STM32 基于 MPU6050 的飞行器姿态控制设计与实现
基于STM32的MPU6050姿态控制设计是无人机、飞行器等飞行器件开发中的核心技术之一。在本文中,我们将介绍如何利用STM32和MPU6050实现飞行器的姿态控制,并提供相应的代码示例。
1. 硬件连接及库配置
首先,我们需要将MPU6050连接到STM32微控制器上。MPU6050一般通过I2C接口与STM32连接,因此需要配置相应的GPIO和I2C硬件。另外,我们还需要使用相应的I2C驱动库来进行通讯,通常是通过ST公司提供的STM32Cube库来完成。
以下是一个简单的I2C硬件初始化示例(基于STM32Cube HAL库):
```c
void I2C_Init() {hi2c.Instance = I2C1;hi2c.Init.Timing = 0x00707CBB;hi2c.Init.OwnAddress1 = 0;hi2c.Init.AddressingMode = I2C_ADDRESSINGMODE_7BIT;hi2c.Init.DualAddressMode = I2C_DUALADDRESS_DISABLE;hi2c.Init.OwnAddress2 = 0;hi2c.Init.OwnAddress2Masks = I2C_OA2_NOMASK;hi2c.Init.GeneralCallMode = I2C_GENERALCALL_DISABLE;hi2c.Init.NoStretchMode = I2C_NOSTRETCH_DISABLE;if (HAL_I2C_Init(&hi2c) != HAL_OK) {Error_Handler();}
}
```2. 获取 MPU6050 加速度和陀螺仪数据
一旦硬件和库配置完成,我们可以通过I2C通信协议获取MPU6050的加速度和陀螺仪数据。
```c
// 读取MPU6050数据
void MPU6050_ReadData(int16_t* accelerometerData, int16_t* gyroscopeData) {uint8_t buffer[14];HAL_I2C_Mem_Read(&hi2c, MPU6050_ADDRESS, ACCEL_XOUT_H_REG, I2C_MEMADD_SIZE_8BIT, buffer, 14, 100);// 解析加速度计数据accelerometerData[0] = (int16_t)((buffer[0] << 8) | buffer[1]);accelerometerData[1] = (int16_t)((buffer[2] << 8) | buffer[3]);accelerometerData[2] = (int16_t)((buffer[4] << 8) | buffer[5]);// 解析陀螺仪数据gyroscopeData[0] = (int16_t)((buffer[8] << 8) | buffer[9]);gyroscopeData[1] = (int16_t)((buffer[10] << 8) | buffer[11]);gyroscopeData[2] = (int16_t)((buffer[12] << 8) | buffer[13]);
}
```3. 姿态控制算法
姿态控制是通过融合加速度计和陀螺仪的数据来控制飞行器的姿态。一种常用的姿态控制算法是PID(Proportional-Integral-Derivative,比例-积分-微分)控制器。PID算法可根据当前姿态误差的大小调整飞行器的控制输出。
以下是一个简单的PID控制器示例:
```c
#define KP 0.5f // 比例系数
#define KI 0.2f // 积分系数
#define KD 0.1f // 微分系数float error = 0.0f;
float integral = 0.0f;
float derivative = 0.0f;
float previousError = 0.0f;
float controlOutput = 0.0f;// PID控制器
float PIDController(float target, float current, float dt) {error = target - current;integral += error * dt;derivative = (error - previousError) / dt;controlOutput = KP * error + KI * integral + KD * derivative;previousError = error;return controlOutput;
}
```4. 应用示例
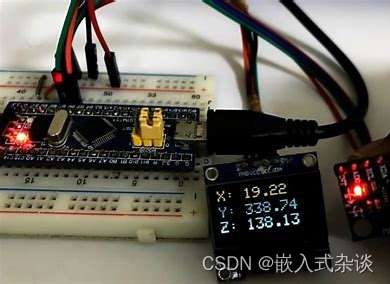
基于上述的MPU6050数据获取和姿态控制算法,我们可以实现飞行器的姿态控制。具体而言,我们可以将控制输出与飞行器的电机和舵机进行关联,实现对飞行器的姿态调整和稳定控制。
5. 总结
基于STM32和MPU6050实现飞行器的姿态控制是一个复杂而有挑战性的任务。除了上述提到的硬件配置和算法实现,还需要考虑校准和滤波等细节问题。希望这篇文章对于基于STM32的MPU6050飞行器姿态控制设计与实现有所帮助。请注意,由于代码的完整性和特定项目的环境要求,上述示例代码可能需要根据实际情况进行修改和优化。
✅作者简介:热爱科研的嵌入式开发者,修心和技术同步精进
代码获取、问题探讨及文章转载可私信。
☁ 愿你的生命中有够多的云翳,来造就一个美丽的黄昏。
🍎获取更多嵌入式资料可点击链接进群领取,谢谢支持!👇
点击领取更多详细资料
相关文章:
STM32 基于 MPU6050 的飞行器姿态控制设计与实现
基于STM32的MPU6050姿态控制设计是无人机、飞行器等飞行器件开发中的核心技术之一。在本文中,我们将介绍如何利用STM32和MPU6050实现飞行器的姿态控制,并提供相应的代码示例。 1. 硬件连接及库配置 首先,我们需要将MPU6050连接到STM32微控制…...

大数据平台Bug Bash大扫除最佳实践
一、背景 随着越来越多的"新人"在日常工作以及大促备战中担当大任,我们发现仅了解自身系统业务已不能满足日常系统开发运维需求。为此,大数据平台部门组织了一次Bug Bash活动,既能提升自己对兄弟产品的理解和使用,又能…...

JavaScript 中的数组过滤
在构建动态和交互式程序时,您可能需要添加一些交互式功能。例如,用户单击按钮以筛选一长串项目。 您可能还需要处理大量数据,以仅返回与指定条件匹配的项目。 在本文中,您将学习如何使用两种主要方法在 JavaScript 中过滤数组。…...
)
随机森林(Random Forest)
随机森林(Random Forest)是一种集成学习方法,通过组合多个决策树来提高模型的性能和鲁棒性。随机森林在每个决策树的训练过程中引入了随机性,包括对样本和特征的随机选择,以提高模型的泛化能力。以下是随机森林的基本原…...
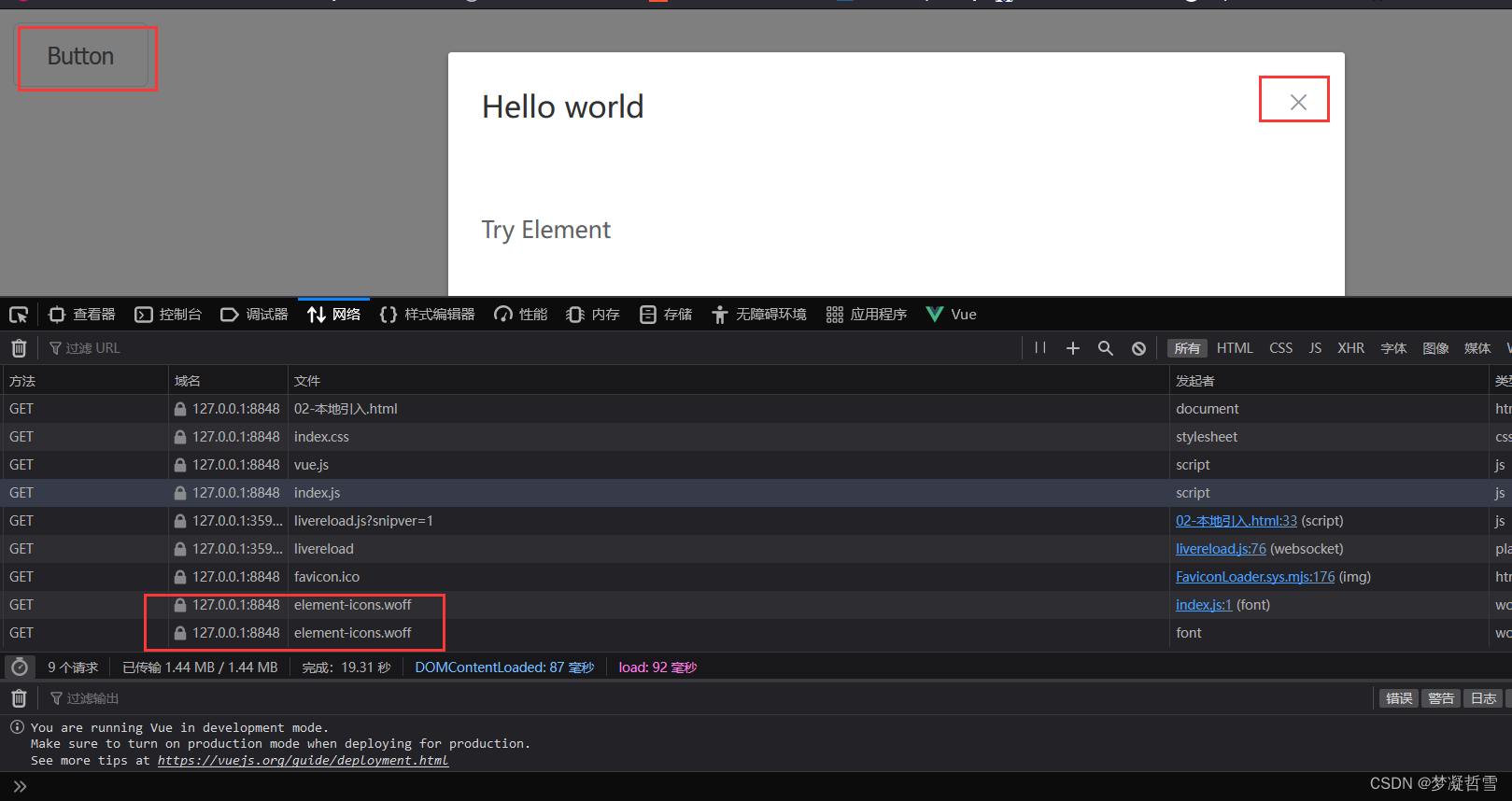
本地引入Element UI后导致图标显示异常
引入方式 npm 安装 推荐使用 npm 的方式安装,它能更好地和 webpack 打包工具配合使用。 npm i element-ui -SCDN 目前可以通过 unpkg.com/element-ui 获取到最新版本的资源,在页面上引入 js 和 css 文件即可开始使用。 <!-- 引入样式 --> <…...
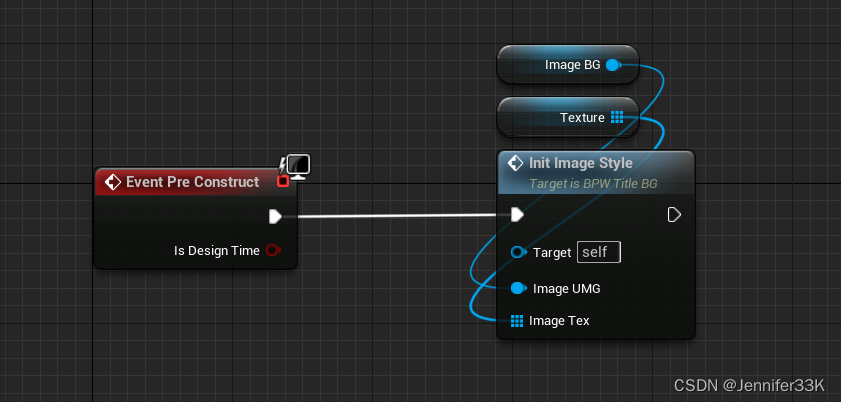
UE5.1_UMG序列帧动画制作
UE5.1_UMG序列帧动画制作 UMG序列帧动画制作相对比较简单,不像视频帧需要创建媒体播放器那么复杂,以下简要说明: 1. 事件函数 2. 准备序列帧装入数组 3. 构造调用事件函数 4. 预览 序列帧UMG0105 5. 完成!按需配置即可。...

总结HarmonyOS的技术特点
HarmonyOS是华为自主研发的面向全场景的分布式操作系统。它的技术特点主要体现在以下几个方面: 分布式架构:HarmonyOS采用了分布式架构设计,通过组件化和小型化等方法,支持多种终端设备按需弹性部署,能够适配不同类别的…...

从0到1入门C++编程——04 类和对象之封装、构造函数、析构函数、this指针、友元
文章目录 一、封装二、项目文件拆分三、构造函数和析构函数1.构造函数的分类及调用2.拷贝函数调用时机3.构造函数调用规则4.深拷贝与浅拷贝5.初始化列表6.类对象作为类成员7.静态成员 四、C对象模型和this指针1.类的对象大小计算2.this指针3.空指针访问成员函数4.const修饰成员…...

Robot Operating System 2: Design, Architecture, and Uses In The Wild
Robot Operating System 2: Design, Architecture, and Uses In The Wild (机器人操作系统 2:设计、架构和实际应用) 摘要:随着机器人在广泛的商业用例中的部署,机器人革命的下一章正在顺利进行。即使在无数的应用程序和环境中,也…...

TinyEngine 服务端正式开源啦!!!
背景介绍 TinyEngine 低代码引擎介绍 随着企业对于低代码开发平台的需求日益增长,急需一个通用的解决方案来满足各种低代码平台的开发需求。正是在这种情况下,低代码引擎应运而生。它是一种通用的开发框架,通过对低代码平台系统常用的功能进…...

网页设计与制作web前端设计html+css+js成品。电脑网站制作代开发。vscodeDrea 【企业公司宣传网站(HTML静态网页项目实战)附源码】
网页设计与制作web前端设计htmlcssjs成品。电脑网站制作代开发。vscodeDrea 【企业公司宣传网站(HTML静态网页项目实战)附源码】 https://www.bilibili.com/video/BV1Hp4y1o7RY/?share_sourcecopy_web&vd_sourced43766e8ddfffd1f1a1165a3e72d7605...
Avalonia学习(二十)-登录界面演示
今天开始继续Avalonia练习。 本节:演示实现登录界面 在网上看见一个博客,展示Avalonia实现,仿照GGTalk,我实现了一下,感觉是可以的。将测试的数据代码效果写下来。主要是样式使用,图片加载方式。 只有前…...

Spring依赖注入的魔法:深入DI的实现原理【beans 五】
欢迎来到我的博客,代码的世界里,每一行都是一个故事 Spring依赖注入的魔法:深入DI的实现原理【beans 五】 前言DI的基本概念基本概念:为什么使用依赖注入: 构造器注入构造器注入的基本概念:示例:…...
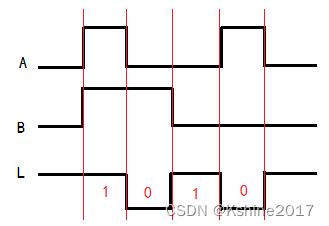
【学习笔记】1、数字逻辑概论
1.1 数字信号 数字信号,在时间和数值上均是离散的。数字信号的表达方式:二值数字逻辑和逻辑电平描述的数字波形。 (1) 数字波形的两种类型 数值信号又称为“二值信号”。数字波形又称为“二值位形图”。 什么是一拍 一定的时…...

设置代理IP地址对网络有什么影响?爬虫代理IP主要有哪些作用?
在互联网的广泛应用下,代理IP地址成为了一种常见的网络技术。代理IP地址可以改变用户的上网行为,进而影响网络访问的速度和安全性。本篇文章将探讨设置代理IP地址对网络的影响,以及爬虫代理IP的主要作用。 首先,让我们来了解一下代…...

聊聊jvm的mapped buffer的统计
序 本文主要研究一下jvm的mapped buffer的统计 示例 private void writeDirectBuffer() {// 分配一个256MB的直接缓冲区ByteBuffer buffer ByteBuffer.allocateDirect(256 * 1024 * 1024);// 填充数据Random random new Random();while (buffer.remaining() > 4) {buff…...

matrix-breakout-2-morpheus 靶场 练习思路
arp-scan -l 获取目标机器的IP nmap -sV -A IP 查看目标机器开放的端口 gobuster dir -u http://192.168.29.130 -x php,txt,jsp,asp -w /usr/share/wordlists/dirbuster/directory-list-2.3-medium.txt 爆破目标机器的文件目录,找到可以访问的文件路径 http://192.168…...

【Flutter 开发实战】Dart 基础篇:从了解背景开始
想要学会用 Flutter 开发 App,就不可避免的要学习另一门很有意思的编程语言 —— Dart。很多小伙伴可能在学习 Flutter 之前可能都没听说过这门编程语言,我也是一样,还以为 Dart 是为了 Flutter 而诞生的;然而,当我们去…...
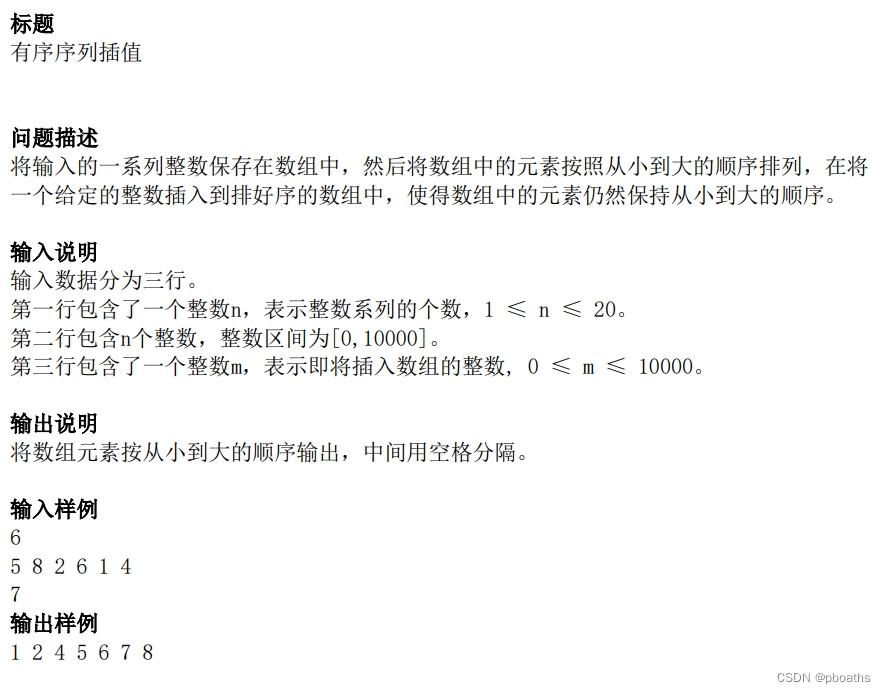
西电期末1017.有序序列插值
一.题目 二.分析与思路 简单题。主要考察简单的排序,最后的插入数据同样不用具体实现,只需在输出时多输出一下即可,注意顺序!! 三.代码实现 #include<bits/stdc.h>//万能头 int main() {int n;scanf("%d…...
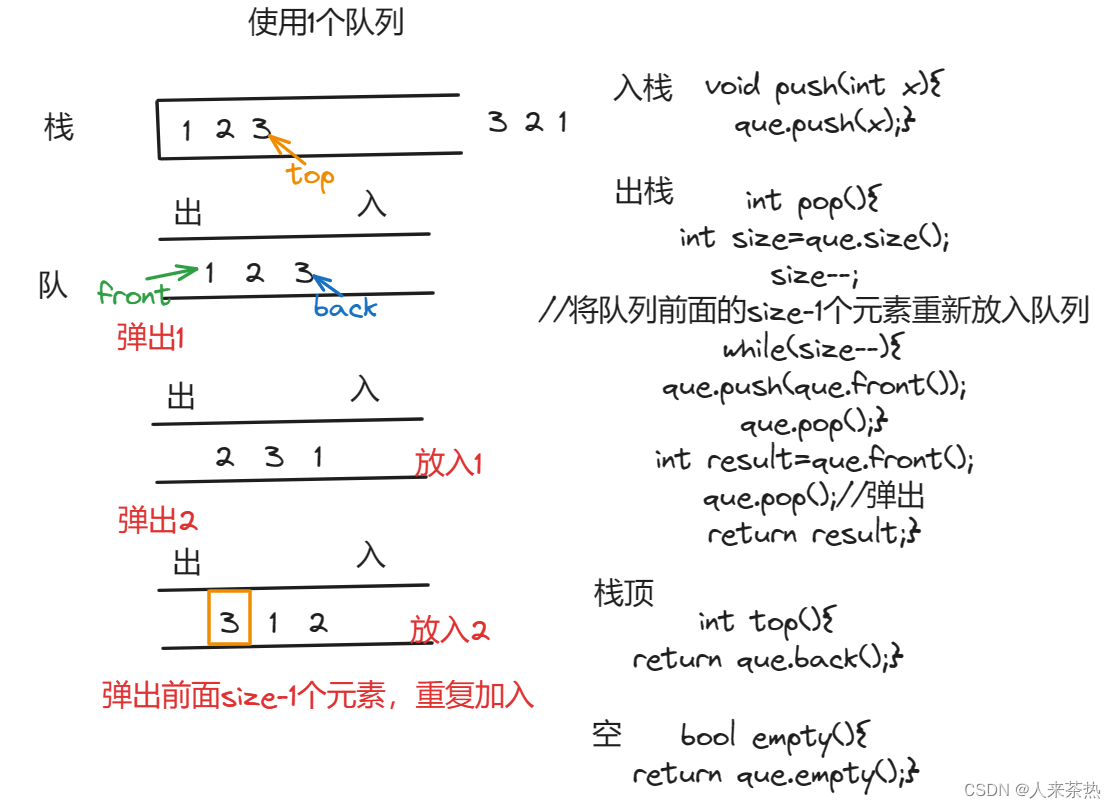
day10 用栈实现队列 用队列实现栈
题目1:232 用栈实现队列 题目链接:232 用栈实现队列 题意 用两个栈实现先入先出队列(一个入栈,一个出栈),实现如下功能: 1)push:将元素x推到队列末尾 2)…...

嵌入式与硬件设计前沿:IIoT、FIDO、TSN与GaN无线充电实战解析
1. 项目概述:一场面向硬件工程师的在线技术盛宴如果你是一名嵌入式系统开发者、汽车电子工程师,或者正在为你的智能硬件产品寻找无线充电方案,那么最近一段时间密集出现的线上技术研讨会,绝对值得你花时间关注。这不是泛泛而谈的理…...

别再被Excel文件‘炸’了!手把手教你用ZipSecureFile.setMinInflateRatio解决Apache POI的Zip Bomb报错
深度解析Apache POI的Zip Bomb防护机制与安全实践 当Java开发者使用Apache POI处理用户上传的Excel文件时,可能会突然遭遇"Zip bomb detected!"的报错。这个看似简单的错误背后,实际上涉及文件安全检测、内存防护和系统稳定性等多重考量。本文…...

基于Rust构建命令行任务监控与通知工具:openclaw-tui-notify实践
1. 项目概述与核心价值最近在折腾一个后台数据处理脚本,它经常一跑就是好几个小时。问题来了,我总不能一直盯着终端看它什么时候结束吧?有时候去开个会、吃个饭,回来发现脚本早就跑完了,白白浪费了时间等结果。更头疼的…...

如何在英雄联盟中节省70%的准备时间?这个本地工具告诉你答案
如何在英雄联盟中节省70%的准备时间?这个本地工具告诉你答案 【免费下载链接】League-Toolkit An all-in-one toolkit for LeagueClient. Gathering power 🚀. 项目地址: https://gitcode.com/gh_mirrors/le/League-Toolkit 想象一下这个场景&…...

2026最权威的五大降AI率网站横评
Ai论文网站排名(开题报告、文献综述、降aigc率、降重综合对比) TOP1. 千笔AI TOP2. aipasspaper TOP3. 清北论文 TOP4. 豆包 TOP5. kimi TOP6. deepseek 于当下学术研究的语境里,AI论文工具有着强大功能,可全面涵盖文献梳理…...

从A*到平滑:拉绳算法如何为游戏角色“剪裁”最优路径
1. 游戏寻路为什么需要平滑处理? 想象一下你在玩一款开放世界游戏,控制角色从城堡出发前往远处的森林。如果直接使用A*算法生成的路径,角色可能会像喝醉酒一样左右摇摆,贴着导航网格的边缘移动。这种"锯齿状路径"不仅看…...

VR文旅大空间|沉浸式体验重塑文旅新场景
随着文旅产业不断升级,传统“走马观花式”的旅游体验已经难以满足游客日益增长的体验需求。如何让游客“留下来、玩得久、愿意分享”,成为各地文旅项目共同思考的问题。在这一背景下,VR大空间文旅逐渐走入大众视野,成为文旅融合发…...

闲置烽火HG680L变身全能播放器:S905L-3B芯片刷机后安装EmuELEC游戏系统+CoreELEC影音库
闲置烽火HG680L改造指南:打造全能家庭娱乐终端 家里角落积灰的烽火HG680L机顶盒,其实是一块被低估的硬件宝藏。搭载Amlogic S905L-3B芯片的它,性能远超普通电视盒子。通过巧妙改造,不仅能流畅运行复古游戏系统,还能变身…...

认知神经科学研究报告【20260062】
ForeSight 5.88.2 算术推理能力报告 主题:从个位数原子规则到多位数加减法的L4+自主涌现一、系统拥有的先验知识 系统仅被赋予 390 条个位数四则运算的原子事实(如 358、7963、1-7-6),这些是最底…...

3步解锁百度网盘Mac版高速下载:逆向工程实践指南
3步解锁百度网盘Mac版高速下载:逆向工程实践指南 【免费下载链接】BaiduNetdiskPlugin-macOS For macOS.百度网盘 破解SVIP、下载速度限制~ 项目地址: https://gitcode.com/gh_mirrors/ba/BaiduNetdiskPlugin-macOS 还在为百度网盘在macOS平台上的下载速度限…...