基于深度学习YOLOv8+PyQt5的水底海底垃圾生物探测器检测识别系统(源码+数据集+配置说明)
wx供重浩:创享日记
对话框发送:323海底
获取完整源码+7000张数据集+配置说明+文件说明+远程操作配置环境跑通程序
效果展示
基于深度学习YOLOv8+PyQt5的水底海底垃圾生物探测器检测识别系统设计(源码+数据集+配置文件)


各文件说明

程序运行说明
---------【第一步:安装python3.9】---------
方法一【推荐】:
先安装ananconda软件,官网地址:https://www.anaconda.com/download
安装完成后,在conda命令窗口,使用命令"conda create -n yolov8 python=3.9"创建3.9的虚拟环境
然后激活虚拟环境“conda activate py39”,然后再进行第二步依赖库的安装。
方法二:
直接在python官网下载pyhon3.9的exe文件,安装即可。
---------【第二步:安装软件所需的依赖库】---------
(注意:输入命令前,命令行需先进入项目目录的路径下,不然会提示找不到文件)
方法一:【推荐】
直接运行installPackages.py一键安装第三方库的脚本。命令为:python installPackages.py
方法二: 运行下方命令
pip install -r requirements.txt -i https://pypi.tuna.tsinghua.edu.cn/simple
---------【运行程序】---------
按照以上两步环境配置完成后,直接运行MainProgram.py文件即可打开程序。
命令为:python MainProgram.py
模型评价指标
mAP (mean Average Precision): 平均精度均值是目标检测领域中最常用的评价指标之一。它衡量的是模型在不同IoU(Intersection over Union,交集与并集的比值)阈值下的性能。mAP通常在0到1之间,值越高表示模型性能越好。mAP50-95是一个更严格的评价指标,它计算了在50-95%的IoU阈值范围内的mAP值,然后取平均,这能够更准确地评估模型在不同IoU阈值下的性能。
Precision (精度): 精度是评估模型预测正确的正样本的比例。它表示在所有被模型预测为正类的样本中,实际为正类的比例。
Recall (召回率): 召回率是评估模型对真实目标检测率的指标。它表示模型正确预测出的目标数量与真实目标数量的比例。
F1 Score (F1分数): F1分数综合了精度和召回率两个指标,用于评估模型的综合性能。它是精确率和召回率的调和平均值,适用于在不平衡类别分布的情况下评估模型性能。
IoU (Intersection over Union): 交集大于联合是量化预测边界框与地面实况边界框之间重叠程度的指标。IoU的值介于0和1之间,值越高表示预测边界框与实际边界框的重叠程度越高。
FPS (Frames Per Second): 每秒帧数是衡量模型实时性能的指标,特别是在视频处理或实时应用中。FPS越高,表示模型处理速度越快。
这些指标共同提供了对YOLO模型性能的全面评估,包括模型的准确性、效率和实用性。在实际应用中,根据具体需求和场景,可能会重点考虑某些指标。例如,在需要高实时性的应用中,FPS可能是一个关键指标;而在对准确性要求极高的场景中,mAP和精度可能是更重要的评价标准。





在海洋环境保护和水下生态研究领域,及时发现并处理水底生物垃圾是维护水下生态环境健康的重要任务。然而,由于水下环境的复杂性和多变性,传统的人工监测方法既耗时又效率低下。为了提高水下生物垃圾监测的效率和准确性,本文提出了一种基于YOLOv8(You Only Look Once version 8)和PyQt5的水底生物垃圾探测器检测系统。该系统结合了深度学习技术和图形用户界面框架,旨在实时监测并识别水下环境中的生物垃圾。
水底生物垃圾探测器检测系统的设计和实现如下:
系统设计
数据集准备
首先,需要收集和标注一个包含各种水下环境和生物垃圾的图像数据集。数据集应涵盖不同类型的生物垃圾,如塑料、渔网、玻璃瓶等,以及它们在不同水质、光照和深度条件下的外观。图像标注需要精确识别出生物垃圾的位置和类别,以便训练模型进行有效识别。
模型训练
利用准备好的数据集,对YOLOv8模型进行训练。在训练过程中,需要调整超参数,如学习率、批大小和训练周期,以优化模型在水下环境中的检测性能。同时,采用数据增强技术,如随机调整亮度、对比度和水波纹模拟,以提高模型对水下复杂环境的适应性。
系统实现
系统核心是YOLOv8模型,负责从水下摄像头捕获的实时图像中检测生物垃圾。系统还包括一个基于PyQt5的用户界面,用于展示检测结果和发出警报。当检测到生物垃圾时,系统会通过声音或视觉信号通知研究人员或清洁人员。
实时检测
为了实现实时监测,系统必须能够在低延迟下处理图像数据。这意味着模型不仅要准确,还要具备高效的推理能力。在实际部署时,可能需要在专用的水下无人机或自动化监测设备上运行模型,以实现自主监测和快速响应。
结果与讨论
在测试集上,YOLOv8模型显示出了较高的水底生物垃圾检测准确率。模型能够在多种水下环境和光照条件下稳定识别不同类型的生物垃圾。尽管如此,在处理水下生物垃圾被水流移动或与其他物体混合的情况下,模型的性能仍有待提高。
结论
本文提出的基于YOLOv8和PyQt5的水底生物垃圾探测器检测系统,能够有效地提升水下环境监测的自动化水平。通过实时监测和即时反馈,该系统有助于及时发现并处理水底生物垃圾,保护海洋生态环境。未来的工作将致力于进一步提升模型的鲁棒性,并探索更加高效的模型部署方案,以适应更多样化的水下环境。
部分PyQt5可视化代码
# -*- coding: utf-8 -*-
import time
from PyQt5.QtWidgets import QApplication , QMainWindow, QFileDialog, \QMessageBox,QWidget,QHeaderView,QTableWidgetItem, QAbstractItemView
import sys
import os
from PIL import ImageFont
from ultralytics import YOLO
sys.path.append('UIProgram')
from UIProgram.UiMain import Ui_MainWindow
import sys
from PyQt5.QtCore import QTimer, Qt, QThread, pyqtSignal,QCoreApplication
import detect_tools as tools
import cv2
import Config
from UIProgram.QssLoader import QSSLoader
from UIProgram.precess_bar import ProgressBar
import numpy as np
# import torchclass MainWindow(QMainWindow):def __init__(self, parent=None):super(QMainWindow, self).__init__(parent)self.ui = Ui_MainWindow()self.ui.setupUi(self)self.initMain()self.signalconnect()# 加载css渲染效果style_file = 'UIProgram/style.css'qssStyleSheet = QSSLoader.read_qss_file(style_file)self.setStyleSheet(qssStyleSheet)def signalconnect(self):self.ui.PicBtn.clicked.connect(self.open_img)self.ui.comboBox.activated.connect(self.combox_change)self.ui.VideoBtn.clicked.connect(self.vedio_show)self.ui.CapBtn.clicked.connect(self.camera_show)self.ui.SaveBtn.clicked.connect(self.save_detect_video)self.ui.ExitBtn.clicked.connect(QCoreApplication.quit)self.ui.FilesBtn.clicked.connect(self.detact_batch_imgs)def initMain(self):self.show_width = 770self.show_height = 480self.org_path = Noneself.is_camera_open = Falseself.cap = None# self.device = 0 if torch.cuda.is_available() else 'cpu'# 加载检测模型self.model = YOLO(Config.model_path, task='detect')self.model(np.zeros((48, 48, 3))) #预先加载推理模型self.fontC = ImageFont.truetype("Font/platech.ttf", 25, 0)# 用于绘制不同颜色矩形框self.colors = tools.Colors()# 更新视频图像self.timer_camera = QTimer()# 更新检测信息表格# self.timer_info = QTimer()# 保存视频self.timer_save_video = QTimer()# 表格self.ui.tableWidget.verticalHeader().setSectionResizeMode(QHeaderView.Fixed)self.ui.tableWidget.verticalHeader().setDefaultSectionSize(40)self.ui.tableWidget.setColumnWidth(0, 80) # 设置列宽self.ui.tableWidget.setColumnWidth(1, 200)self.ui.tableWidget.setColumnWidth(2, 150)self.ui.tableWidget.setColumnWidth(3, 90)self.ui.tableWidget.setColumnWidth(4, 230)# self.ui.tableWidget.horizontalHeader().setSectionResizeMode(QHeaderView.Stretch) # 表格铺满# self.ui.tableWidget.horizontalHeader().setSectionResizeMode(0, QHeaderView.Interactive)# self.ui.tableWidget.setEditTriggers(QAbstractItemView.NoEditTriggers) # 设置表格不可编辑self.ui.tableWidget.setSelectionBehavior(QAbstractItemView.SelectRows) # 设置表格整行选中self.ui.tableWidget.verticalHeader().setVisible(False) # 隐藏列标题self.ui.tableWidget.setAlternatingRowColors(True) # 表格背景交替# 设置主页背景图片border-image: url(:/icons/ui_imgs/icons/camera.png)# self.setStyleSheet("#MainWindow{background-image:url(:/bgs/ui_imgs/bg3.jpg)}")def open_img(self):if self.cap:# 打开图片前关闭摄像头self.video_stop()self.is_camera_open = Falseself.ui.CaplineEdit.setText('摄像头未开启')self.cap = None# 弹出的窗口名称:'打开图片'# 默认打开的目录:'./'# 只能打开.jpg与.gif结尾的图片文件# file_path, _ = QFileDialog.getOpenFileName(self.ui.centralwidget, '打开图片', './', "Image files (*.jpg *.gif)")file_path, _ = QFileDialog.getOpenFileName(None, '打开图片', './', "Image files (*.jpg *.jepg *.png)")if not file_path:returnself.ui.comboBox.setDisabled(False)self.org_path = file_pathself.org_img = tools.img_cvread(self.org_path)# 目标检测t1 = time.time()self.results = self.model(self.org_path)[0]t2 = time.time()take_time_str = '{:.3f} s'.format(t2 - t1)self.ui.time_lb.setText(take_time_str)location_list = self.results.boxes.xyxy.tolist()self.location_list = [list(map(int, e)) for e in location_list]cls_list = self.results.boxes.cls.tolist()self.cls_list = [int(i) for i in cls_list]self.conf_list = self.results.boxes.conf.tolist()self.conf_list = ['%.2f %%' % (each*100) for each in self.conf_list]# now_img = self.cv_img.copy()# for loacation, type_id, conf in zip(self.location_list, self.cls_list, self.conf_list):# type_id = int(type_id)# color = self.colors(int(type_id), True)# # cv2.rectangle(now_img, (int(x1), int(y1)), (int(x2), int(y2)), colors(int(type_id), True), 3)# now_img = tools.drawRectBox(now_img, loacation, Config.CH_names[type_id], self.fontC, color)now_img = self.results.plot()self.draw_img = now_img# 获取缩放后的图片尺寸self.img_width, self.img_height = self.get_resize_size(now_img)resize_cvimg = cv2.resize(now_img,(self.img_width, self.img_height))pix_img = tools.cvimg_to_qpiximg(resize_cvimg)self.ui.label_show.setPixmap(pix_img)self.ui.label_show.setAlignment(Qt.AlignCenter)# 设置路径显示self.ui.PiclineEdit.setText(self.org_path)# 目标数目target_nums = len(self.cls_list)self.ui.label_nums.setText(str(target_nums))# 设置目标选择下拉框choose_list = ['全部']target_names = [Config.names[id]+ '_'+ str(index) for index,id in enumerate(self.cls_list)]# object_list = sorted(set(self.cls_list))# for each in object_list:# choose_list.append(Config.CH_names[each])choose_list = choose_list + target_namesself.ui.comboBox.clear()self.ui.comboBox.addItems(choose_list)if target_nums >= 1:self.ui.type_lb.setText(Config.CH_names[self.cls_list[0]])self.ui.label_conf.setText(str(self.conf_list[0]))# 默认显示第一个目标框坐标# 设置坐标位置值self.ui.label_xmin.setText(str(self.location_list[0][0]))self.ui.label_ymin.setText(str(self.location_list[0][1]))self.ui.label_xmax.setText(str(self.location_list[0][2]))self.ui.label_ymax.setText(str(self.location_list[0][3]))else:self.ui.type_lb.setText('')self.ui.label_conf.setText('')self.ui.label_xmin.setText('')self.ui.label_ymin.setText('')self.ui.label_xmax.setText('')self.ui.label_ymax.setText('')# # 删除表格所有行self.ui.tableWidget.setRowCount(0)self.ui.tableWidget.clearContents()self.tabel_info_show(self.location_list, self.cls_list, self.conf_list,path=self.org_path)if __name__ == "__main__":app = QApplication(sys.argv)win = MainWindow()win.show()sys.exit(app.exec_())
相关文章:
基于深度学习YOLOv8+PyQt5的水底海底垃圾生物探测器检测识别系统(源码+数据集+配置说明)
wx供重浩:创享日记 对话框发送:323海底 获取完整源码7000张数据集配置说明文件说明远程操作配置环境跑通程序 效果展示 基于深度学习YOLOv8PyQt5的水底海底垃圾生物探测器检测识别系统设计(源码数据集配置文件) 各文件说明 程序运…...
SpringBoot集成WebSocket实现简单的多人聊天室
上代码—gitee下载地址: https://gitee.com/bestwater/Spring-websocket.git下载代码,连上数据库执行SQL,就可以运行,最终效果...

如何使用固定公网地址远程访问内网Axure RP生成的网站原型web页面
文章目录 前言1.在AxureRP中生成HTML文件2.配置IIS服务3.添加防火墙安全策略4.使用cpolar内网穿透实现公网访问4.1 登录cpolar web ui管理界面4.2 启动website隧道4.3 获取公网URL地址4.4. 公网远程访问内网web站点4.5 配置固定二级子域名公网访问内网web站点4.5.1创建一条固定…...
蓝桥杯习题
https://www.lanqiao.cn/problems/1265/learning/ 第一题---排序 给定一个长度为N的数组A,请你先从小到大输出它的每个元素,再从大到小输出他的每个元素。 输入描述: 第一行包含一个整数N 第二行包含N个整数a1,a2,a3,...an,表…...

AMS概念以及面试相关整理
1、ActivityManagerService是什么?什么时候初始化的?有什么作用? ActivityManagerService(AMS)是什么? ActivityManagerService(简称AMS)是Android操作系统中的一个核心服务&#…...
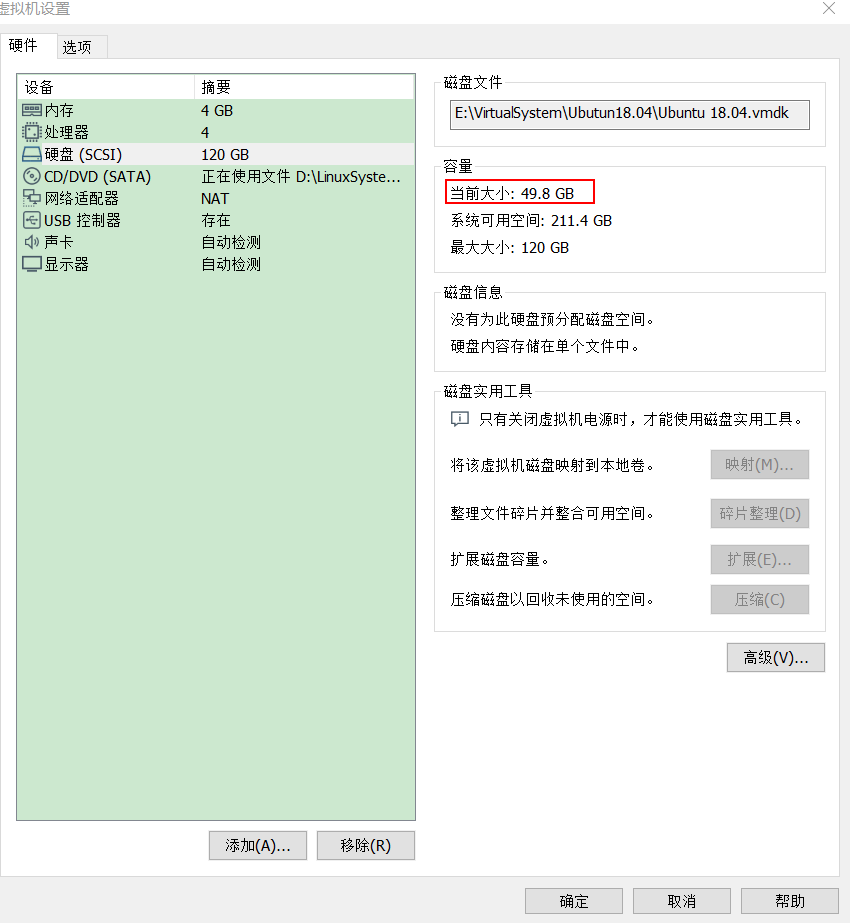
Vmware下减小Ubuntu系统占用系统盘大小
1、虚拟机设置下占用空间 如图,给虚拟机分配了120GB,已经占用116.9GB,开机会提示空间不足。 2、实际使用空间 ubuntu系统下使用“df -h”命令查看实际使用空间大小50GB左右 造成这个原因是,虚拟机的bug:在虚拟机的ub…...

面试题-Elasticsearch集群架构和调优手段(超全面)
对于Elasticsearch(ES),我了解并有经验。在我之前的公司,我们有一个相对大型的ES集群,以下是该集群的架构和一些调优手段的概述: 1. 集群架构 集群规模:我们的ES集群由15个节点组成,…...

python基础练习题6
1、找出10000以内能被5或6整除,但不能被两者同时整除的数(函数) def find_numbers(m,n):result []for num in range(m,n):if (num % 5 0 or num % 6 0) and not (num % 5 0 and num % 6 0):result.append(num)return resultprint(find_…...

Chrome 插件各模块使用 Fetch 进行接口请求
Chrome 插件各模块使用 Fetch 进行接口请求 常规网页可以使用 fetch() 或 XMLHttpRequest API 从远程服务器发送和接收数据,但受到同源政策的限制。 内容脚本会代表已注入内容脚本的网页源发起请求,因此内容脚本也受同源政策的约束,插件的来…...

内存可见性
内存可见性 一:内存可见性1.2: 二:解决内存可见性问题2.1 volatile关键字2.2:synchronized关键字解决内存可见性问题 一:内存可见性 public class Demo1 {public static int count 0;public static void main(String[] args) throws InterruptedException {Thread t1new Thre…...
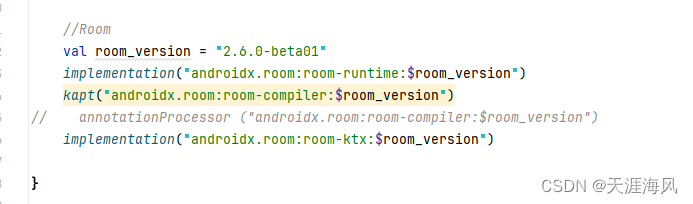
Android room 在dao中不能使用挂起suspend 否则会报错
错误: Type of the parameter must be a class annotated with Entity or a collection/array of it. kotlin.coroutines.Continuation<? super kotlin.Unit> $completion); 首先大家检查一下几个点 一、kotlin-kapt 二、 是否引入了 room-ktx 我是2024年…...
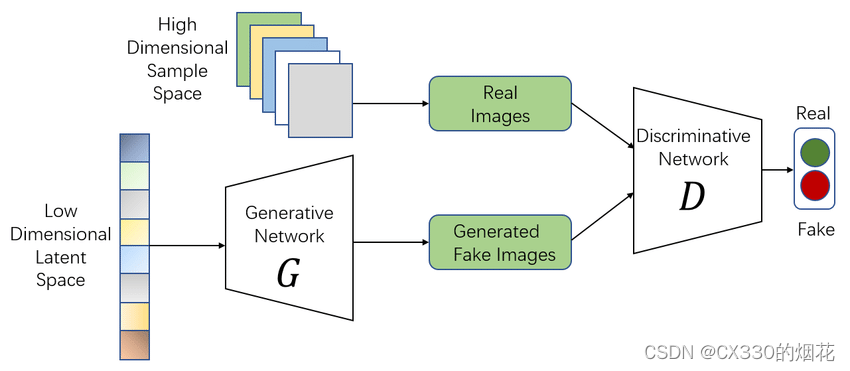
【stable diffusion扩散模型】一篇文章讲透
目录 一、引言 二、Stable Diffusion的基本原理 1 扩散模型 2 Stable Diffusion模型架构 3 训练过程与算法细节 三、Stable Diffusion的应用领域 1 图像生成与艺术创作 2 图像补全与修复 3 其他领域 四、Stable Diffusion的优势与挑战 👉优势 …...

数据链路层之信道:数字通信的桥梁与守护者
✨✨ 欢迎大家来访Srlua的博文(づ ̄3 ̄)づ╭❤~✨✨ 🌟🌟 欢迎各位亲爱的读者,感谢你们抽出宝贵的时间来阅读我的文章。 我是Srlua小谢,在这里我会分享我的知识和经验。&am…...

SQL109 纠错4(组合查询,order by..)
SELECT cust_name, cust_contact, cust_email FROM Customers WHERE cust_state MI UNION SELECT cust_name, cust_contact, cust_email FROM Customers WHERE cust_state IL ORDER BY cust_name;order by子句,必须位于最后一条select语句之后...

Spring Boot + Vue 实现文件导入导出功能
文章目录 1、概述2、后端实现(Spring Boot)3、前端实现(Vue)4、总结 1、概述 在现代Web应用开发中,文件的导入导出是一个常见的需求。Spring Boot作为后端开发的强大框架,搭配前端框架Vue,可…...

vue watch 深度监听
vue2文档:API — Vue.js vue3文档:侦听器 | Vue.js watch 可以用来监听页面中的数据,但如果监听的源是对象或数组,则使用深度监听,强制深度遍历源,以便在深度变更时触发回调。 一,监听 <t…...
Qt源码调试步骤记录
1.源码: 两种方式,要么安装qt时选择source,要么从官网下载源码,然后在qt creator中设置路径。二选一即可。我选的第二种。 1.1.第一种,安装时选择source: 1.2.第二种,下载源码设置路径&#x…...
)
大数据面试英文自我介绍参考(万字长文)
发现有一个怪圈,如果码农年龄35+,除非非常匹配,不然在国内企业筛选可能就筛选不过。国外码农可以干到40+、50+。一些外企,对年龄35+的码农依然青睐。这些外企对英文是有要求,通常是要英文自我介绍,下面提供一些英文自我介绍参考。 参考1: Good morning/afternoon, I a…...

外包干了5天,技术退步明显.......
先说一下自己的情况,大专生,18年通过校招进入杭州某软件公司,干了接近4年的功能测试,今年年初,感觉自己不能够在这样下去了,长时间呆在一个舒适的环境会让一个人堕落! 而我已经在一个企业干了四年的功能测…...

Docket常见的软件部署1
1 安装MySQL # 查看MySQL镜像 docker search mysql # 拉起镜像 docker pull mysql:5.7 # 创建MySQL数据映射卷,防止数据不丢失 mkdir -p /hmoe/tem/docker/mysql/data/ # 启动镜像 docker run -d --name mysql -e MYSQL_ROOT_PASSWORD123456 -p 3306:3306 -v /home…...

从网易招聘看技术人择校与城市选择:一线城市VS武汉,哪里机会更多?
技术人择校与城市选择指南:数据驱动的职业发展决策 站在高考志愿填报或考研择校的十字路口,每个怀揣技术梦想的年轻人都面临着一个关键抉择:是追逐一线城市的产业聚集效应,还是选择武汉这类高校密集但名企较少的城市?这…...

【统计推断实战】从置信区间到假设检验:如何用数据做出可靠决策
1. 从产品迭代案例看统计推断的价值 最近团队上线了一个新功能,产品经理信心满满地宣称能提升15%的用户留存率。但上线一周后数据波动很大,有人觉得效果明显,有人却说毫无变化。这时候该信谁的?其实这就是统计推断大显身手的时刻—…...

CodeSandbox终极指南:10个让你开发效率倍增的隐藏功能
CodeSandbox终极指南:10个让你开发效率倍增的隐藏功能 【免费下载链接】codesandbox-client An online IDE for rapid web development 项目地址: https://gitcode.com/gh_mirrors/co/codesandbox-client CodeSandbox是一款强大的在线IDE,专为快速…...
技术解析与AI硬件加速实践)
计算内存(CIM)技术解析与AI硬件加速实践
1. 计算内存(CIM)技术解析:突破传统架构的能效瓶颈 在AI硬件加速领域,计算内存(Compute-in-Memory, CIM)正引发一场架构革命。传统冯诺依曼架构中"内存墙"问题已成为制约AI计算效率的主要瓶颈——…...

Perplexity无法解析Springer LaTeX公式?2024.06最新MathJax兼容补丁+3类数学文献精准摘要生成术
更多请点击: https://intelliparadigm.com 第一章:Perplexity解析Springer文献的底层机制与失效归因 Perplexity 作为衡量语言模型预测能力的关键指标,在学术文献解析场景中常被误用为“质量代理”,尤其在处理 Springer 出版集团…...

5G O-RAN中AI驱动的延迟预测系统设计与优化
1. 项目背景与核心价值在5G O-RAN架构中,延迟控制一直是网络优化的核心痛点。传统电信设备厂商采用的黑盒方案,使得运营商难以针对特定场景进行精细化调优。而O-RAN的开放特性虽然带来了灵活性,但也引入了新的挑战——当CU(集中单…...

管 Vibe Coding 项目,就像管公共厕所
本文整理自"AI炼金术"播客对徐文浩的访谈,探讨 AI 辅助编程(Vibe Coding)在组织落地后面临的治理挑战和应对策略。从"屎山三年一遇"到"屎山月月有"传统软件开发中,一个系统的"屎山化"通常…...
:超出3个指标即触发强制重构——你达标了吗?)
DeepSeek Clean Code终极阈值(v2.3.1正式版):超出3个指标即触发强制重构——你达标了吗?
更多请点击: https://intelliparadigm.com 第一章:DeepSeek Clean Code终极阈值的演进与哲学内核 DeepSeek Clean Code 的“终极阈值”并非静态指标,而是代码可维护性、语义清晰度与执行确定性三者动态收敛的临界点。它源于对 LLM 推理链中 …...

LayerDivider终极指南:5分钟掌握智能插画分层技术
LayerDivider终极指南:5分钟掌握智能插画分层技术 【免费下载链接】layerdivider A tool to divide a single illustration into a layered structure. 项目地址: https://gitcode.com/gh_mirrors/la/layerdivider 你是否曾经面对一张复杂的插画作品…...

taotoken控制台提供的api调用审计与用量分析功能体验
🚀 告别海外账号与网络限制!稳定直连全球优质大模型,限时半价接入中。 👉 点击领取海量免费额度 taotoken控制台提供的api调用审计与用量分析功能体验 对于需要统一管理多个大模型API调用的团队而言,清晰掌握调用情况…...