TI IWR6843ISK ROS驱动程序搭建
1、设备准备
1.1 硬件设备
1)TI IWR 6843 ISK 1块
2)Micro USB 数据线 1条
1.2 系统环境
1)VMware Workstation 15 Player 虚拟机
2)Ubuntu18.04 并安装有 ROS1 系统
如若没有安装 ROS 系统,可通过如下指令进行一键安装 ROS 系统,安装过程中一直选择“1”便可安装 Ubuntu 18.04 对应用的 melodic ROS 系统。使用一键安装可以省去很多的时间来安装 ROS系统。
wget http://fishros.com/install -O fishros && . fishros2、准备工作
2.1 添加用户权限
您的用户帐户必须是“dialout”unix 组的成员,才能访问 Linux 上的串行端口。要检查您是否是此组的成员,请运行“groups”命令。如果您已经是“dialout”组的成员,则输出应列出“dialout”(以及其他组)。如果您不是“dialout”组的成员,请运行以下命令将您的用户帐户添加到该组。
# <your_username>:这里替换为自己的Ubuntu系统的用户名系统即可,我的是ubuntu18
sudo adduser <your_username> dialout
然后再重启 Ubuntu18.04 系统以生效刚刚的这一步操作。
2.2 构建 TI 毫米波 ROS1 驱动
1)从TI官网下载驱动程序,链接如下:
https://git.ti.com/cgit/mmwave_radar/mmwave_ti_ros/commit/下图中框选的即为TI官方提供的ROS驱动程序,点击对应的格式下载即可,我这里下载的是“mmwave_ti_ros-master.zip”文件。
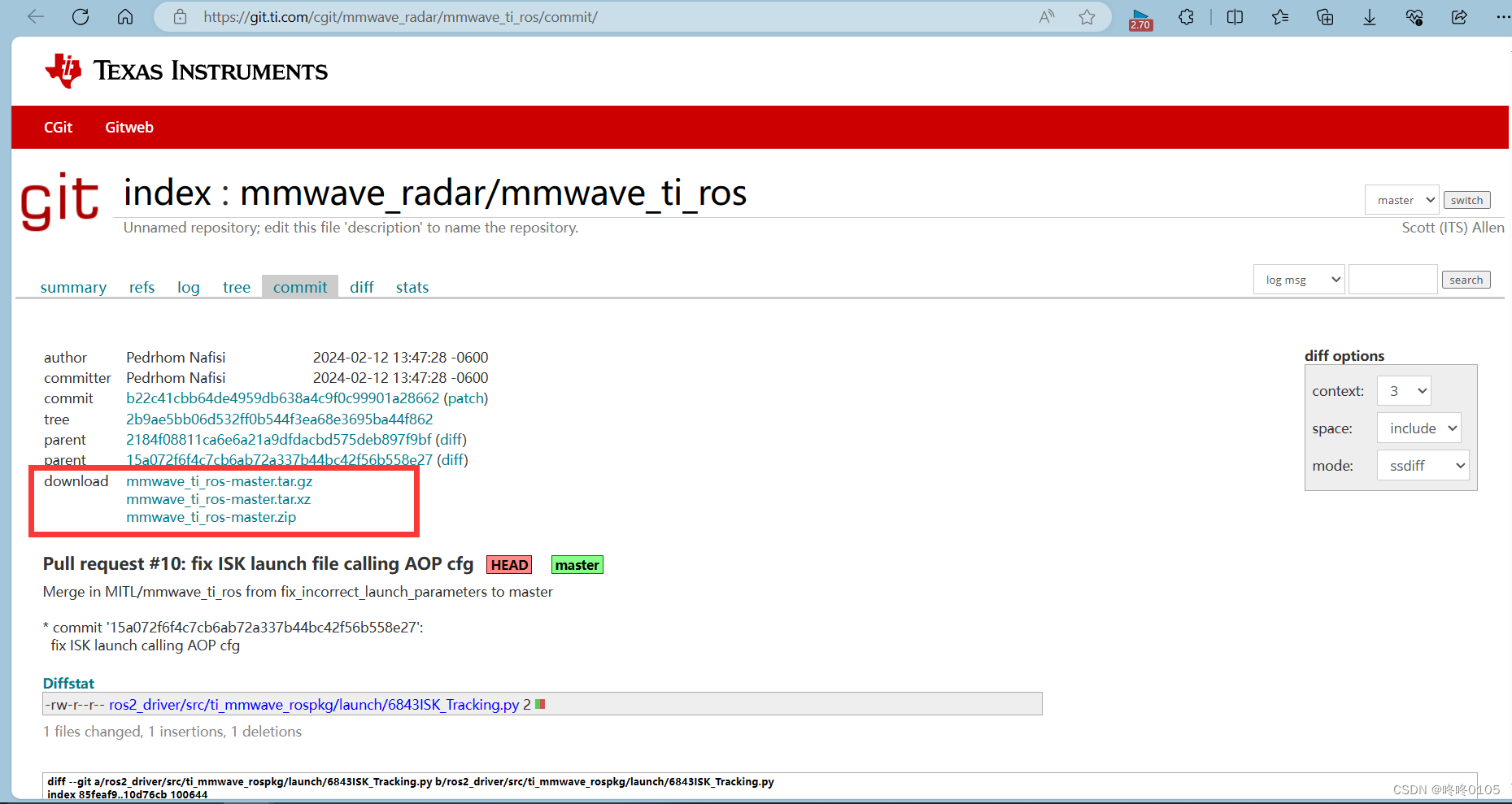
在 Ubuntu 系统中解压“mmwave_ti_ros-master.zip”文件只需要使用鼠标选中右击点击“解压到此处”,即可将此压缩包解压出来。
2)TI 毫米波雷达 ROS 驱动构建
# 在解压的 mmwave_ti_ros 文件夹下,我解压在主目录中
# 进入ros1_driver文件下
cd mmwave_ti_ros/ros1_driver/# 编译程序
catkin_make3)添加 source 路径
# 在 .bashrc 文件中添加所编的 mmwave_ti_ros的路径# 使用如下指令打开 .bashrc 文件
gedit .bashrc然后在 .bashrc 文件中添加自己的 mmwave_ti_ros的路径,这样就避免每次启动终端都需source的指令,我的路径为/home/ubuntu18/mmwave_ti_ros/ros1_driver/devel/setup.bash
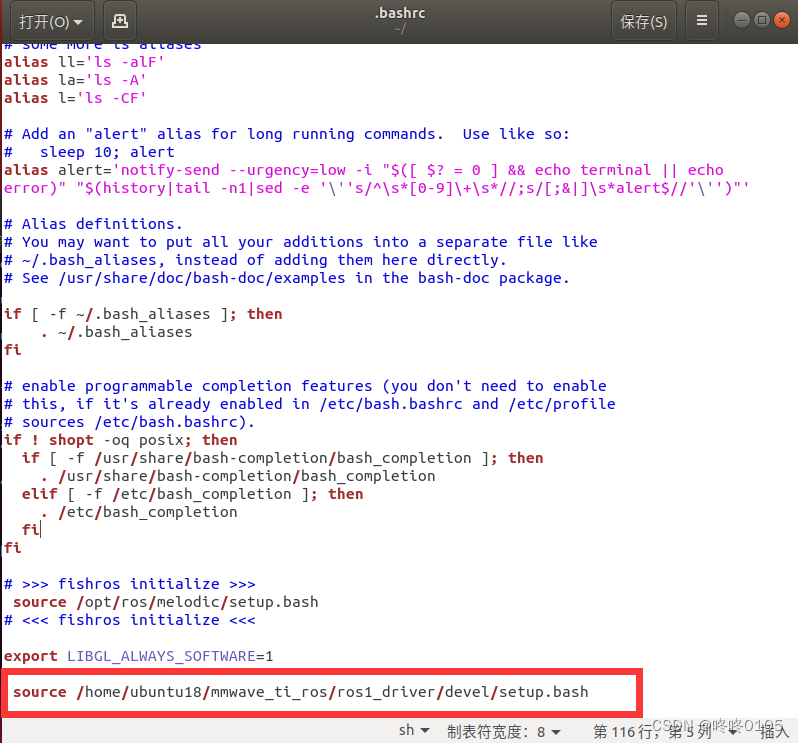
按照图中所示的方式添加source路径即可。
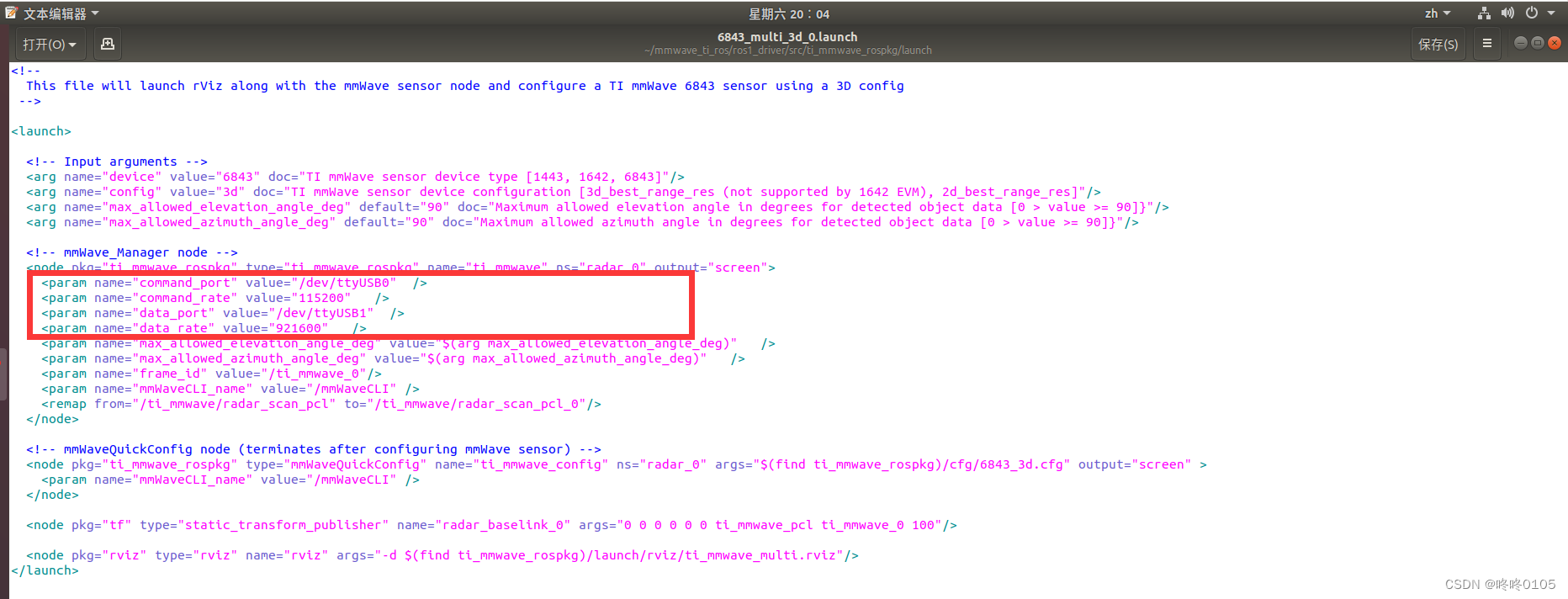
3)将 IWR6843ISK 毫米波雷达板子接入电脑,选择接入到Ubuntu18.04系统中,然后使用如下指令查看接入的 IWR6843ISK 毫米波雷达板子的接口号
ll /dev/serial/by-id
可在上图中看到的我的接口号为“../../ttyUSB0”和“../../ttyUSB1”,然后在/home/ubuntu18/mmwave_ti_ros/ros1_driver/src/ti_mmwave_rospkg/launch中找到IWR6843ISK对应的launch文件打开将其接口号修改为所查询出来的接口号,我这里修改的launch文件是6843_mulit_3d_0.launch文件,其他的文件也是类似的修改方式。修改完成后保存并关闭此launch文件。
3、启动 launch 验证是否成功
运行上述所修改的 launch 文件,也可以启动其他的文件,只需要将其接口更改为自己的板子对应的接口即可。
打开一个新终端运行以下指令,即可在所打开的 RVIZ 中看到 IWR6843ISK 毫米波雷达板子所产生的点云数据。
roslaunch ti_mmwave_rospkg 6843_multi_3d_0.launch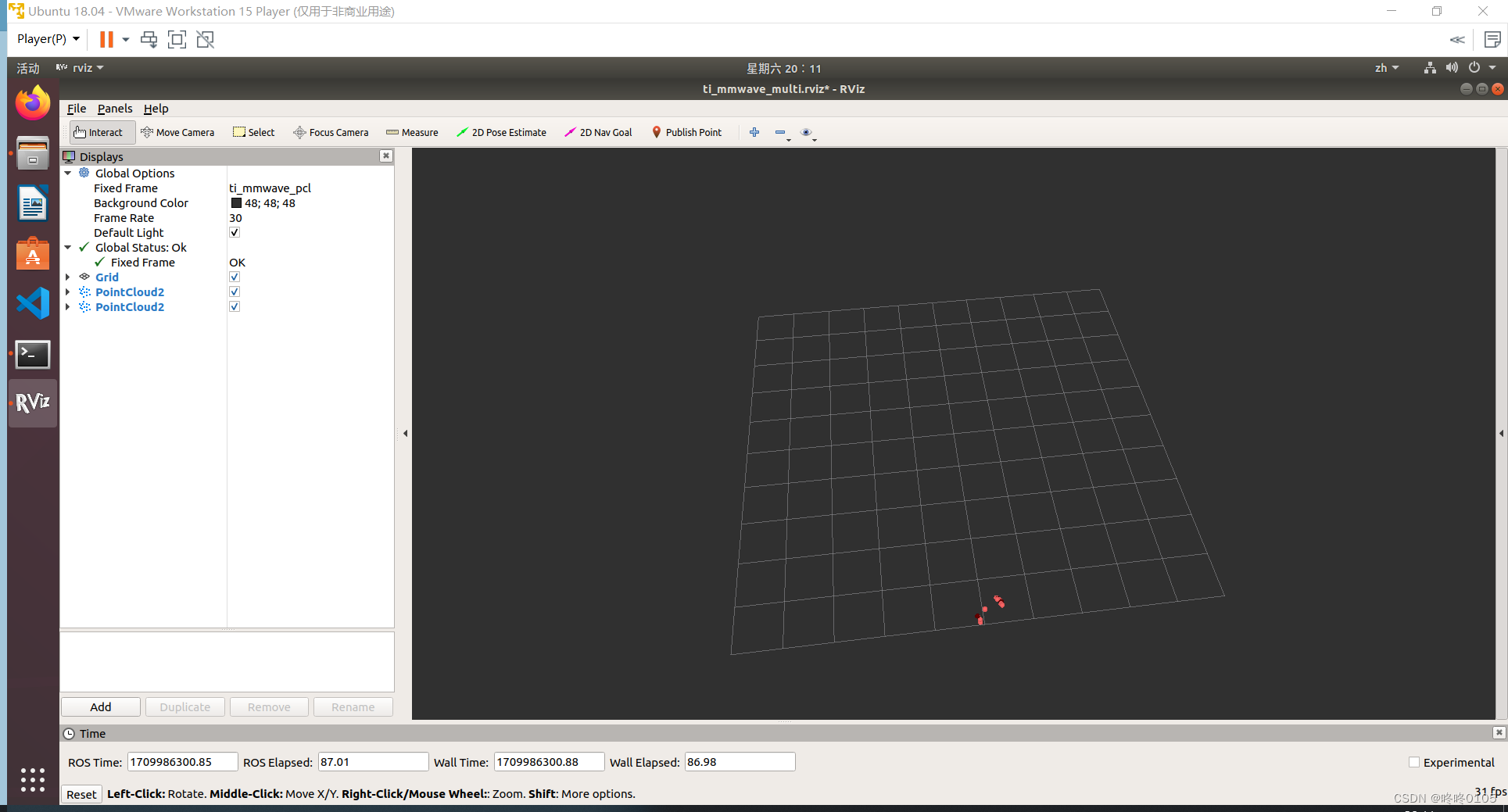
至此,这说明所安装的 TI 的毫米波雷达板子驱动程序安装成功。
参考链接:
小鱼的一键安装系列 | 鱼香ROS
https://dev.ti.com/tirex/explore/node?node=A__ANSECEN8pUpQyDw4PbR9XQ__radar_toolbox__1AslXXD__LATEST
相关文章:
TI IWR6843ISK ROS驱动程序搭建
1、设备准备 1.1 硬件设备 1)TI IWR 6843 ISK 1块 2)Micro USB 数据线 1条 1.2 系统环境 1)VMware Workstation 15 Player 虚拟机 2)Ubuntu18.04 并安装有 ROS1 系统 如若没有安装 ROS 系统,可通过如下指令进行…...
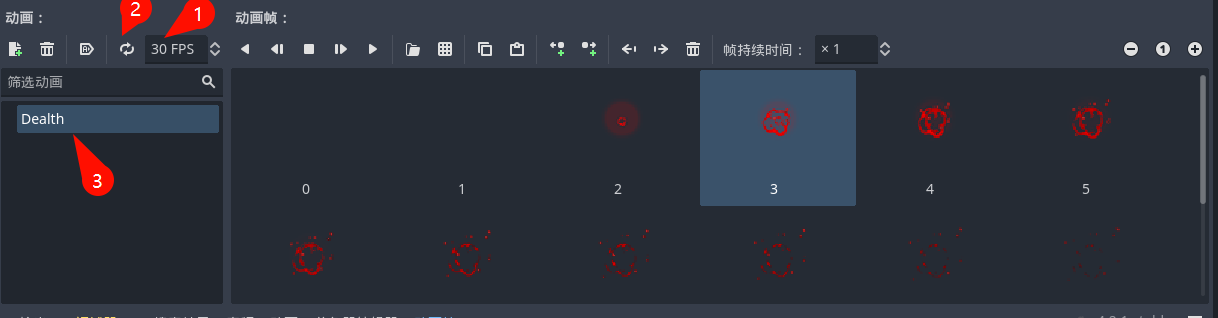
【Godot4自学手册】第二十节增加游戏的打击感,镜头震颤、冻结帧和死亡特效
这节我主要学习增加游戏的打击感。我们通过镜头震颤、冻结帧、增加攻击点特效,增加死亡。开始了。 一、添加攻击点特效 增加攻击点特效就是,在攻击敌人时,会在敌人受击点显示一个受击动画。 1.添加动画。 第一步先做个受击点动画。切换到…...

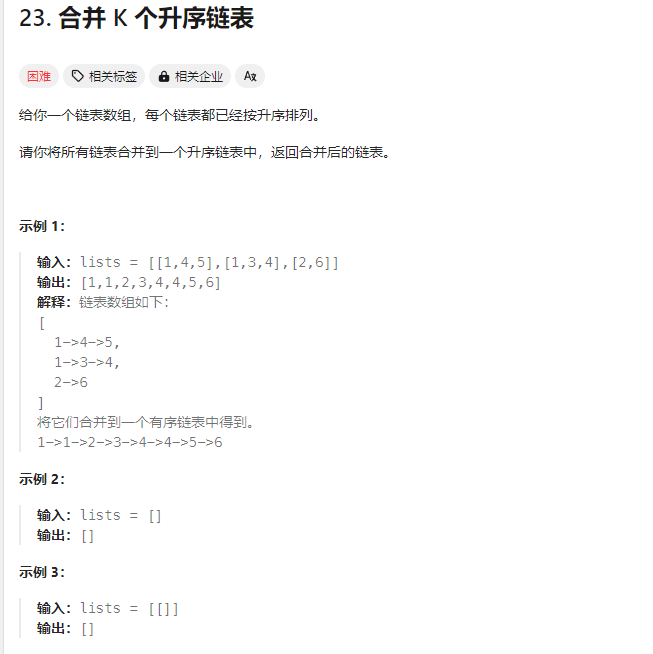
[论文笔记] Open-Sora 1、sora复现方案概览
GitHub - hpcaitech/Open-Sora: Unofficial implementation of OpenAIs Sora Open-Sora已涵盖: 提供完整的Sora复现架构方案,包含从数据处理到训练推理全流程。 支持动态分辨率,训练时可直接训练任意分辨率的视频,无需进行缩放。 支持多种模型结构。由于Sora实际模型结构未…...

持续更新 | 与您分享 Flutter 2024 年路线图
作者 / Michael Thomsen Flutter 是一个拥有繁荣社区的开源项目,我们致力于确保我们的计划公开透明,并将毫无隐瞒地分享从问题到设计规范的所有内容。我们了解到许多开发者对 Flutter 的功能路线图很感兴趣。我们往往会在一年中不断更改并调整这些计划&a…...
Go语言数据结构(二)堆/优先队列
文章目录 1. container中定义的heap2. heap的使用示例3. 刷lc应用堆的示例 更多内容以及其他Go常用数据结构的实现在这里,感谢Star:https://github.com/acezsq/Data_Structure_Golang 1. container中定义的heap 在golang中的"container/heap"…...
)
NERF论文笔记(1/2)
NeRF:Representing Scene as Neural Radiance Fields for View Synthesis 笔记 摘要 实现了一个任意视角视图生成算法:输入稀疏的场景图像,通过优化连续的Volumetric场景函数实现;用全连接深度网络表达场景,输入是一个连续的5维…...

深入理解nginx一致性哈希负载均衡模块[上]
1. 引言 在现代的网络应用中,负载均衡是一个至关重要的组件。它能够分配流量到多个服务器上,实现高可用性和性能扩展。Nginx是一个广泛使用的高性能Web服务器和反向代理服务器,其负载均衡模块提供了多种算法来实现流量的分发。其中࿰…...

【Linux】Docker安装
卸载旧版Docker 新版docker无法覆盖旧版的,所以需要先卸载原来的旧版本 yum remove docker \docker-client \docker-client-latest \docker-common \docker-latest \docker-latest-logrotate \docker-logrotate \docker-selinux \docker-engine-selinux \docker-eng…...

动态SLAM论文阅读笔记
近期阅读了许多动态SLAM相关的论文,它们基本都是基于ORB-SLAM算法,下面简单记录一下它们的主要特点: 1.DynaSLAM 采用CNN网络进行分割多视图几何辅助的方式来判断动态点,并进行了背景修复工作。 2.Detect-SLAM 实时性问题&…...

数据挖掘:航空公司的客户价值分析
需求分析 理解并掌握聚类分析方法,掌握数据的标准化,掌握寻找最佳聚类数,掌握聚类的绘图,掌握聚类分析的应用场景。 系统实现 实验流程分析 借助航空公司数据,对客户进行分类对不同类别的客户进行特征分析…...

GIS之深度学习08:安装GPU环境下的pytorch
环境: cuda:12.1.1 cudnn:12.x pytorch:2.2.0 torchvision:0.17.0 Python:3.8 操作系统:win (本文安装一半才发现pytorch与cuda未对应,重新安装了cuda后才开始的&a…...

防患未然,OceanBase巡检工具应用实践——《OceanBase诊断系列》之五
1. OceanBase为什么要做巡检功能 尽管OceanBase拥有很好的MySQL兼容性,但在长期的生产环境中,部署不符合标准规范、硬件支持异常,或配置项错误等问题,这些短期不会出现的问题,仍会对数据库集群构成潜在的巨大风险。为…...
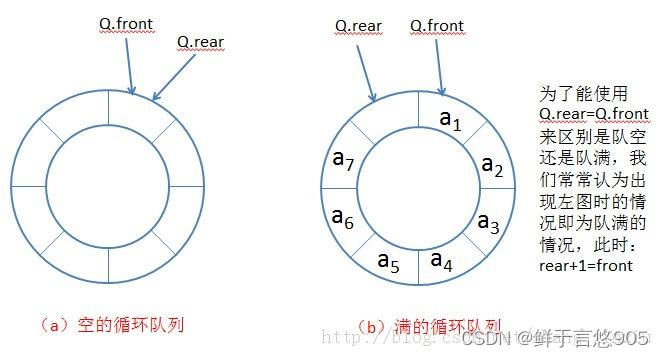
数据结构从入门到精通——队列
队列 前言一、队列1.1队列的概念及结构1.2队列的实现1.3队列的实现1.4扩展 二、队列面试题三、队列的具体实现代码Queue.hQueue.ctest.c队列的初始化队列的销毁入队列出队列返回队头元素返回队尾元素检测队列是否为空检测元素个数 前言 队列是一种特殊的线性数据结构ÿ…...
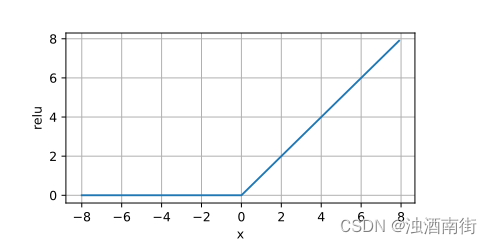
深度学习相关概念及术语总结
目录 1.CNN2.RNN3.LSTM4.NLP5.CV6.正向传播7.反向传播8.sigmoid 函数9.ReLU函数10.假设函数11.损失函数12.代价函数 1.CNN CNN 是卷积神经网络(Convolutional Neural Network)的缩写。卷积神经网络是一种深度学习模型,专门用于处理具有网格状…...
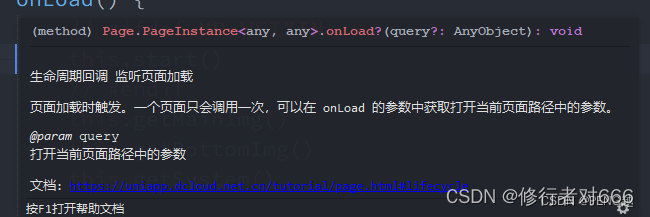
uniapp发行H5获取当前页面query
阅读uni的文档大致可得通过 onLoad与 onShow()的形参都能获取页面传递的参数,例如在开发时鼠标移动到方法上可以看到此方法的简短介绍 实际这里说的是打开当前页面的参数,在小程序端的时候测试并无问题,但是发行到H5时首页加载会造成参数获取…...

Flutter中动画的实现
动画三要素 控制动画的三要素:Animation、Tween、和AnmaitionController Animation: 产生的值的序列,有CurveAnimation等子类,, 可以将值赋值给Widget的宽高或其他属性,进而控制widget发生变化 Tween&#…...
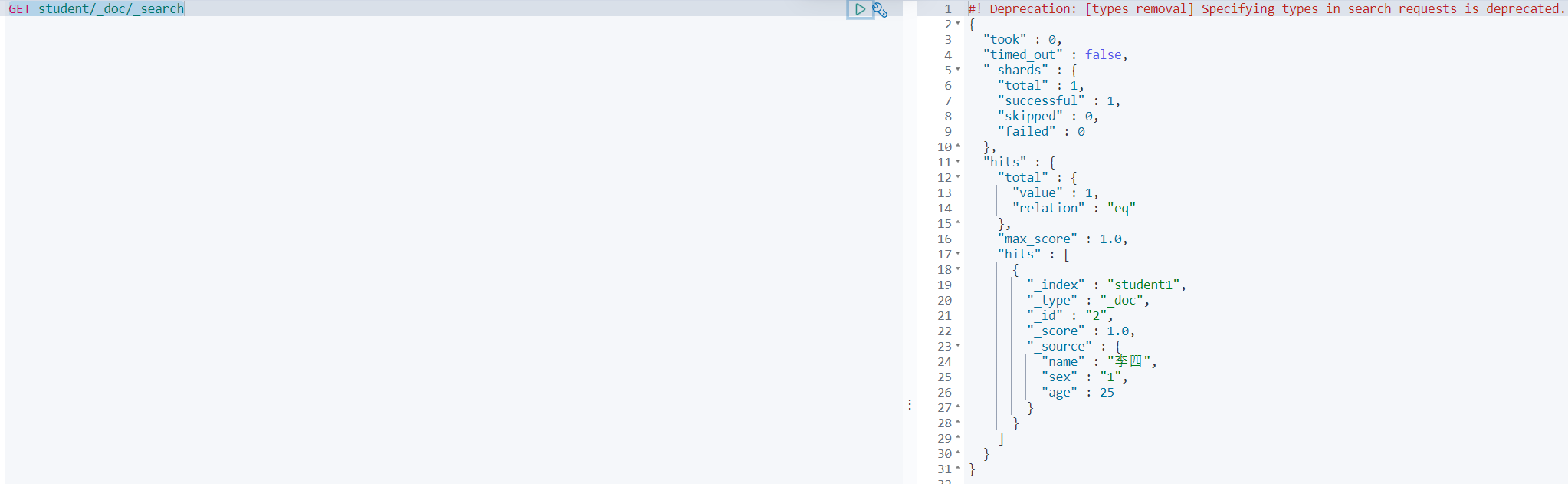
Elasticsearch从入门到精通-03基本语法学习
Elasticsearch从入门到精通-03基本语法学习 👏作者简介:大家好,我是程序员行走的鱼 📖 本篇主要介绍和大家一块学习一下ES基本语法,主要包括索引管理、文档管理、映射管理等内容 1.1 了解Restful ES对数据进行增、删、改、查是以…...
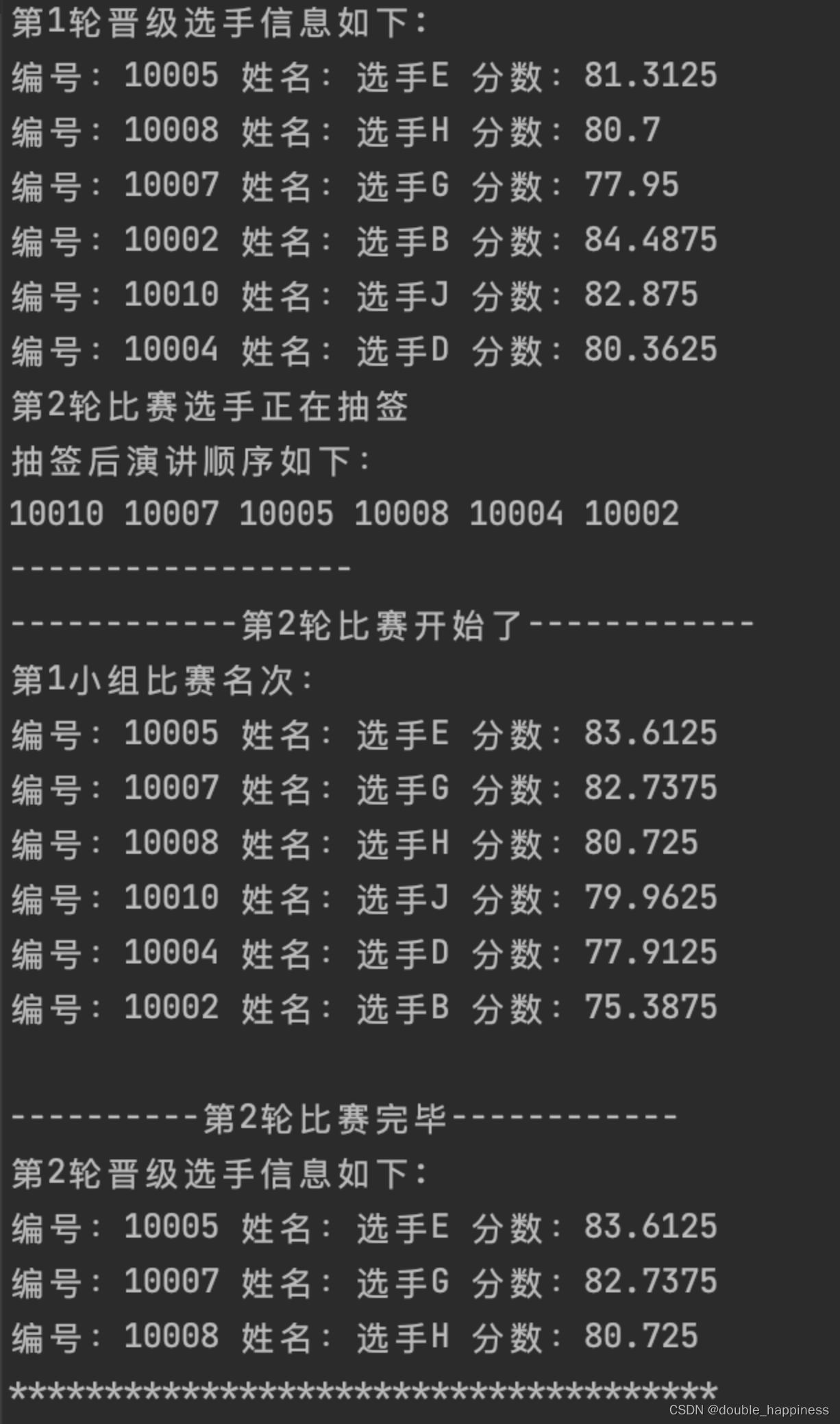
【黑马程序员】STL实战--演讲比赛管理系统
文章目录 演讲比赛管理系统需求说明比赛规则程序功能 创建管理类功能描述创建演讲比赛管理类 菜单功能添加菜单成员函数声明菜单成员函数实现菜单功能测试 退出功能添加退出功能声明退出成员函数实现退出功能测试 演讲比赛功能功能分析创建选手类比赛成员属性添加初始化属性创建…...
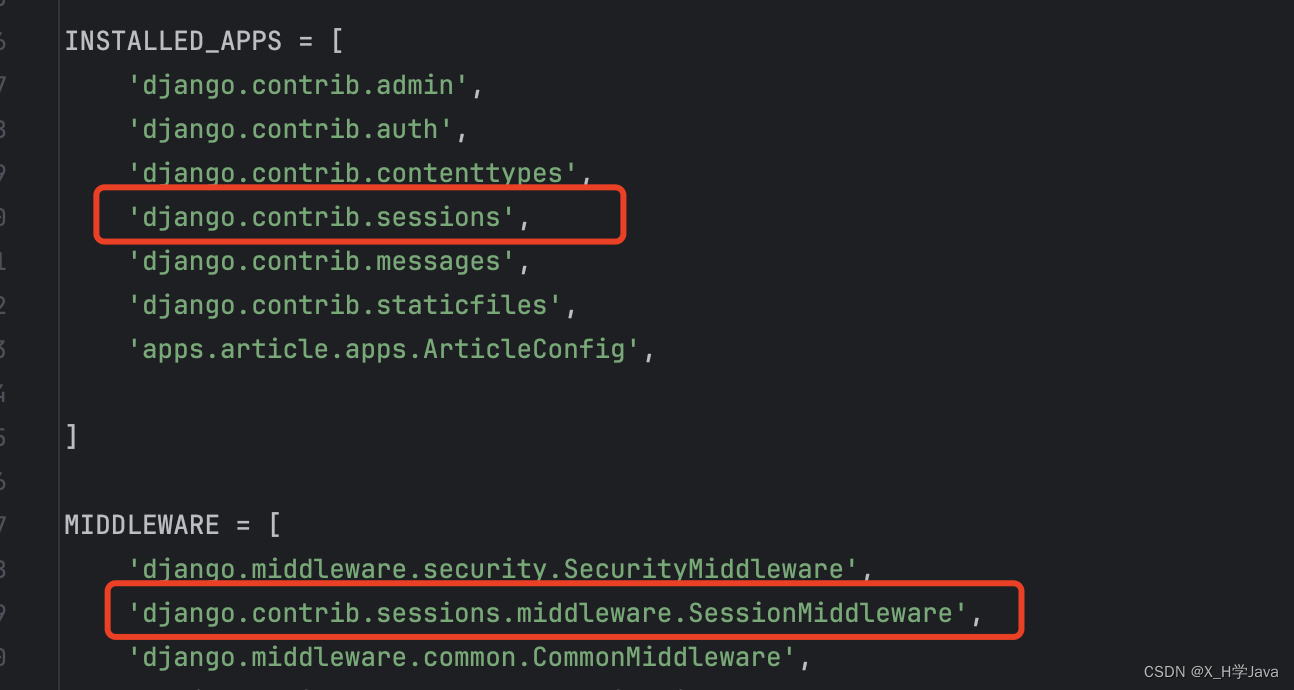
一文帮助快速入门Django
文章目录 创建django项目应用app配置pycharm虚拟环境打包依赖 路由传统路由include路由分发namenamespace 视图中间件orm关系对象映射操作表数据库配置model常见字段及参数orm基本操作 cookie和sessiondemo类视图 创建django项目 指定版本安装django:pip install dj…...
基于springboot实现图书推荐系统项目【项目源码+论文说明】计算机毕业设计
基于springboot实现图书馆推荐系统演示 摘要 时代的变化速度实在超出人类的所料,21世纪,计算机已经发展到各行各业,各个地区,它的载体媒介-计算机,大众称之为的电脑,是一种特高速的科学仪器,比…...

技术社区参与
技术社区参与:开发者成长的加速器 在数字化浪潮中,技术社区已成为开发者学习、协作与创新的核心平台。无论是开源项目的贡献,还是技术难题的讨论,社区为从业者提供了资源共享与经验沉淀的舞台。参与技术社区不仅能拓展专业视野&a…...
YOLOv12模型结构详解:深入理解Transformer在目标检测中的应用
YOLOv12模型结构详解:深入理解Transformer在目标检测中的应用 1. 引言 如果你用过YOLO系列模型做目标检测,可能会发现一个有趣的现象:早期的YOLO模型,比如YOLOv3、YOLOv4,在检测一些特别小的物体,或者被遮…...

泉盛UV-K5/K6终极自定义固件指南:解锁专业对讲机的隐藏潜能
泉盛UV-K5/K6终极自定义固件指南:解锁专业对讲机的隐藏潜能 【免费下载链接】uv-k5-firmware-custom 全功能泉盛UV-K5/K6固件 Quansheng UV-K5/K6 Firmware 项目地址: https://gitcode.com/gh_mirrors/uvk5f/uv-k5-firmware-custom 你是否曾觉得手中的泉盛UV…...

PostgreSQL MVCC 深度解析
PostgreSQL MVCC 深度解析 摘要: 本文通过每条元组头部的 t_xmin 和 t_xmax 字段,解释 PostgreSQL 的多版本并发控制(Multi-Version Concurrency Control)在存储层的工作原理。展示了快照如何在并发会话之间确定可见性࿰…...
)
AGI产品上市前最后72小时必做3项法律验证——2026奇点大会认证流程全图解(含官方模板下载密钥)
第一章:2026奇点智能技术大会:AGI的法律框架 2026奇点智能技术大会(https://ml-summit.org) 全球首部AGI权责白皮书发布 大会正式发布《通用人工智能系统责任归属与治理原则白皮书(2026)》,确立“开发者—部署者—使…...

从零开始掌握编程:游戏化学习平台的终极指南 [特殊字符]
从零开始掌握编程:游戏化学习平台的终极指南 🎮 【免费下载链接】codecombat Game for learning how to code. 项目地址: https://gitcode.com/gh_mirrors/co/codecombat 还在为枯燥的编程语法而烦恼吗?CodeCombat游戏化编程学习平台彻…...

手把手教你校准ICM-20948磁力计:从‘八字法’到代码实现,解决姿态角‘指南针’不准
ICM-20948磁力计校准实战:从基础原理到三维空间校准代码实现 当你第一次拿到ICM-20948这样的9轴运动传感器时,可能会被其丰富的功能所吸引——三轴加速度计、三轴陀螺仪加上三轴磁力计,理论上可以完美解算出设备在空间中的姿态。但实际使用中…...
)
智能代码生成兼容性验证实战手册(2024企业级落地白皮书)
第一章:智能代码生成兼容性验证的定义与价值边界 2026奇点智能技术大会(https://ml-summit.org) 智能代码生成兼容性验证,是指在模型输出代码后,系统性评估其在目标运行环境(如特定语言版本、依赖库约束、安全策略、构建工具链&a…...

幻灯片制作工具GiliSoft SlideShow Maker
链接: https://pan.baidu.com/s/1EUYCTUcMfqxqZQf_TbcMMg 提取码: dc1a GiliSoft SlideShow Maker原名字GiliSoft SlideShow Movie Creator是易于使用但功能强大的照片到视频转换器。借助SlideShow Movie Creator,您可以将您的照片与音乐和2D / 3D过渡效果结合在一…...

RTX 4090显卡性能释放:造相-Z-Image文生图引擎速度与画质双评测
RTX 4090显卡性能释放:造相-Z-Image文生图引擎速度与画质双评测 1. 为什么RTX 4090需要专属文生图方案? 当大多数AI绘画工具还在追求"能跑就行"时,高端显卡用户已经面临新的困境。RTX 4090作为消费级显卡的旗舰产品,其…...