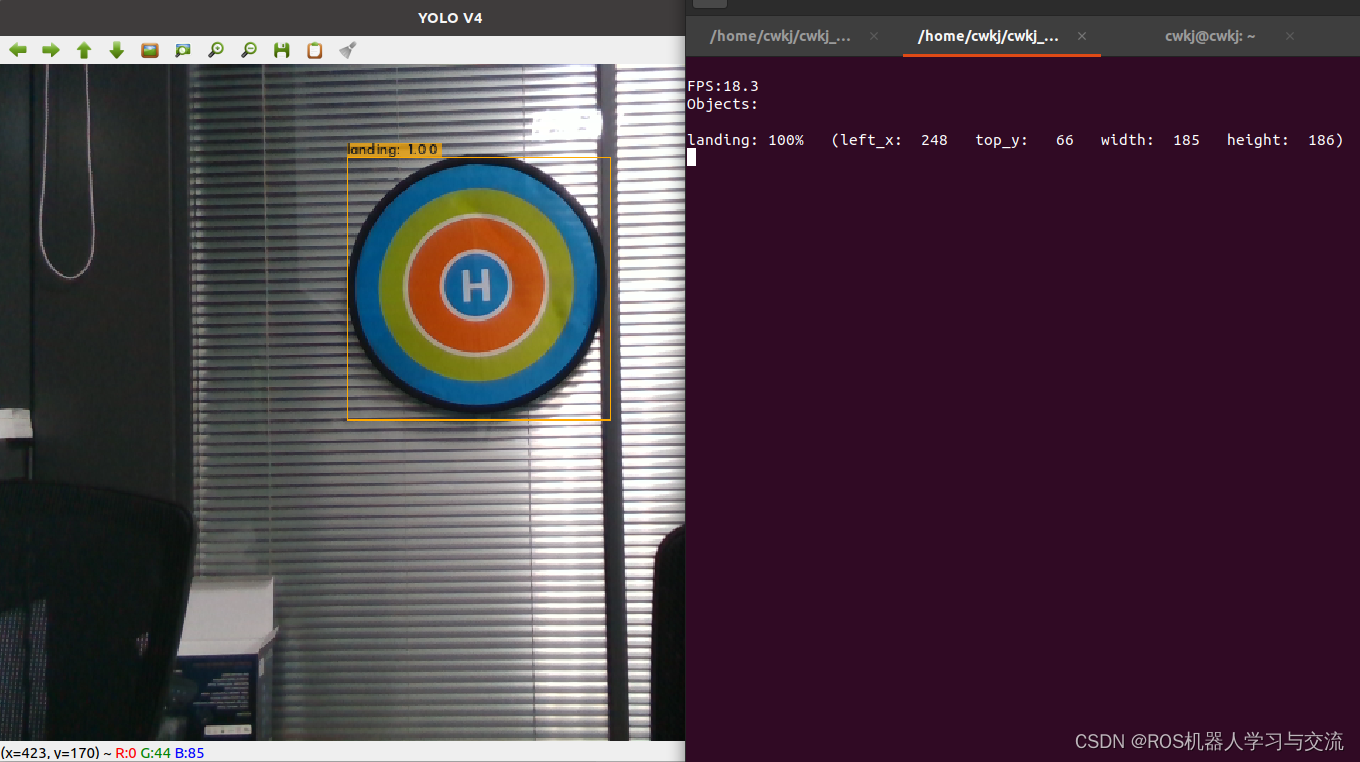 ## 注:我这里训练的是自己打印的H型地标,具体可以根据需要选择合适的目标物
## 注:我这里训练的是自己打印的H型地标,具体可以根据需要选择合适的目标物
步骤三:打开三维坐标转换节点
该节点可以直接一话题的形式输出目标物的名称和真实的位置信息
roslaunch darknet_real_position darknet_real_position.launch
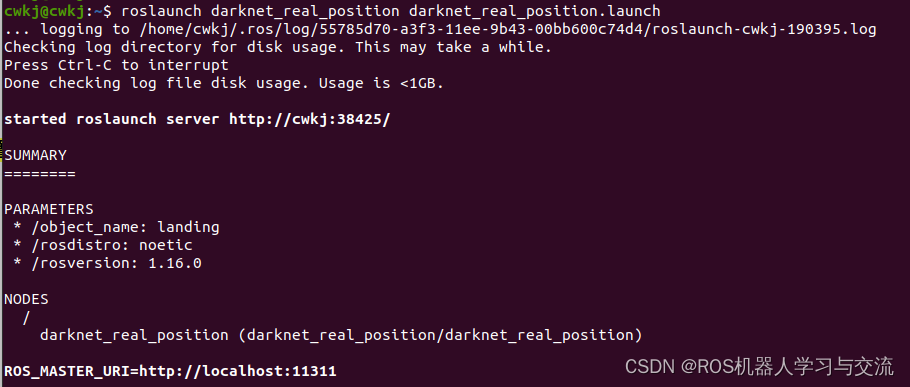
launch文件解析
此处的launch文件,以参数的方式指定了识别目标。比如landing,因此这个节点只会把指定的landing地标位置信息打印出来,其他的目标通通忽略

查看话题数据/object_position
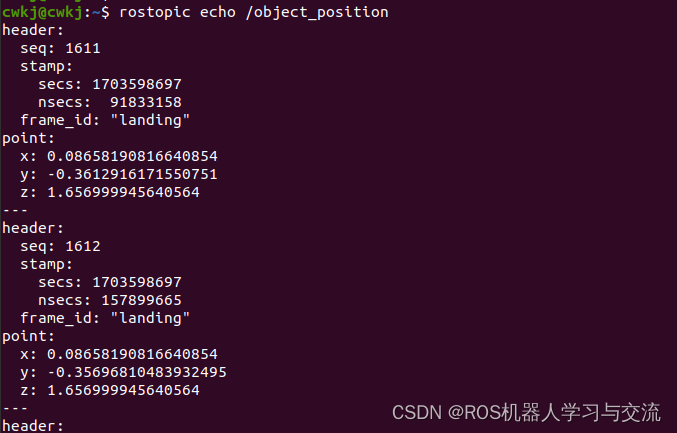
从上述图片可以看出,系统非常准确的给出了目标物的名称和真实的位置信息,单位是米。需要指出的是,这里的位置是相对于D435摄像头的位置信息,X表示横向位置,Y表示纵向位置,Z表示实际的距离信息
步骤四:启动PID跟随节点。注意,可以先不要启动mavros,仅仅测试PID控制器发布出的速度是否正确。在确认了没问题后在启动mavros节点,无人机就可以进行正常的跟随运动了
roslaunch follow_pid follow_pid.launch
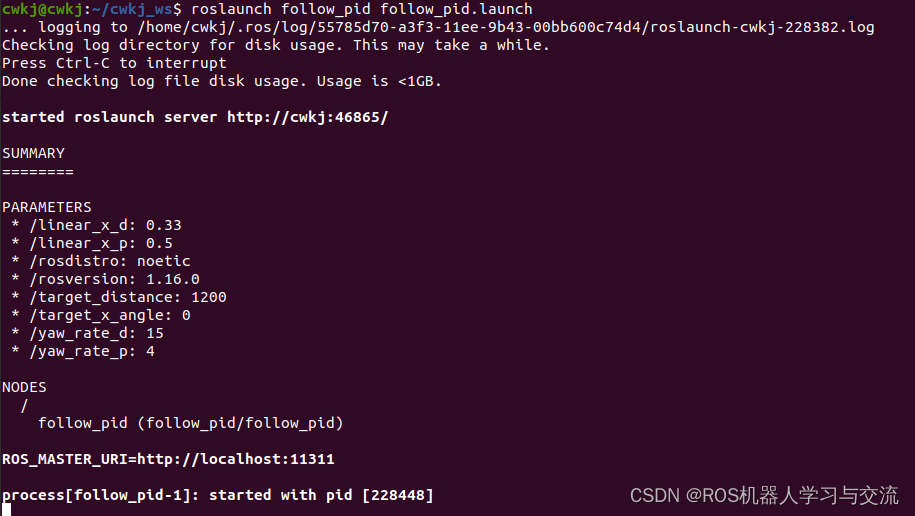
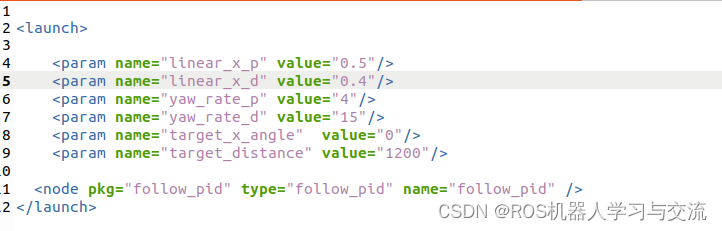
launch文件解析
这里仅仅进行偏航角度和距离的控制,如果需要对高度方向控制。可以直接复制代码进行简单的修改即可。参数linear_x_p和linear_x_d是距离的PID控制,同理yaw_rate_p和yaw_rate_d是角度的控制。参数target_x_angle是期望保持的角度,通常设置为0即可。最后参数target_distance是期望保持的距离,单位是毫米
代码如下:
#include <ros/ros.h>
#include <std_msgs/Bool.h>
#include <geometry_msgs/PoseStamped.h>
#include <geometry_msgs/TwistStamped.h>
#include <mavros_msgs/CommandBool.h>
#include <mavros_msgs/SetMode.h>
#include <mavros_msgs/State.h>
#include <mavros_msgs/PositionTarget.h>
#include <cmath>
#include <tf/transform_listener.h>
#include <nav_msgs/Odometry.h>
#include <mavros_msgs/CommandLong.h>
#include <string>#define MAX_ERROR 0.20
#define VEL_SET 0.10
#define ALTITUDE 0.40using namespace std;float target_x_angle = 0;
float target_distance = 2000;
float linear_x_p = 0.5;
float linear_x_d = 0.33;
float yaw_rate_p = 4.0;
float yaw_rate_d = 15;geometry_msgs::PointStamped object_pos;
nav_msgs::Odometry local_pos;
mavros_msgs::State current_state;
mavros_msgs::PositionTarget setpoint_raw;
//检测到的物体坐标值
string current_frame_id = "no_object";
double current_position_x = 0;
double current_position_y = 0;
double current_distance = 0;//1、订阅无人机状态话题
ros::Subscriber state_sub;//2、订阅无人机实时位置信息
ros::Subscriber local_pos_sub;//3、订阅实时位置信息
ros::Subscriber object_pos_sub;//4、发布无人机多维控制话题
ros::Publisher mavros_setpoint_pos_pub;//5、请求无人机解锁服务
ros::ServiceClient arming_client;//6、请求无人机设置飞行模式,本代码请求进入offboard
ros::ServiceClient set_mode_client;void pid_control()
{static float last_error_x_angle = 0;static float last_error_distance = 0; float x_angle;float distance;if(current_position_x == 0 && current_position_y == 0 && current_distance == 0){x_angle = target_x_angle;distance = target_distance;}else{x_angle = current_position_x / current_distance;distance = current_distance;}float error_x_angle = x_angle - target_x_angle;float error_distance = distance - target_distance;if(error_x_angle > -0.01 && error_x_angle < 0.01) {error_x_angle = 0;}if(error_distance > -80 && error_distance < 80) {error_distance = 0;}setpoint_raw.velocity.x = error_distance*linear_x_p/1000 + (error_distance - last_error_distance)*linear_x_d/1000;if(setpoint_raw.velocity.x < -0.3) {setpoint_raw.velocity.x = -0.3;}else if(setpoint_raw.velocity.x > 0.3) {setpoint_raw.velocity.x = 0.3; }setpoint_raw.yaw_rate = error_x_angle*yaw_rate_p + (error_x_angle - last_error_x_angle)*yaw_rate_d;if(setpoint_raw.yaw_rate < -0.5) {setpoint_raw.yaw_rate = -0.5;}else if(setpoint_raw.yaw_rate > 0.5) {setpoint_raw.yaw_rate = 0.5;}mavros_setpoint_pos_pub.publish(setpoint_raw);last_error_x_angle = error_x_angle;last_error_distance = error_distance;
}void state_cb(const mavros_msgs::State::ConstPtr& msg)
{current_state = *msg;
}void local_pos_cb(const nav_msgs::Odometry::ConstPtr& msg)
{local_pos = *msg;
}void object_pos_cb(const geometry_msgs::PointStamped::ConstPtr& msg)
{object_pos = *msg;current_position_x = object_pos.point.x*(-1000);current_position_y = object_pos.point.y*(-1000);//此处将距离由单位米改称毫米,方便提高控制精度current_distance = object_pos.point.z*1000;current_frame_id = object_pos.header.frame_id; pid_control(); //ROS_INFO("current_position_x = %f",current_position_x);//ROS_INFO("current_position_y = %f",current_position_y);//ROS_INFO("current_distance = %f" ,current_distance);
}int main(int argc, char *argv[])
{ros::init(argc, argv, "follow_pid");ros::NodeHandle nh;state_sub = nh.subscribe<mavros_msgs::State>("mavros/state", 100, state_cb);local_pos_sub = nh.subscribe<nav_msgs::Odometry>("/mavros/local_position/odom", 100, local_pos_cb);object_pos_sub = nh.subscribe<geometry_msgs::PointStamped>("object_position", 100, object_pos_cb);mavros_setpoint_pos_pub = nh.advertise<mavros_msgs::PositionTarget>("/mavros/setpoint_raw/local", 100); arming_client = nh.serviceClient<mavros_msgs::CommandBool>("mavros/cmd/arming");set_mode_client = nh.serviceClient<mavros_msgs::SetMode>("mavros/set_mode");ros::Rate rate(20.0); ros::param::get("linear_x_p",linear_x_p);ros::param::get("linear_x_d",linear_x_d);ros::param::get("yaw_rate_p",yaw_rate_p);ros::param::get("yaw_rate_d",yaw_rate_d);ros::param::get("target_x_angle", target_x_angle);ros::param::get("target_distance",target_distance);//等待连接到PX4无人机/* while(ros::ok() && current_state.connected){ros::spinOnce();rate.sleep();}*/setpoint_raw.type_mask = /*1 + 2 + 4 + 8 + 16 + 32*/ + 64 + 128 + 256 + 512 /*+ 1024 + 2048*/;setpoint_raw.coordinate_frame = 1;setpoint_raw.position.x = 0;setpoint_raw.position.y = 0;setpoint_raw.position.z = 0 + ALTITUDE;mavros_setpoint_pos_pub.publish(setpoint_raw);for(int i = 100; ros::ok() && i > 0; --i){mavros_setpoint_pos_pub.publish(setpoint_raw);ros::spinOnce();rate.sleep();}//请求offboard模式变量mavros_msgs::SetMode offb_set_mode;offb_set_mode.request.custom_mode = "OFFBOARD";//请求解锁变量mavros_msgs::CommandBool arm_cmd;arm_cmd.request.value = true;ros::Time last_request = ros::Time::now();//请求进入offboard模式并且解锁无人机,15秒后退出,防止重复请求 /*while(ros::ok()){//请求进入OFFBOARD模式if( current_state.mode != "OFFBOARD" && (ros::Time::now() - last_request > ros::Duration(5.0))){if( set_mode_client.call(offb_set_mode) && offb_set_mode.response.mode_sent){ROS_INFO("Offboard enabled");}last_request = ros::Time::now();}else {//请求解锁if( !current_state.armed && (ros::Time::now() - last_request > ros::Duration(5.0))){if( arming_client.call(arm_cmd) && arm_cmd.response.success){ROS_INFO("Vehicle armed");}last_request = ros::Time::now();}}if(ros::Time::now() - last_request > ros::Duration(15.0))break;mavros_setpoint_pos_pub.publish(setpoint_raw);ros::spinOnce();rate.sleep();}*/ while(ros::ok()){//ROS_INFO("11111");ros::spinOnce();rate.sleep();}}
步骤五:在上述基础上再打开mavros,即可开始跟随控制。代码后续会在B站进行讲解。同时会提供相应的实机演示。链接会在后续给出。
相关文章:
超维空间S2无人机使用说明书——52、初级版——使用PID算法进行基于yolo的目标跟踪
引言:在实际工程项目中,为了提高系统的响应速度和稳定性,往往需要采用一定的控制算法进行目标跟踪。这里抛砖引玉,仅采用简单的PID算法进行目标的跟随控制,目标的识别依然采用yolo。对系统要求更高的,可以对…...
<JavaEE> TCP 的通信机制(一) -- 确认应答 和 超时重传
目录 TCP的通信机制的核心特性 一、确认应答 1)什么是确认应答? 2)如何“确认”? 3)如何“应答”? 二、超时重传 1)丢包的概念 2)什么是超时重传? 3)…...
Spark任务调度与数据本地性
Apache Spark是一个分布式计算框架,用于处理大规模数据。了解Spark任务调度与数据本地性是构建高效分布式应用程序的关键。本文将深入探讨Spark任务调度的流程、数据本地性的重要性,并提供丰富的示例代码来帮助大家更好地理解这些概念。 Spark任务调度的…...

【论文阅读】Self-Paced Curriculum Learning
论文下载 代码 Supplementary Materials bib: INPROCEEDINGS{,title {Self-Paced Curriculum Learning},author {Lu Jiang and Deyu Meng and Qian Zhao and Shiguang Shan and Alexander Hauptmann},booktitle {AAAI},year {2015},pages {2694--2700} }1. 摘…...

C++简易线程池
原理说明: 1. 线程池创建时,指定线程池的大小thread_size。当有新的函数任务通过函数addFunction ()添加进来后,其中一个线程执行函数。一个线程一次执行一个函数。如果函数数量大与线程池数量,则后来的函数等待。 2. 线程池内部…...
【MATLAB】PSO粒子群优化LSTM(PSO_LSTM)的时间序列预测
有意向获取代码,请转文末观看代码获取方式~也可转原文链接获取~ 1 基本定义 PSO粒子群优化LSTM(PSO-LSTM)是一种将粒子群优化算法(PSO)与长短期记忆神经网络(LSTM)相结合的混合模型。该算法通过…...
产品经理学习-怎么写PRD文档
目录 瀑布流方法论介绍 产品需求文档(PRD)介绍 产品需求文档的基本要素 撰写产品需求文档 优先产品需求文档的特点 其他相关文档 瀑布流方法论介绍 瀑布流模型是一种项目的开发和管理的方法论,是敏捷的开发管理方式相对应的另一种方法…...
第3课 获取并播放音频流
本课对应源文件下载链接: https://download.csdn.net/download/XiBuQiuChong/88680079 FFmpeg作为一套庞大的音视频处理开源工具,其源码有太多值得研究的地方。但对于大多数初学者而言,如何快速利用相关的API写出自己想要的东西才是迫切需要…...
Spark编程实验四:Spark Streaming编程
目录 一、目的与要求 二、实验内容 三、实验步骤 1、利用Spark Streaming对三种类型的基本数据源的数据进行处理 2、利用Spark Streaming对Kafka高级数据源的数据进行处理 3、完成DStream的两种有状态转换操作 4、把DStream的数据输出保存到文本文件或MySQL数据库中 四…...

Flink去重计数统计用户数
1.数据 订单表,分别是店铺id、用户id和支付金额 "店铺id,用户id,支付金额", "shop-1,user-1,1", "shop-1,user-2,1", "shop-1,user-2,1", "shop-1,user-3,1", "shop-1,user-3,1", "shop-1,user…...
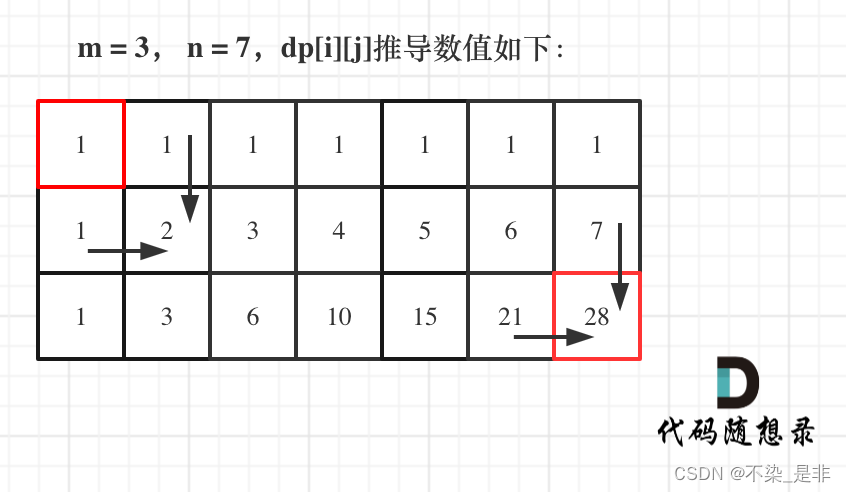
力扣:62. 不同路径(动态规划,附python二维数组的定义)
题目: 一个机器人位于一个 m x n 网格的左上角 (起始点在下图中标记为 “Start” )。 机器人每次只能向下或者向右移动一步。机器人试图达到网格的右下角(在下图中标记为 “Finish” )。 问总共有多少条不同的路径&…...
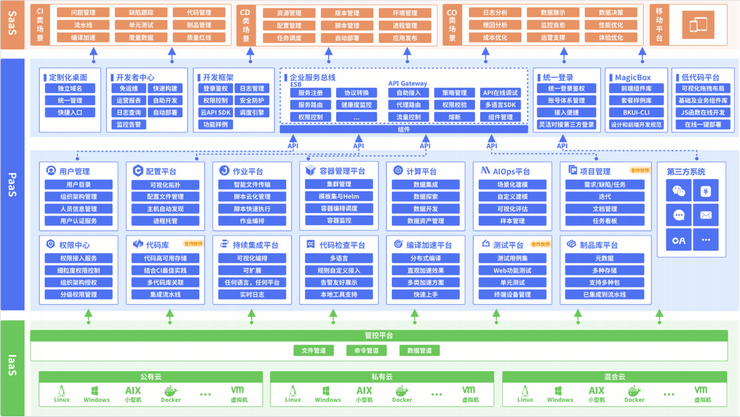
2022年全球运维大会(GOPS深圳站)-核心PPT资料下载
一、峰会简介 GOPS 主要面向运维行业的中高端技术人员,包括运维、开发、测试、架构师等群体。目的在于帮助IT技术从业者系统学习了解相关知识体系,让创新技术推动社会进步。您将会看到国内外知名企业的相关技术案例,也能与国内顶尖的技术专家…...

8868体育助力意甲罗马俱乐部 迪巴拉有望付出
8868体育助力意甲罗马俱乐部 迪巴拉有望付出 意甲罗马俱乐部是8868体育合作球队之一,本赛季,在意甲第14轮的比赛中,罗马客场2-1战胜萨索洛,积分上升到意甲第4位。 有报道称,迪巴拉在对阵佛罗伦萨的比赛中受伤ÿ…...

java设计模式实战【策略模式+观察者模式+命令模式+组合模式,混合模式在支付系统中的应用】
引言 在代码开发的世界里,理论知识的重要性毋庸置疑,但实战经验往往才是知识的真正试金石。正所谓,“读万卷书不如行万里路”,理论的学习需要通过实践来验证和深化。设计模式作为软件开发中的重要理论,其真正的价值在…...

小程序wx:if 和hidden的区别?
在小程序中,wx:if 和 hidden 是用于条件渲染的两种不同方式。 选择使用哪种方式取决于具体情况。如果条件变化频繁或节点包含复杂的子节点,可以考虑使用 wx:if 进行条件渲染;如果条件变化较少且节点结构简单,可以使用 hidden 控制…...
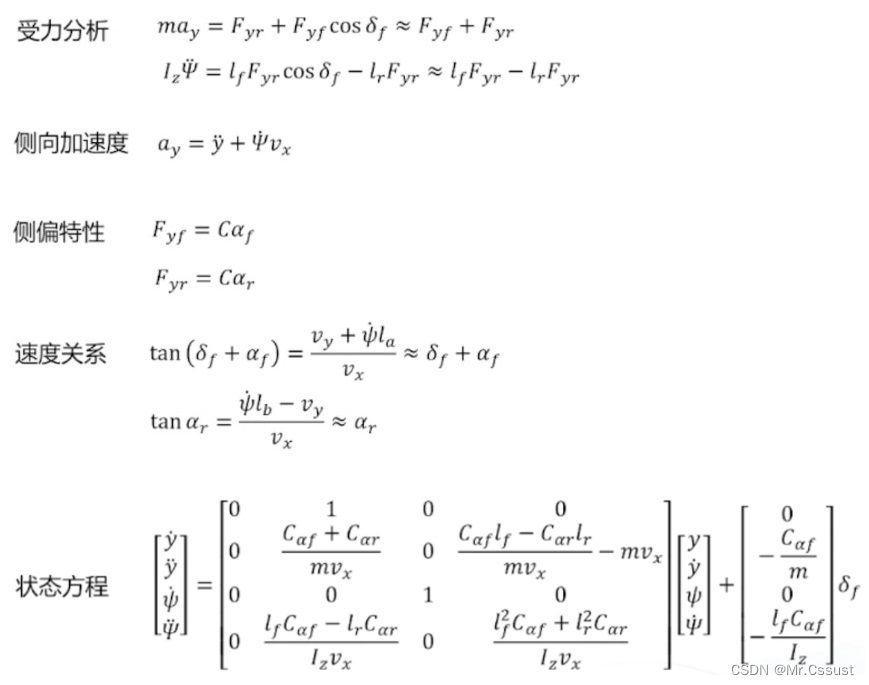
自动驾驶学习笔记(二十三)——车辆控制模型
#Apollo开发者# 学习课程的传送门如下,当您也准备学习自动驾驶时,可以和我一同前往: 《自动驾驶新人之旅》免费课程—> 传送门 《Apollo开放平台9.0专项技术公开课》免费报名—>传送门 文章目录 前言 运动学模型 动力学模型 总结…...

Linux Shell 015-文本双向覆盖重定向工具tee
Linux Shell 015-文本双向覆盖重定向工具tee 本节关键字:Linux、Bash Shell、文本双向覆盖重定向工具 相关指令:tee、echo、cat tee介绍 tee工具是从标准输入读取并写入到标准输出和文件,即:双向覆盖重定向(屏幕输出…...
【PyQt】(自定义类)QIcon派生,更易用的纯色Icon
嫌Qt自带的icon太丑,自己写了一个,主要用于纯色图标的自由改色。 当然,图标素材得网上找。 Qt原生图标与现代图标对比: 没有对比就没有伤害 Qt图标 网络素材图标 自定义类XJQ_Icon: from PyQt5.QtGui import QIc…...

【mysql】数据处理格式化、转换、判断
数据处理 判断是否超时,时间是否大于当前时间计算分钟数时间格式化处理如果数值类型进行转换字符类型字符拼接case-when代替if-else判断数据空(特殊:含空数据、空字符处理) select /*判断是否超时,时间是否大于当前…...

深入探索Java中的UDP网络通信机制
在网络通信中,UDP(User Datagram Protocol,用户数据报协议)是一种无连接的协议,它在某些情况下比TCP更适合,尤其是在要求速度快、对数据准确性要求相对较低的场景下。本文将介绍如何使用Java进行UDP网络通信…...

Crystal语言Web框架实战:构建高性能API服务的轻量级方案
1. 项目概述:一个轻量级、高性能的Crystal语言Web框架最近在探索一些新兴的编程语言生态时,我注意到了Crystal语言,以及一个名为jvpflum/Crystal的GitHub仓库。乍一看这个标题,可能会让人有些困惑:这究竟是Crystal语言…...

学术生产力革命已来,NotebookLM Agent如何把文献综述时间压缩83%?实测数据首次公开!
更多请点击: https://intelliparadigm.com 第一章:NotebookLM Agent研究辅助 NotebookLM 是 Google 推出的基于用户上传文档进行深度理解与推理的 AI 助手,其内置的 Agent 能力可显著提升学术研究、技术调研与知识整合效率。当启用 Agent 模…...

移动网络安全盲区:Windows PC成恶意软件主要源头与防御策略
1. 一个被忽视的真相:移动网络中的“隐形杀手”如果你和我一样,长期关注网络安全,尤其是移动安全领域,那你可能已经习惯了各种关于安卓恶意软件激增、iOS漏洞被利用的警报。媒体头条也总是被“史上最危险手机病毒”这样的标题占据…...

企业内网应用如何安全合规地集成外部大模型API服务
🚀 告别海外账号与网络限制!稳定直连全球优质大模型,限时半价接入中。 👉 点击领取海量免费额度 企业内网应用如何安全合规地集成外部大模型API服务 在构建内部AI工具时,企业开发团队面临一个核心挑战:如何…...

从零搭建VGG16:深入解析网络架构与PyTorch实战
1. VGG16网络架构解析 VGG16作为卷积神经网络发展史上的里程碑,其核心设计理念至今仍影响着现代深度学习模型。我第一次接触这个网络时,被它简洁优雅的结构深深吸引——全部使用33小卷积核堆叠,配合22最大池化,这种设计就像用乐高…...

电子仪器CE标志合规:从技术文件到尽职调查的完整指南
1. CE标志合规:从品牌声誉到技术文件的完整闭环在电子设计与制造领域,无论你开发的是精密的数据采集卡、复杂的信号发生器,还是看似简单的万用表,只要你的产品最终要进入欧洲经济区(EEA)市场,CE…...

终极指南:如何使用Harepacker-resurrected打造你的MapleStory游戏Mod
终极指南:如何使用Harepacker-resurrected打造你的MapleStory游戏Mod 【免费下载链接】Harepacker-resurrected All in one .wz file/map editor for MapleStory game files 项目地址: https://gitcode.com/gh_mirrors/ha/Harepacker-resurrected 如果你是一…...
)
别再乱打包了!手把手教你用Kali Linux和Metasploit生成免杀后门(附实战演示)
Kali Linux高级免杀技术实战:从原理到绕过Windows Defender 在渗透测试和红队演练中,后门程序的免杀能力直接决定了行动的成败。许多初学者在使用Metasploit生成基础payload后,常常发现它们被主流杀毒软件轻易拦截。本文将深入探讨免杀技术的…...

如何高效使用炉石传说脚本:终极完整指南解决你的自动化难题
如何高效使用炉石传说脚本:终极完整指南解决你的自动化难题 【免费下载链接】Hearthstone-Script Hearthstone script(炉石传说脚本) 项目地址: https://gitcode.com/gh_mirrors/he/Hearthstone-Script 你是否厌倦了炉石传说中重复性的…...

论文降AIGC教程:从标红区到安全线,2026最新3步攻略与工具测评
今年的交稿季有一点很磨人:除了文章重复率,AIGC检测率几乎也成了各处的标配,很多小伙伴接到通知直接懵了。 我之前也有过长文盲改失败的经历:刚拿到初稿就开始一通操作,觉得把文段里面的词语换换同义词就行࿰…...