ArduPilot飞控之Gazebo + SITL + MP的Jetson Orin环境搭建
ArduPilot飞控之Gazebo + SITL + MP的Jetson Orin环境搭建
- 1. 源由
- 2. Linux环境整理
- 3. 安装Gazebo环境
- 3.1 安装Gazebo
- 3.2 安装插件
- 3.3 配置插件
- 3.4 测试Gazebo
- 4. 安装Arudpilot-SITL环境
- 4.1 克隆工程
- 4.2 编译准备
- 4.3 环境配置
- 4.4 配置编译
- 4.5 测试运行
- 5. 测试运行
- 6. 参考资料
1. 源由
很简单,希望伴机电脑上天之前先进行相关验证工作,而验证工作希望透过一个测试环境。
之前其实已经有了一个基于Ubuntu22.04 LTS的笔记本Laptop环境,尽管电脑是10年前的老电脑,但是还是基本可以用的。
- ArduPilot飞控之ubuntu22.04-Gazebo模拟
- ArduPilot飞控之ubuntu22.04-SITL安装
- ArduPilot飞控之Mission Planner模拟
为什么要切换到Jetson Orin的主要原因是:
- 需要大量GPU来做视频/图像分析
- 希望能模拟3D飞行环境
- 搭建相对完整环境奠定基础
(MP + Simulator(Jetson Orin) + AI(Jetson Orin) + CC(Companion Computer) + FlightControl(SITL) + RC + FPV)
2. Linux环境整理
Jetson Orin系统安装这里就不再展开,需要了解的朋友,可以详细参考:《Linux 36.2@Jetson Orin Nano之基础环境构建》
这里的更新系统,更多的是需要对系统进行一些软件包上的整理。
$ sudo apt-get update
$ sudo apt-get upgrade
比如:有的时候会出现一些依赖问题,或者多余的安装包,请使用以下指令进行清理。
$ sudo apt-get clean
$ sudo apt-get autoclean
3. 安装Gazebo环境
3.1 安装Gazebo
Gazebo Garden安装
$ sudo wget https://packages.osrfoundation.org/gazebo.gpg -O /usr/share/keyrings/pkgs-osrf-archive-keyring.gpg
$ echo "deb [arch=$(dpkg --print-architecture) signed-by=/usr/share/keyrings/pkgs-osrf-archive-keyring.gpg] http://packages.osrfoundation.org/gazebo/ubuntu-stable $(lsb_release -cs) main" | sudo tee /etc/apt/sources.list.d/gazebo-stable.list > /dev/null
$ sudo apt-get install gz-garden
3.2 安装插件
$ sudo apt install libgz-sim7-dev rapidjson-dev
$ git clone git@github.com:ArduPilot/ardupilot_gazebo.git
$ cd ardupilot_gazebo
$ mkdir build && cd build
$ cmake .. -DCMAKE_BUILD_TYPE=RelWithDebInfo
$ make -j4
3.3 配置插件
$ export GZ_SIM_SYSTEM_PLUGIN_PATH=<ardupilot_gazebo path>/build:$GZ_SIM_SYSTEM_PLUGIN_PATH
$ export GZ_SIM_RESOURCE_PATH=<ardupilot_gazebo path>/models:$HOME/ardupilot_gazebo/worlds:$GZ_SIM_RESOURCE_PATH
or
$ echo 'export GZ_SIM_SYSTEM_PLUGIN_PATH=$HOME/ardupilot_gazebo/build:${GZ_SIM_SYSTEM_PLUGIN_PATH}' >> ~/.bashrc
$ echo 'export GZ_SIM_RESOURCE_PATH=$HOME/ardupilot_gazebo/models:$HOME/ardupilot_gazebo/worlds:${GZ_SIM_RESOURCE_PATH}' >> ~/.bashrc
3.4 测试Gazebo
$ gz sim -v4 -r shapes.sdf
$ gz sim -v4 -r iris_runway.sdf --render-engine ogre
4. 安装Arudpilot-SITL环境
4.1 克隆工程
$ git clone git@github.com:SnapDragonfly/ardupilot.git
$ git checkout Copter-4.5-lida2003
$ git log -n 1
commit b4407356a9193069c7f48b9dfed8785504968fca (HEAD -> Copter-4.5-lida2003, origin/Copter-4.5-lida2003)
Merge: 220478c733 913ec4b29c
Author: Daniel Li <lida_mail@163.com>
Date: Thu Apr 11 07:44:19 2024 +0800Merge branch 'Copter-4.5' into Copter-4.5-lida2003
4.2 编译准备
$ cd ardupilot
$ git submodule update --init --recursive
$ Tools/environment_install/install-prereqs-ubuntu.sh -y
4.3 环境配置
$ pwd
/home/daniel/ardupilot$ export PATH=$PATH:<ardupilot path>/Tools/autotest
$ export PATH=/usr/lib/ccache:$PATH$ . ~/.profile
4.4 配置编译
$ ./waf configure --board sitl # software-in-the-loop simulator
or
$ ./waf configure --board sitl --debug # software-in-the-loop simulator with debug symbols
$ ./waf
4.5 测试运行
第一次测试运行,清理虚拟EEPROM参数
$ sim_vehicle.py -w -v ArduCopter
加载默认参数后,正常启动SITL模拟器
$ sim_vehicle.py --console --map -v ArduCopter
or
$ sim_vehicle.py --console --map -v ArduCopter --custom-location=30.218788,120.092316,281,90
5. 测试运行
-
十里琅珰模拟飞行:BF飞行路线:BetaFlight Mark4 + 十里琅珰 + ELRS3.0 + 500mW_Dyn
-
Jetson Orin运行起飞点模拟命令
$ sim_vehicle.py --console --map -v ArduCopter --custom-location=30.3051391,120.1556749,8.71000003814697,90
-
MissionPlanner 连接 TCP端口5763
-
视频将Jetson Orin上的Map地图和MissionPlanner组合叠加显示
Jetson Orin(Gazebo + Ardupilot 4.5.1SITL) + MissionPlanner
整体来看效果不错,后面看看能否将3D环境也加进来,后续可以模拟障碍物中飞行。
6. 参考资料
【1】ArduPilot开源飞控系统之简单介绍
【2】PX4模块设计之一:SITL & HITL模拟框架
【3】PX4模块设计之七:Ubuntu 20.04搭建Gazebo模拟器
【4】PX4模块设计之八:Ubuntu 20.04搭建FlightGear模拟器
【5】PX4开发环境搭建–模拟器编译及QGroundControl & RC遥控模拟配置
【6】ArduPilot开源飞控之MAVProxy简介
相关文章:

ArduPilot飞控之Gazebo + SITL + MP的Jetson Orin环境搭建
ArduPilot飞控之Gazebo SITL MP的Jetson Orin环境搭建 1. 源由2. Linux环境整理3. 安装Gazebo环境3.1 安装Gazebo3.2 安装插件3.3 配置插件3.4 测试Gazebo 4. 安装Arudpilot-SITL环境4.1 克隆工程4.2 编译准备4.3 环境配置4.4 配置编译4.5 测试运行 5. 测试运行6. 参考资料 1…...

前端错误监控的方法有哪些
前端错误监控是指通过各种手段收集、分析和处理前端应用运行中发生的错误 常用的前端错误监控的方法有 使用 try catch 方法 捕获特定代码块中的错误多用于处理特定函数或代码段可能抛出的异常,尤其是异步代码网络请求错误监控 promise.catchtry catch全局错误处理…...
✌粤嵌—2024/3/11—跳跃游戏
代码实现: 方法一:递归记忆化 int path; int used[10000];bool dfs(int *nums, int numsSize) {if (path numsSize - 1) {return true;}for (int i 1; i < nums[path]; i) {if (used[path i]) {continue;}path i;used[path] 1;if (dfs(nums, num…...
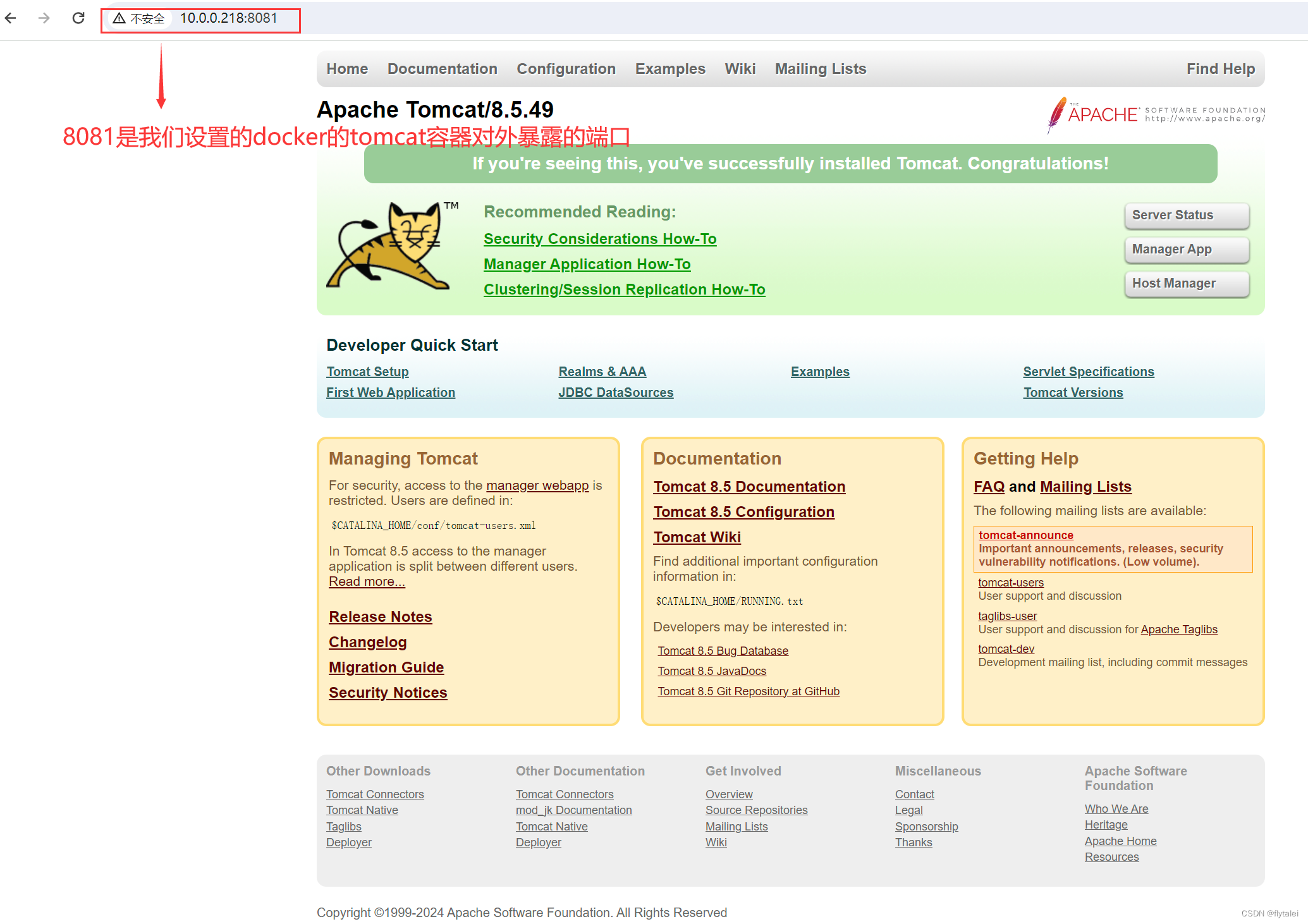
Docker入门实战教程
文章目录 Docker引擎的安装Docker比vm虚拟机快 Docker常用命令帮助启动类命令镜像命令docker imagesdocker searchdocker pulldocker system dfdocker rmi 容器命令redis前台交互式启动redis后台守护式启动Nginx容器运行ubuntu交互式运行tomcat交互式运行对外暴露访问端口 Dock…...
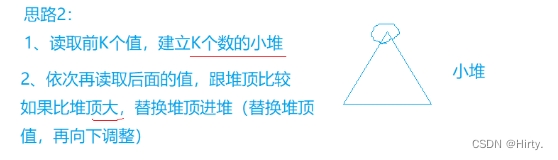
数据结构初阶:二叉树(一)
树概念及结构 树的概念 树是一种 非线性 的数据结构,它是由 n ( n>0 )个有限结点组成一个具有层次关系的集合。 把它叫做树是因 为它看起来像一棵倒挂的树,也就是说它是根朝上,而叶朝下的 。 有一个特殊的结点&a…...
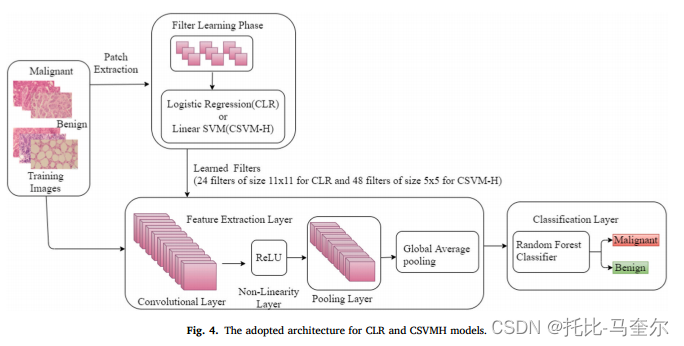
基于逻辑回归和支持向量机的前馈网络进行乳腺癌组织病理学图像分类
CNN(卷积神经网络)通过使用反向传播方法来学习特征,这种方法需要大量的训练数据,并且存在梯度消失问题,从而恶化了特征学习。 CNN卷积神经网络 CNN由一个多层神经网络组成,该网络从标记的训练数据集中学习…...

35-4 fastjson漏洞复现
环境准备:35-2 fastjson反序列化漏洞介绍 及漏洞环境搭建-CSDN博客 fastjson_tool.jar下载:fastjson_rce_tool: fastjson命令执行自动化利用工具, remote code execute,JNDI服务利用工具 RMI/LDAP (gitee.com) 一、攻击机kali开启nc监听6666端口(或其他端口也行,只要不…...

Qt-控件篇
QPushbutton 1、设置按钮文本 pushButton->setText("按钮"); 2、获取按钮文本 pushButton->text(); 3、设置按钮的大小为特定值(宽度和高度) pushButton->setFixedSize(width,height); 4、设置按钮悬停时的工具提示文本。 pushButto…...

实现 Table 的增加和删除,不依赖后端数据回显
需求 删除前 删除后 分析 首先写一个 Table <a-card style"width:100%"><template#extra><a-button type"text" click"addSelectItem" style"margin-right: 5px">添加</a-button><a-button type&quo…...
——三系统后端nodejs+express)
个人网站开发记录(七)——三系统后端nodejs+express
前言 这种已经完全工程化了的()后端其实已经没啥好说的了,因为就是单纯的写接口然后调用接口就完事了! 正文 唯一值得一提的大概是我在写这个系统的时候搞了https的链接,具体来说就是先申请一个ssl证书,…...

C#入门理解设计模式的6大原则
**设计模式的原则是指导设计模式创建和应用的基本原则,这些原则有助于创建灵活、可维护且可扩展的软件系统。**1. 单一职责原则(Single Responsibility Principle, SRP) 单一职责原则指出一个类应该只有一个引起它变化的原因。换句话说&…...

Linux如何切换root用户
Linux如何切换root用户 sudosudo -i想一直使用root权限,可以使用su命令 sudo 执行命令后,输入用户密码可以短暂的获取root权限 sudo -i 通过此命令直接输入当前管理员用户的密码就可以进入root用户了 想一直使用root权限,可以使用su命令 …...

uniapp小程序编译报错
说明 微信小程序编译每次都出现[ project.config.json 文件内容错误] project.config.json: libVersion 字段需为 string, 解决 找到manifest.json文件 添加:"libVersion": "latest",重新编译即可。...

van-uploader 在app内嵌的webview中的一些坑
问题: 部分版本在ios 中没有问题,但是安卓中不触发图片选择和拍照(之前是可以的,可能是没有锁定版本,重新发版导致的)。在ios中下拉文案是英文,html配置lang等于 zh 也没有用,ios里…...

使用Kotlin进行全栈开发 Ktor+Kotlin/JS
首发于Enaium的个人博客 前言 本文将介绍如何使用 Kotlin 全栈技术栈KtorKotlin/JS来构建一个简单的全栈应用。 准备工作 创建项目 首先我们需要创建一个Kotlin项目,之后继续在其中新建两个子项目,一个是Kotlin/JS项目,另一个是Ktor项目。…...

数据结构_带头双向循环链表
List.h 相较于之前的顺序表和单向链表,双向链表的逻辑结构稍微复杂一些,但是在实现各种接口的时候是很简单的。因为不用找尾,写起来会舒服一点。(也可能是因为最近一直在写这个的原因) #pragma once #include<std…...

常见的垃圾回收器(下)
文章目录 G1ShenandoahZGC 常见垃圾回收期(上) G1 参数1: -XX:UseG1GC 打开G1的开关,JDK9之后默认不需要打开 参数2:-XX:MaxGCPauseMillis毫秒值 最大暂停的时间 回收年代和算法 ● 年轻代老年代 ● 复制算法 优点…...

网桥的原理
网桥的原理 1.1 桥接的概念 简单来说,桥接就是把一台机器上的若干个网络接口“连接”起来,其结果是,其中一个网口收到的报文会被复制给其他网口并发送出去。以使得网口之间的报文能够互相转发。 交换机有若干个网口,并且这些…...

STM32 CAN过滤器细节
STM32 CAN过滤器细节 简介 每组筛选器包含2个32位的寄存器,分别为CAN_FxR1和CAN_FxR2,它们用来存储要筛选的ID或掩码 四种模式 模式说明32位掩码模式CAN_FxR1存储ID, CAN_FxR2存储哪个位必须要与CAN_FxR1中的ID一致 , 2个寄存器…...
网络编程(现在不重要)
目录 网络编程三要素与InetAddress类的使用 软件架构 面临的主要问题 网络编程三要素(对应三个问题) InetAddress的使用 TCP与UDP协议剖析与TCP编程案例(了解) TCP协议 UDP协议 例子 UDP、URL网络编程 URL:&…...
)
从键盘到5G模组:深入浅出聊聊USB那些五花八门的‘设备类’(HID/CDC/MSC)
从键盘到5G模组:深入浅出聊聊USB那些五花八门的‘设备类’(HID/CDC/MSC) 当你在键盘上敲下字符、用U盘拷贝文件,或是通过4G模块联网时,背后都有一群看不见的"协议翻译官"在忙碌——它们就是USB设备类&#x…...

如何高效采集直播数据:微信视频号监控工具的完整实战指南
如何高效采集直播数据:微信视频号监控工具的完整实战指南 【免费下载链接】wxlivespy 微信视频号直播间弹幕信息抓取工具 项目地址: https://gitcode.com/gh_mirrors/wx/wxlivespy 在直播电商时代,掌握实时互动数据已成为提升直播效果的关键。你是…...
)
JY901陀螺仪数据解析实战:从原始字节到工程可用的姿态角(附完整代码)
JY901陀螺仪数据解析实战:从原始字节到工程可用的姿态角(附完整代码) 在嵌入式开发中,姿态感知是实现自动平衡、导航定位等功能的基石。JY901作为一款高性价比的9轴运动传感器,其输出的原始数据需要经过精确解析才能转…...

im2col算法实现:从原理到代码的逐行剖析
1. im2col算法原理揭秘 想象你正在整理一副扑克牌,需要把相邻的几张牌快速组合起来。im2col算法的核心思想与此类似——它将图像中相邻的像素区域重新排列成矩阵的列,从而将卷积运算转化为高效的矩阵乘法。这个"image to column"的转换过程&am…...

网盘直链解析工具完整指南:跨平台文件获取解决方案
网盘直链解析工具完整指南:跨平台文件获取解决方案 【免费下载链接】Online-disk-direct-link-download-assistant 一个基于 JavaScript 的网盘文件下载地址获取工具。基于【网盘直链下载助手】修改 ,支持 百度网盘 / 阿里云盘 / 中国移动云盘 / 天翼云盘…...

AI代理如何革新领导力评估:从隐藏档案任务到低成本高效测量
1. 项目概述:当AI成为你的“面试官”,领导力评估正在发生什么?如果你是一位人力资源总监,或者是一位正在为团队选拔继任者而头疼的部门负责人,那么下面这个场景你一定不陌生:为了评估一个候选人的真实领导潜…...

构建工业级电力通信系统的终极指南:libiec61850开源库深度解析
构建工业级电力通信系统的终极指南:libiec61850开源库深度解析 【免费下载链接】libiec61850 Official repository for libIEC61850, the open-source library for the IEC 61850 protocols 项目地址: https://gitcode.com/gh_mirrors/li/libiec61850 在现代…...

Naftis架构设计原理:从Golang后端到React前端的完整技术栈
Naftis架构设计原理:从Golang后端到React前端的完整技术栈 【免费下载链接】naftis An awesome dashboard for Istio built with love. 项目地址: https://gitcode.com/gh_mirrors/na/naftis Naftis是一款专为Istio服务网格设计的现代化Web仪表板,…...

还在手动找媒体发稿?看我们团队如何用AI工具把宣发效率提升300%
大家好,我是某互联网公司的技术负责人老王。最近团队上线了一个新项目,市场部的同事跑来问我,能不能帮忙解决下媒介宣发的问题。他们说,每次发个新闻稿或者产品软文,都得一个个去联系媒体、求小编,价格不透…...

NotebookLM API接入倒计时:GCP项目配额收紧前,必须完成的4步合规配置与审计清单
更多请点击: https://intelliparadigm.com 第一章:NotebookLM API开发接入 NotebookLM 是 Google 推出的面向研究与知识管理的 AI 笔记工具,其官方尚未开放公开 API,但通过逆向分析 Web 客户端通信及社区验证的认证流程ÿ…...