平衡搜索二叉树(AVL树)
目录
前言
一、AVL树的概念
二、AVL树的定义
三、AVL树的插入
四、AVL树的旋转
4.1、右单旋
4.2、左单旋
4.3、左右双旋
4.4、右左双旋
五、AVL树的验证
5.1、 验证其为二叉搜索树
5.2、 验证其为平衡树
六、AVL树的性能
前言
二叉搜索树虽可以缩短查找的效率,但如果数据有序或接近有序二叉搜索树将退化为单支树,查 找元素相当于在顺序表中搜索元素,效率低下。因此,两位俄罗斯的数学家G.M.Adelson-Velskii 和E.M.Landis在1962年发明了一种解决上述问题的方法:当向二叉搜索树中插入新结点后,如果能保证每个结点的左右 子树高度之差的绝对值不超过1(需要对树中的结点进行调整),即可降低树的高度,从而减少平均 搜索长度。
一、AVL树的概念
二、AVL树的定义
AVL树节点的定义:
我们这里直接实现KV模型的AVL树,为了方便后续的操作,这里将AVL树中的结点定义为三叉链结构,并在每个结点当中引入平衡因子(右子树高度-左子树高度)。除此之外,还需编写一个构造新结点的构造函数,由于新构造结点的左右子树均为空树,于是将新构造结点的平衡因子初始设置为0即可。
template<class K, class V>
class AVLTreeNode
{AVLTreeNode<K, V>* _left;AVLTreeNode<K, V>* _right;AVLTreeNode<K, V>* _parent;pair<K, V> _kv;int _bf; // 平衡因子AVLTreeNode(const pair<K, V>& kv):_left(nullptr), _right(nullptr), _parent(nullptr), _kv(kv), _bf(0){}
};三、AVL树的插入
- 按照二叉搜索树的插入方法,找到待插入位置。
- 找到待插入位置后,将待插入结点插入到树中。
- 更新平衡因子,如果出现不平衡,则需要进行旋转。
- 待插入结点的key值比当前结点小就插入到该结点的左子树。
- 待插入结点的key值比当前结点大就插入到该结点的右子树。
- 待插入结点的key值与当前结点的key值相等就插入失败。
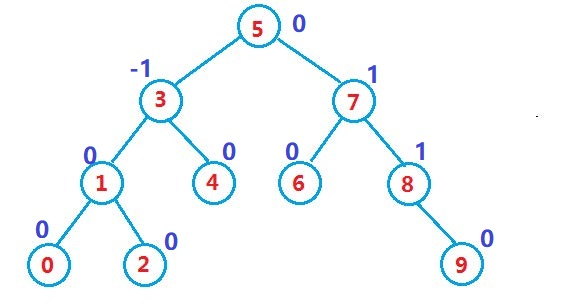
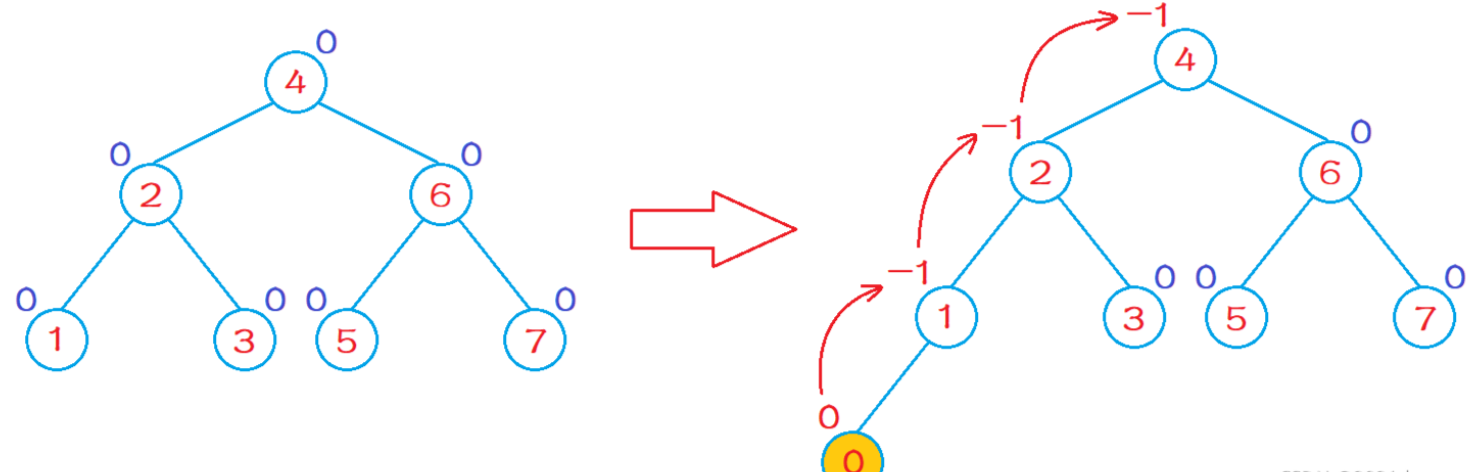
而在最坏情况下,我们更新平衡因子时会一路更新到根结点。例如下面这种情况:pCur 插入后, pParent 的平衡因子一定需要调整,在插入之前, pParent 的平衡因子分为三种情况:-1 , 0, 1, 分以下两种情况:1. 如果 pCur 插入到 pParent 的左侧,只需给 pParent 的平衡因子 -1 即可2. 如果 pCur 插入到 pParent 的右侧,只需给 pParent 的平衡因子 +1 即可此时: pParent 的平衡因子可能有三种情况: 0 ,正负 1 , 正负 21. 如果 pParent 的平衡因子为 0 ,说明插入之前 pParent 的平衡因子为正负 1 ,插入后被调整成0 ,此时满足AVL 树的性质,插入成功2. 如果 pParent 的平衡因子为正负 1 ,说明插入前 pParent 的平衡因子一定为 0 ,插入后被更 新成正负1 ,此 时以 pParent 为根的树的高度增加,需要继续向上更新3. 如果 pParent 的平衡因子为正负 2 ,则 pParent 的平衡因子违反平衡树的性质,需要对其进 行旋转处理
cur = parent;parent = parent->_parent;
理由如下:
若cur的平衡因子是0,那么cur一定是新增结点,而不是上一次更新平衡因子时的parent,否则在上一次更新平衡因子时,会因为parent的平衡因子为0而停止继续往上更新。
而cur是新增结点的话,其父结点的平衡因子更新后一定是-1/0/1,而不可能是-2/2,因为新增结点最终会插入到一个空树当中,在新增结点插入前,其父结点的状态有以下两种可能:
其父结点是一个左右子树均为空的叶子结点,其平
衡因子是0,新增结点插入后其平衡因子更新为-1/1。
其父结点是一个左子树或右子树为空的结点,其平衡因子是-1/1,新增结点插入到其父结点的空子树当中,使得其父结点左右子树当中较矮的一棵子树增高了,新增结点后其平衡因子更新为0。
综上所述,当parent的平衡因子为-2/2时,cur的平衡因子必定是-1/1而不会是0
根据此结论,我们可以将旋转处理分为以下四类:
- 当parent的平衡因子为-2,cur的平衡因子为-1时,进行右单旋。
- 当parent的平衡因子为-2,cur的平衡因子为1时,进行左右双旋。
- 当parent的平衡因子为2,cur的平衡因子为-1时,进行右左双旋。
- 当parent的平衡因子为2,cur的平衡因子为1时,进行左单旋。
//插入函数
bool Insert(const pair<K, V>& kv)
{if (_root == nullptr) //若AVL树为空树,则插入结点直接作为根结点{_root = new Node(kv);return true;}//1、按照二叉搜索树的插入方法,找到待插入位置Node* cur = _root;Node* parent = nullptr;while (cur){if (kv.first < cur->_kv.first) //待插入结点的key值小于当前结点的key值{//往该结点的左子树走parent = cur;cur = cur->_left;}else if (kv.first > cur->_kv.first) //待插入结点的key值大于当前结点的key值{//往该结点的右子树走parent = cur;cur = cur->_right;}else //待插入结点的key值等于当前结点的key值{//插入失败(不允许key值冗余)return false;}}//2、将待插入结点插入到树中cur = new Node(kv); //根据所给值构造一个新结点if (kv.first < parent->_kv.first) //新结点的key值小于parent的key值{//插入到parent的左边parent->_left = cur;cur->_parent = parent;}else //新结点的key值大于parent的key值{//插入到parent的右边parent->_right = cur;cur->_parent = parent;}//3、更新平衡因子,如果出现不平衡,则需要进行旋转while (cur != _root) //最坏一路更新到根结点{if (cur == parent->_left) //parent的左子树增高{parent->_bf--; //parent的平衡因子--}else if (cur == parent->_right) //parent的右子树增高{parent->_bf++; //parent的平衡因子++}//判断是否更新结束或需要进行旋转if (parent->_bf == 0) //更新结束(新增结点把parent左右子树矮的那一边增高了,此时左右高度一致){break; //parent树的高度没有发生变化,不会影响其父结点及以上结点的平衡因子}else if (parent->_bf == -1 || parent->_bf == 1) //需要继续往上更新平衡因子{//parent树的高度变化,会影响其父结点的平衡因子,需要继续往上更新平衡因子cur = parent;parent = parent->_parent;}else if (parent->_bf == -2 || parent->_bf == 2) //需要进行旋转(此时parent树已经不平衡了){if (parent->_bf == -2){if (cur->_bf == -1){RotateR(parent); //右单旋}else //cur->_bf == 1{RotateLR(parent); //左右双旋}}else //parent->_bf == 2{if (cur->_bf == -1){RotateRL(parent); //右左双旋}else //cur->_bf == 1{RotateL(parent); //左单旋}}break; //旋转后就一定平衡了,无需继续往上更新平衡因子(旋转后树高度变为插入之前了)}else{assert(false); //在插入前树的平衡因子就有问题}}return true; //插入成功
}
四、AVL树的旋转
4.1、右单旋
新节点插入较高左子树的左侧---左左:
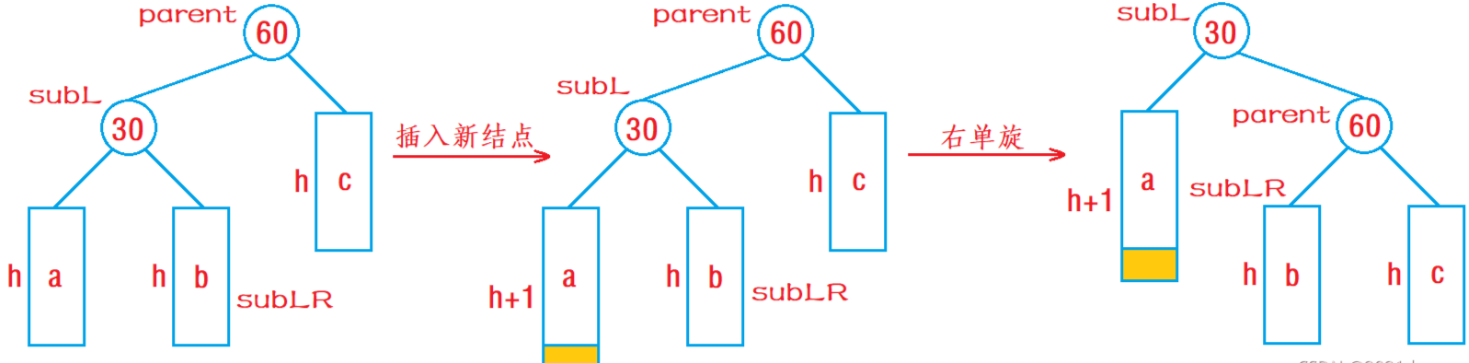
- 让subL的右子树作为parent的左子树。
- 让parent作为subL的右子树。
- 让subL作为整个子树的根。
- 更新平衡因子。
右单旋后满足二叉搜索树的性质:
- subL的右子树当中结点的值本身就比parent的值小,因此可以作为parent的左子树。
- parent及其右子树当中结点的值本身就比subL的值大,因此可以作为subL的右子树。
void RotateR(Node* parent)
{Node* subL = parent->_left;Node* subLR = subL->_right;parent->_left = subLR;if (subLR) //右孩子可能为空subLR->_parent = parent;Node* ppnode = parent->_parent; //记录父节点的父节点subL->_right = parent;parent->_parent = subL;if (ppnode == nullptr) //如果父节点是根节点{_root = subL; //改变根节点_root->_parent = nullptr;}else //如果父节点不是根节点{if (ppnode->_left == parent) //如果父节点是左孩子{ppnode->_left = subL; }else //如果父节点是右孩子{ppnode->_right = subL;}subL->_parent = ppnode;}parent->_bf = subL->_bf = 0; //最后更新平衡因子
}4.2、左单旋
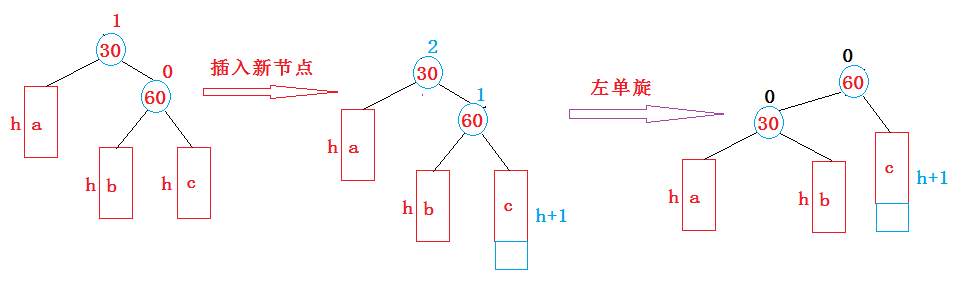
- 让subR的左子树作为parent的右子树。
- 让parent作为subR的左子树。
- 让subR作为整个子树的根。
- 更新平衡因子。
左单旋后满足二叉搜索树的性质:
- subR的左子树当中结点的值本身就比parent的值大,因此可以作为parent的右子树。
- parent及其左子树当中结点的值本身就比subR的值小,因此可以作为subR的左子树。
//左单旋
void RotateL(Node* parent)
{Node* subR = parent->_right;Node* subRL = subR->_left;Node* parentParent = parent->_parent;//1、建立subR和parent之间的关系parent->_parent = subR;subR->_left = parent;//2、建立parent和subRL之间的关系parent->_right = subRL;if (subRL)subRL->_parent = parent;//3、建立parentParent和subR之间的关系if (parentParent == nullptr){_root = subR;subR->_parent = nullptr; //subR的_parent指向需改变}else{if (parent == parentParent->_left){parentParent->_left = subR;}else //parent == parentParent->_right{parentParent->_right = subR;}subR->_parent = parentParent;}//4、更新平衡因子subR->_bf = parent->_bf = 0;
}
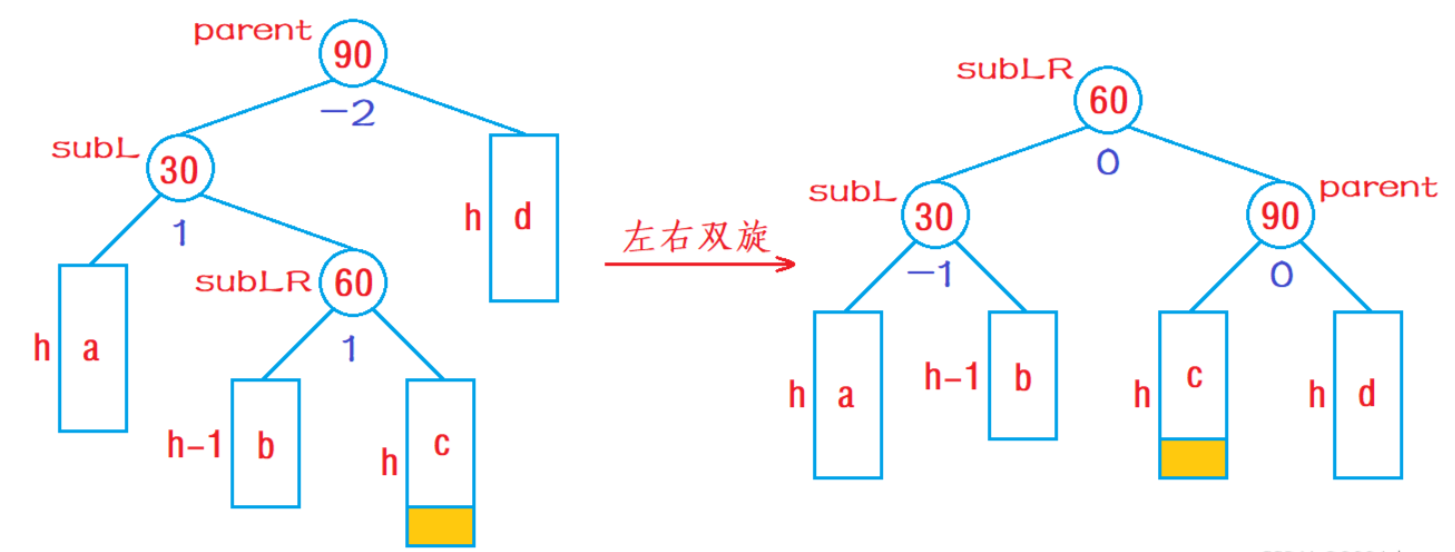
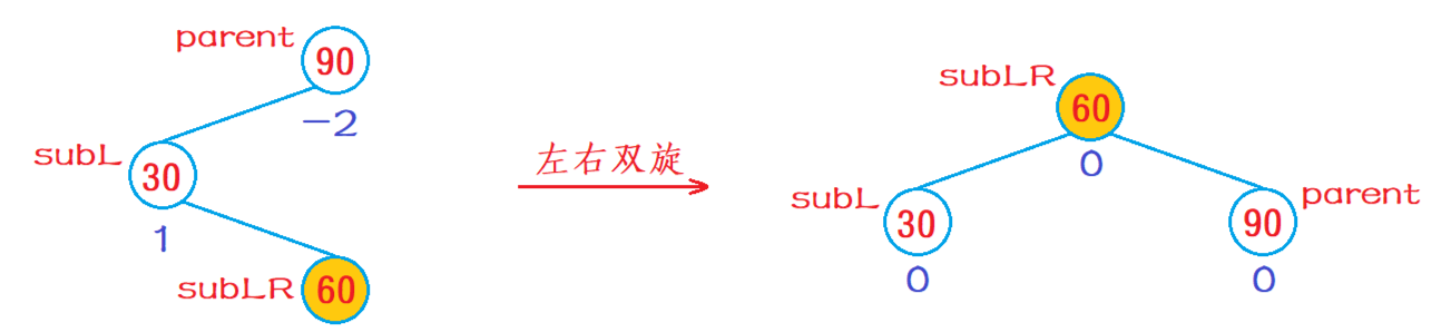
4.3、左右双旋
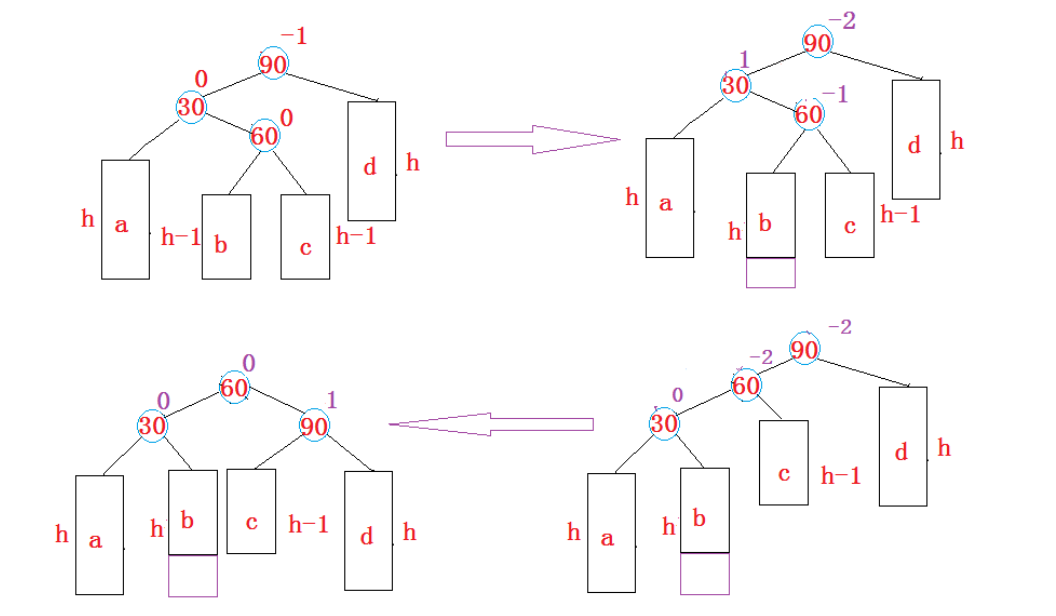
- 以subL为旋转点进行左单旋。
- 以parent为旋转点进行右单旋。
- 更新平衡因子。
左右双旋后满足二叉搜索树的性质:
左右双旋后,实际上就是让subLR的左子树和右子树,分别作为subL和parent的右子树和左子树,再让subL和parent分别作为subLR的左右子树,最后让subLR作为整个子树的根
1、subLR的左子树当中的结点本身就比subL的值大,因此可以作为subL的右子树。
2、subLR的右子树当中的结点本身就比parent的值小,因此可以作为parent的左子树。
3、经过步骤1/2后,subL及其子树当中结点的值都就比subLR的值小,而parent及其子树当中结点的值都就比subLR的值大,因此它们可以分别作为subLR的左右子树
左右双旋后,平衡因子的更新随着subLR原始平衡因子的不同分为以下三种情况:
1、当subLR原始平衡因子是-1时,左右双旋后parent、subL、subLR的平衡因子分别更新为1、0、0。

//左右双旋
void RotateLR(Node* parent)
{Node* subL = parent->_left;Node* subLR = subL->_right;int bf = subLR->_bf; //subLR不可能为nullptr,因为subL的平衡因子是1//1、以subL为旋转点进行左单旋RotateL(subL);//2、以parent为旋转点进行右单旋RotateR(parent);//3、更新平衡因子if (bf == 1){subLR->_bf = 0;subL->_bf = -1;parent->_bf = 0;}else if (bf == -1){subLR->_bf = 0;subL->_bf = 0;parent->_bf = 1;}else if (bf == 0){subLR->_bf = 0;subL->_bf = 0;parent->_bf = 0;}else{assert(false); //在旋转前树的平衡因子就有问题}
}
4.4、右左双旋
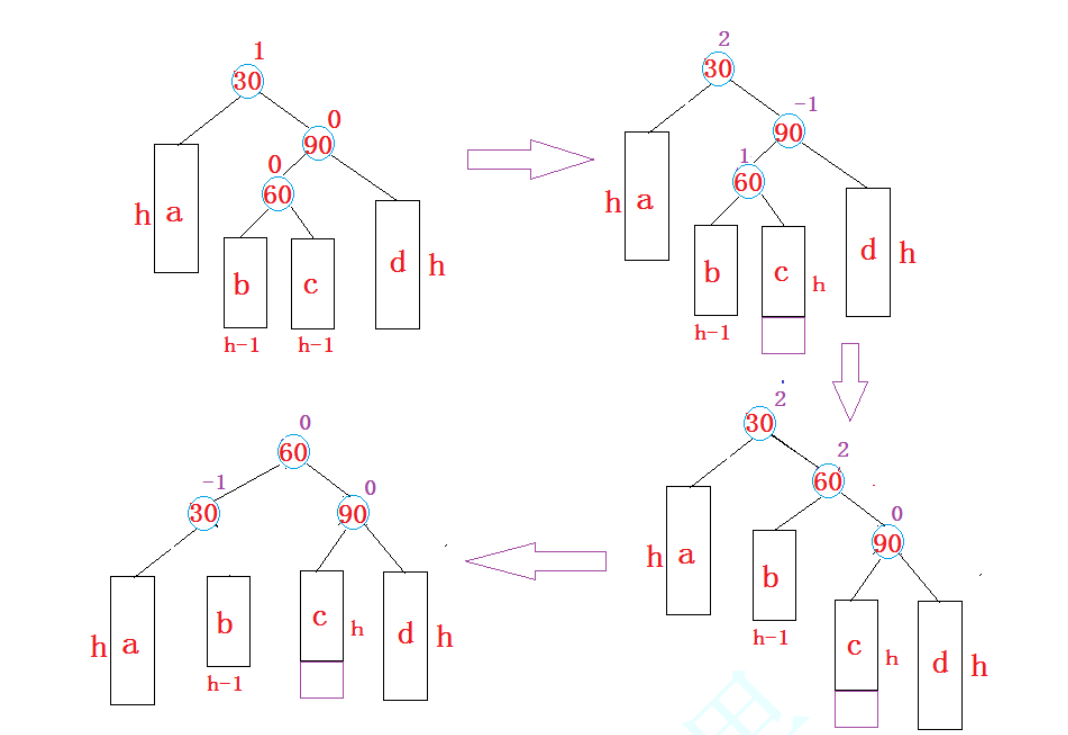
- 以subR为旋转点进行右单旋。
- 以parent为旋转点进行左单旋。
- 更新平衡因子。
右左双旋后,实际上就是让subRL的左子树和右子树,分别作为parent和subR的右子树和左子树,再让parent和subR分别作为subRL的左右子树,最后让subRL作为整个子树的根
1、subRL的左子树当中的结点本身就比parent的值大,因此可以作为parent的右子树。
2、subRL的右子树当中的结点本身就比subR的值小,因此可以作为subR的左子树
3、经过步骤1/2后,parent及其子树当中结点的值都就比subRL的值小,而subR及其子树当中结点的值都就比subRL的值大,因此它们可以分别作为subRL的左右子树
右左双旋后,平衡因子的更新随着subLR原始平衡因子的不同分为以下三种情况:和左右双旋情况一样,这里就不过多分析。
右左双旋代码:
//右左双旋
void RotateRL(Node* parent)
{Node* subR = parent->_right;Node* subRL = subR->_left;int bf = subRL->_bf;//1、以subR为轴进行右单旋RotateR(subR);//2、以parent为轴进行左单旋RotateL(parent);//3、更新平衡因子if (bf == 1){subRL->_bf = 0;parent->_bf = -1;subR->_bf = 0;}else if (bf == -1){subRL->_bf = 0;parent->_bf = 0;subR->_bf = 1;}else if (bf == 0){subRL->_bf = 0;parent->_bf = 0;subR->_bf = 0;}else{assert(false); //在旋转前树的平衡因子就有问题}
}
五、AVL树的验证
5.1、 验证其为二叉搜索树
//中序遍历
void Inorder()
{_Inorder(_root);
}
//中序遍历子函数
void _Inorder(Node* root)
{if (root == nullptr)return;_Inorder(root->_left);cout << root->_kv.first << " ";_Inorder(root->_right);
}5.2、 验证其为平衡树
//判断是否为AVL树
bool IsAVLTree()
{int hight = 0; //输出型参数return _IsBalanced(_root, hight);
}
//检测二叉树是否平衡
bool _IsBalanced(Node* root, int& hight)
{if (root == nullptr) //空树是平衡二叉树{hight = 0; //空树的高度为0return true;}//先判断左子树int leftHight = 0;if (_IsBalanced(root->_left, leftHight) == false)return false;//再判断右子树int rightHight = 0;if (_IsBalanced(root->_right, rightHight) == false)return false;//检查该结点的平衡因子if (rightHight - leftHight != root->_bf){cout << "平衡因子设置异常:" << root->_kv.first << endl;}//把左右子树的高度中的较大值+1作为当前树的高度返回给上一层hight = max(leftHight, rightHight) + 1;return abs(rightHight - leftHight) < 2; //平衡二叉树的条件
}
六、AVL树的性能
-
平衡性:AVL树保持了一种平衡性,对于任意节点,其左子树和右子树的高度差不超过1。这种平衡性保证了在最坏情况下,AVL树的插入、删除和查找操作的时间复杂度都是O(log n)。
-
插入和删除效率:由于AVL树的平衡性,插入和删除操作可能会导致树进行旋转操作,使得树重新达到平衡状态。虽然旋转操作会增加一定的开销,但是由于树的平衡性,插入和删除操作的时间复杂度仍然是O(log n)。
-
查找效率:由于AVL树是一种二叉搜索树,查找操作的时间复杂度也是O(log n)。这使得AVL树非常适合需要高效的查找操作的场景。
-
尽管AVL树具有良好的平衡性和较高的查找效率,但是由于需要维护平衡性,插入和删除操作的性能可能会受到一定的影响。在一些特定的插入、删除操作频繁的场景下,可能会考虑使用其他平衡树结构(如红黑树)来获得更好的性能表现。
相关文章:
平衡搜索二叉树(AVL树)
目录 前言 一、AVL树的概念 二、AVL树的定义 三、AVL树的插入 四、AVL树的旋转 4.1、右单旋 4.2、左单旋 4.3、左右双旋 4.4、右左双旋 五、AVL树的验证 5.1、 验证其为二叉搜索树 5.2、 验证其为平衡树 六、AVL树的性能 前言 二叉搜索树虽可以缩短查找的效率&…...

2024年1月12日学习总结
学习目标 完成集中学习的readme 完成联邦学习的代码编写 边学习边总结 学习内容 Introduction to Early Stopping 1、Overfitting 过拟合是所有机器学习,深度学习中可能出现的一个比较严重的问题。具体表现就是:你的模型在训练集上处理的效果非常好&…...

PCL 使用克拉默法则进行四点定球(C++详细过程版)
目录 一、算法原理二、代码实现三、计算结果本文由CSDN点云侠原创,PCL 使用克拉默法则进行四点定球(C++详细过程版),爬虫自重。如果你不是在点云侠的博客中看到该文章,那么此处便是不要脸的爬虫与GPT生成的文章。 一、算法原理 已知空间内不共面的四个点,设其坐标为 A (…...

前端导致浏览器奔溃原因分析
内存泄漏 内存泄漏(Memory Leak)是指程序中已动态分配的堆内存由于某种原因程序未释放或无法释放,造成系统内存的浪费,导致程序运行速度减慢甚至系统崩溃等严重后果。(程序某个未使用的变量或者方法,长期占…...
力扣:209.长度最小的子数组
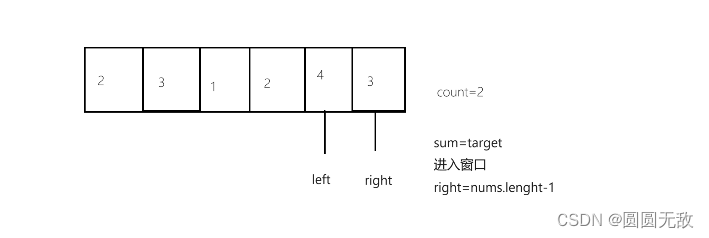
1.题目分析: 给定一个含有 n 个正整数的数组和一个正整数 target 。 找出该数组中满足其总和大于等于 target 的长度最小的 连续子数组 [numsl, numsl1, ..., numsr-1, numsr] ,并返回其长度。如果不存在符合条件的子数组,返回 0 。 示例 …...

常见类型的yaml文件如何编写?--kind: Service
基本说明 在 Kubernetes 中,Service 是一种抽象的方式,用于定义一组 Pod 的访问方式和网络服务。Service 提供了一个稳定的网络端点(Endpoint),使得其他服务或外部用户可以通过 Service 来访问被管理的 Pod。 负载均…...

linux环境下安装postgresql
PostgreSQL: Linux downloads (Red Hat family)postgresql官网 PostgreSQL: Linux downloads (Red Hat family) 环境: centos7 postgresql14 选择版本 执行启动命令 配置远程连接文件 vi /var/lib/pqsql/14/data/postgresql.conf 这里将listen_addresses值由lo…...
专业课145+合肥工业大学833信号分析与处理考研经验合工大电子信息通信
今年专业课145也是考研科目中最满意的一门,其他基本相对平平,所以这里我总结一下自己的专业课合肥工业大学833信号分析与处理的复习经验。 我所用的教材是郑君里的《信号与系统》(第三版)和高西全、丁玉美的《数字信号处理》&…...
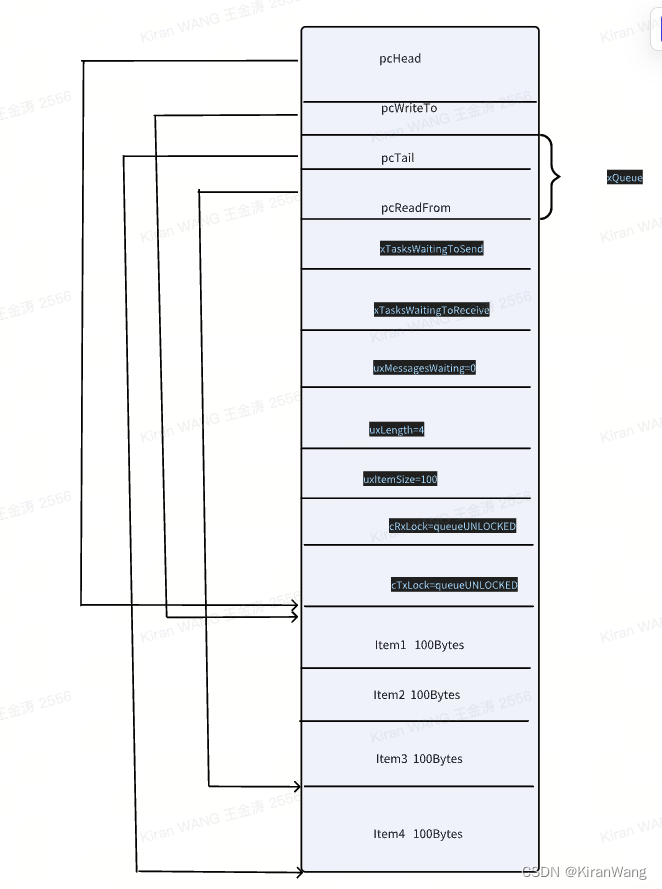
FreeRtos Queue (一)
本篇主要讲队列的数据结构和初始化 一、队列的数据结构 二、队列初始化完是什么样子的 队列初始化的函数调用关系:xQueueGenericCreate->prvInitialiseNewQueue->xQueueGenericReset 所以,最终初始化完的队列是这样的 假设申请了4个消息体&…...
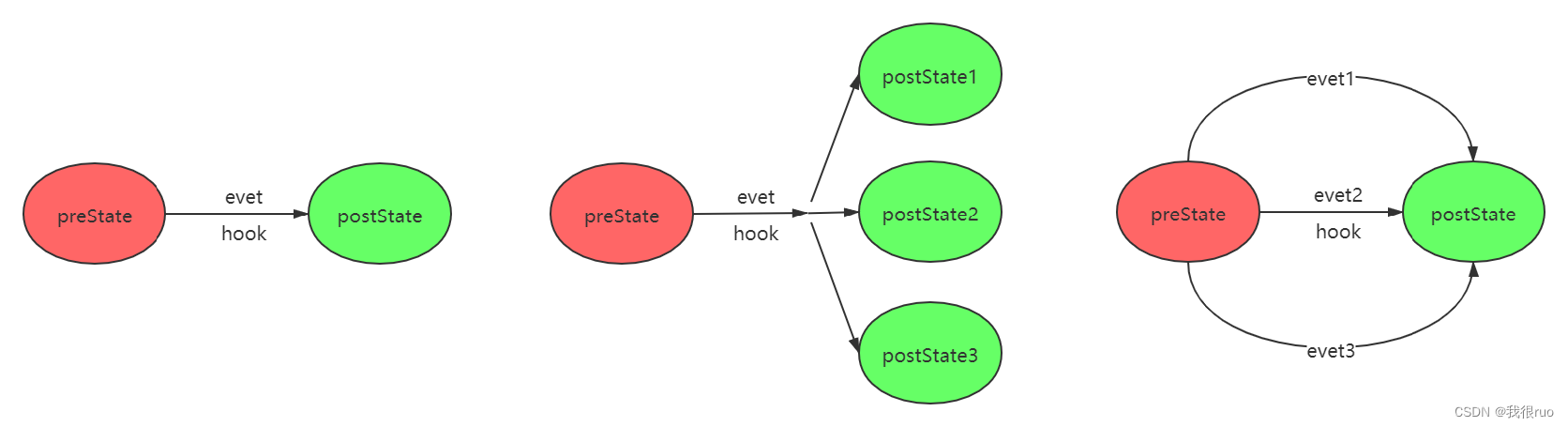
深入理解 Hadoop (五)YARN核心工作机制浅析
概述 YARN 的核心设计理念是 服务化(Service) 和 事件驱动(Event EventHandler)。服务化 和 事件驱动 软件设计思想的引入,使得 YARN 具有低耦合、高内聚的特点,各个模块只需完成各自功能,而模…...

优化 - 重构一次Mysql导致服务器的OOM
概述 优化了一次前后端处理不当导致的CPU的一次爆机行为,当然,这和服务器的配置低也有着密不可分的关系,简单的逻辑学告诉我们,要找到真正的问题,进行解决,CPU爆机的关键点在于前后端两个方面,…...

【光波电子学】基于MATLAB的多模光纤模场分布的仿真分析
基于MATLAB的多模光纤模场分布的仿真分析 一、引言 (1)多模光纤的概念 多模光纤(MMF)是一种具有较大纤芯直径的光纤结构,其核心直径通常在10-50微米范围内。与单模光纤(SMF)相比,…...
0104 AJAX介绍
Ajax 的全称是 Asynchronous Javascript And XML (异步 JavaScript 和 XML )。 通俗的理解:在网页中利用 XMLHttpRequest 对象和服务器进行数据交互的方式,就是 Ajax Ajax 能让我们轻松实现网页与服务器之间的数据交互。 浏览器…...
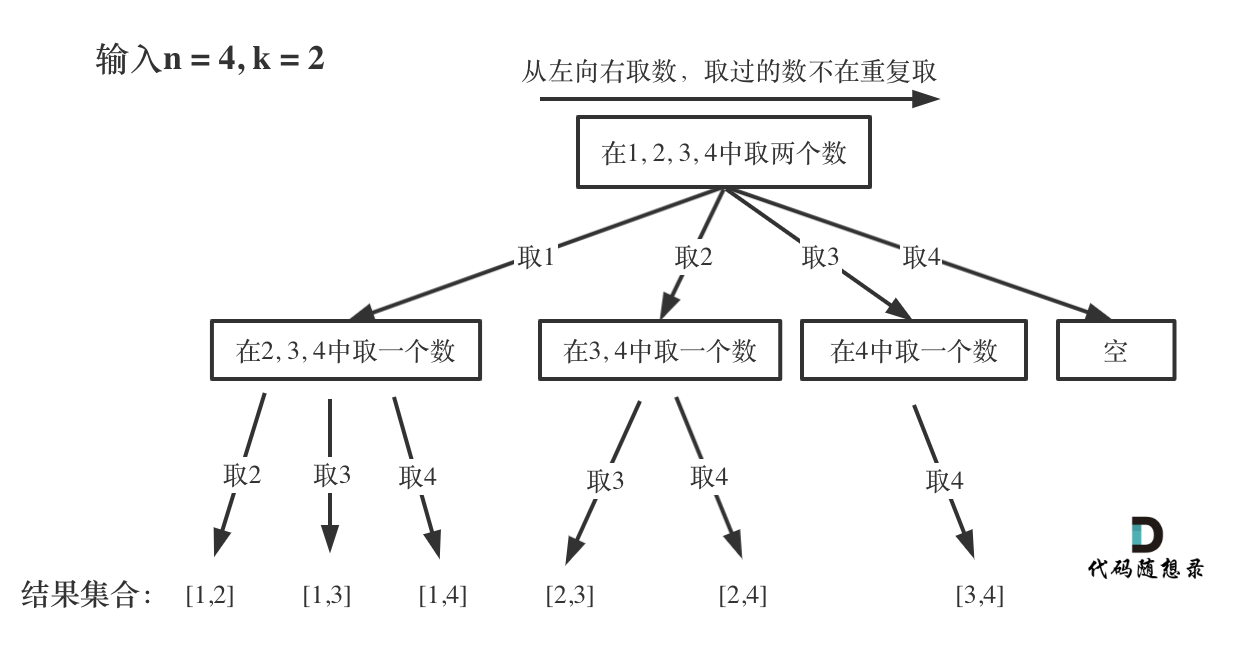
代码随想录算法训练营第24天 | 理论基础 77. 组合
目录 理论基础 什么是回溯法 回溯法的效率 回溯法解决的问题 如何理解回溯法 回溯法模板 77. 组合 💡解题思路 💻实现代码 理论基础 什么是回溯法 回溯法也可以叫做回溯搜索法,它是一种搜索的方式。 回溯法的效率 虽然回溯法很难ÿ…...

【深度学习环境搭建】Windows搭建Anaconda3、已经Pytorch的GPU版本
目录 搭建Anaconda3搭建GPU版本的Pytorch你的pip也要换源,推荐阿里源打开conda的PowerShell验证 搭建Anaconda3 无脑下载安装包安装(自行百度) 注意点: 1、用户目录下的.condarc需要配置(自定义环境的地址(…...

基于WebFlux的Websocket的实现,高级实现自定义功能拓展
基于WebFlux的Websocket 一、导入XML依赖 <dependency><groupId>org.springframework.boot</groupId><artifactId>spring-boot-starter-webflux</artifactId> </dependency><!-- 或者引入jackson --> <dependency><group…...

使用 LLVM clang C/C++ 编译器编译 OpenSSL 3.X库
1、下载 OpenSSL 3.X 库的源代码放到待编译目录 2、解压并接入 OpenSSL 3.X 库源码的根目录 3、复制 ./Configure 一个取名为 ./Configure-clang 4、修改 ./Configure-clang 找到配置段: CC CXX CPP LD 把它们改成 CC > "/usr/bin/clang-…...

【信息安全】hydra爆破工具的使用方法
hydra简介 hydra又名九头蛇,与burp常规的爆破模块不同,hydra爆破的范围更加广泛,可以爆破远程桌面连接,数据库这类的密码。他在kali系统中自带。 参数说明 -l 指定用户名 -L 指定用户名字典文件 -p 指定密码 -P 指…...

uniapp中uview组件库丰富的CountTo 数字滚动使用方法
目录 #平台差异说明 #基本使用 #设置滚动相关参数 #是否显示小数位 #千分位分隔符 #滚动执行的时机 #API #Props #Methods #Event 该组件一般用于需要滚动数字到某一个值的场景,目标要求是一个递增的值。 注意 如果给组件的父元素设置text-align: cente…...

inflate流程分析
一.inflate的三参数重载方法else里面逻辑 我们先看到setContentView里面的inflate的调用链: public View inflate(LayoutRes int resource, Nullable ViewGroup root) {return inflate(resource, root, root ! null);}public View inflate(LayoutRes int resource…...

【深度强化学习】DDPG算法在连续动作空间中的实战解析
1. DDPG算法初探:为什么我们需要它? 第一次接触DDPG(Deep Deterministic Policy Gradient)算法时,我完全被这个拗口的名字吓到了。但当我真正理解它的设计初衷后,才发现它其实解决了一个非常实际的问题——…...

低成本工业机器人:开源六轴机械臂从技术原理到生态落地全指南
低成本工业机器人:开源六轴机械臂从技术原理到生态落地全指南 【免费下载链接】Faze4-Robotic-arm All files for 6 axis robot arm with cycloidal gearboxes . 项目地址: https://gitcode.com/gh_mirrors/fa/Faze4-Robotic-arm 技术原理:打破工…...

百川2-13B-4bits模型微调指南:提升OpenClaw任务执行准确率
百川2-13B-4bits模型微调指南:提升OpenClaw任务执行准确率 1. 为什么需要微调百川模型? 去年夏天,当我第一次用OpenClaw自动化整理电脑上的数千份文档时,遇到了一个尴尬的问题——AI经常把技术文档和私人照片混在一起归类。这让…...

PX4仿真环境搭建全流程:解决roslaunch indoor1.launch报错及Gazebo崩溃问题
PX4仿真环境搭建全流程:从零构建到Gazebo调优实战 无人机仿真开发就像在数字世界里搭建一个飞行实验室,而PX4Gazebo的组合无疑是目前最接近真实飞行体验的虚拟试验场。但当你满怀期待地输入roslaunch indoor1.launch后,等待你的可能不是顺利起…...

UE5.3与Colosseum集成配置指南及常见问题解析
1. 环境准备:Windows系统下的基础配置 在开始Colosseum与UE5.3的集成之前,我们需要确保开发环境满足基本要求。我最近在Windows 11系统上完成了一次完整配置,实测下来这几个关键组件版本组合最稳定: 操作系统:Windows …...

【Polars 2.0数据清洗成本控制白皮书】:20年ETL专家亲授5大降本增效实战模式,92%企业忽略的内存泄漏陷阱
第一章:Polars 2.0数据清洗成本控制全景认知在现代数据工程实践中,数据清洗不再仅关乎逻辑正确性,更深度绑定计算资源消耗、内存占用与执行延迟。Polars 2.0 通过零拷贝语义、惰性执行引擎重构与 Arrow-native 内存布局优化,将清洗…...

EVA-01保姆级教程:Qwen2.5-VL-7B多模态大模型在EVA-01中的本地化安全部署
EVA-01保姆级教程:Qwen2.5-VL-7B多模态大模型在EVA-01中的本地化安全部署 1. 引言:欢迎来到NERV指挥中心 想象一下,你面前有一个能看懂图片、理解图表、甚至能和你讨论图片里发生了什么的智能助手。现在,我们把这个助手装进了一…...
,一个可以全方位监控ROS2系统内部节点工作状态的可视化超级终端!!!)
[具身智能-125]:RQT(Robot Qt),一个可以全方位监控ROS2系统内部节点工作状态的可视化超级终端!!!
如果说 RViz2 是机器人的“眼睛”(看 3D 世界),那么 RQT 就是机器人的“听诊器”和“控制台”。它基于 Qt 框架开发,采用插件化架构,让你能在一个窗口里完成对 ROS2 系统内部状态的全方位监控与调试。为了让你更好地利…...

【STM32F4系列】【HAL库】【实战解析】MPU6050 DMP姿态解算与I2C通信优化
1. MPU6050与DMP库基础解析 第一次接触MPU6050时,我被它小巧的体积和强大的功能震撼到了。这个售价不到10元的芯片,居然能同时测量三轴角加速度和三轴线加速度。在实际项目中,我发现直接读取原始数据并不难,但要想获得稳定的姿态信…...

CAD_Sketcher终极指南:如何在Blender中实现精准约束绘图
CAD_Sketcher终极指南:如何在Blender中实现精准约束绘图 【免费下载链接】CAD_Sketcher Constraint-based geometry sketcher for blender 项目地址: https://gitcode.com/gh_mirrors/ca/CAD_Sketcher 你是否曾在Blender中尝试绘制精确的机械零件或建筑平面图…...