探究“大模型+机器人”的现状和未来
基础模型(Foundation Models)是近年来人工智能领域的重要突破,在自然语言处理和计算机视觉等领域取得了显著成果。将基础模型引入机器人学,有望从感知、决策和控制等方面提升机器人系统的性能,推动机器人学的发展。由斯坦福大学、普林斯顿大学等多所顶尖学府,以及英伟达、Google DeepMind等众多知名企业组成的联合研究团队,发布了一篇综述报告。该报告全面梳理了基础模型在机器人学各个领域的应用现状,分析了其优势和局限性,并展望未来的研究方向。

超维开关柜带电操作机器人
基础模型通过在大规模数据上进行预训练,学习到了丰富的语义信息和世界知识。与传统的特定任务模型不同,基础模型具有较强的通用性和迁移能力,能够应用于多种不同的下游任务。一方面,基础模型能够作为机器人系统的先验知识,减少对任务特定数据的依赖;另一方面,基础模型可以作为机器人系统的通用组件,实现感知、推理和规划等核心功能。
基础模型主要包括以下几类:
1、大型语言模型(Large Language Models):如BERT、GPT-3、PaLM等,主要应用于自然语言处理任务。
2、视觉Transformer模型:如ViT、Swin Transformer等,主要应用于计算机视觉任务。
3、视觉-语言模型(Vision-Language Models):如CLIP、ALIGN等,通过跨模态对比学习实现视觉与语言的对齐。
4、具身多模态语言模型(Embodied Multimodal Language Models):如R3M,将视觉、语言与机器人动作相结合进行学习。
5、视觉生成模型(Visual Generative Models):如扩散模型和GAN等,用于视觉信号的生成。
机器人感知中的基础模型应用

感知是机器人系统的重要组成部分,旨在从原始传感器数据中提取语义信息,以支持决策和控制。传统的机器人感知方法依赖于特定场景下的特征工程和模型设计,难以适应开放环境的复杂性和多样性。近年来,深度学习的发展使得从大规模数据中端到端地学习感知模型成为可能。基础模型进一步扩展了这一范式,使得机器人系统能够利用更广泛的先验知识,实现更强大、更通用的感知能力。
基础模型为机器人感知提供了先验知识和泛化能力。在视觉感知方面,视觉Transformer模型实现了更鲁棒、更通用的特征提取;在语义感知方面,视觉-语言模型实现了开放词汇的识别和理解;在交互感知方面,具身语言模型实现了跨模态的指令跟随和技能学习。未来,如何进一步提高基础模型在机器人感知任务中的性能和效率,如何利用多模态信息实现更高层次的场景理解,都是亟需探索的方向。
机器人决策与规划中的基础模型应用

超维机房轮式巡检机器人
决策与规划是机器人系统的核心功能,旨在根据感知信息和任务目标,自主地选择行动策略并生成动作序列。传统的机器人决策与规划方法依赖于精确的环境模型和专家知识,难以适应非结构化环境的不确定性和复杂性。近年来,深度强化学习的发展使得机器人能够从数据中学习决策与规划策略,但其样本效率和泛化能力仍有待提高。基础模型为机器人决策与规划引入了丰富的先验知识,有望进一步促进该领域的发展。
基础模型为机器人决策与规划引入了语言理解、常识推理等关键能力。在任务规划方面,大型语言模型实现了将自然语言指令转化为可执行计划;在运动规划方面,扩散模型实现了平滑、多样轨迹的生成;在策略学习方面,视觉-语言模型实现了高效、泛化的策略学习。尽管取得了可喜的进展,但如何进一步提高基础模型在机器人决策与规划中的可解释性、安全性和实时性仍是亟需探索的问题。此外,如何将决策与规划与感知、控制更紧密地结合,构建端到端的自主系统,也是未来的重要研究方向。
机器人控制中的基础模型应用

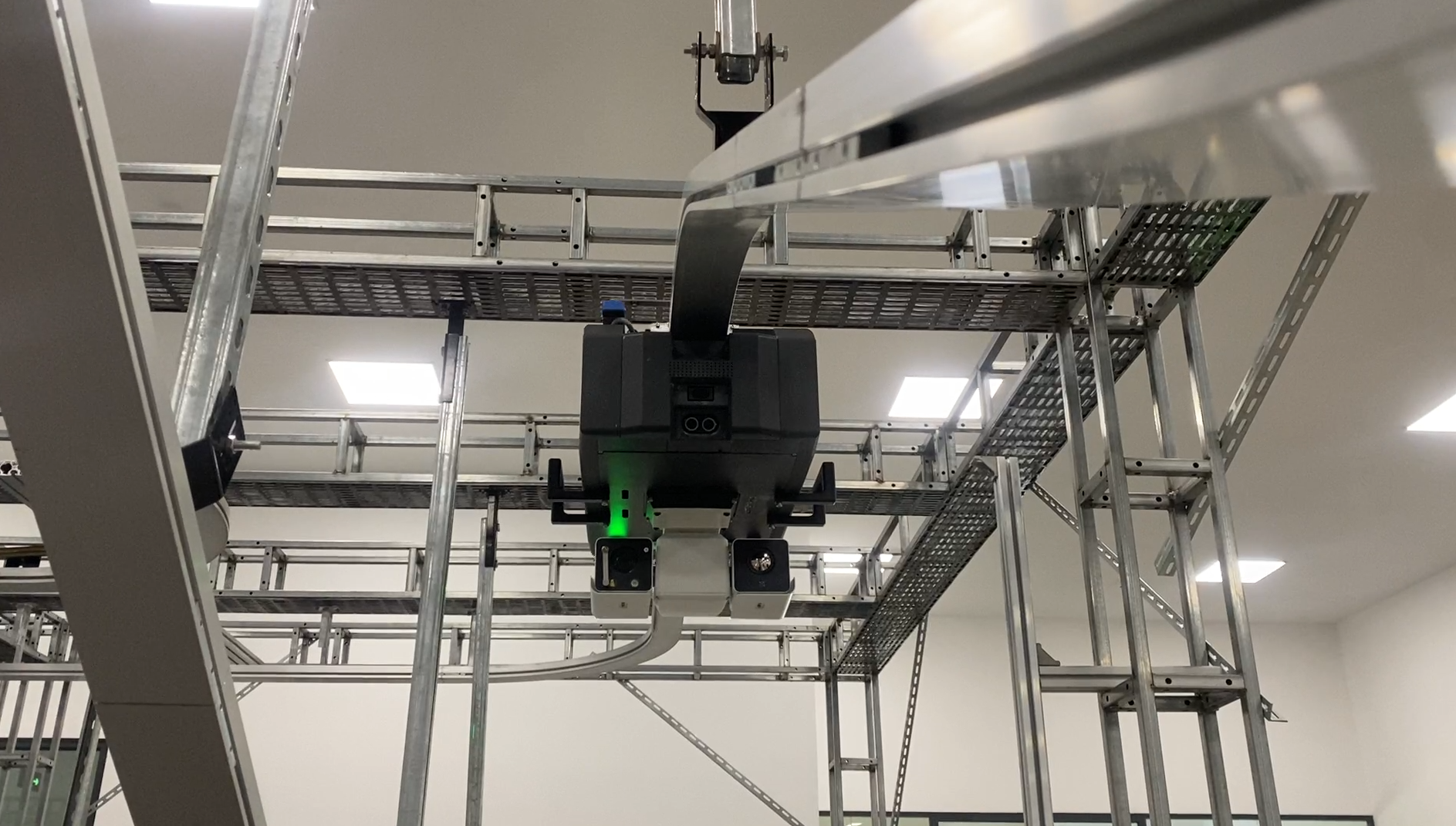
超维室内轨道巡检机器人
控制是机器人系统的执行部分,旨在根据感知信息和决策指令,精准、稳定地控制机器人执行器完成预定动作。传统的机器人控制方法依赖于精确的动力学模型和专家知识,难以适应非结构化环境的不确定性和复杂性。近年来,学习型控制的发展使得机器人能够从数据中学习控制策略,但其泛化能力和鲁棒性仍有待提高。基础模型为机器人控制引入了丰富的先验知识和泛化能力,有望进一步突破传统控制方法的局限性。
超维智能巡检机器人核心竞争力
基于SLAM无轨导航技术:采用了激光SLAM、RGBD相机、惯性导航相结合的综合定位导航方案,率先引入了激光雷达+深度摄像机+辅助信标的方式进行“综合性导航+避障”解决方案,达到<1°的角度精度以及±2cm级别的定位精度。
基于AI深度学习的视觉识别:整合Yolo、RepVGG和HRnet等先进模型深度优化打造了集检测、分割和识别于一体的深度学习算法。在服务端边缘端均可快速部署,具有高速度、高精度、高性能的优势,在实际交付中可达到96%以上准确率。
AI大数据分析:AI大数据分析,可同时分析多载具上传的数据,对机器人巡检数据进行实时采集、留存、告警管理。分布式边缘计算架构,提高巡检实时性,降低系统总线带宽需求。
自主研发的机器人调度系统:超维自主研发了AIoT机器人联合巡检管理平台,把AI技术引入到机器人系统中,构建软硬件一体的机器人智能巡检解决方案,使机器人具备目标检测、音视频采集分析、人脸识别、动环监测等功能。
自主设计与制造:机器人本体设计与制造方面,依托于超维在金融、电力等大型客户的积累,从机器人的通用底盘,智能硬件到外观结构与设计,整机电路设计,上位机及面向应用场景开发,掌握从产品设计到量产十多个环节。
“大模型+巡检机器人”的未来展望
超维管廊轨道巡检机器人
大型语言模型和智能巡检机器人的结合将为设备管理和运维领域带来巨大的改变和发展机会。这种结合将推动设备管理向智能化、自主化、预测性和安全性方向发展,为各行业提供更高效、更可靠、更安全的运营和生产环境。
1. 智能化巡检与维护: 结合大型语言模型和智能巡检机器人,可以实现更智能化的设备巡检和维护。语言模型可以处理和分析大量的设备数据和报告,提供实时的问题诊断和解决方案,从而降低设备故障率和维修成本。
2. 自主化运行和优化: 大型语言模型和智能巡检机器人的结合将使机器人系统具备更高的自主化运行和优化能力。机器人可以根据语言模型分析的数据和趋势,自主调整巡检路线和周期,优化资源利用,提升运行效率和性能。
3. 预测性维护和故障预防: 结合大型语言模型的预测能力和机器人的巡检能力,可以实现更加精准的预测性维护和故障预防。系统可以通过分析历史数据和趋势,提前发现潜在问题,并采取相应措施,避免设备故障和停机时间。
4. 智能化数据分析与决策支持: 大型语言模型和智能巡检机器人的结合还可以实现更智能化的数据分析和决策支持。机器人可以收集大量的设备数据并与语言模型进行分析,为管理人员提供实时的数据报告、趋势分析和决策建议,帮助他们做出更加明智的决策。
5. 安全管理和环境监测: 进一步结合大型语言模型和智能巡检机器人可以实现更全面的安全管理和环境监测。机器人可以巡检设备状态、环境条件等,并根据语言模型分析的数据,提供安全预警和环境优化建议,保障工作场所的安全和生产环境的良好状态。
大型语言模型和机器人技术的未来展望非常广阔,它们的结合将推动人工智能技术向更加智能化、人性化、个性化的方向发展,为人类社会带来更多便利和进步。
相关文章:
探究“大模型+机器人”的现状和未来
基础模型(Foundation Models)是近年来人工智能领域的重要突破,在自然语言处理和计算机视觉等领域取得了显著成果。将基础模型引入机器人学,有望从感知、决策和控制等方面提升机器人系统的性能,推动机器人学的发展。由斯坦福大学、普林斯顿大学…...

Commitizen:规范化你的 Git 提交信息
简介 在团队协作开发过程中,规范化的 Git 提交信息可以提高代码维护的效率,便于追踪和定位问题。Commitizen 是一个帮助我们规范化 Git 提交信息的工具,它提供了一种交互式的方式来生成符合约定格式的提交信息。 原理 Commitizen 的核心原…...
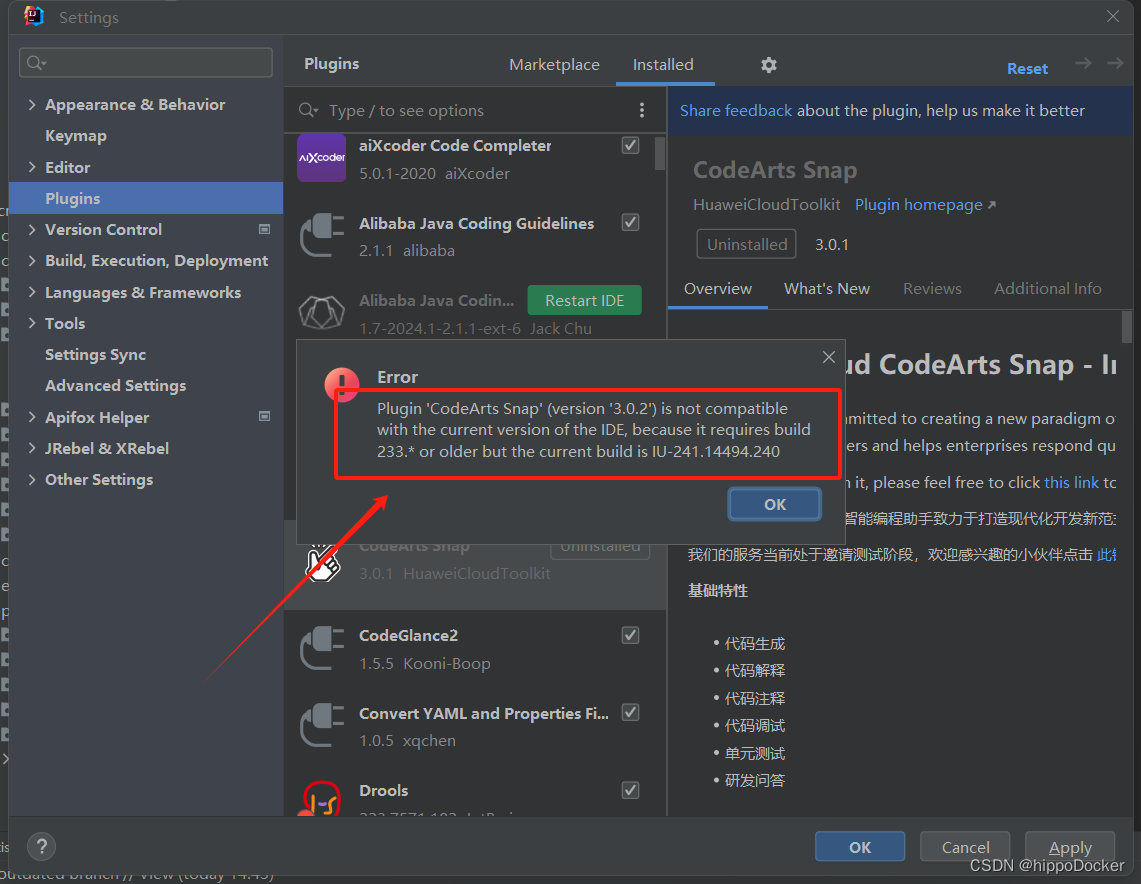
官网下载IDE插件并导入IDE
官网下载IDEA插件并导入IDEA 1. 下载插件2. 导入插件 1. 下载插件 地址:https://plugins.jetbrains.com/plugin/21068-codearts-snap/versions 说明:本次演示以IDEA软件为例 操作: 等待下载完成 2. 导入插件 点击File->setting->Pl…...

三行命令解决Ubuntu Linux联网问题
本博客中Ubuntu版本为23.10.1最新版本,后续发现了很多问题我无法解决,已经下载了另外一个版本22.04,此版本自带网络 一开始我找到官方文档描述可以通过命令行连接到 WiFi 网络:https://cn.linux-console.net/?p10334#google_vig…...

AI大模型在自然语言处理中的应用:性能表现和未来趋势
引言 A. AI大模型在自然语言处理中的应用背景简介 近年来,随着深度学习和人工智能技术的快速发展,越来越多的研究人员和企业开始关注应用于自然语言处理的AI大模型。这些模型采用了深层的神经网络结构,具有强大的学习和处理能力,…...

三防平板定制服务:亿道信息与个性化生产的紧密结合
在当今数字化时代,个性化定制已经成为了市场的一大趋势,而三防平板定制服务作为其中的一部分,展现了数字化技术与个性化需求之间的紧密结合。这种服务是通过亿道信息所提供的技术支持,为用户提供了满足特定需求的定制化三防平板&a…...

【备战蓝桥杯】2024蓝桥杯赛前突击省一:基础数论篇
2024蓝桥杯赛前突击省一:基础算法模版篇 基础数论算法回顾 判断质数(试除法) 时间复杂度O(sqrt(n)) static int is_prime(int n){if(n<2) return 0;for (int i2;i<n/i;i){if(n%i0) return 0;}return 1; }质因…...
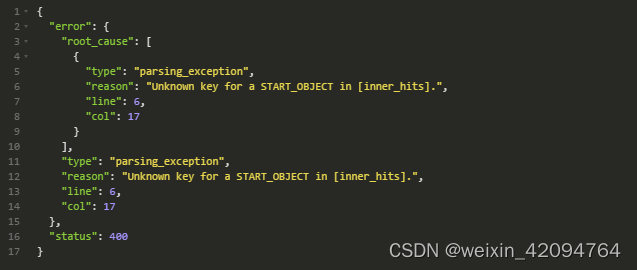
golang es查询的一些操作,has_child,inner_hit,对索引内父子文档的更新
1.因为业务需要查询父文档以及其下子文档,搞了很久才理清楚。 首先还是Inner_hits,inner_hits只能用在nested,has_child,has_parents查询里面 {"query": {"nested": {"path": "comments","query": {"match…...

精准备份:如何自动化单个MySQL数据库的备份过程
自动化备份对于维护数据库的完整性和安全性至关重要。本指南将向您展示如何使用Shell脚本来自动化MySQL数据库的备份过程。 备份脚本内容 首先,这是我们将使用的备份脚本: #!/bin/bash# 完成数据库的定时备份 # 备份路径 BACKUP/data/backup/db # 当前…...
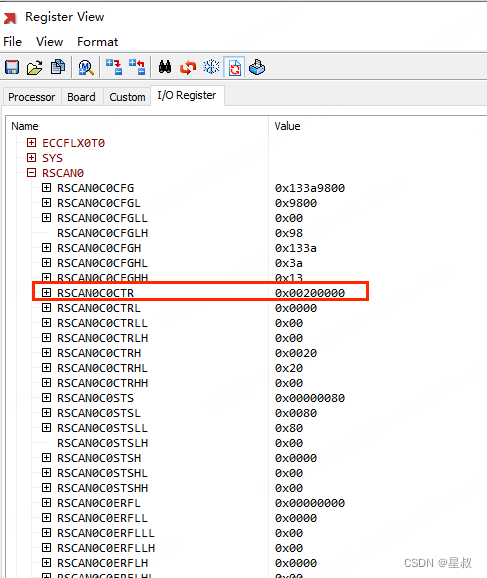
Green Hills 自带的MULTI调试器查看R7芯片寄存器
Green Hills在查看芯片寄存器时需要导入 .grd文件。下面以R7为例,演示一下过程。 首先打开MULTI调试器,如下所示View->Registers: 进入如下界面,选择导入寄存器定义文件.grd: 以当前R7芯片举例(dr7f7013…...
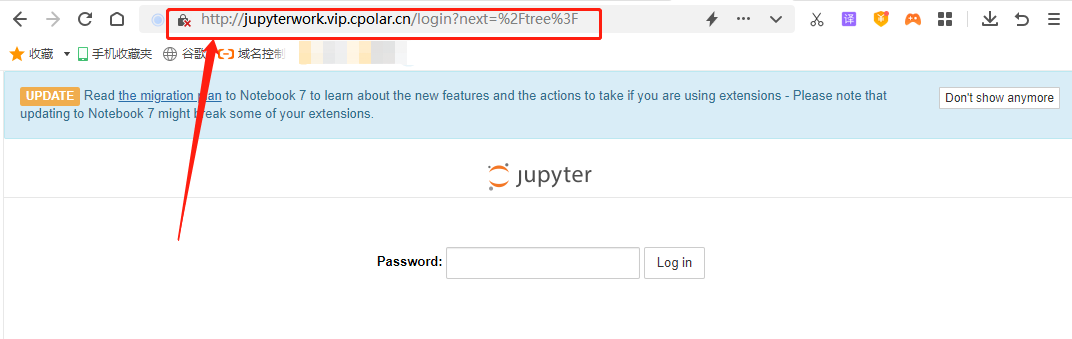
Jupyter Notbook如何安装配置并结合内网穿透实现无公网IP远程连接使用
文章目录 推荐1.前言2.Jupyter Notebook的安装2.1 Jupyter Notebook下载安装2.2 Jupyter Notebook的配置2.3 Cpolar下载安装 3.Cpolar端口设置3.1 Cpolar云端设置3.2.Cpolar本地设置 4.公网访问测试5.结语 推荐 前些天发现了一个巨牛的人工智能学习网站,通俗易懂&am…...
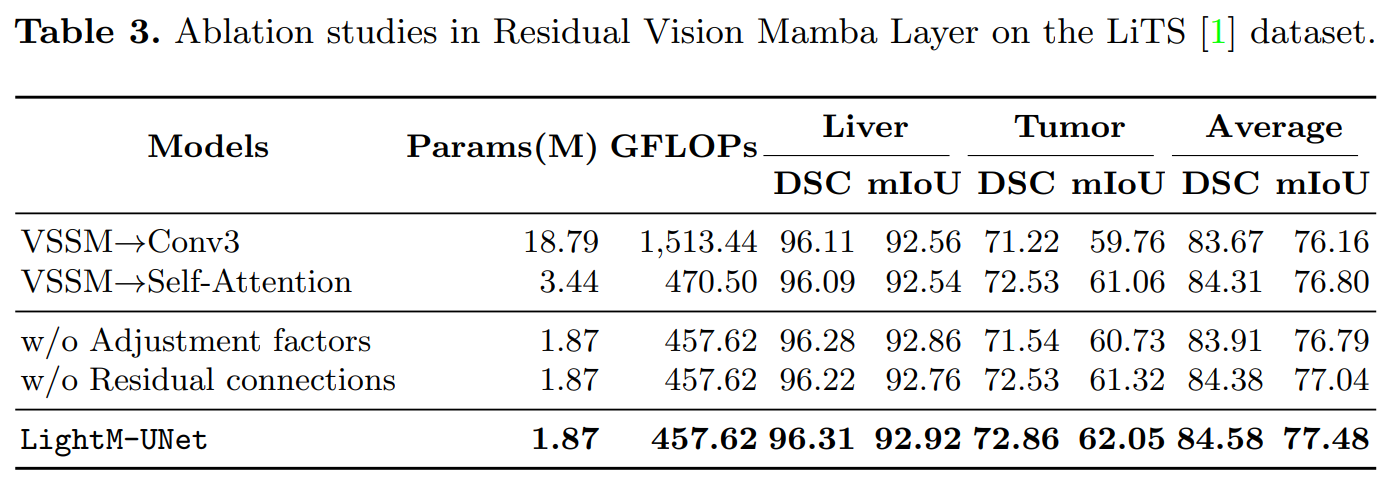
LightM-UNet:Mamba 辅助的轻量级 UNet 用于医学图像分割
文章目录 摘要1 简介2、方法论2.1、架构概述2.2、编码器块2.3、瓶颈块2.4、解码器块 3、实验4、结论 摘要 https://arxiv.org/pdf/2403.05246.pdf UNet及其变体在医学图像分割中得到了广泛应用。然而,这些模型,特别是基于Transformer架构的模型…...

探索 Java 网络爬虫:Jsoup、HtmlUnit 与 WebMagic 的比较分析
1、引言 在当今信息爆炸的时代,网络数据的获取和处理变得至关重要。对于 Java 开发者而言,掌握高效的网页抓取技术是提升数据处理能力的关键。本文将深入探讨三款广受欢迎的 Java 网页抓取工具:Jsoup、HtmlUnit 和 WebMagic,分析…...

day16 java object中equals、finalize、
Object类 1.Object类是所有类的父类。 2.一个类如果没有显示继承其它类默认继承Object类equals方法 1.Object中的equals方法 - 用来比较地址值 public boolean equals(Object obj) { return (this obj); } 2.像核心类库中的许多类都重写了equals方法(比如&…...
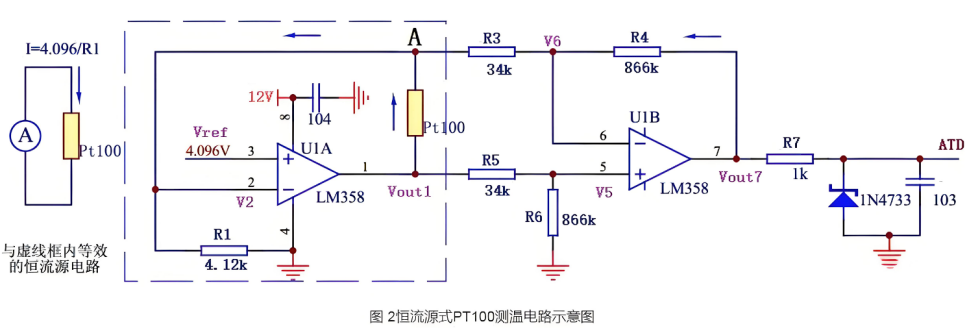
如何应用电桥电路的原理?
电桥电路是一种常用的测量技术,它利用了四个电阻的网络来检测电路的平衡状态。在平衡状态下,电桥的输出电压为零,这种特性使得电桥电路非常适合于精确测量电阻、电感、电容等电气参数,以及用于传感器和测量设备中。以下是电桥电路…...

大话设计模式——24.迭代器模式(Iterator Pattern)
简介 提供一种方法顺序访问一个聚合对象中各个元素,而又不暴露该对象的内部实现。(Java中使用最多的设计模式之一) UML图 应用场景 Java的集合对象:Collection、List、Map、Set等都有迭代器Java ArrayList的迭代器源码 示例 简…...

【数据结构】双向链表 C++
一、什么是双向链表 1、定义 双向链表也叫双链表,是链表的一种,它的每个数据结点中都有两个指针,分别指向直接后继和直接前驱。所以,从双向链表中的任意一个结点开始,都可以很方便地访问它的前驱结点和后继结点。 双…...
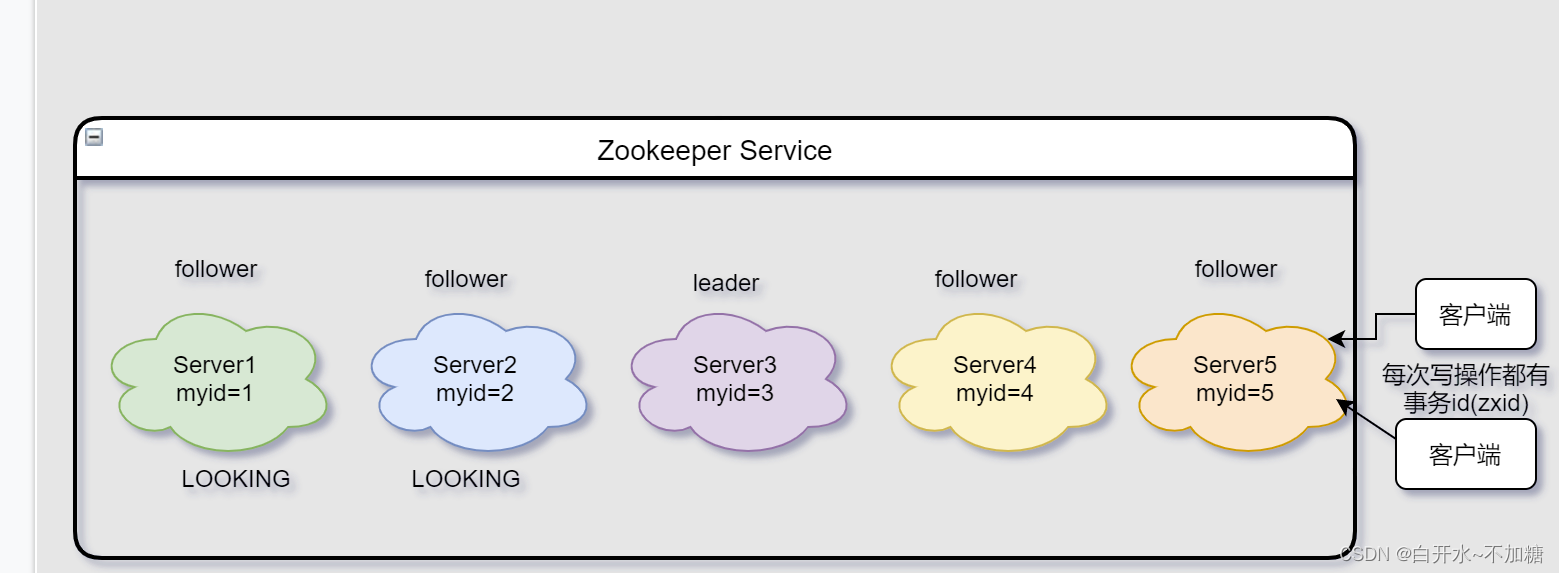
消息队列之-----------------zookeeper机制
目录 一、ZooKeeper是什么 二、ZooKeeper的工作机制 三、ZooKeeper特点 四、ZooKeeper数据结构 五、ZooKeeper应用场景 5.1统一命名服务 5.2统一配置管理 5.3统一集群管理 5.4服务器动态上下线 5.5软负载均衡 六、ZooKeeper的选举机制 6.1第一次启动选举机制 6.2非…...
第十届蓝桥杯大赛个人赛省赛(软件类) CC++ 研究生组2.0
A立方和 #include<iostream> #include<cmath> using namespace std; int main(){int n, t, flag, x;long long ans 0;for(int i 1; i < 2019; i){t i;flag 0;while(t && !flag){x t % 10;if(x 2 || x 0 || x 1 || x 9) flag 1;t / 10;}if(fl…...
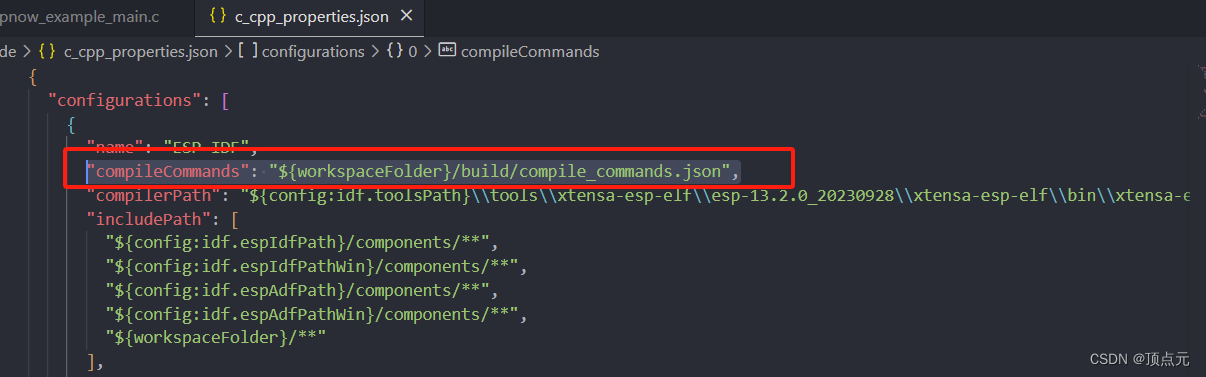
vscode开发ESP32问题记录
vscode 开发ESP32问题记录 1. 解决vscode中的波浪线警告 1. 解决vscode中的波浪线警告 参考链接:https://blog.csdn.net/fucingman/article/details/134404485 首先可以通过vscode 中的IDF插件生成模板工程,这样会自动创建.vscode文件夹中的一些json配…...

效率提升50%:OpenClaw+GLM-4.7-Flash的会议纪要自动化
效率提升50%:OpenClawGLM-4.7-Flash的会议纪要自动化 1. 为什么需要自动化会议纪要 作为技术团队负责人,我每周要参加至少8场会议。过去两年里,我尝试过各种会议纪要工具——从讯飞听见的语音转写,到Notion AI的摘要生成&#x…...

Qwen2.5-72B-GPTQ-Int4开源镜像:Chainlit前端定制化开发入门指南
Qwen2.5-72B-GPTQ-Int4开源镜像:Chainlit前端定制化开发入门指南 想快速搭建一个功能强大、界面美观的AI对话应用吗?今天,我们就来聊聊如何基于Qwen2.5-72B-GPTQ-Int4这个顶级开源大模型,以及Chainlit这个轻量级前端框架…...

如何快速改善论文写作的语言能力?
对于许多非英语母语的科研工作者而言,从实验数据到最终发表,横亘在中间的最大障碍往往不是创新性不足,而是语言表达上的“无力感”。每当完成一篇心血之作,面对屏幕上的文字,内心总充满了自我怀疑:这句话的…...

Kubernetes 与 AI 集成最佳实践
Kubernetes 与 AI 集成最佳实践 一、前言 哥们,别整那些花里胡哨的。Kubernetes 与 AI 集成是现代云原生架构的重要趋势,今天直接上硬货,教你如何在 Kubernetes 中部署和管理 AI 工作负载。 二、AI 工作负载类型 类型特点资源需求训练工作负载…...
)
从需求到SQL:手把手教你将‘住院管理系统’的ER图转化为可运行的数据表(附建表语句)
从需求到SQL:住院管理系统数据库设计实战指南 在医疗信息化快速发展的今天,一套设计良好的住院管理系统数据库不仅能提高医院运营效率,更能为患者提供更精准的医疗服务。本文将带你从零开始,完整实现一个住院病人信息管理系统的数…...

3步打造跨设备开发工作站:code-server全场景部署指南
3步打造跨设备开发工作站:code-server全场景部署指南 【免费下载链接】code-server VS Code in the browser 项目地址: https://gitcode.com/GitHub_Trending/co/code-server 作为开发者,你是否曾面临设备限制带来的开发困境?高性能电…...

本地部署开源推送通知系统 ntfy 并实现外部访问
ntfy 是一款简单、轻量级且功能强大的开源推送通知系统,它的核心目标是让用户或开发者能够轻松地从任何设备、任何地方向自己的手机或桌面发送通知。本文将详细介绍如何在 Linux 系统局域网内部署 ntfy 并结合路由侠实现外网访问局域网内部署的 ntfy 。 第一步&…...

Node.js后端集成GTE-Base-ZH:构建语义化API服务实战
Node.js后端集成GTE-Base-ZH:构建语义化API服务实战 最近在做一个智能文档检索项目,需要处理大量中文文本的语义相似度计算。一开始尝试用传统的TF-IDF,效果总是不尽如人意,直到接触到了GTE-Base-ZH这个专门针对中文优化的文本嵌…...
)
别再说‘差不多’了!搞懂PPM,你的数字电路时钟才算真的稳了(附计算器)
别再说‘差不多’了!搞懂PPM,你的数字电路时钟才算真的稳了(附计算器) 在数字电路设计中,时钟信号如同人体的心跳,其稳定性直接决定了整个系统的可靠性。然而,许多工程师在面对"PPM"这…...
)
微信小程序蓝牙打印中文乱码?手把手教你GBK编码转换(附完整Demo)
微信小程序蓝牙打印中文乱码终极解决方案:从编码原理到完整实现 蓝牙打印机在零售、餐饮等行业的应用越来越广泛,而微信小程序作为轻量级应用平台,与蓝牙打印机的结合为商家提供了便捷的移动打印方案。但在实际开发中,开发者经常会…...