ros2学习笔记-CLI工具,记录命令对应操作。
目录
- 环境变量
- turtlesim和rqt
- 以初始状态打开rqt
- node
- 启动节点
- 查看节点列表
- 查看节点更多信息
- 命令行参数 --ros-args
- topic
- 话题列表
- 话题类型
- 话题列表,附加话题类型
- 根据类型查找话题名
- 查看话题发布的数据
- 查看话题的详细信息
- 查看类型的详细信息
- 给话题发布消息(在命令行)
- 带有时间戳的消息
- 查看话题发布的频率Hz
- service
- 服务列表
- 服务类型
- 服务列表,附加服务类型
- 根据类型查找服务名
- 服务类型结构
- 调用服务
- parameters
- 参数列表
- 获取参数值
- 设置参数值
- 获取节点所有参数
- 为节点加载参数
- 启动时指定节点参数
- action
- 通信方式
- 动作列表
- 动作列表,附加类型
- 动作更多信息
- 动作类型结构
- 发送动作目标
- 发送动作目标,要求有稳定的反馈
- topic,service,action的区别
- 使用 rqt_console 查看特定日志消息
- 启动
- 过滤某些级别的消息
- 启动节点(Launching nodes)
- 记录和播放数据
- 记录单个topic
- 记录多个topic
- 查看记录信息
- 记录回放
环境变量
启动前要检查环境变量:ROS_DOMAIN_ID 和 ROS_LOCALHOST_ONLY。如果通信时PIN不同,应该首先考虑是不是环境变量设置错误。 Configuring environment
记得source一下ros2。
echo "source /opt/ros/humble/setup.bash" >> ~/.bashrc
turtlesim和rqt
Turtlesim 是一款用于学习 ROS2 的轻量级模拟器。 它说明了 ROS 2 在最基本的层面上做了什么,让您了解以后将如何处理真实机器人或机器人模拟。
ros2 工具是用户管理、内省和与 ROS 系统交互的方式。 它支持针对系统及其操作的不同方面的多个命令。 人们可能会使用它来启动节点、设置参数、收听话题等等。 ros2工具是核心 ROS2 安装的一部分。
rqt 是 ROS2 的图形用户界面 (GUI)工具。 在 rqt 中完成的所有操作都可以在命令行上完成,但 rqt 提供了一种更用户友好的方式来操作 ROS2 元素。
以初始状态打开rqt
rqt每次启动都会以上次关闭时的状态打开,如果rqt界面出现了什么异常卡顿(比如某个页面无法点击,或者无法滑动),可以通过下面命令像第一次打开rqt一样。
rqt --clear-config
node
启动节点
ros2 run <package_name> <executable_name>
查看节点列表
ros2 node list
查看节点更多信息
可以看到节点的话题信息(subscribers and publishers),服务信息(services), 动作信息(action servers and action clients)。
ros2 node info <node_name> "一般是/node_name"
命令行参数 --ros-args
ROS的命令行参数
--remap
ros2 run some_package some_ros_executable --ros-args --remap foo:=bar
ros2 run some_package some_ros_executable --ros-args -r foo:=bar
ros2 run some_package some_ros_executable --ros-args -r some_node:foo:=bar--param
ros2 run some_package some_ros_executable --ros-args --param string_param:=test
ros2 run some_package some_ros_executable --ros-args -p string_param:=test
ros2 run some_package some_ros_executable --ros-args -p some_node:string_param:=test--params-file
ros2 run some_package some_ros_executable --ros-args --params-file params_file.yaml
<params_file.yaml>
node0_name:ros__parameters:param0_name: param0_value...paramN_name: paramN_value
...
nodeM_name:ros__parameters:...
* 匹配由斜线划分的单个令牌。** 匹配由斜线划分的零或更多令牌。不允许部分匹配(例如foo*)。
例如:
/**:ros__parameters:string_param: foo
将在所有节点上设置参数string_param./**/some_node:ros__parameters:string_param: foo
将在任何名称空间中的some_node上设置parameter string_param./foo/*:ros__parameters:string_param: foo
将在名称空间 /foo下的任何节点上设置参数string_param(例如只匹配到foo/foo1 而不会匹配到foo/foo1/foo11).
topic
话题可以理解为是ROS中节点交换消息的总线。
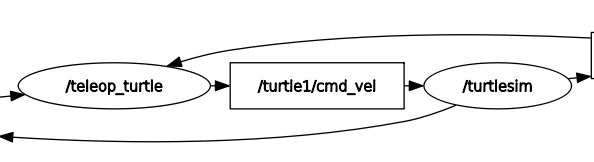
在图中查看节点和话题之间的结构:
rqt_graph
圆的是节点,方的是话题。
话题列表
ros2 topic list
话题类型
ros2 topic type <topic_name>
话题列表,附加话题类型
类型其实就是消息结构(消息属于哪个类)。
ros2 topic list -t
根据类型查找话题名
ros2 topic find <type_name>
查看话题发布的数据
ros2 topic echo <topic_name>
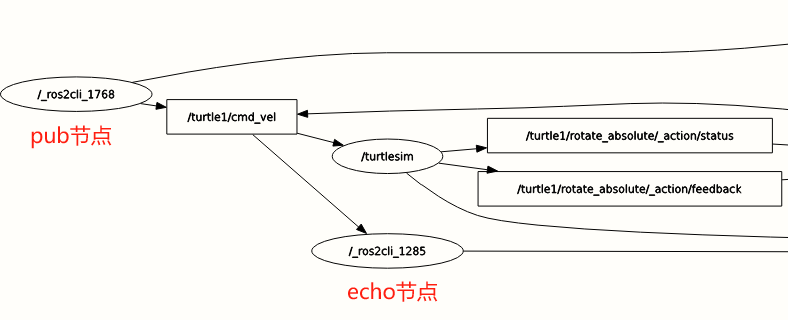
注意:数据只有在发布时终端才可以看到。
此命令会发布一个新话题,话题名字类似于/_ros2cli_26646,在rqt_graph中取消选中Debug即可看见。
查看话题的详细信息
可以查看话题的消息类型,以及其被多少个节点发布消息和被多少个节点订阅。
ros2 topic info <topic_name>
查看类型的详细信息
这里的类型不只是话题的类型可以被查看,其他类型也可以使用此方法看到具体的结构信息。
ros2 interface show <msg type>
查看所有类型的列表
ros2 interface list
以ros2 interface show geometry_msgs/msg/Twist为例,显示的类型如下:
# This expresses velocity in free space broken into its linear and angular parts.
Vector3 linearfloat64 xfloat64 yfloat64 z
Vector3 angularfloat64 xfloat64 yfloat64 z
其中,linear和angular可以理解为一个变量,Vector3 是变量的类型,x,y,z是linear/angular的成员,也是变量。
给话题发布消息(在命令行)
'<args>'参数需要以yaml语法作为输入。
ros2 topic pub <topic_name> <msg_type> '<args>'
'<args>'使用单引号和双引号是等价的,都可以使用。
例如:ros2 topic pub --once /turtle1/cmd_vel geometry_msgs/msg/Twist "{linear: {x: 2.0, y: 0.0, z: 0.0}, angular: {x: 0.0, y: 0.0, z: 1.8}}"(格式和echo显示的结果是一样的)
--once是一个可选的参数,意为“发布一条消息然后退出”。--rate 1:以1Hz的频率持续发布消息(为默认参数设置)。- <args>是yaml格式的,每一个冒号后面的空格都不可以省略。
在rqt-graph中显示如下:
带有时间戳的消息
如果消息的header为完整的标题类型std_msgs/msg/Header(有没有可以通过interface show 查看),设置为auto会自动填充为当前时间。
ros2 topic pub /pose geometry_msgs/msg/PoseStamped '{header: "auto", pose: {position: {x: 1.0, y: 2.0, z: 3.0}}}'
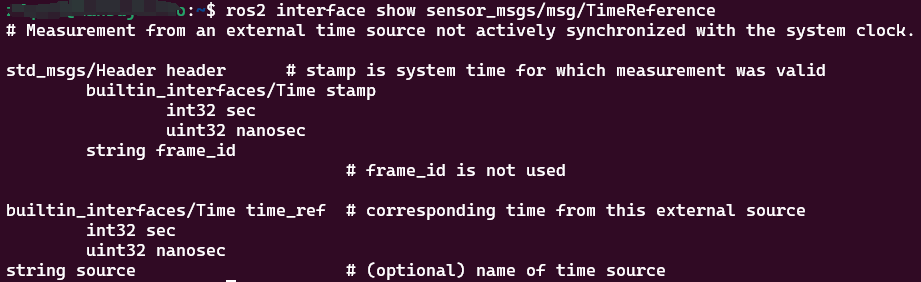
如果消息中的类型为builtin_interfaces/msg/Time,可以设置now
ros2 topic pub /reference sensor_msgs/msg/TimeReference '{header: "auto", time_ref: "now", source: "dumy"}'
sensor_msgs/msg/TimeReference 结构如下:
查看话题发布的频率Hz
ros2 topic hz <topic_name>
service
服务是节点的另一种通信方法,基于呼叫和响应(call-and-response)模型,话题是publisher-subscriber模型。服务只有在客户端专门调用时才提供数据。
服务列表
ros2 service list
服务类型
服务类型的定义与话题类型类似,但是服务类型有两个部分:一条是请求的消息,另一条是响应的消息。
ros2 service type <service_name>
服务列表,附加服务类型
ros2 service list -t
根据类型查找服务名
ros2 service find <type_name>
服务类型结构
查看方法:
ros2 interface show <type_name>
结构:
request structure
---
response structure
---是request structure 和 response structure 的分隔符。
调用服务
ros2 service call <service_name> <service_type> <arguments>
例如:ros2 service call /spawn turtlesim/srv/Spawn "{x: 2, y: 2, theta: 0.2, name: ''}"
会返回:
requester: making request: turtlesim.srv.Spawn_Request(x=2.0, y=2.0, theta=0.2, name='')response:
turtlesim.srv.Spawn_Response(name='turtle2')
parameters
参数是节点(node)的配置值,每个节点都维护自己的参数,也有共享参数(和C++很像,有私有成员,也有静态成员)。
参数列表
ros2 param list
获取参数值
ros2 param get <node_name> <parameter_name>
设置参数值
ros2 param set <node_name> <parameter_name> <value>
获取节点所有参数
ros2 param dump <node_name>
如果想将参数存入到文件中,可以使用linux中的>运算符:
ros2 param dump /turtlesim > turtlesim.yaml
导出为yaml结构,以后使用时可以直接导入。
为节点加载参数
ros2 param load <node_name> <parameter_file>
例如:ros2 param load /turtlesim turtlesim.yaml
需要注意的是只读的参数只能在启动时进行修改,所以那些参数将不会被修改。
启动时指定节点参数
ros2 run <package_name> <executable_name> --ros-args --params-file <file_name>
例如:ros2 run turtlesim turtlesim_node --ros-args --params-file turtlesim.yaml
这将使得所有参数根据给定的文件更新,具体细节见ROS的命令行参数。
action
action基于topic和service。它的功能类似于service。但是action的特点是:动作不仅可以被取消,还提供了稳定的反馈(service只能返回一个单独的回复response)。
action由三个部分组成:目标,反馈和结果。
操作使用client-server模型,类似于Publisher-Subscriber模型。 “action client”节点将目标发送到“action server”节点,该节点确认目标并返回反馈和结果。
当调用:
ros2 run turtlesim turtle_teleop_key
终端会显示:
Reading from keyboard
---------------------------
Use arrow keys to move the turtle.
Use G|B|V|C|D|E|R|T keys to rotate to absolute orientations. 'F' to cancel a rotation.'Q' to quit.
Use arrow keys to move the turtle.对应topic,
Use G|B|V|C|D|E|R|T keys to rotate to absolute orientations. ‘F’ to cancel a rotation. ‘Q’ to quit.对应action。
每次按下这些按键时,都会将目标发送到/turtlesim节点的action服务器上。一旦乌龟旋转完成,乌龟节点会返回一个信息,比如:[INFO] [turtlesim]: Rotation goal completed successfully ,实际上不同的动作对应不同的反馈信息和结果。
对于动作而言,client可以取消目标(按下F),server也可以取消目标(连续按下D G,server会自动放弃第一个目标,但不是所有的server都是这样处理)。
通信方式
执行ros2 node info /turtlesim可以看到最下方关于action的信息:
Action Servers:/turtle1/rotate_absolute: turtlesim/action/RotateAbsoluteAction Clients:
这说明/turtlesim节点会接受/turtle1/rotate_absolute提供的目标并且给它提供反馈。
执行ros2 node info /teleop_turtle可以看到最下方关于action的信息:
Action Servers:Action Clients:/turtle1/rotate_absolute: turtlesim/action/RotateAbsolute
这说明/teleop_turtle节点会发送目标给/turtle1/rotate_absolute。
动作列表
ros2 action list
动作列表,附加类型
ros2 action list -t
动作更多信息
会返回动作的客户端和服务端节点。
ros2 action info /turtle1/rotate_absolute
动作类型结构
以turtlesim/action/RotateAbsolute类型为例:
ros2 interface show turtlesim/action/RotateAbsolute
返回:
# The desired heading in radians
float32 theta
---
# The angular displacement in radians to the starting position
float32 delta
---
# The remaining rotation in radians
float32 remaining
分成了三部分,其中---是分隔符,第一部分是目标,第二部分是结果,第三部分是反馈信息。
发送动作目标
ros2 action send_goal <action_name> <action_type> '<values>'
<values>需要采用YAML格式。
例如:ros2 action send_goal /turtle1/rotate_absolute turtlesim/action/RotateAbsolute "{theta: 1.57}"
发送动作目标,要求有稳定的反馈
ros2 action send_goal /turtle1/rotate_absolute turtlesim/action/RotateAbsolute "{theta: -1.57}" --feedback
会返回:
Sending goal:theta: -1.57Goal accepted with ID: e6092c831f994afda92f0086f220da27Feedback:remaining: -3.1268222332000732Feedback:remaining: -3.1108222007751465…Result:delta: 3.1200008392333984Goal finished with status: SUCCEEDED
其中Feedback会持续提供反馈信息,直到目标达到。
topic,service,action的区别
| 通信机制 | 描述 | 使用场景 |
|---|---|---|
| Topic | 一种异步消息队列,分为publisher(发送信息)和subscriber(接受消息) | 处理连续数据流,多对多的形式 |
| Service | 一种同步请求/响应交互模式(发送一次,反馈/响应一次) | 一部分定义请求部分,一部分定义回应部分 |
| Action | 一种异步请求/响应交互模式,带有反馈机制(发送一个目标,执行过程中连续反馈,直到达到目标) | 需要反馈/状态跟踪,需要花费大量时间,可以被中断 |
使用 rqt_console 查看特定日志消息
启动
ros2 run rqt_console rqt_console
过滤某些级别的消息
只查看级别大于等于WARN的日志消息。
ros2 run turtlesim turtlesim_node --ros-args --log-level WARN #大小写都可以
ROS2的日志级别按严重性排序:
Fatal
Error
Warn
Info
Debug
默认级别是Info,因此看不到级别为Debug的消息。
如果设置显示的消息级别是Warn,那么Info和Debug级别的消息都会被显示。
启动节点(Launching nodes)
使用命令行工具一次启动多个节点。
ros2 launch turtlesim multisim.launch.py
这会启动两个turtlesim node,使用ros2 topic list可以看到两个node分别为turtlesim1和turtlesim2:
/parameter_events
/rosout
/turtlesim1/turtle1/cmd_vel
/turtlesim1/turtle1/color_sensor
/turtlesim1/turtle1/pose
/turtlesim2/turtle1/cmd_vel
/turtlesim2/turtle1/color_sensor
/turtlesim2/turtle1/pose
因此我们可以开两个终端来分别控制两个节点:
ros2 topic pub /turtlesim1/turtle1/cmd_vel geometry_msgs/msg/Twist "{linear: {x: 2.0, y: 0.0, z: 0.0}, angular: {x: 0.0, y: 0.0, z: 1.8}}"ros2 topic pub /turtlesim2/turtle1/cmd_vel geometry_msgs/msg/Twist "{linear: {x: 2.0, y: 0.0, z: 0.0}, angular: {x: 0.0, y: 0.0, z: -1.8}}"
注意:
也可以使用XML和YAML来创建启动文件。 具体细节可以查看Using Python, XML, and YAML for ROS 2 Launch Files
对于launch的更多信息可以查看ROS2 launch tutorials
记录和播放数据
记录有关topic的数据,因此可以随时重播和检查。
记录单个topic
ros2 bag record <topic_name>
例如:ros2 bag record /turtle1/cmd_vel
这会根据时间戳来创建bag文件的名称,想要指定文件名称可以用-o来指定。
记录多个topic
记录多个topic时直接输入多个topic名称,用空格隔开。
ros2 bag record -o subset <topic1_name> <topic2_name>
-o选项允许为bag文件选择一个唯一的名称。这里的subset就是要创建的文件目录名称。
例如:ros2 bag record -o subset /turtle1/cmd_vel /turtle1/pose
查看记录信息
ros2 bag info <bag_file_name>
例如:ros2 bag info subset
记录回放
ros2 bag play <bag_file_name>
有关ros bag更详细的信息在这里找到:https://github.com/ros2/rosbag2。
相关文章:
ros2学习笔记-CLI工具,记录命令对应操作。
目录 环境变量turtlesim和rqt以初始状态打开rqt node启动节点查看节点列表查看节点更多信息命令行参数 --ros-args topic话题列表话题类型话题列表,附加话题类型根据类型查找话题名查看话题发布的数据查看话题的详细信息查看类型的详细信息给话题发布消息࿰…...

自然语言处理的发展
自然语言处理的发展大致经历了四个阶段:萌芽期、快速发展期、低谷的发展期和复苏融合期。 萌芽期(1956年以前):这个阶段可以看作自然语言处理的基础研究阶段。人类文明经过了几千年的发展,积累了大量的数学、语言学和…...
flink operator 拉取阿里云私有镜像(其他私有类似)
创建 k8s secret kubectl --namespace flink create secret docker-registry aliyun-docker-registry --docker-serverregistry.cn-shenzhen.aliyuncs.com --docker-usernameops_acr1060896234 --docker-passwordpasswd --docker-emailDOCKER_EMAIL注意命名空间指定你使用的 我…...
C语言算法赛——蓝桥杯(省赛试题)
一、十四届C/C程序设计C组试题 十四届程序C组试题A#include <stdio.h> int main() {long long sum 0;int n 20230408;int i 0;// 累加从1到n的所有整数for (i 1; i < n; i){sum i;}// 输出结果printf("%lld\n", sum);return 0; }//十四届程序C组试题B…...
【文本到上下文 #2】:NLP 的数据预处理步骤
一、说明 欢迎阅读此文,NLP 爱好者!当我们继续探索自然语言处理 (NLP) 的广阔前景时,我们已经在最初的博客中探讨了它的历史、应用和挑战。今天,我们更深入地探讨 NLP 的核心——数据预处理的复杂世界。 这篇文章是我们的“完整 N…...
Minio文件分片上传实现
资源准备 MacM1Pro 安装Parallels19.1.0请参考 https://blog.csdn.net/qq_41594280/article/details/135420241 MacM1Pro Parallels安装CentOS7.9请参考 https://blog.csdn.net/qq_41594280/article/details/135420461 部署Minio和整合SpringBoot请参考 https://blog.csdn.net/…...
C语言总结十一:自定义类型:结构体、枚举、联合(共用体)
本篇博客详细介绍C语言最后的三种自定义类型,它们分别有着各自的特点和应用场景,重点在于理解这三种自定义类型的声明方式和使用,以及各自的特点,最后重点掌握该章节常考的考点,如:结构体内存对齐问题&…...

解决Spring Boot应用打包后文件访问问题
在Spring Boot项目的开发过程中,一个常见的挑战是如何有效地访问和操作资源文件。这一挑战尤其显著当应用从IDE环境(如IntelliJ IDEA)迁移到被打包成JAR文件后的生产环境。开发者经常遇到的问题是,在IDE中运行正常的代码ÿ…...

循环神经网络的变体模型-LSTM、GRU
一.LSTM(长短时记忆网络) 1.1基本介绍 长短时记忆网络(Long Short-Term Memory,LSTM)是一种深度学习模型,属于循环神经网络(Recurrent Neural Network,RNN)的一种变体。…...

视频图像的color range简介
介绍 研究FFmpeg发现,在avcodec.h中有关于color的解释,主要有四个属性,primaries、transfer、space和range。 color primaries: 基于RGB空间对应的绝对颜色XYZ的变换,决定了最终三原色RGB分别是什么颜色;…...

tcp的三次握手
http 和 https 都是是基于 TCP 的请求,https 是 http 加上 tls 连接。TCP 是面向连接的协议。 对于 http1.1 协议chrome 限制在同一个域名下最多可以建立 6 个 tcp 连接,所以如果在同一个域名下,同时有超过 6 个请求发生,那么多余…...

unity 矩阵探究
public void MatrixTest1(){ ///Matrix4x4 是列矩阵,就是一个vector4表示一列,所以在c#中矩阵和Vector4只能矩阵右乘坐标。但是在shader中是矩阵左乘坐标,所以在shader中是行矩阵 Matrix4x4 moveMatrix1 new Matrix4x4(new Vector4(1,0,0,0)…...
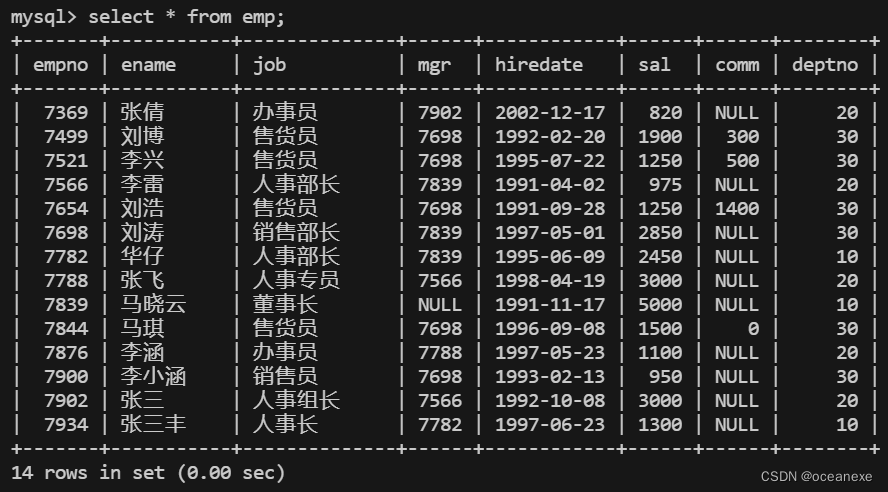
MySQL---单表查询综合练习
创建emp表 CREATE TABLE emp( empno INT(4) NOT NULL COMMENT 员工编号, ename VARCHAR(10) COMMENT 员工名字, job VARCHAR(10) COMMENT 职位, mgr INT(4) COMMENT 上司, hiredate DATE COMMENT 入职时间, sal INT(7) COMMENT 基本工资, comm INT(7) COMMENT 补贴, deptno INT…...

Python项目——搞怪小程序(PySide6+Pyinstaller)
1、介绍 使用python编写一个小程序,回答你是猪吗。 点击“是”提交,弹窗并退出。 点击“不是”提交,等待5秒,重新选择。 并且隐藏了关闭按钮。 2、实现 新建一个项目。 2.1、设计UI 使用Qt designer设计一个UI界面,…...

MySQL练习题
参考:https://blog.csdn.net/paul0127/article/details/82529216 数据表介绍 --1.学生表 Student(SId,Sname,Sage,Ssex) --SId 学生编号,Sname 学生姓名,Sage 出生年月,Ssex 学生性别 --2.课程表 Course(CId,Cname,TId) --CId 课程编号,Cname 课程名称,TId 教师编号…...

vue-项目打包、配置路由懒加载
1. 简介 在现代前端开发中,Vue.js因其简洁、灵活和高效的特点,已经成为许多开发者的首选框架。 在Vue项目中,打包部署和路由懒加载是两个非常重要的环节。 打包Vue项目是为了将源代码转换为浏览器可以解析的JavaScript文件,以便…...

词语的魔力:语言在我们生活中的艺术与影响
Words That Move Mountains: The Art and Impact of Language in Our Lives 词语的魔力:语言在我们生活中的艺术与影响 Hello there, wonderful people! Today, I’d like to gab about the magical essence of language that’s more than just a chatty tool in o…...

android List,Set,Map区别和介绍
List 元素存放有序,元素可重复 1.LinkedList 链表,插入删除,非线性安全,插入和删除操作是双向链表操作,增加删除快,查找慢 add(E e)//添加元素 addFirst(E e)//向集合头部添加元素 addList(E e)//向集合…...
Mysql 编译安装部署
Mysql 编译安装部署 环境: 172.20.26.198(Centos7.6) 源码安装Mysql-5.7 大概步骤如下: 1、上传mysql-5.7.28.tar.gz 、boost_1_59_0.tar 到/usr/src 目录下 2、安装依赖 3、cmake 4、make && make install 5、…...

【目标检测】YOLOv5算法实现(九):模型预测
本系列文章记录本人硕士阶段YOLO系列目标检测算法自学及其代码实现的过程。其中算法具体实现借鉴于ultralytics YOLO源码Github,删减了源码中部分内容,满足个人科研需求。 本系列文章主要以YOLOv5为例完成算法的实现,后续修改、增加相关模…...

MPh 开源项目教程
MPh 开源项目教程 【免费下载链接】MPh Pythonic scripting interface for Comsol Multiphysics 项目地址: https://gitcode.com/gh_mirrors/mp/MPh 项目介绍 MPh 是一个基于 Python 的强大开源项目,旨在简化数学物理问题的求解过程。它结合了符号计算的灵活…...

别再截图了!用AD21把PCB 3D模型直接塞进PDF,客户评审一目了然
用AD21将PCB 3D模型嵌入PDF:提升设计评审效率的终极方案 在硬件开发流程中,设计评审环节往往成为项目推进的瓶颈。传统方式下,工程师不得不反复截取多角度2D图纸,或录制繁琐的演示视频,既耗费时间又难以全面展示设计细…...

Intel 14代酷睿接口更迭:技术推演与用户决策指南
1. 项目概述:一次关于“接口更迭”的深度技术推演最近,关于下一代酷睿处理器的传闻又开始在圈内流传,一个核心的焦点再次被推上风口浪尖:Intel 14代酷睿(Raptor Lake Refresh)可能又要更换CPU插槽接口了。这…...

Zynq开发中XSA文件更新全流程:从硬件修改到软件调试
1. 项目概述:为什么需要更新XSA文件?在基于Xilinx Zynq系列SoC的开发流程里,XSA文件(Xilinx Support Archive)是一个承上启下的核心枢纽。它本质上是一个压缩包,里面封装了硬件平台(Hardware Pl…...

2026全球AI公司终极排名:从字节跳登顶到Claude Code称霸,十大巨头全维对比
2026全球AI公司终极排名:从字节跳登顶到Claude Code称霸,十大巨头全维对比 从字节跳动登顶到SpaceX 600亿美元收购Cursor,2026年的AI牌桌已经彻底重洗。本文带你一次性搞清全球AI格局。 目录 2026全球AI公司权威排名十大AI公司深度介绍AI编程助手终极对比AI Agent…...

一个从零实现的 CUDA 大模型推理引擎
我写了一个从零实现的 CUDA 大模型推理引擎 最近我在做一个比较硬核的小项目:用 C / CUDA 从零实现一个大模型推理引擎。 项目地址: https://github.com/luogantt/LLM-inference-engine 这个项目当前主要面向 DeepSeek-R1-Distill-Qwen-7B 的单 batc…...

别再死磕CNN了!用Python从零实现一个3层GCN,带你理解图数据怎么玩
从传统CNN到图卷积:用Python实战3层GCN的底层逻辑 当我们在处理社交网络中的用户关系、电商平台上的购买行为或是蛋白质分子结构时,数据的拓扑关系往往比像素网格复杂得多。传统的卷积神经网络(CNN)在规则网格上表现出色ÿ…...

为OpenClaw工作流配置Taotoken作为统一模型供应商
🚀 告别海外账号与网络限制!稳定直连全球优质大模型,限时半价接入中。 👉 点击领取海量免费额度 为OpenClaw工作流配置Taotoken作为统一模型供应商 如果你正在使用OpenClaw构建复杂的Agent工作流,管理多个Agent的模型…...

M9A:重返未来1999终极解放双手指南 - 智能助手让你的游戏体验更轻松
M9A:重返未来1999终极解放双手指南 - 智能助手让你的游戏体验更轻松 【免费下载链接】M9A 重返未来:1999 小助手 | Assistant For Reverse: 1999 项目地址: https://gitcode.com/gh_mirrors/m9/M9A 你是否曾经为《重返未来:1999》的日…...

Zynq-7000 Linux系统构建全流程:从Vivado硬件配置到内核启动调试
1. 项目概述:为什么要在Zynq上折腾Linux?如果你手头有一块Xilinx Zynq-7000系列(比如我用的黑金Zynq7020)开发板,并且想把它从一个单纯的FPGA逻辑验证平台,变成一个能跑完整操作系统、可以灵活编程、还能用…...