计算机设计大赛 深度学习的视频多目标跟踪实现
文章目录
- 1 前言
- 2 先上成果
- 3 多目标跟踪的两种方法
- 3.1 方法1
- 3.2 方法2
- 4 Tracking By Detecting的跟踪过程
- 4.1 存在的问题
- 4.2 基于轨迹预测的跟踪方式
- 5 训练代码
- 6 最后
1 前言
🔥 优质竞赛项目系列,今天要分享的是
基于深度学习的视频多目标跟踪实现
该项目较为新颖,适合作为竞赛课题方向,学长非常推荐!
🧿 更多资料, 项目分享:
https://gitee.com/dancheng-senior/postgraduate
2 先上成果

3 多目标跟踪的两种方法
3.1 方法1
基于初始化帧的跟踪,在视频第一帧中选择你的目标,之后交给跟踪算法去实现目标的跟踪。这种方式基本上只能跟踪你第一帧选中的目标,如果后续帧中出现了新的物体目标,算法是跟踪不到的。这种方式的优点是速度相对较快。缺点很明显,不能跟踪新出现的目标。
3.2 方法2
基于目标检测的跟踪,在视频每帧中先检测出来所有感兴趣的目标物体,然后将其与前一帧中检测出来的目标进行关联来实现跟踪的效果。这种方式的优点是可以在整个视频中跟踪随时出现的新目标,当然这种方式要求你前提得有一个好的“目标检测”算法。
学长主要分享Option2的实现原理,也就是Tracking By Detecting的跟踪方式。
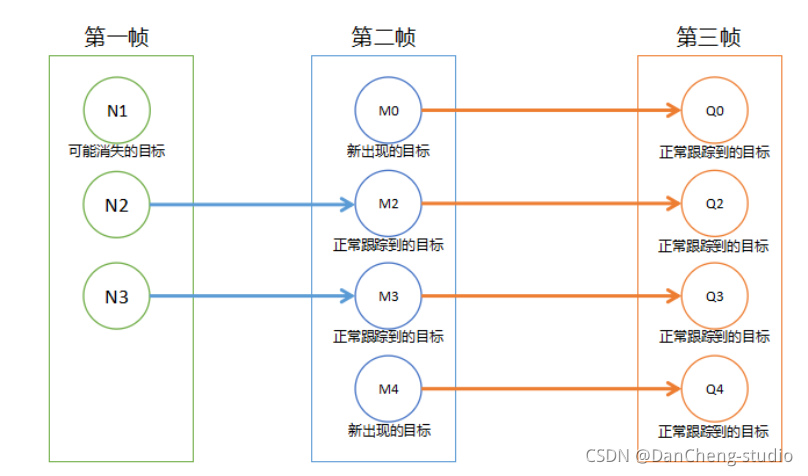
4 Tracking By Detecting的跟踪过程
**Step1:**使用目标检测算法将每帧中感兴趣的目标检测出来,得到对应的(位置坐标, 分类, 可信度),假设检测到的目标数量为M;
**Step2:**通过某种方式将Step1中的检测结果与上一帧中的检测目标(假设上一帧检测目标数量为N)一一关联起来。换句话说,就是在M*N个Pair中找出最像似的Pair。
对于Step2中的“某种方式”,其实有多种方式可以实现目标的关联,比如常见的计算两帧中两个目标之间的欧几里得距离(平面两点之间的直线距离),距离最短就认为是同一个目标,然后通过匈牙利算法找出最匹配的Pair。当让,你还可以加上其他的判断条件,比如我用到的IOU,计算两个目标Box(位置大小方框)的交并比,该值越接近1就代表是同一个目标。还有其他的比如判断两个目标的外观是否相似,这就需要用到一种外观模型去做比较了,可能耗时更长。
在关联的过程中,会出现三种情况:
1)在上一帧中的N个目标中找到了本次检测到的目标,说明正常跟踪到了;
2)在上一帧中的N个目标中没有找到本次检测到的目标,说明这个目标是这一帧中新出现的,所以我们需要把它记录下来,用于下下一次的跟踪关联;
3)在上一帧中存在某个目标,这一帧中并没有与之关联的目标,那么说明该目标可能从视野中消失了,我们需要将其移除。(注意这里的可能,因为有可能由于检测误差,在这一帧中该目标并没有被检测到)
4.1 存在的问题
上面提到的跟踪方法在正常情况下都能够很好的工作,但是如果视频中目标运动得很快,前后两帧中同一个目标运动的距离很远,那么这种跟踪方式就会出现问题。
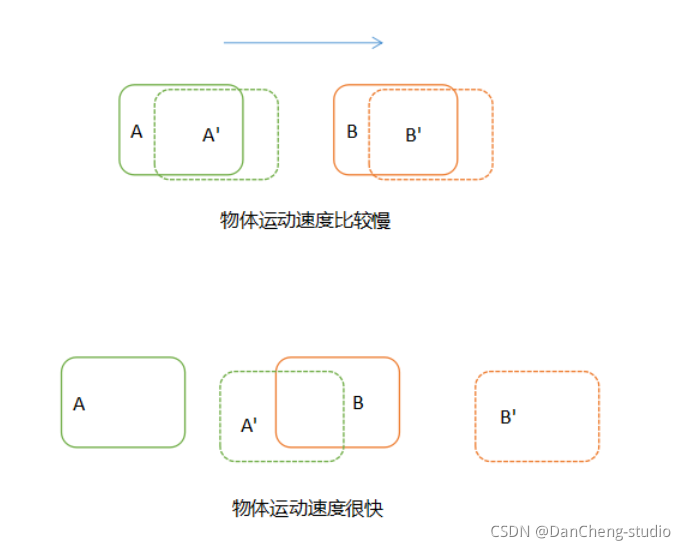
如上图,实线框表示目标在第一帧的位置,虚线框表示目标在第二帧的位置。当目标运行速度比较慢的时候,通过之前的跟踪方式可以很准确的关联(A, A’)和(B,
B’)。但是当目标运行速度很快(或者隔帧检测)时,在第二帧中,A就会运动到第一帧中B的位置,而B则运动到其他位置。这个时候使用上面的关联方法就会得到错误的结果。
那么怎样才能更加准确地进行跟踪呢?
4.2 基于轨迹预测的跟踪方式
既然通过第二帧的位置与第一帧的位置进行对比关联会出现误差,那么我们可以想办法在对比之前,先预测目标的下一帧会出现的位置,然后与该预测的位置来进行对比关联。这样的话,只要预测足够精确,那么几乎不会出现前面提到的由于速度太快而存在的误差

如上图,我们在对比关联之前,先预测出A和B在下一帧中的位置,然后再使用实际的检测位置与预测的位置进行对比关联,可以完美地解决上面提到的问题。理论上,不管目标速度多么快,都能关联上。那么问题来了,怎么预测目标在下一帧的位置?
方法有很多,可以使用卡尔曼滤波来根据目标前面几帧的轨迹来预测它下一帧的位置,还可以使用自己拟合出来的函数来预测下一帧的位置。实际过程中,我是使用拟合函数来预测目标在下一帧中的位置。
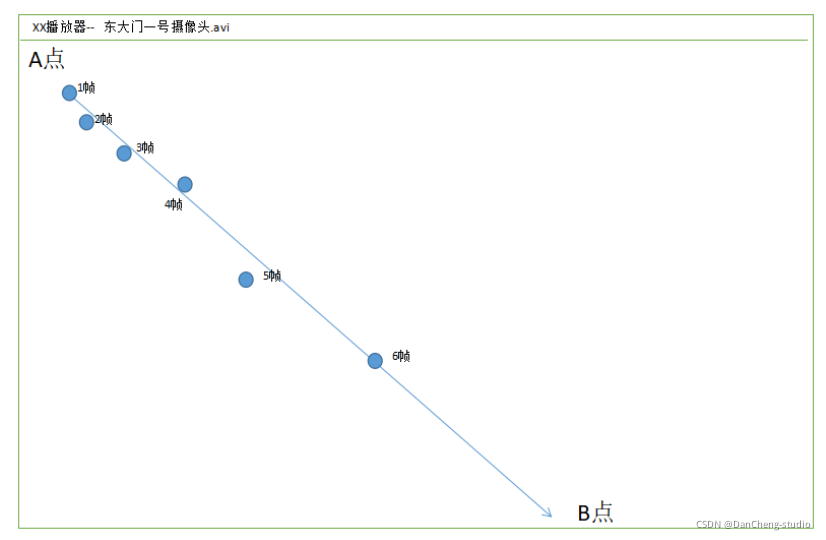
如上图,通过前面6帧的位置,我可以拟合出来一条(T->XY)的曲线(注意不是图中的直线),然后预测目标在T+1帧的位置。具体实现很简单,Python中的numpy库中有类似功能的方法。
5 训练代码
这里记录一下训练代码,来日更新
if FLAGS.mode == 'eager_tf':# Eager mode is great for debugging# Non eager graph mode is recommended for real trainingavg_loss = tf.keras.metrics.Mean('loss', dtype=tf.float32)avg_val_loss = tf.keras.metrics.Mean('val_loss', dtype=tf.float32)for epoch in range(1, FLAGS.epochs + 1):for batch, (images, labels) in enumerate(train_dataset):with tf.GradientTape() as tape:outputs = model(images, training=True)regularization_loss = tf.reduce_sum(model.losses)pred_loss = []for output, label, loss_fn in zip(outputs, labels, loss):pred_loss.append(loss_fn(label, output))total_loss = tf.reduce_sum(pred_loss) + regularization_lossgrads = tape.gradient(total_loss, model.trainable_variables)optimizer.apply_gradients(zip(grads, model.trainable_variables))logging.info("{}_train_{}, {}, {}".format(epoch, batch, total_loss.numpy(),list(map(lambda x: np.sum(x.numpy()), pred_loss))))avg_loss.update_state(total_loss)for batch, (images, labels) in enumerate(val_dataset):outputs = model(images)regularization_loss = tf.reduce_sum(model.losses)pred_loss = []for output, label, loss_fn in zip(outputs, labels, loss):pred_loss.append(loss_fn(label, output))total_loss = tf.reduce_sum(pred_loss) + regularization_losslogging.info("{}_val_{}, {}, {}".format(epoch, batch, total_loss.numpy(),list(map(lambda x: np.sum(x.numpy()), pred_loss))))avg_val_loss.update_state(total_loss)logging.info("{}, train: {}, val: {}".format(epoch,avg_loss.result().numpy(),avg_val_loss.result().numpy()))avg_loss.reset_states()avg_val_loss.reset_states()model.save_weights('checkpoints/yolov3_train_{}.tf'.format(epoch))
6 最后
🧿 更多资料, 项目分享:
https://gitee.com/dancheng-senior/postgraduate
相关文章:
计算机设计大赛 深度学习的视频多目标跟踪实现
文章目录 1 前言2 先上成果3 多目标跟踪的两种方法3.1 方法13.2 方法2 4 Tracking By Detecting的跟踪过程4.1 存在的问题4.2 基于轨迹预测的跟踪方式 5 训练代码6 最后 1 前言 🔥 优质竞赛项目系列,今天要分享的是 基于深度学习的视频多目标跟踪实现 …...

高性能JSON框架之FastJson的简单使用
高性能JSON框架之FastJson的简单使用、 1.前言 1.1.FastJson的介绍: JSON协议使用方便,越来越流行,JSON的处理器有很多,这里我介绍一下FastJson,FastJson是阿里的开源框架,被不少企业使用,是一个极其优秀的Json框架,Github地址: FastJson 1.2.FastJson的特点: 1.F…...
)
★判断素数的几种方法(由易到难,由慢到快)
素数的定义: 素数,又称为质数,指的是“大于1的整数中,只能被1和这个数本身整除的数”。换句话说,素数是只有两个正约数(1和本身)的自然数。素数在数论中有着重要的地位,且素数的个数…...

vue svelte solid 虚拟滚动性能对比
前言 由于svelte solid 两大无虚拟DOM框架,由于其性能好,在前端越来越有影响力。 因此本次想要验证,这三个框架关于实现表格虚拟滚动的性能。 比较版本 vue3.4.21svelte4.2.12solid-js1.8.15 比较代码 这里使用了我的 stk-table-vue(np…...
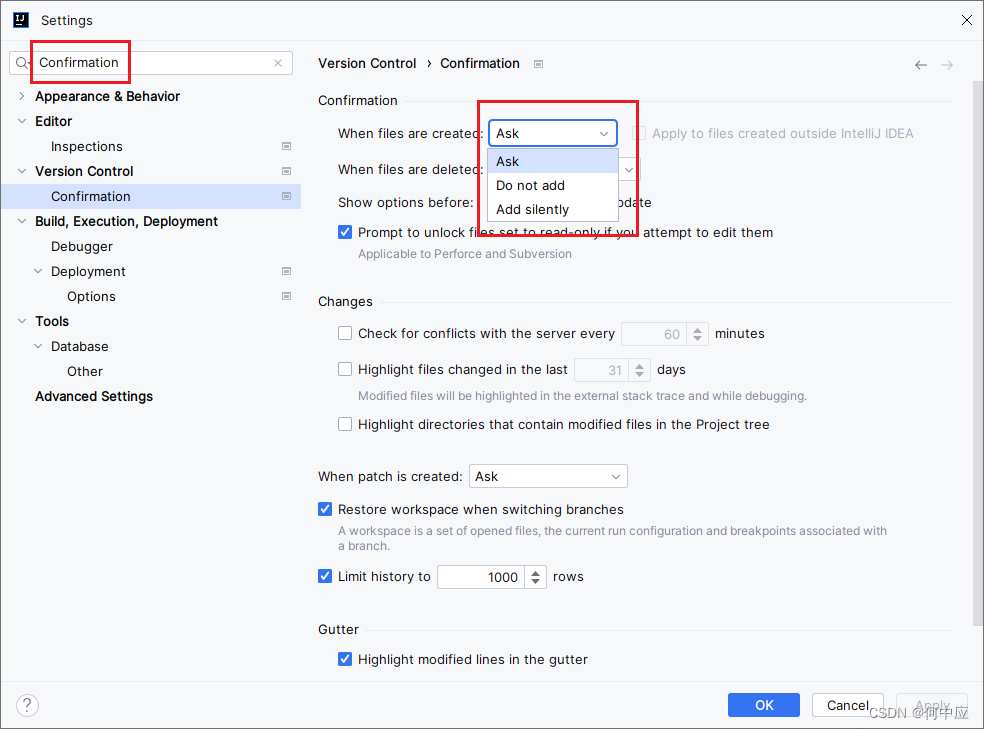
IDEA中新增文件,弹出框提示是否添加到Git点错了,怎么重新设置?
打开一个配置了Git的项目,新增一个文件,会弹出下面这个框。提示是否将新增的文件交给Git管理。 一般来说,会选择ADD,并勾选Dont ask agin,添加并不再询问。如果不小心点错了,可在IDEA中重新设置(…...

LV15 day5 字符设备驱动读写操作实现
一、读操作实现 ssize_t xxx_read(struct file *filp, char __user *pbuf, size_t count, loff_t *ppos); 完成功能:读取设备产生的数据 参数: filp:指向open产生的struct file类型的对象,表示本次read对应的那次open pbuf&#…...
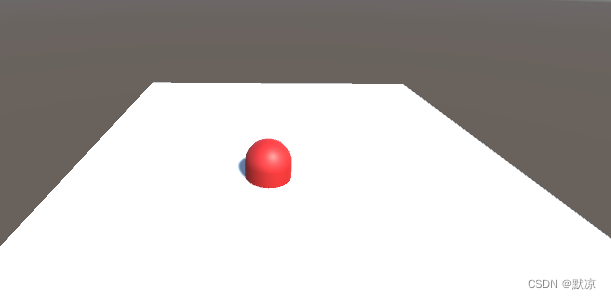
Uninty 鼠标点击(摄像机发出射线-检测位置)
平面来触发碰撞,胶囊用红色材质方便观察。 脚本挂载到胶囊上方便操作。 目前实现的功能,鼠标左键点击,胶囊就移动到那个位置上。 using System.Collections; using System.Collections.Generic; using UnityEngine;public class c6 : MonoBe…...

描述下Vue自定义指令
描述下Vue自定义指令 (1)自定义指令基本内容(2)使用场景(3)使用案例 在 Vue2.0 中,代码复用和抽象的主要形式是组件。然而,有的情况下,你仍然需要对普通 DOM 元素进行底层…...

2024.3.7
作业: 1、OSI的七层网络模型有哪些,每一层有什么作用? (1)应用层 负责处理不同应用程序之间的通信,需要满足提供的协议,确保数据发送方和接收方的正确 (2)表示层…...

this.$watch 侦听器 和 停止侦听器
使用组件实例的$watch()方法来命令式地创建一个侦听器; 它还允许你提前停止该侦听器 语法:this.$watch(data, method, object) 1. data:侦听的数据源,类型为String 2. method:回调函数&#x…...

P1030 [NOIP2001 普及组] 求先序排列题解
题目 给出一棵二叉树的中序与后序排列。求出它的先序排列。(约定树结点用不同的大写字母表示,且二叉树的节点个数≤8)。 输入输出格式 输入格式 共两行,均为大写字母组成的字符串,表示一棵二叉树的中序与后序排列。…...

【分布式】NCCL Split Tree kernel内实现情况 - 06
相关系列 【分布式】NCCL部署与测试 - 01 【分布式】入门级NCCL多机并行实践 - 02 【分布式】小白看Ring算法 - 03 【分布式】大模型分布式训练入门与实践 - 04 目录 相关系列概述1.1 Tree1.2 double binary tree初始化和拓扑2.1 Tree的初始化与差异2.2 ncclGetBtreeKernel内部…...
)
C语言深入学习 --- 4.自定义类型(结构体+枚举+联合)
第四章 自定义类型:结构体,枚举,联合 结构体 结构体类型的声明 结构的自引用 结构体变量的定义和初始化 结构体的内存对齐 结构体实现位段(位段的填充 和 可移植性) 枚举 枚举类型的定义 枚举的优点 枚举的使…...

AI自然语言中默认上下文长度4K 几K是什么意思?
环境: 4K 问题描述: AI自然语言中默认上下文长度4K 几K是什么意思? 解决方案: 在自然语言处理中,“k” 表示 “千”,是一种简写方式。当我们说 “4k” 时,实际上指的是 “4,000”。在上下文…...

vSphere 8考试认证题库 2024最新(VCP 8.0版本)
VMware VCP-DCV(2V0-21.23)认证考试题库,已全部更新,答案已经完成校对,完整题库请扫描上方二维码访问。正常考可以考到450分以上(满分500分,300分通过) An administrator is tasked …...

系统学习Python——装饰器:“私有“和“公有“属性案例-[装饰器参数、状态保持和外层作用域]
分类目录:《系统学习Python》总目录 文章《系统学习Python——装饰器:“私有“和“公有“属性案例-[实现私有属性]》中使用的类装饰器接受任意多个参数来命名私有属性。然而真正发生的情况是,参数传递给了Private函数,然后Private…...
星辰天合参与编制 国内首个可兼顾 AI 大模型训练的高性能计算存储标准正式发布
近日,在中国电子工业标准化技术协会高标委的支持和指导下,XSKY星辰天合作为核心成员参与编制的《高性能计算分布式存储系统技术要求》团体标准,在中国电子工业标准化技术协会网站正式发布。 该团体标准强调了分布式存储系统对包括传统高性能计…...

算法训练day38动态规划基础Leetcode509斐波纳切数70爬楼梯746使用最小花费爬楼梯
什么是动态规划 对于动态规划问题,我将拆解为如下五步曲,这五步都搞清楚了,才能说把动态规划真的掌握了! 确定dp数组(dp table)以及下标的含义确定递推公式dp数组如何初始化确定遍历顺序举例推导dp数组&a…...
Leetcode 206. 反转链表
给你单链表的头节点 head ,请你反转链表,并返回反转后的链表。 示例 1: 输入:head [1,2,3,4,5] 输出:[5,4,3,2,1] 示例 2: 输入:head [1,2] 输出:[2,1] 示例 3: 输…...
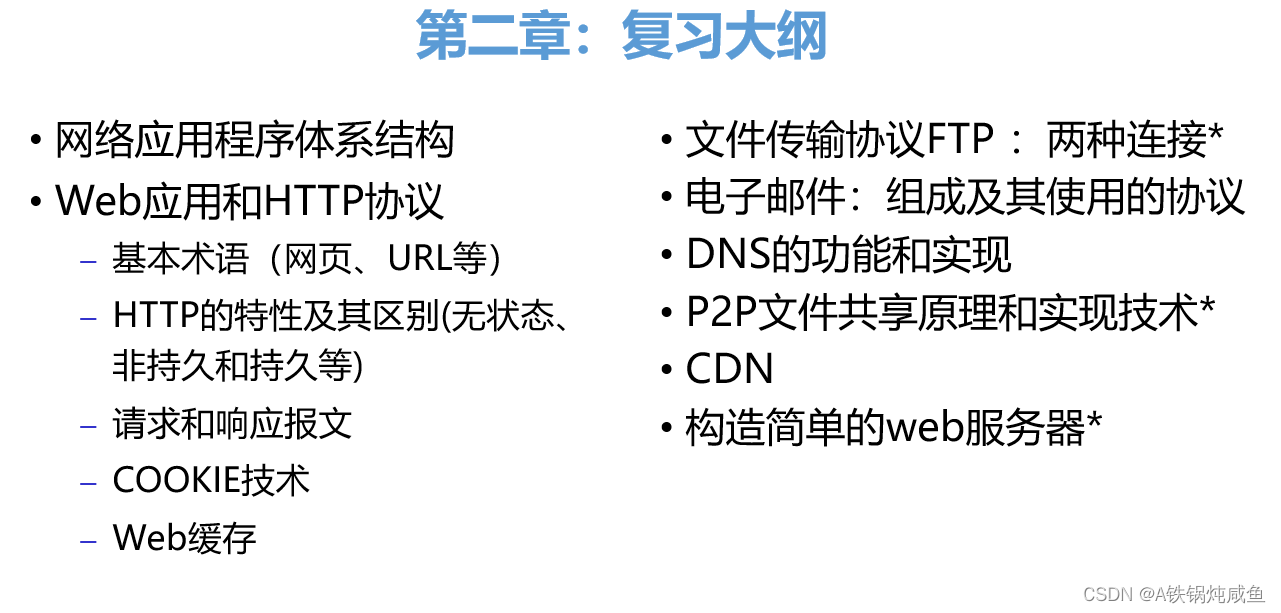
电子科技大学课程《计算机网络系统》(持续更新)
前言 本校的课程课时有所缩减,因此可能出现与你学习的课程有所减少的情况,因此对其他学校的同学更多的作为参考作用。本文章适合学生的期中期末考试,以及想要考研电子科技大学的同学,电子科技大学同学请先看附言。 第一章 计算…...

一文说清:穿透式监管体系、穿透式监管平台、穿透式监管模型
最近这段时间,和不少央国企的财务、风控负责人交流,话题总绕不开穿透式监管。大家共识很强:穿透式监管必须做,也不得不做。穿透式监管建设本身,横跨了三个专业壁垒很高的领域:公司治理与风险管理、企业数字…...

IDE扩展管理套件:实现配置即代码与团队环境同步
1. 项目概述:一个为开发者定制的IDE扩展管理套件如果你和我一样,每天的工作都离不开各种集成开发环境(IDE),比如 Visual Studio Code、IntelliJ IDEA 或者 PyCharm,那你一定对“扩展”或“插件”又爱又恨。…...

[技术解析]图卷积网络在半监督节点分类中的实战与优化
1. 图卷积网络入门:从传统CNN到GCN的思维跃迁 第一次接触图卷积网络(GCN)时,我习惯性地用传统CNN的思维去理解它,结果踩了不少坑。传统卷积在规整的网格数据上滑动滤波器的操作,在图数据中完全行不通——因为图的拓扑结构是不规则…...

关于光缆,这些事儿通信人一定要知道
随着5G网络的全面铺开和持续深耕,通信工程师的工作边界正在不断拓展。过去,后台网优工程师可能更多地专注于参数调整、信令分析和性能优化;而如今,越来越多的项目要求前后台协同作业,网优人员也需要熟悉现场施工规范&a…...

【Qt串口实战】硬件升级后readyRead信号丢失的排查与修复
1. 问题现象:硬件升级后readyRead信号神秘消失 那天早上刚到公司,硬件组的同事兴冲冲地跑过来告诉我:"老王,我们给设备升级了最新固件,性能提升30%!"我心想这是好事啊,结果打开调试软…...
)
Jetson TX2 NX扩容实战:用M.2固态硬盘告别存储焦虑(附完整分区与挂载命令)
Jetson TX2 NX存储扩容终极指南:M.2固态硬盘实战与性能调优 当你在Jetson TX2 NX上部署YOLOv5模型时,突然发现eMMC存储空间不足——这个场景对于许多边缘计算开发者来说再熟悉不过。16GB或32GB的板载存储,在当今动辄几个GB的AI模型和数据集面…...

计算机 AI 方向 SCI 推荐|AI / 计算机 SCI 清单:3本 2区 + 1本 3区保底,无预警、对国人极度友好,易中稿,录用率拉满好投稿,硕博 / 青年教师首选,AI 科研人必藏!
投稿实用建议(CSDN科研人专属)优先选刊:追求高影响力、评职首选「Applied Soft Computing」;追求高录用率、快速毕业首选「Neurocomputing」。避坑提醒:所有期刊均为非预警刊,自引率均在安全范围࿰…...

AI写教材新突破!低查重工具,快速生成完整教材框架与内容!
教材编写困境与 AI 工具的破局之道 很多教材编写者常常感到困扰:尽管他们在正文内容上付出了大量心血,但由于缺乏配套资源,最终的教学效果难以理想化。设计课后练习时,缺乏新颖的题型构思;想制作直观的教学课件&#…...

Win11Debloat免费工具:3步彻底清理Windows 11垃圾,性能提升51%
Win11Debloat免费工具:3步彻底清理Windows 11垃圾,性能提升51% 【免费下载链接】Win11Debloat A simple, lightweight PowerShell script that allows you to remove pre-installed apps, disable telemetry, as well as perform various other changes …...

NoFences:Windows桌面分区终极免费解决方案
NoFences:Windows桌面分区终极免费解决方案 【免费下载链接】NoFences 🚧 Open Source Stardock Fences alternative 项目地址: https://gitcode.com/gh_mirrors/no/NoFences 在Windows系统中,桌面图标管理一直是用户面临的常见挑战。…...