rviz可视化机械臂(python)
一、准备的东西
一个机械臂的urdf
规划的路径点
二、launch文件的撰写
1.初始化
<?xml version="1.0" encoding="utf-8"?>
<launch><param name="robot_description" textfile="机械臂.urdf" /><node name="joint_state_publisher" pkg="joint_state_publisher" type="joint_state_publisher" /><node name="robot_state_publisher" pkg="robot_state_publisher" type="robot_state_publisher" /><node name="rviz" pkg="rviz" type="rviz" args="机械臂.rviz"required="true" /></launch>
2.加入自己路径点发布节点后的launch文件
(去除joint_state_publisher即可)
rqt_graph
<?xml version="1.0" encoding="utf-8"?>
<launch><param name="robot_description" textfile="机械臂.urdf" /><node name="robot_state_publisher" pkg="robot_state_publisher" type="robot_state_publisher" /><node name="rviz" pkg="rviz" type="rviz" args="机械臂.rviz"required="true" /></launch>
3.发布路径点话题
写一个节点,它需要发布类型为sensor_msgs / JointState的关节信息
发布了节点之后再打开rqt_grah
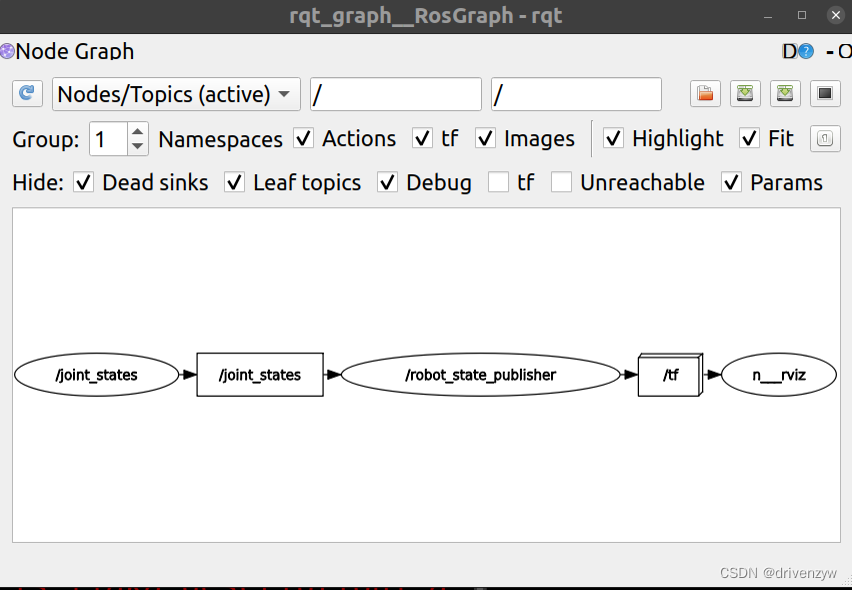
sensor_msgs/JointState Documentation
import rospy
import numpy as np
from geometry_msgs.msg import PoseStamped
from sensor_msgs.msg import JointStatedef tra_generate(joints):joints.position[0] += 0.1joints.velocity = []joints.effort = []return jointsdef Path_Publish(): # 初始化节点rospy.init_node("joint_states")# 创建一个发布者,发布数据类型为Pathpub = rospy.Publisher("joint_states", JointState, queue_size=10)# 设置发布频率rate = rospy.Rate(10)joints = JointState()joints.position = [0.1, 0.1, 0.1, 0.1, 0.1, 0.1]joints.name = ["joint_1", "joint_2", "joint_3", "joint_4", "joint_5", "joint_6"]while not rospy.is_shutdown():# 消息while True:msg = tra_generate(joints)msg.header.stamp = rospy.Time.now()# 发布消息rospy.loginfo("Publishing Plan...")pub.publish(msg)# 按照循环频率延时rate.sleep()if __name__ == "__main__":try:Path_Publish()except rospy.ROSInterruptException:pass
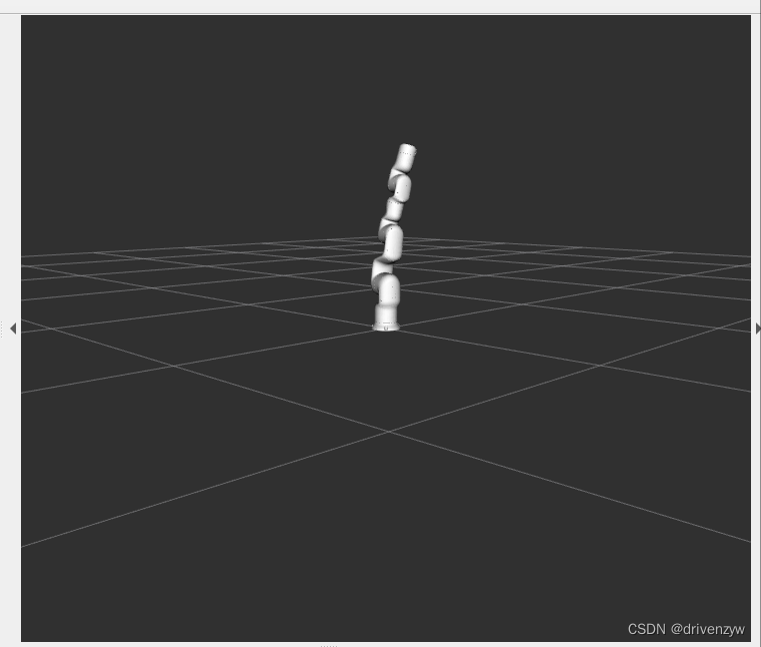
4.结果图
相关文章:
rviz可视化机械臂(python)
一、准备的东西 一个机械臂的urdf 规划的路径点 二、launch文件的撰写 1.初始化 <?xml version"1.0" encoding"utf-8"?> <launch><param name"robot_description" textfile"机械臂.urdf" /><node name&qu…...

《设计模式的艺术》笔记 - 享元模式
介绍 享元模式运用共享技术有效地支持大量细粒度对象的复用。系统只使用少量的对象,而这些对象都很相似,状态变化很小,可以实现对象的多次复用。由于享元模式要求能够共享的对象必须是细粒度对象,因此它又称为轻量级模式ÿ…...
ubuntu系统(10):使用samba共享linux主机中文件
目录 一、samba安装步骤 1、Linux主机端操作 (1)安装sabma (2)修改samba配置文件 (3)为user_name用户设置samba访问的密码 (4)重启samba服务 2、Windows端 二、使用 1、代码…...

数据集成时表模型同步方法解析
01 背景介绍 数据治理的第一步,也是数据中台的一个基础功能 — 即将来自各类业务数据源的数据,同步集成至中台 ODS 层。业务数据源多种多样,单单可能涉及到的主流关系型数据库就有近十种。功能更加全面的数据中台通常还具有对接非关系型数据…...

彻底解决charles抓包https乱码的问题
最近做js逆向,听说charles比浏览器抓包更好用,结果发现全是乱码,根本没法用。 然后查询网上水文:全部都是装证书,根本没用! 最后终于找到解决办法,在这里记录一下: 乱码的根本原因…...
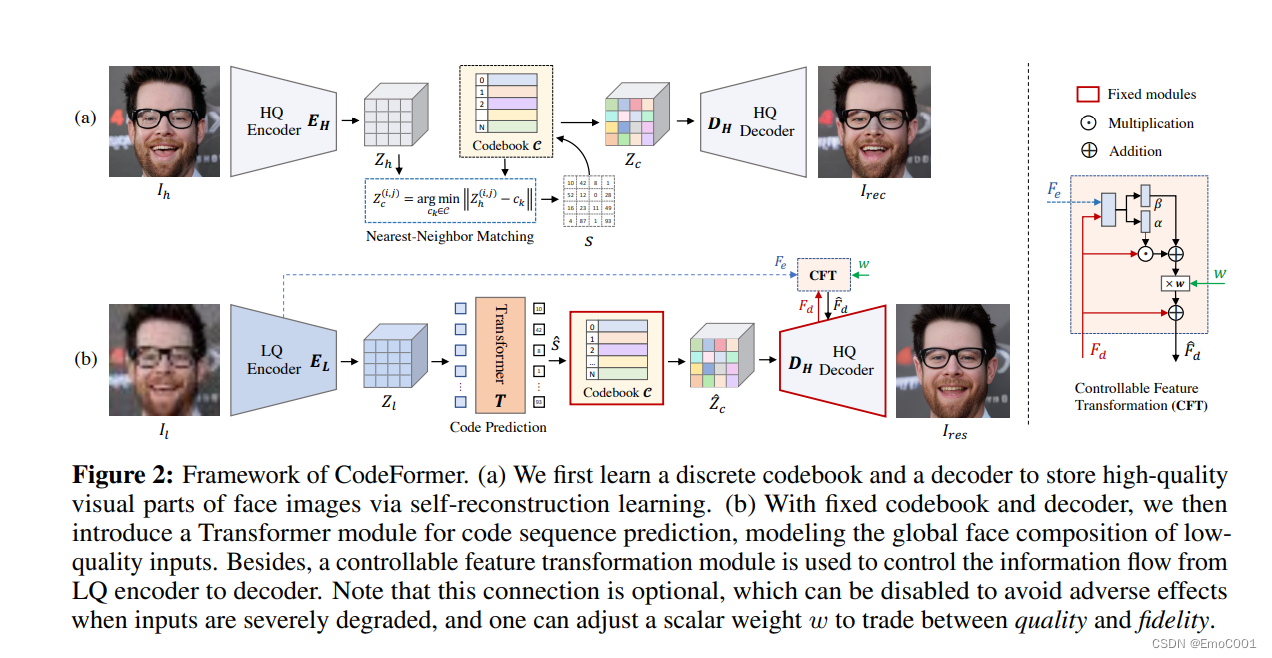
Towards Robust Blind Face Restoration with Codebook Lookup Transformer
Towards Real World Blind Face Restoration with Generative Facial Prior 这个projec相对codeformer已经是老一些的了,CodeFormer paper说自己的效果比这个更好。 有看了这个视频,它借用了R-ESRGAN 4x 和 GFPGAN 50%,既保留了一些人物特征…...

flutter3使用dio库发送FormData数据格式时候的坑,和get库冲突解决办法
问题描述 问题1:当你使用FormData.from(Flutter3直接不能用)的时候,可能会提示没有这个方法,或者使用FormData.fromMap(flutter3的dio支持)的时候也提示没有,这时候可能就是和get库里面的Formdata冲突了 问题1:The me…...

matlab读取pwm波数据,不用timer的方法,这里可以参考。Matlab/Simulink之STM32开发-编码器测速
这里提供了一个不用timer的方法,可以参考: https://blog.csdn.net/weixin_36967309/article/details/88699830 Matlab/Simulink之STM32开发-编码器测速...
使用 Python 创造你自己的计算机游戏(游戏编程快速上手)第四版:第十九章到第二十一章
十九、碰撞检测 原文:inventwithpython.com/invent4thed/chapter19.html 译者:飞龙 协议:CC BY-NC-SA 4.0 碰撞检测涉及确定屏幕上的两个物体何时相互接触(即发生碰撞)。碰撞检测对于游戏非常有用。例如,如…...

Multimodal Multitask Learning with a Unified Transformer
SNLI-VE dataset,natural language understanding tasks:MNLI,QNLI,QQP,SST-2 截止到发文时间的issue数,多吓人呐,不建议复现...
c指针和字符数组初学者比较好的例子
本练习的主题:一个对象的指针可以修改这个对象的内容; 注:对象是指一个固定大小的内存块。 #define _CRT_SECURE_NO_WARNINGS #include <stdio.h> #include <string.h> #include <stdlib.h> int getMem(char **p1,int *m…...
微信原生小程序上传与识别以及监听多个checkbox事件打开pdf
1.点击上传并识别 组件样式<van-field border"{{ false }}" placeholder"请输入银行卡卡号" model:value"{{bankNo}}" label"卡号"><van-icon bindtap"handleChooseImg" slot"right-icon" name"sca…...
关于C#中Monitor的wait/pulse的理解
wait:表示释放对象上的锁并阻止当前线程,直到它重新获取该锁。 pulse:表示通知等待队列中的线程锁定对象状态的更改。 当线程调用 Wait 时,它会释放对象上的锁并进入对象的等待队列。 对象的就绪队列中的下一个线程 (如果有一个…...

LeetCode 2894. 分类求和并作差
给你两个正整数 n 和 m 。 现定义两个整数 num1 和 num2 ,如下所示: num1:范围 [1, n] 内所有 无法被 m 整除 的整数之和。 num2:范围 [1, n] 内所有 能够被 m 整除 的整数之和。 返回整数 num1 - num2 。 示例 1: …...
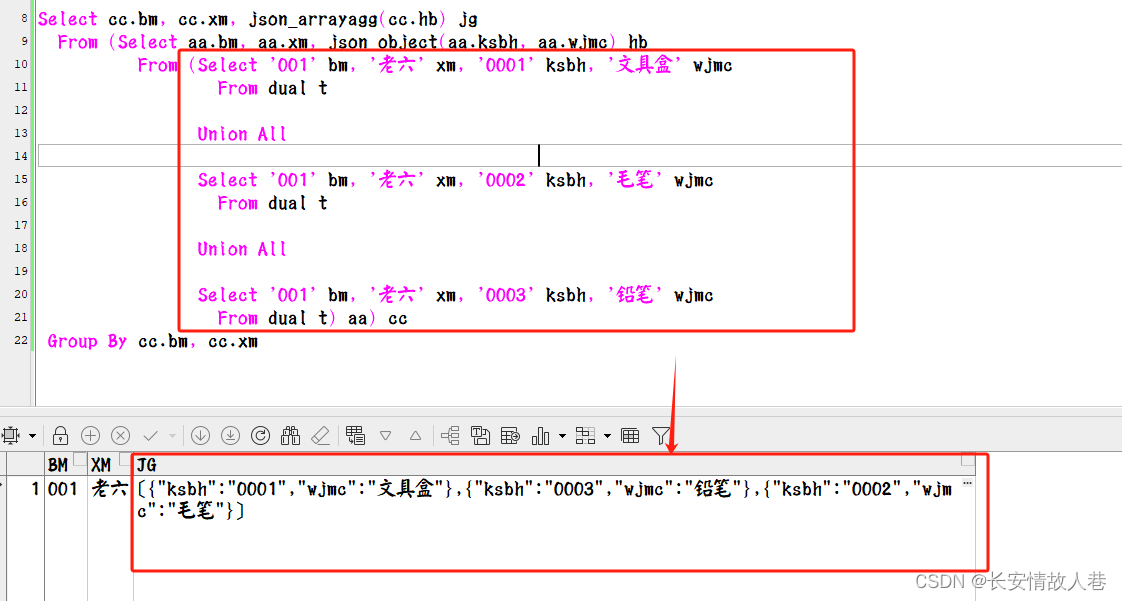
PLSQL 把多个字段转为json格式
PLSQL 把多个字段转为json格式 sql Select cc.bm, cc.xm, json_arrayagg(cc.hb) jgFrom (Select aa.bm, aa.xm, json_object(aa.ksbh, aa.wjmc) hbFrom (Select 001 bm, 老六 xm, 0001 ksbh, 文具盒 wjmcFrom dual tUnion AllSelect 001 bm, 老六 xm, 0002 ksbh, 毛笔 wjmcFr…...

国内环境 GitHub 拉取仓库速度慢的缓解方案
第一步: 浏览器打开如下两个网址,找到对应 IP 地址: GitHub.com - GitHub: Lets build from here GitHubgithub.global.ssl.fastly.net 假设对应 IP 地址分别为 140.82.xx.xxx 和 199.232.yy.yyy 第二步: 编辑 hosts 文件 sud…...
设计模式⑥ :访问数据结构
文章目录 一、前言二、Visitor 模式1. 介绍2. 应用3. 总结 三、Chain of Responsibility 模式1. 介绍2. 应用3. 总结 参考内容 一、前言 有时候不想动脑子,就懒得看源码又不像浪费时间所以会看看书,但是又记不住,所以决定开始写"抄书&q…...
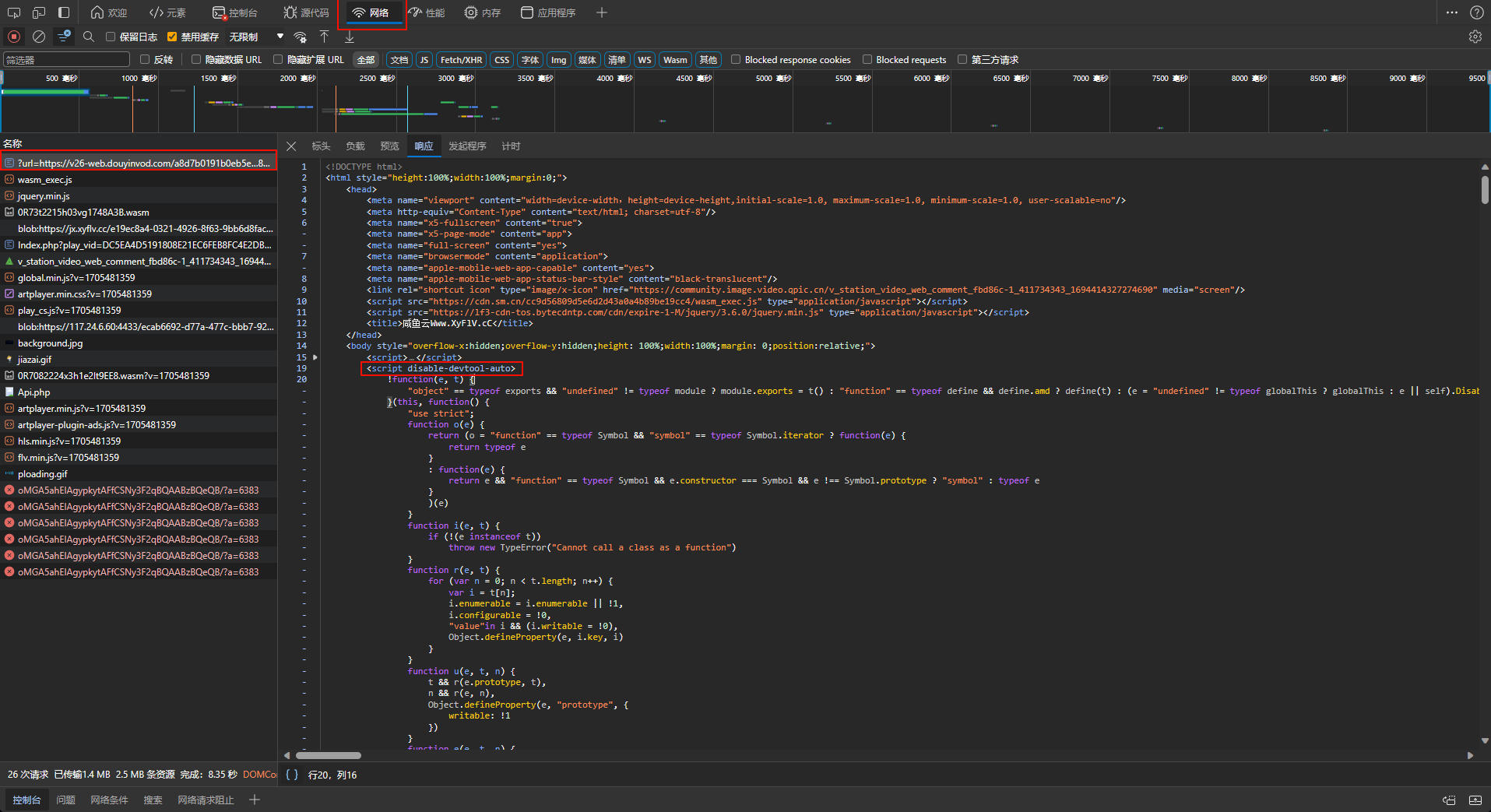
无法打开浏览器开发者工具的可能解决方法
网页地址: https://jx.xyflv.cc/?url视频地址url 我在抖音里面抓了一个视频地址, 获取到响应的json数据, 找到里面的视频地址信息 这个网站很好用: https://www.jsont.run/ 可以使用js语法对json对象操作, 找到所有视频的url地址 打开网页: https://jx.xyflv.cc/?urlhttps:…...

Android ANR 总结
工作之余,对之前学习到的和结合自己项目过程中的遇到的问题经验做一些总结,下面讲一讲Android开发过程中遇到的ANR的问题,做一下整理 一、概述 解决ANR一直是Android 开发者需要掌握的重要技巧,一般从三个方面着手。 开发阶段&a…...
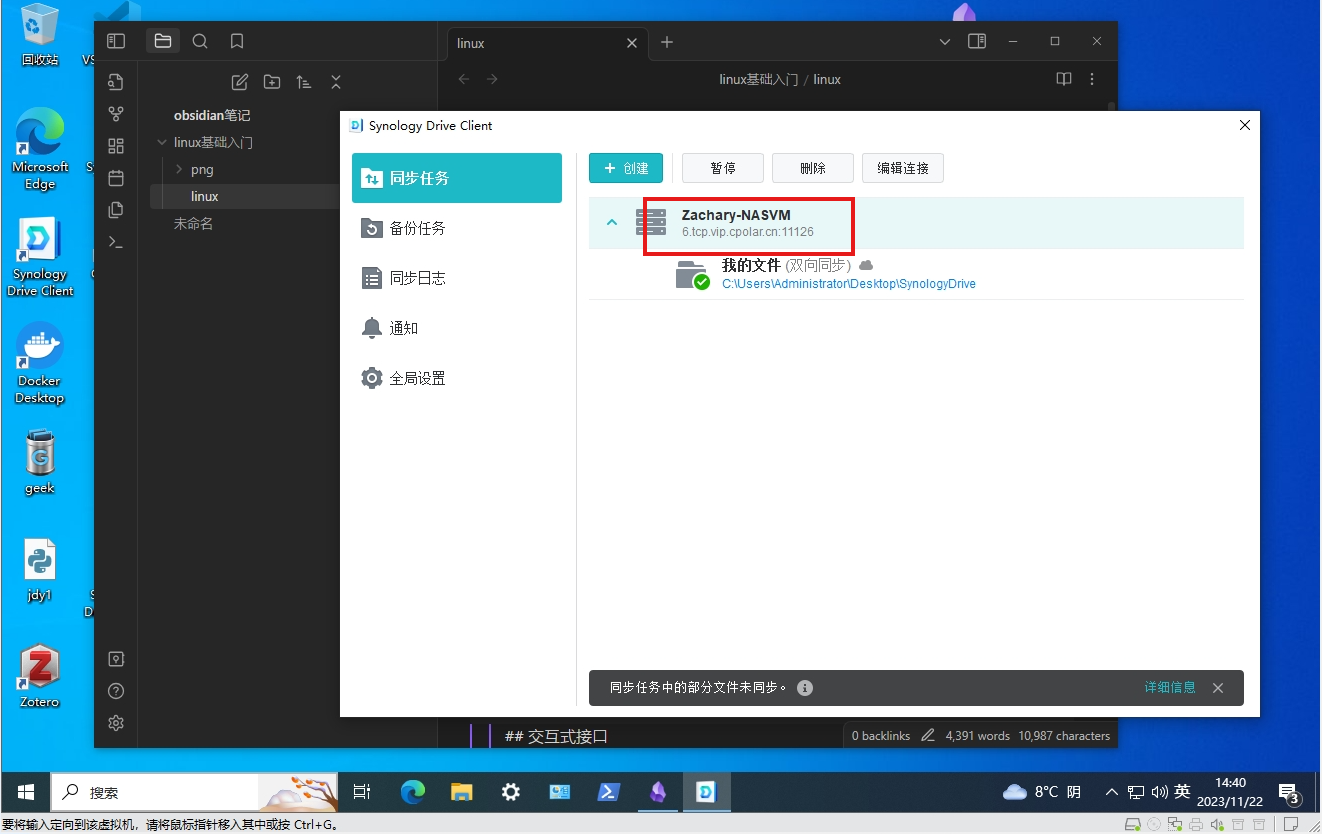
群晖Drive搭建云同步服务器结合内网穿透实现Obsidian笔记文件远程多端同步
文章目录 一、简介软件特色演示: 二、使用免费群晖虚拟机搭建群晖Synology Drive服务,实现局域网同步1 安装并设置Synology Drive套件2 局域网内同步文件测试 三、内网穿透群晖Synology Drive,实现异地多端同步Windows 安装 Cpolar步骤&#…...

Chrome密码恢复终极指南:3分钟快速找回所有浏览器密码
Chrome密码恢复终极指南:3分钟快速找回所有浏览器密码 【免费下载链接】chromepass Get all passwords stored by Chrome on WINDOWS. 项目地址: https://gitcode.com/gh_mirrors/chr/chromepass 你是否曾经忘记过保存在Chrome浏览器中的重要密码?…...

将Taotoken集成到自动化客服系统实现智能问答降本增效
🚀 告别海外账号与网络限制!稳定直连全球优质大模型,限时半价接入中。 👉 点击领取海量免费额度 将Taotoken集成到自动化客服系统实现智能问答降本增效 对于需要构建或升级智能客服系统的企业而言,核心诉求往往集中在…...

Aimmy AI瞄准辅助终极指南:从零开始到游戏高手
Aimmy AI瞄准辅助终极指南:从零开始到游戏高手 【免费下载链接】Aimmy Universal Second Eye for Gamers with Impairments (Universal AI Aim Aligner (AI Aimbot) - ONNX/YOLOv8 - C#) 项目地址: https://gitcode.com/gh_mirrors/ai/Aimmy Aimmy是一款基于…...

Super IO插件:Blender一键复制粘贴导入导出终极指南
Super IO插件:Blender一键复制粘贴导入导出终极指南 【免费下载链接】super_io blender addon for copy paste import / export 项目地址: https://gitcode.com/gh_mirrors/su/super_io 想要在Blender中实现一键导入导出模型和图像吗?Super IO插件…...
)
N8N + Cherry Studio 本地大模型对接|全踩坑保姆级指南(Docker 版)
标签:#N8N #CherryStudio #本地大模型 #AI自动化 #避坑指南 摘要:本文完整记录 Docker 部署的 N8N 对接 Cherry Studio 本地中转服务,从网络连通、接口鉴权、节点选型、模型命名等多维度,整理所有报错原因与可直接复制的解决方案&…...

告别字幕与水印:LTX 2.3工作流,一键高效清除,附详细使用方法。
一、LTX2.3功能介绍 核心功能:一键去除视频字幕和水印 工作流程: 上传视频 设置参数 设置提示词(提示词固定不变) 点击运行,即可输出没有水印和字幕的视频 ⬇️⬇️⬇️ 1.核心模型 水印去除模型字幕去除模型 2.模型…...

图片去水印软件哪个好用?2026免费工具对比测评|电脑手机全覆盖
去水印已经成为日常生活中的高频需求。无论是保存心仪的社交媒体内容、优化电商产品图片,还是整理个人素材库,一张带着平台水印的图片往往无法直接使用。但面对市面上琳琅满目的去水印方案,很多人都有同样的疑问:到底哪款软件最实…...

FModel完整指南:解锁虚幻引擎游戏资源的终极工具
FModel完整指南:解锁虚幻引擎游戏资源的终极工具 【免费下载链接】FModel Unreal Engine Archives Explorer 项目地址: https://gitcode.com/gh_mirrors/fm/FModel 你是否曾好奇《堡垒之夜》中的炫酷皮肤是如何制作的?或者想提取《Valorant》中的…...

N_m3u8DL-RE终极指南:如何高效下载加密流媒体视频
N_m3u8DL-RE终极指南:如何高效下载加密流媒体视频 【免费下载链接】N_m3u8DL-RE Cross-Platform, modern and powerful stream downloader for MPD/M3U8/ISM. English/简体中文/繁體中文. 项目地址: https://gitcode.com/GitHub_Trending/nm3/N_m3u8DL-RE 还…...

终极指南:3步实现Switch手柄在Windows PC上的完美XInput兼容
终极指南:3步实现Switch手柄在Windows PC上的完美XInput兼容 【免费下载链接】BetterJoy Allows the Nintendo Switch Pro Controller, Joycons and SNES controller to be used with CEMU, Citra, Dolphin, Yuzu and as generic XInput 项目地址: https://gitcod…...