手把手带你在Linux上安装带GPU加速的opencv库(C++版本)
1.安装依赖
sudo apt-get install build-essential cmake git libgtk2.0-dev pkg-config libavcodec-dev libavformat-dev libswscale-dev
sudo apt-get install python-dev python-numpy python3-dev python3-numpy
sudo apt-get install libtbb2 libtbb-dev libjpeg-dev libpng-dev libtiff-dev libjasper-dev libdc1394-22-dev
出现下面类似错误E: unable to locate libjasper-dev,运行以下命令.

sudo add-apt-repository "deb http://mirrors.tuna.tsinghua.edu.cn/ubuntu-ports/ xenial main multiverse restricted universe"
sudo apt update
sudo apt-get install build-essential cmake git libgtk2.0-dev pkg-config libavcodec-dev libavformat-dev libswscale-dev
提示没有E: unable to locate libjasper-dev这个包,需要添加数字签名:
sudo add-apt-repository "deb http://security.ubuntu.com/ubuntu xenial-security main"
sudo apt-get update
sudo apt-key adv --keyserver keyserver.ubuntu.com --recv-keys 3B4FE6ACC0B21F32
sudo apt update
sudo apt-get install libtbb2 libtbb-dev libjpeg-dev libpng-dev libtiff-dev libjasper-dev libdc1394-22-dev
检查一下有没有漏装依赖(非常重要,否则后续会失败)
sudo apt-get install libjpeg-dev libpng-dev libtiff-dev
sudo apt-get install libavcodec-dev libavformat-dev libswscale-dev libv4l-devsudo apt-get install build-essential
sudo apt-get install cmake git libgtk2.0-dev pkg-config libavcodec-dev libavformat-dev libswscale-dev
sudo apt-get install python-dev python-numpy libtbb2 libtbb-dev libjpeg-dev libpng-dev libtiff-dev libjasper-dev libdc1394-22-dev # 处理图像所需的包
sudo apt-get install libavcodec-dev libavformat-dev libswscale-dev libv4l-dev liblapacke-dev
sudo apt-get install libxvidcore-dev libx264-dev # 处理视频所需的包
sudo apt-get install libatlas-base-dev gfortran # 优化opencv功能
sudo apt-get install ffmpeg
需要出现这面这行提示,说明依赖安装好了

2.编译opencv
下载源码
git clone https://github.com/opencv/opencv.git
git clone https://github.com/opencv/opencv_contrib.git
在opencv文件夹内新建build文件夹

编译
cmake \-D CMAKE_BUILD_TYPE=RELEASE \-D OPENCV_GENERATE_PKGCONFIG=ON \-D CMAKE_INSTALL_PREFIX=/usr/local \-D OPENCV_EXTRA_MODULES_PATH= /home/opencv_contrib/modules \-D CUDA_CUDA_LIBRARY=/usr/local/cuda/lib64/stubs/libcuda.so \-D CUDA_ARCH_BIN=7.5 \-D CUDA_ARCH_PTX="" \-D WITH_CUDA=ON \-D WITH_TBB=ON \-D BUILD_NEW_PYTHON_SUPPORT=ON \-D WITH_V4L=ON \-D INSTALL_C_EXAMPLES=ON \-D INSTALL_PYTHON_EXAMPLES=ON \-D BUILD_EXAMPLES=ON \-D WITH_QT=ON \-D WITH_OPENGL=ON \-D ENABLE_FAST_MATH=1 \-D CUDA_FAST_MATH=1 \-D WITH_CUBLAS=1 \-D WITH_NVCUVID=ON \-D BUILD_opencv_cudacodec=OFF ..
-
-D OPENCV_EXTRA_MODULES_PATH= /home/opencv_contrib/modules需要填写你自己的opencv_contrib路径 -
-D CUDA_ARCH_BIN=7.5根据你的显卡去官网查看,我的显卡是2060,所以CUDA_ARCH_BIN=7.5(CUDA GPUs - Compute Capability | NVIDIA Developer)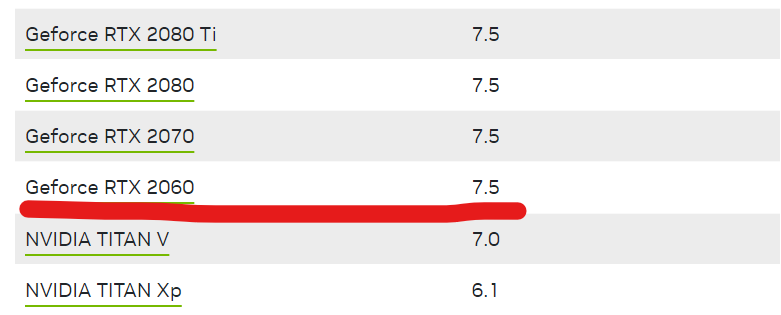
其它地方默认
编译过程需要等待较长时间…………
发现报错,需要将opencv_contrib中的modules中的cudev文件夹复制到opencv/modules里
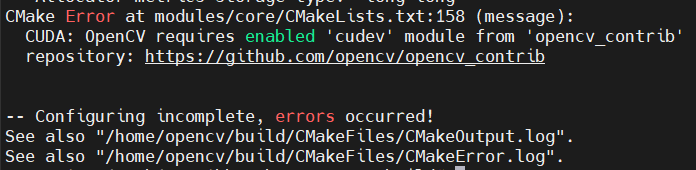
cp -r /home/opencv_contrib/modules/cudev /home/opencv/modules/
继续编译
出现下列提示,说明该步骤成功

执行一下两条命令,安装带gpu的opencv库
sudo make -j7
sudo make install
3.配置环境
在/etc/ld.so.conf.d/文件夹下有一个opencv.conf,里面需要写入/usr/local/lib。
cd /etc/ld.so.conf.d/
sudo touch opencv.conf
sudo sh -c 'echo "/usr/local/lib" > opencv.conf'
更新pkg-config:
sudo ldconfig
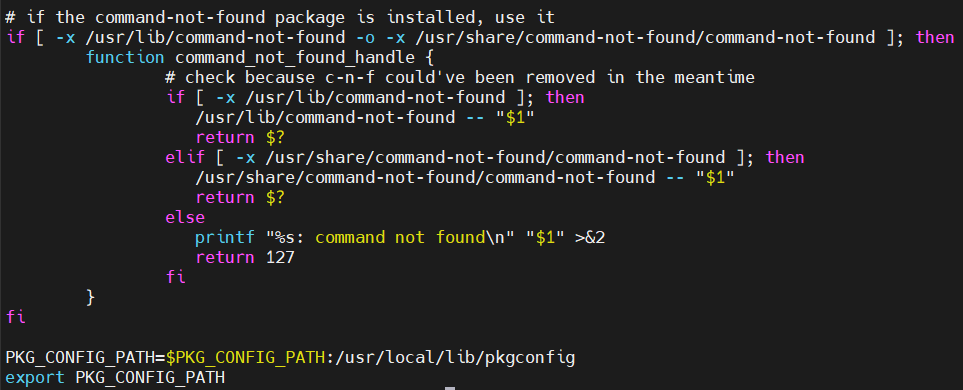
打开/etc/bash.bashrc文件,在最后两行加上这两句话
PKG_CONFIG_PATH=$PKG_CONFIG_PATH:/usr/local/lib/pkgconfig
export PKG_CONFIG_PATH
最后效果如图:
执行这三句
source /etc/bash.bashrc
sudo apt install mlocate
sudo updatedb
4.测试opencv
cd 到/opencv/samples/cpp/example_cmake目录下,依次执行以下命令:
cmake .
make
./opencv_example
该测试需要电脑有摄像头,若启动摄像头看到了画面,说明安装成功;若未启动摄像头,但出现如下显示,也安装成功:

测试GPU功能
新建一个main.cpp文件,代码如下:
#include <iostream>
#include <opencv2/core.hpp>
#include <opencv2/highgui.hpp>
#include "opencv2/core/cuda.hpp"
using namespace cv;
using namespace std;int main() {int num_devices = cv::cuda::getCudaEnabledDeviceCount();if (num_devices <= 0) {std::cerr << "There is no device." << std::endl;return -1;}int enable_device_id = -1;for (int i = 0; i < num_devices; i++) {cv::cuda::DeviceInfo dev_info(i);if (dev_info.isCompatible()) {enable_device_id = i;}}if (enable_device_id < 0) {std::cerr << "GPU module isn't built for GPU" << std::endl;return -1;}cv::cuda::setDevice(enable_device_id);std::cout << "GPU is ready, device ID is " << num_devices << "\n";return 0;
}
新建一个CMakeLists.txt文件,代码如下
# cmake needs this line
cmake_minimum_required(VERSION 3.1)# Define project name
project(ImageShow)# Find OpenCV, you may need to set OpenCV_DIR variable
# to the absolute path to the directory containing OpenCVConfig.cmake file
# via the command line or GUI
find_package(OpenCV REQUIRED)# Enable C++11
set(CMAKE_CXX_STANDARD 11)
set(CMAKE_CXX_STANDARD_REQUIRED TRUE)# Declare the executable target built from your sources
add_executable(ImageShow main.cpp)# Link your application with OpenCV libraries
target_link_libraries(ImageShow PRIVATE ${OpenCV_LIBS})运行以下命令:
cmake .
make
./ImageShow
若出现下面信息,则说明Linux上成功安装带GPU加速的opencv库(C++版本)🎉🎉🎉

5.参考资料
Ubuntu 20.04搭建OpenCV 4.5.0 & C++环境_opencv4 ubuntu20.04-CSDN博客
Linux安装OpenCV4(可选GPU加速) - 知乎 (zhihu.com)
Ubuntu 20.04搭建OpenCV 4.5.0 & C++环境_opencv4 ubuntu20.04-CSDN博客
Linux安装OpenCV4(可选GPU加速) - 知乎 (zhihu.com)
Ubuntu22.04安装opencv依赖包libjasper-dev出现unable to locate libjasper-dev的终极解决办法_ubuntu libjasper库-CSDN博客
相关文章:
手把手带你在Linux上安装带GPU加速的opencv库(C++版本)
1.安装依赖 sudo apt-get install build-essential cmake git libgtk2.0-dev pkg-config libavcodec-dev libavformat-dev libswscale-dev sudo apt-get install python-dev python-numpy python3-dev python3-numpy sudo apt-get install libtbb2 libtbb-dev libjpeg-dev l…...

【Linux】软件包管理器 yum | vim编辑器
前言: 软件包管理器 yum和vim编辑器讲解 文章目录 软件包管理器 yum编辑器-vim四种模式普通模式批量化注释和批量化去注释末行模式临时文件 软件包管理器 yum yum(Yellowdog Updater, Modified)是一个在基于 RPM(管理软件包的格式和工具集合&…...

vue常见问题
文章目录 data为什么是一个函数,而不是一个对象?什么情况下可以使用对象?key的作用,为什么不能用Index?render函数,h函数,和template什么关系?vue 是怎么解析template的? template会…...
ArcgisForJS基础
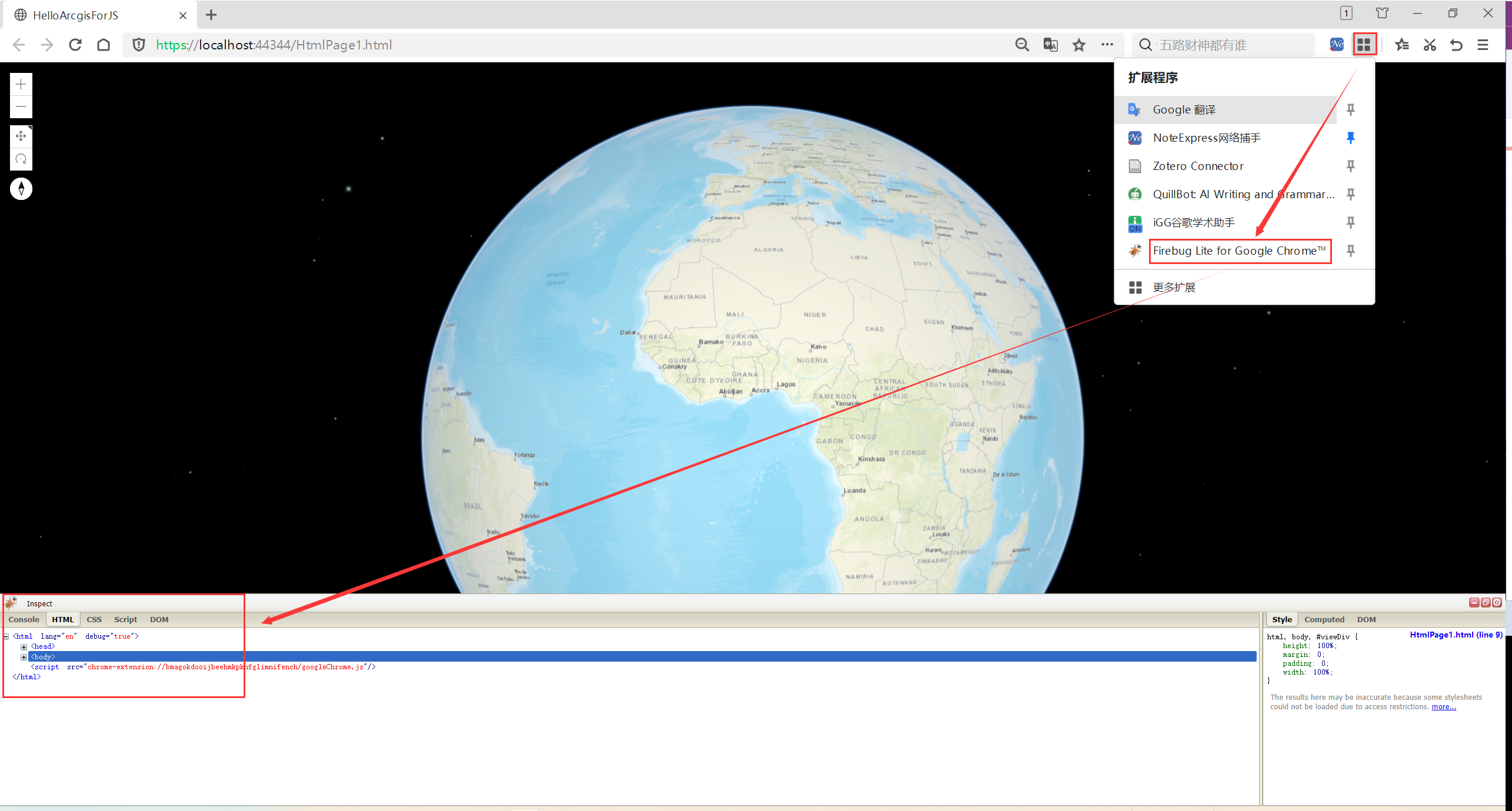
文章目录 0.引言1.第一个ArcgisForJS应用程序1.1.安装部署ArcgisForJS1.2.实现ArcgisForJS应用程序 2.开发与调试工具2.1.集成开发环境2.2.调试工具2.3.Firebug 0.引言 ArcGIS API for JavaScript是一款由Esri公司开发的用于创建WebGIS应用的JavaScript库。它允许开发者通过调…...
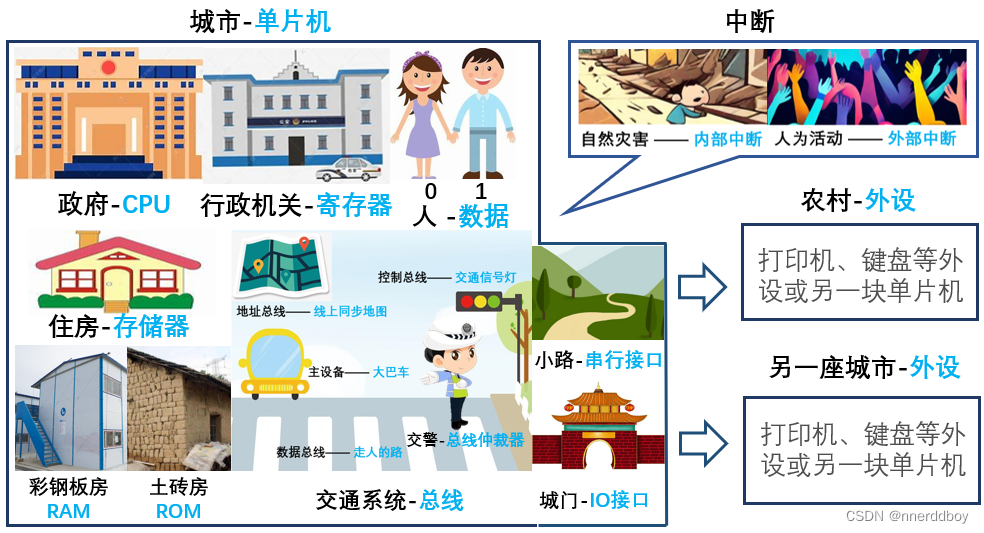
白话微机:5.解释串行接口以及一些考研面试问题
一. 前言(回顾世界观) 很久很久以前,有这样一个世界,这个世界有着现实世界一样的元素:那里的人又有一个别的名字叫做“数据”,人有0有1;人们也有住房,这些住房在这个世界叫做“存储器…...

版本控制(Git)
Fork 本课程网站的仓库 将版本历史可视化并进行探索是谁最后修改了 README.md文件?(提示:使用 git log 命令并添加合适的参数)最后一次修改_config.yml 文件中 collections: 行时的提交信息是什么?(提示&am…...

USB-C音频转接器:实现边充电边听歌的新选择 | LDR6020P
随着科技浪潮的推进,Type-C接口已逐渐成为电子设备的主流选择,以其正反随意插、高速传输和强大功能等独特优势,在日常生活中占据越来越重要的地位。而Type-C音频转接器,作为连接Type-C接口与音频设备的桥梁,正引领着音…...

C/C++ 怎么把多个静态库给整合成一个静态库?
来源:https://www.wikitechy.com/tutorials/linux/how-to-merge-two-ar-static-libraries-into-one 使用 libtool (这也是可移植性最强的方式)(但这通常要求两个子库也是 libtool 制作的) libtool --modelink cc -static -o libaz.la libab…...

OBD部署OceanBase集群-配置文件方式
前一篇文章介绍了OBD白屏可视化方式部署OceanBase集群 ,其原理是把可视化设置生成为一个配置文件,然后使用OBD命令部署集群 本篇想使用命令行加配置文件方式,只部署OceanBase和ODProxy两个组件 服务器参数配置和 oceanbase-all-in-one-*.ta…...
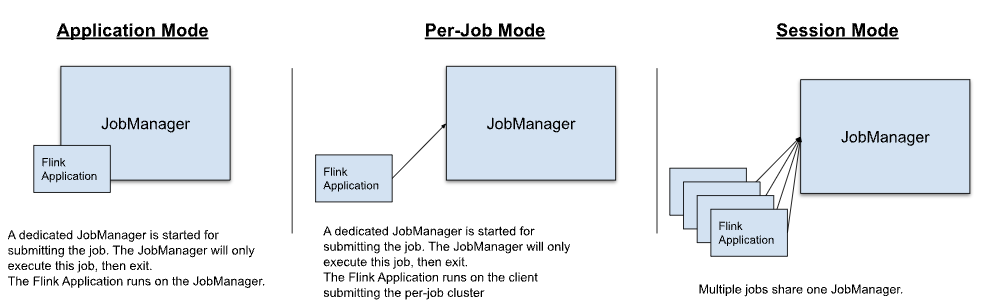
Flink介绍
Flink 介绍 文章目录 Flink 介绍1. 简介1.1 背景1.2 用途 2. 核心概念2.1 流(Stream)2.2 转换(Transformation)2.3 窗口(Window)2.4 状态(State) 3. 编程模型3.1 编程模型介绍3.2 程…...
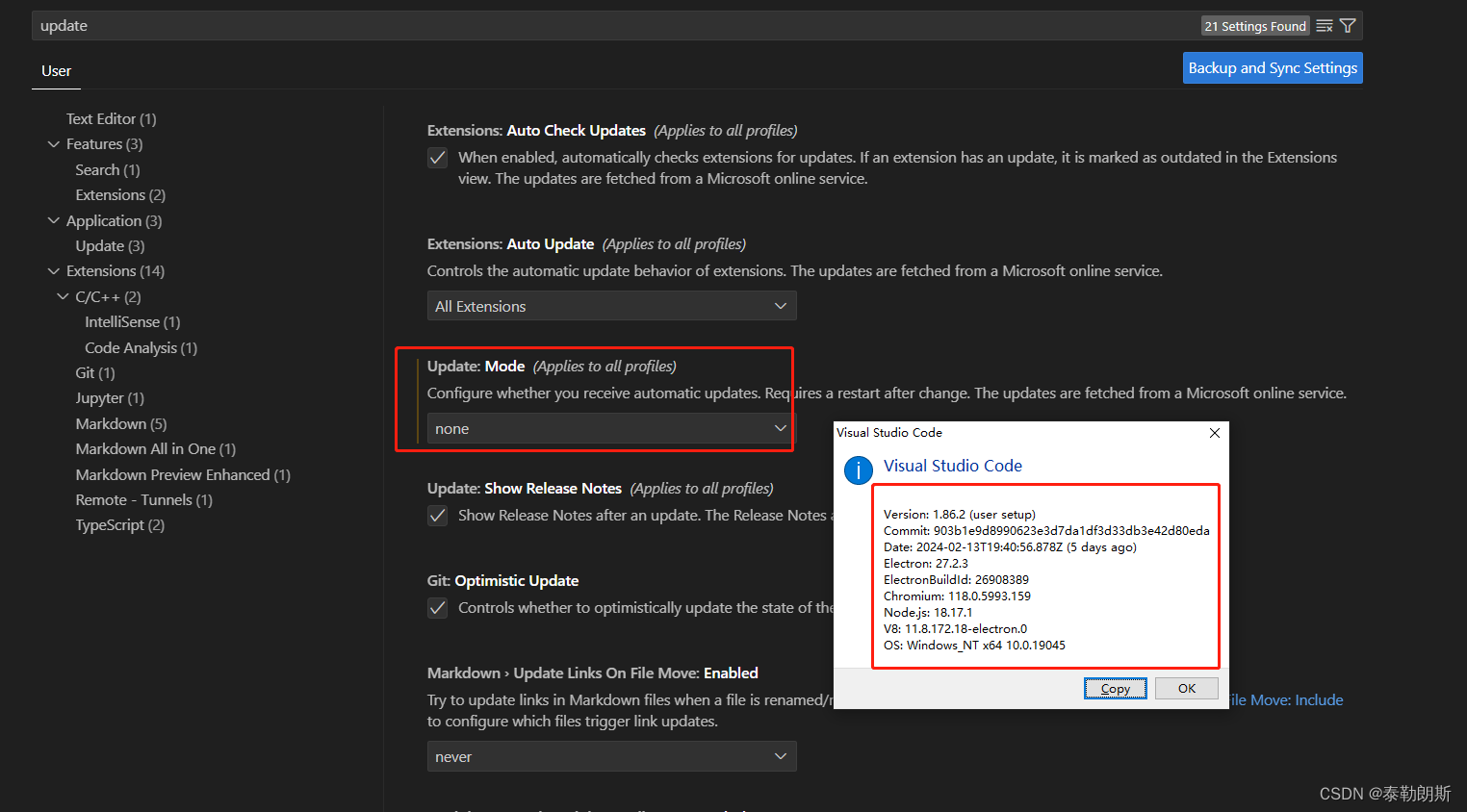
vscode突然连不上服务器了,以前都可以的,并且ssh等其它方式是可以连接到服务器的
过完年回来准备开工干活,突然发现vscode连不上服务器了,奇了怪了,年前都可以的,看了一下报错,如下, 以为是服务器挂了,结果执行ssh xxxxxx 发现是可以远程连接的,看来服务器没有问题…...

【shell】Shell学习后篇
Linux 常用 Shell 文章目录 Linux 常用 ShellBanner设置字体颜色设置提示操作系统操作系统版本号系统处理器架构关闭防火墙和SELinux系统操作防火墙相关获取当前目录判断文件是否存在判断目录是否存在后台挂起静默执行判断之前的命令是否成功 Banner 设置字体颜色 RED\033[31…...

协同程序原理
一、协程的本质 //协程可以分为两个部分 //1.协程函数本体 //2.协程调度器 //协程本体就是一个能够中间暂停返回的函数 //协程调度器是Unity内部实现的,会在对应的时机帮我们继续执行协程函数 //Unity只实现了协程调度器部分 //协程的本体本质上就是 C#的一个迭代…...

怎样保证数据库和redis里的数据一致性
使用缓存更新策略:在更新数据库时,同时更新Redis中相应的数据。这可以通过编写代码来实现,在数据库更新操作完成后,同步更新Redis中对应的数据。这可以通过在代码中使用事务来保证更新的原子性,确保数据库和Redis中的数…...
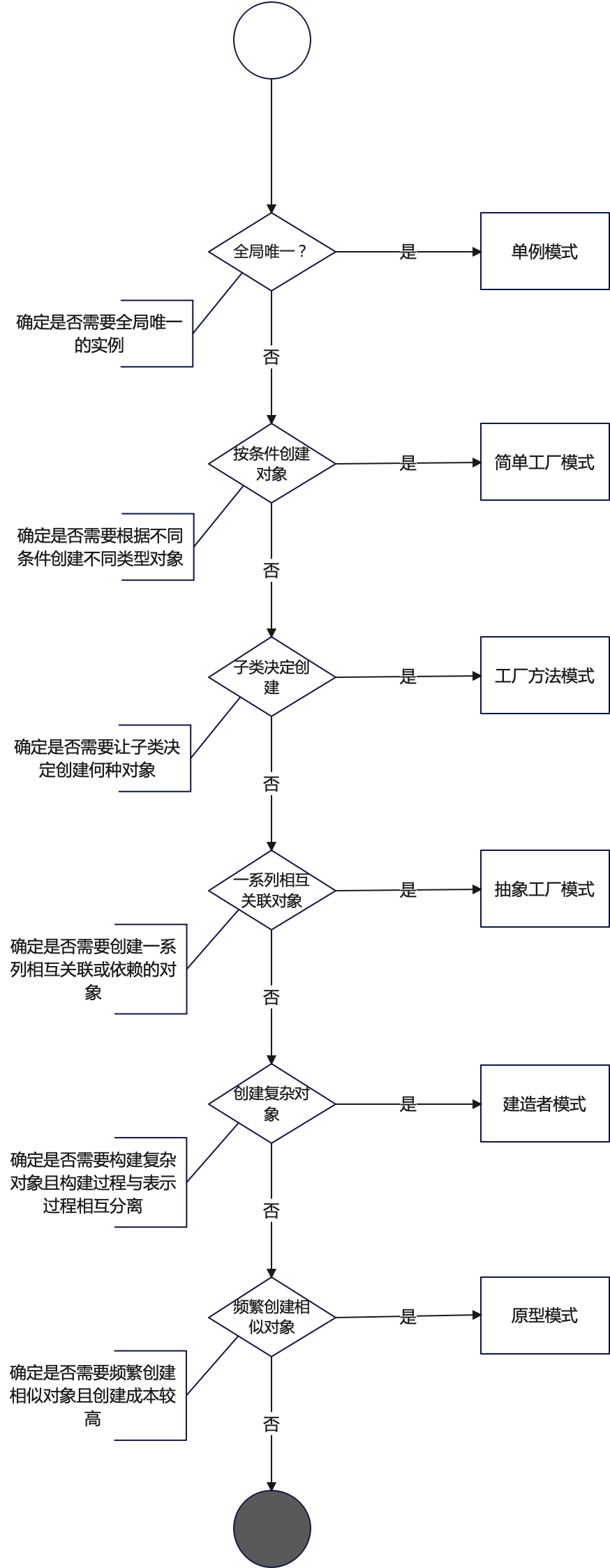
探索设计模式的魅力:创建型设计模式的比较与决策
设计模式专栏:http://t.csdnimg.cn/U54zu 目录 一、设计模式概览 1.1 创建型模式 二、比较创建型设计模式 1.1 适用场景典型用例 1.2 关键要素与差异对比 1.3 结构图 三、模式选择指南 3.1 场景分析 3.2 决策流程图 四、结语 4.1 优势 4.2 考量因素 一、…...

Linux之Shell
第 1 章 Shell 概述 1)Linux 提供的 Shell 解析器有 [zhaohadoop101 ~]$ cat /etc/shells /bin/sh /bin/bash /usr/bin/sh /usr/bin/bash /bin/tcsh /bin/csh2)bash 和 sh 的关系 [zhaohadoop101 bin]$ ll | grep bash -rwxr-xr-x. 1 root root 941880…...

nginx upstream server主动健康检测模块添加https检测功能[完整版]
目录 1 缘起1.1 功能定义2. 实现后的效果2.1 配置文件2.2 运行效果3. 代码实现3.1 配置指令3.1.1 配置指令定义:3.1.2 配置指令结构体:3.1.3 配置指令源码定义:3.2 模块的初始化3.3 添加新的健康检测类型的定义3.4 握手完成后的处理3. 5 发送http请求3.6 接收http响应3.7 连…...

django中admin页面汉化
在Django中,将admin界面汉化为中文需要进行一些配置和翻译文件的添加。下面是一个基本的步骤指南,帮助你实现Django admin的汉化: 一:安装并配置Django: 如果你还没有安装Django,首先通过pip安装它: pip…...
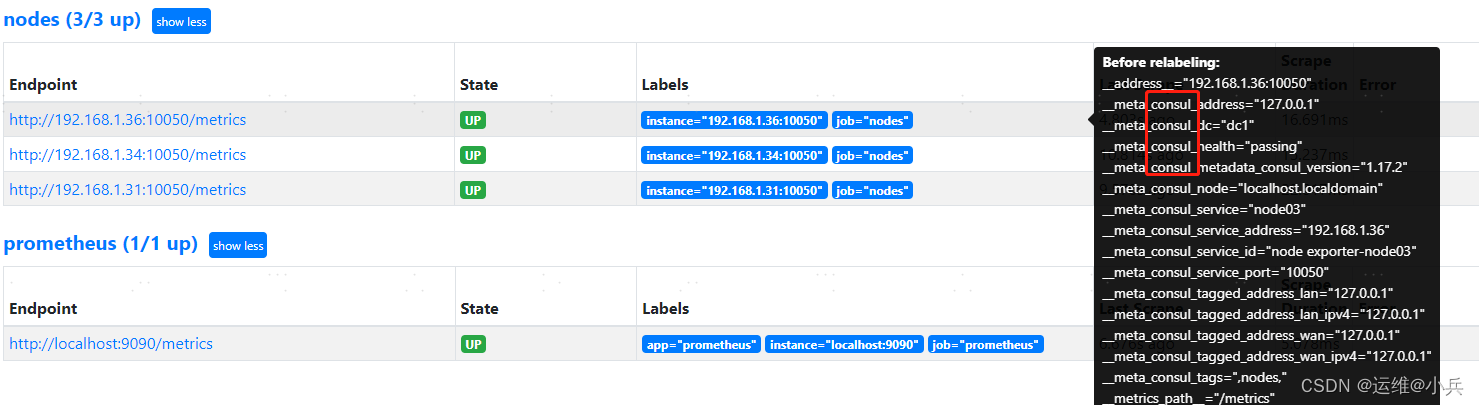
prometheus基于consul的服务发现
文章目录 一、基础二、安装consul下载地址启动consul访问consul 三、编写服务发现文件nodes.json四、prometheus配置consul发现修改prometheus.yml重启Prometheus 参考 一、基础 二、安装consul 下载地址 https://developer.hashicorp.com/consul/install 启动consul mkdi…...
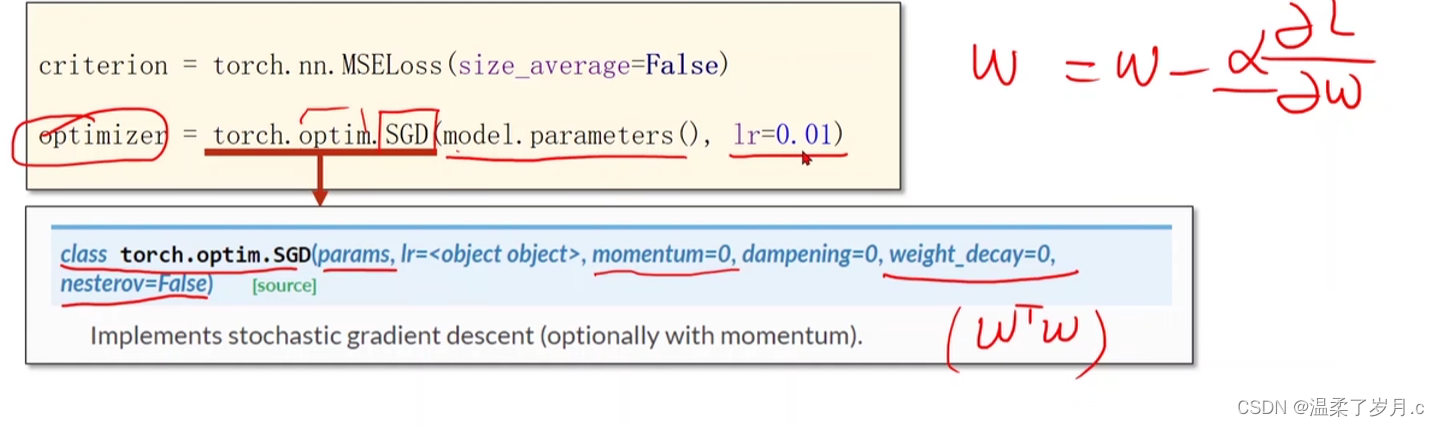
深度学习之pytorch实现线性回归
度学习之pytorch实现线性回归 pytorch用到的函数torch.nn.Linearn()函数torch.nn.MSELoss()函数torch.optim.SGD() 代码实现结果分析 pytorch用到的函数 torch.nn.Linearn()函数 torch.nn.Linear(in_features, # 输入的神经元个数out_features, # 输出神经元个数biasTrue # 是…...

3分钟快速汉化:HS2-HF_Patch开源工具一键安装、多插件支持、中文游戏体验指南
3分钟快速汉化:HS2-HF_Patch开源工具一键安装、多插件支持、中文游戏体验指南 【免费下载链接】HS2-HF_Patch Automatically translate, uncensor and update HoneySelect2! 项目地址: https://gitcode.com/gh_mirrors/hs/HS2-HF_Patch 还在为Honey Select 2…...

从零开始在个人项目中接入Taotoken并完成首次计费消费
🚀 告别海外账号与网络限制!稳定直连全球优质大模型,限时半价接入中。 👉 点击领取海量免费额度 从零开始在个人项目中接入Taotoken并完成首次计费消费 作为一名个人开发者,在尝试将大模型能力集成到自己的项目中时&a…...
Zotero PDF Translate:打破语言壁垒的学术翻译神器
Zotero PDF Translate:打破语言壁垒的学术翻译神器 【免费下载链接】zotero-pdf-translate Translate PDF, EPub, webpage, metadata, annotations, notes to the target language. Support 20 translate services. 项目地址: https://gitcode.com/gh_mirrors/zo/…...

高效突破小红书反爬:7个实用User-Agent伪装技巧与实战指南
高效突破小红书反爬:7个实用User-Agent伪装技巧与实战指南 【免费下载链接】XHS-Downloader 小红书(XiaoHongShu、RedNote)链接提取/作品采集工具:提取账号发布、收藏、点赞、专辑作品链接;提取搜索结果作品、用户链接…...

网络性能周报 - {日期范围}
网络性能周报 - {日期范围} 【免费下载链接】iperf3-win-builds iperf3 binaries for Windows. Benchmark your network limits. 项目地址: https://gitcode.com/gh_mirrors/ip/iperf3-win-builds 执行摘要 平均带宽:{bandwidth} Mbps ({变化率}%)最大延迟&…...

AppImageLauncher终极指南:10分钟掌握Linux便携应用系统集成
AppImageLauncher终极指南:10分钟掌握Linux便携应用系统集成 【免费下载链接】AppImageLauncher Helper application for Linux distributions serving as a kind of "entry point" for running and integrating AppImages 项目地址: https://gitcode.c…...

体验Taotoken聚合端点带来的高稳定性与低延迟模型调用
🚀 告别海外账号与网络限制!稳定直连全球优质大模型,限时半价接入中。 👉 点击领取海量免费额度 体验Taotoken聚合端点带来的高稳定性与低延迟模型调用 作为一名需要频繁调用大模型API的开发者,我曾管理着多个项目&am…...

GetQzonehistory:3分钟学会永久保存QQ空间记忆的终极免费方案
GetQzonehistory:3分钟学会永久保存QQ空间记忆的终极免费方案 【免费下载链接】GetQzonehistory 获取QQ空间发布的历史说说 项目地址: https://gitcode.com/GitHub_Trending/ge/GetQzonehistory 你是否曾担心QQ空间里那些珍贵的青春记忆会随着时间流逝而消失…...

如何用Flut Renamer高效管理文件:跨平台批量重命名完整指南
如何用Flut Renamer高效管理文件:跨平台批量重命名完整指南 【免费下载链接】renamer Flut Renamer - A bulk file renamer written in flutter (dart). Available on Linux, Windows, Android, iOS and macOS. 项目地址: https://gitcode.com/gh_mirrors/ren/ren…...

LSLib终极指南:轻松解锁《神界原罪》和《博德之门3》MOD制作之门
LSLib终极指南:轻松解锁《神界原罪》和《博德之门3》MOD制作之门 【免费下载链接】lslib Tools for manipulating Divinity Original Sin and Baldurs Gate 3 files 项目地址: https://gitcode.com/gh_mirrors/ls/lslib LSLib是一款专门为《神界原罪》系列和…...