Isaac Sim 3(学习笔记5.8)
Isaac Sim 利用深度学习获取mask掩码图
参考内容
Kubernetes官网
在 Linux 系统中安装并设置 kubectl | Kubernetes准备开始 kubectl 版本和集群版本之间的差异必须在一个小版本号内。 例如:v1.30 版本的客户端能与 v1.29、 v1.30 和 v1.31 版本的控制面通信。 用最新兼容版的 kubectl 有助于避免不可预见的问题。在 Linux 系统中安装 kubectl 在 Linux 系统中安装 kubectl 有如下几种方法:用 curl 在 Linux 系统中安装 kubectl 用原生包管理工具安装 用其他包管理工具安装 用 curl 在 Linux 系统中安装 kubectl 用以下命令下载最新发行版:x86-64 ARM64 curl -LO "https://dl.k8s.io/release/$(curl -L -s https://dl.k8s.io/release/stable.txt)/bin/linux/amd64/kubectl" curl -LO "https://dl.k8s.io/release/$(curl -L -s https://dl.k8s.io/release/stable.txt)/bin/linux/arm64/kubectl" 说明: 如需下载某个指定的版本,请用指定版本号替换该命令的这一部分: $(curl -L -s https://dl.k8s.io/release/stable.txt)。例如,要在 Linux x86-64 中下载 1.30.0 版本,请输入:curl -LO https://dl.k8s.io/release/v1.30.0/bin/linux/amd64/kubectl 对于 Linux ARM64 来说,请输入:![]() https://kubernetes.io/zh-cn/docs/tasks/tools/install-kubectl-linux/使用Isaac Sim进行DNN图像分割教程
https://kubernetes.io/zh-cn/docs/tasks/tools/install-kubectl-linux/使用Isaac Sim进行DNN图像分割教程
Tutorial for DNN Image Segmentation with Isaac Sim — isaac_ros_docs documentation![]() https://nvidia-isaac-ros.github.io/concepts/segmentation/unet/tutorial_isaac_sim.html设置开发环境等
https://nvidia-isaac-ros.github.io/concepts/segmentation/unet/tutorial_isaac_sim.html设置开发环境等
isaac_ros_unet — isaac_ros_docs documentation![]() https://nvidia-isaac-ros.github.io/repositories_and_packages/isaac_ros_image_segmentation/isaac_ros_unet/index.html#quickstartDeveloper Environment Setup — isaac_ros_docs documentation
https://nvidia-isaac-ros.github.io/repositories_and_packages/isaac_ros_image_segmentation/isaac_ros_unet/index.html#quickstartDeveloper Environment Setup — isaac_ros_docs documentation![]() https://nvidia-isaac-ros.github.io/getting_started/dev_env_setup.html安装NVIDIA容器工具包
https://nvidia-isaac-ros.github.io/getting_started/dev_env_setup.html安装NVIDIA容器工具包
Installing the NVIDIA Container Toolkit — NVIDIA Container Toolkit 1.15.0 documentation![]() https://docs.nvidia.com/datacenter/cloud-native/container-toolkit/latest/install-guide.html#prerequisites
https://docs.nvidia.com/datacenter/cloud-native/container-toolkit/latest/install-guide.html#prerequisites
一.设置Docker、安装NVIDIA工具包、容器部署
这里我在别的地方写过,在下方链接的第二章内容中
Ubuntu20.04 ISAAC SIM仿真下载使用流程_ubuntu启动isaac sim后一直有rtx loading界面-CSDN博客文章浏览阅读1.4k次,点赞38次,收藏30次。Ubuntu20.04 ISAAC SIM仿真下载使用流程机器:华硕天选X2024显卡:4060Tiubuntu20.04安装显卡驱动版本:525.85.05_ubuntu启动isaac sim后一直有rtx loading界面https://blog.csdn.net/weixin_61044335/article/details/137866781?spm=1001.2014.3001.5501说实在的我不知道为什么nvidia不同文档写的下载的内容不一样,哪个是必要,哪个是不必要也不清晰,没办法我先把以前做过的东西放在这儿,我再去跟着官网走一遍捋一捋
二.跟着官网再走一次
我因为想拿到图像分割的掩码,于是跟着官网走Tutorial for DNN Image Segmentation with Isaac Sim — isaac_ros_docs documentation
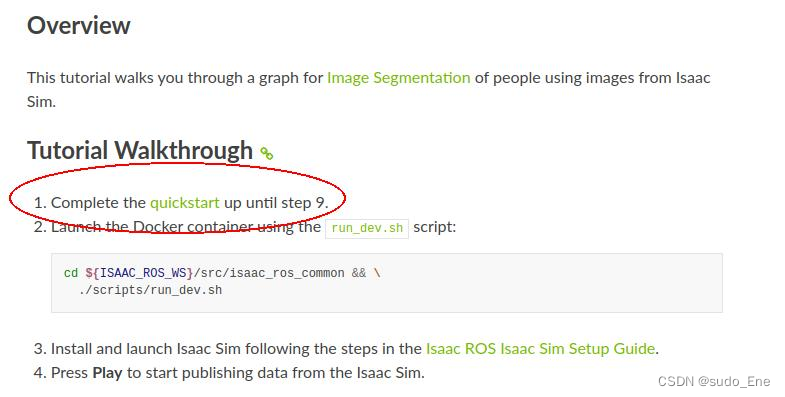
提示要先完成isaac_ros_unet — isaac_ros_docs documentation 中1~9的内容,于是我又去这个网站

这里又要我根据 Developer Environment Setup — isaac_ros_docs documentation 说明来设置开发环境,好吧继续
在上文链接中我已经配置好了docker,继续走下一步
接下来是https://nvidia-isaac-ros.github.io/getting_started/dev_env_setup.html中的环境设置部分:
-
On x86_64 platforms:
-
Install the
nvidia-container-toolkitusing the instructions. -
Configure
nvidia-container-toolkitfor Docker using the instructions.
On Jetson platforms: Follow this instruction to first set your Jetson up with SSD, then come back to this document and resume from Step 2.
-
-
Restart Docker:
sudo systemctl daemon-reload && sudo systemctl restart docker -
Install Git LFS to pull down all large files:
sudo apt-get install git-lfsgit lfs install --skip-repo -
Create a ROS 2 workspace for experimenting with Isaac ROS:
For Jetson setup with SSD as optional storage:
mkdir -p /ssd/workspaces/isaac_ros-dev/src echo "export ISAAC_ROS_WS=/ssd/workspaces/isaac_ros-dev/" >> ~/.bashrc source ~/.bashrc
mkdir -p ~/workspaces/isaac_ros-dev/src echo "export ISAAC_ROS_WS=${HOME}/workspaces/isaac_ros-dev/" >> ~/.bashrc source ~/.bashrcWe expect to use the
ISAAC_ROS_WSenvironmental variable to refer to this ROS 2 workspace directory, in the future.
To further customize your development environment, check out this guide.
很好走完了,接下来去做图像分割的前置步骤:
-
Clone
isaac_ros_commonand this repository under${ISAAC_ROS_WS}/src.cd ${ISAAC_ROS_WS}/srcgit clone https://github.com/NVIDIA-ISAAC-ROS/isaac_ros_common.git
git clone https://github.com/NVIDIA-ISAAC-ROS/isaac_ros_image_segmentation.git
-
Pull down a ROS Bag of sample data:
cd ${ISAAC_ROS_WS}/src/isaac_ros_image_segmentation && \git lfs pull -X "" -I "resources/rosbags/" -
Launch the Docker container using the
run_dev.shscript:cd ${ISAAC_ROS_WS}/src/isaac_ros_common && \./scripts/run_dev.sh -
Install this package’s dependencies.
sudo apt-get install -y ros-humble-isaac-ros-unet ros-humble-isaac-ros-triton ros-humble-isaac-ros-dnn-image-encoder
-
Download the
PeopleSemSegNet ShuffleSegETLT file and theint8inference mode cache file:mkdir -p /tmp/models/peoplesemsegnet_shuffleseg/1 && \cd /tmp/models/peoplesemsegnet_shuffleseg && \wget https://api.ngc.nvidia.com/v2/models/nvidia/tao/peoplesemsegnet/versions/deployable_shuffleseg_unet_v1.0/files/peoplesemsegnet_shuffleseg_etlt.etlt && \wget https://api.ngc.nvidia.com/v2/models/nvidia/tao/peoplesemsegnet/versions/deployable_shuffleseg_unet_v1.0/files/peoplesemsegnet_shuffleseg_cache.txt
-
Convert the ETLT file to a TensorRT plan file:
/opt/nvidia/tao/tao-converter -k tlt_encode -d 3,544,960 -p input_2:0,1x3x544x960,1x3x544x960,1x3x544x960 -t int8 -c peoplesemsegnet_shuffleseg_cache.txt -e /tmp/models/peoplesemsegnet_shuffleseg/1/model.plan -o argmax_1 peoplesemsegnet_shuffleseg_etlt.etlt
-
Create a file called
/tmp/models/peoplesemsegnet_shuffleseg/config.pbtxtby copying the sample Triton config file:cp /workspaces/isaac_ros-dev/src/isaac_ros_image_segmentation/resources/peoplesemsegnet_shuffleseg_config.pbtxt /tmp/models/peoplesemsegnet_shuffleseg/config.pbtxt
-
Run the following launch files to spin up a demo of this package:
ros2 launch isaac_ros_unet isaac_ros_unet_triton.launch.py model_name:=peoplesemsegnet_shuffleseg model_repository_paths:=['/tmp/models'] input_binding_names:=['input_2:0'] output_binding_names:=['argmax_1'] network_output_type:='argmax' input_image_width:=1200 input_image_height:=632
Then open another terminal, and enter the Docker container again:
cd ${ISAAC_ROS_WS}/src/isaac_ros_common && \./scripts/run_dev.shThen, play the ROS bag:
ros2 bag play -l src/isaac_ros_image_segmentation/resources/rosbags/unet_sample_data/
-
Visualize and validate the output of the package by launching
rqt_image_viewin another terminal: In a third terminal, enter the Docker container again:cd ${ISAAC_ROS_WS}/src/isaac_ros_common && \./scripts/run_dev.shThen launch
rqt_image_view:ros2 run rqt_image_view rqt_image_view
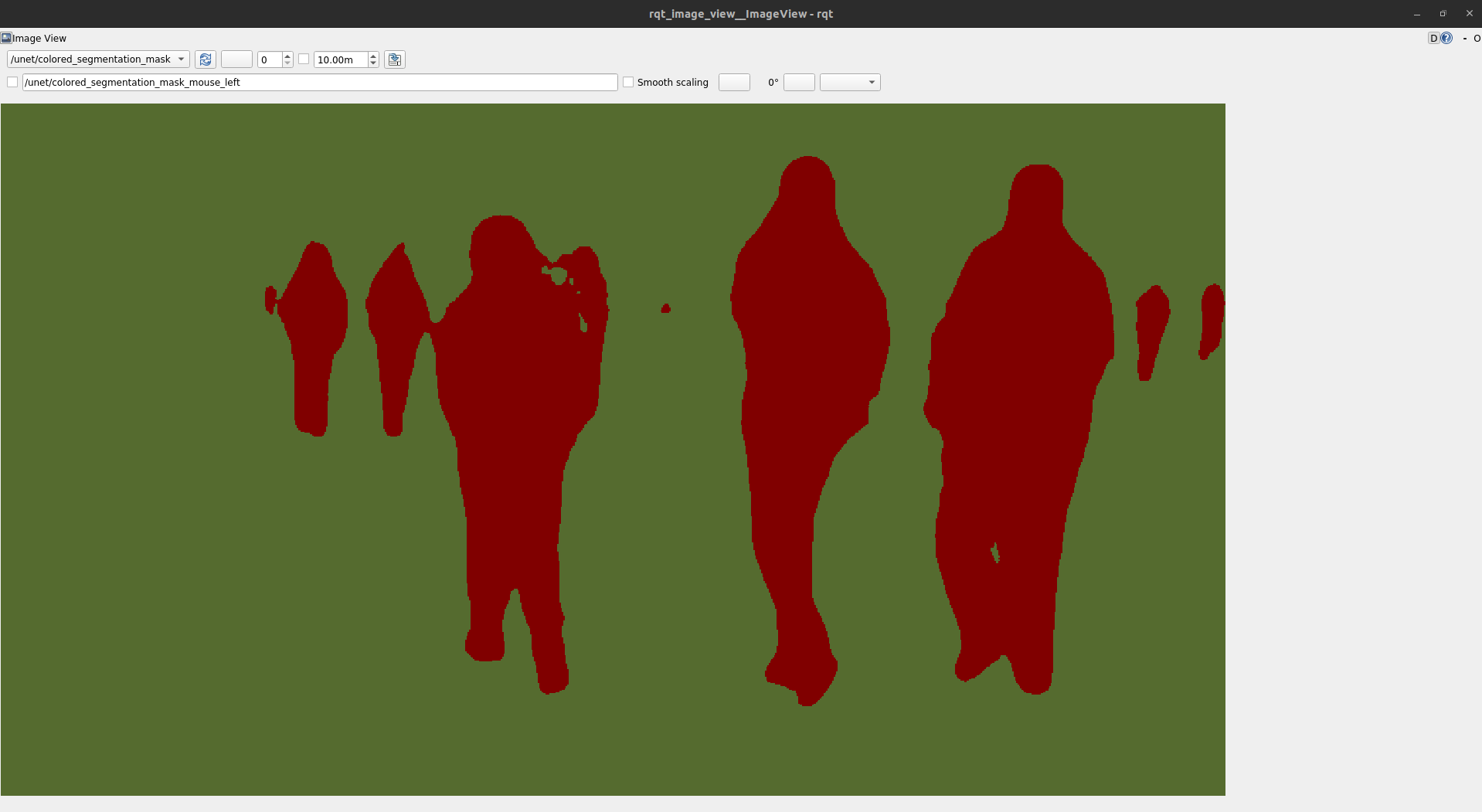
Then inside the
rqt_image_viewGUI, change the topic to/unet/colored_segmentation_maskto view a colorized segmentation mask.
相关文章:
Isaac Sim 3(学习笔记5.8)
Isaac Sim 利用深度学习获取mask掩码图 参考内容 Kubernetes官网 在 Linux 系统中安装并设置 kubectl | Kubernetes准备开始 kubectl 版本和集群版本之间的差异必须在一个小版本号内。 例如:v1.30 版本的客户端能与 v1.29、 v1.30 和 v1.31 版本的控制面通信。 用…...

对象定义成final类型还能改变吗
如果一个Java对象被定义为final类型,那么它的引用不能被改变,但是对象本身的状态仍然可以被修改。这意味着你可以改变final对象的属性,但是不能将其引用指向另一个对象。 例如,下面的代码中,虽然person对象被声明为fi…...

Vue Router 路由hash和history模式
文章目录 hash和history模式区别Hash 模式History 模式 在 Vue 中,路由的两种主要模式是 hash 和 history,默认的路由模式是hash模式。。这两种模式决定了 URL 的外观以及浏览器如何处理 URL 的变化。 hash和history模式区别 特性Hash 模式History 模…...

【xrframe】优化ar相机中加载模型效果
方法一:定义渲染width和height //组件生命周期:在视图层布局完成后执行ready() {const info wx.getSystemInfoSync();//在小程序中同步获取系统信息const width info.windowWidth;//获取屏幕的宽度(单位为物理像素)const heigh…...
解决 SyntaxError: Unexpected token ‘.‘ 报错问题
这个报错一般是编译问题,浏览器的版本过低没通过代码 解决办法: 在package.json文件中加上这个 "browserslist": ["> 1%","last 2 versions","not dead","not ie < 6","Android > 4&…...

谷歌插件V3知识点
1.background.js与content.js与popup.js对比: background.js 生命周期:一开始就执行,最早执行且一直执行; 作用:放置全局的、需要一直运行的代码,权限非常高几乎调用所有Chrome api,还可以发起跨域请求; content.js 生…...

webrtc windows 编译,以及peerconnection_client
webrtc windows环境编译,主要参考webrtc官方文档,自备梯子 depot tools 安装 Install depot_tools 因为我用的是windows,这里下载bundle 的安装包,然后直接解压,最后设置到环境变量PATH。 执行gn等命令不报错&…...

geotrust企业通配符证书2990
随着时代的变化,人们获取信息的方式由报纸、书籍变为手机、电脑,因此很多企事业单位用户开始在互联网中创建网站来进行宣传,吸引客户。为了维护网站安全环境,保护客户数据,企事业单位也开始使用SSL数字证书,…...

网络安全科普:保护你的数字生活
# 网络安全科普:保护你的数字生活 ## 引言 在数字化时代,网络安全已成为每个人都必须面对的问题。从个人隐私保护到金融交易安全,网络的安全性直接关系到我们的日常生活。因此,普及网络安全知识,提高公众的网络安全意…...

Java实战:递归查找指定后缀名的文件
在日常的软件开发中,经常需要处理文件操作。假设我们有一个需求:从一个包含大量JSON文件的文件夹中提取出所有的JSON文件以进行进一步处理。本文将介绍如何利用Java编写一个高效的方法来递归查找指定后缀名的文件。 代码实现: import java.i…...
Linux 操作系统网络编程1
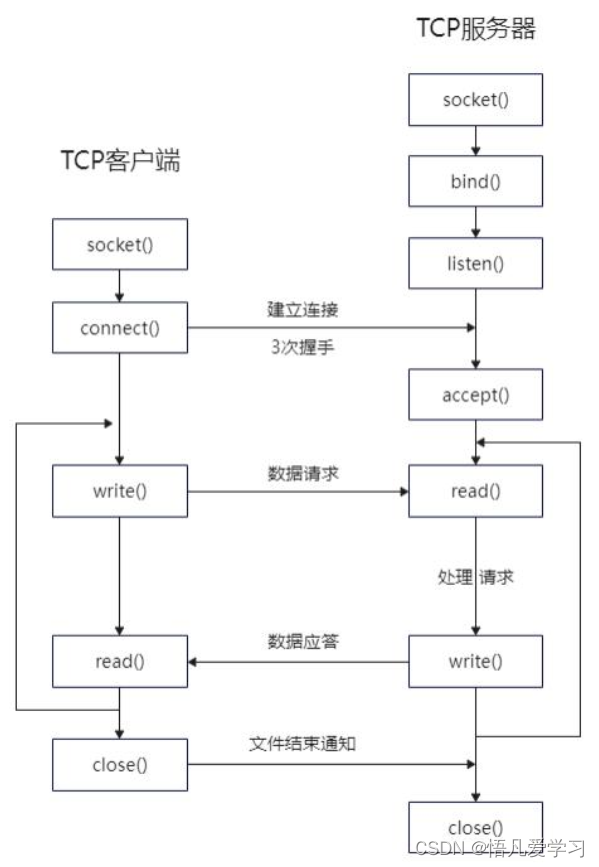
目录 1、网络编程 1.1 OSI 网络七层模型 1.1.1 OSI 参考模型 1.1.2 网络数据传输过程 2 传输层通信协议 2.1 TCP 2.1.1 TCP的3次握手过程 2.1.2 TCP四次挥手过程 2.2 UDP 3 网络编程的IP地址 4 端口 5 套接字 1、网络编程 1.1 OSI 网络七层模型 1.1.1 OSI 参考模型…...
成员、shared_future)
future wait_for()成员、shared_future
future wait_for()成员 wait_for():等待其异步操作操作完成或者超出等待,用于检查异步操作的状态。wait_for()可以接受一个std::chrono::duration类型的参数,它表示等待的最大时间,会返回一个std::future_status枚举值࿰…...
C++ list介绍(迭代器失效)
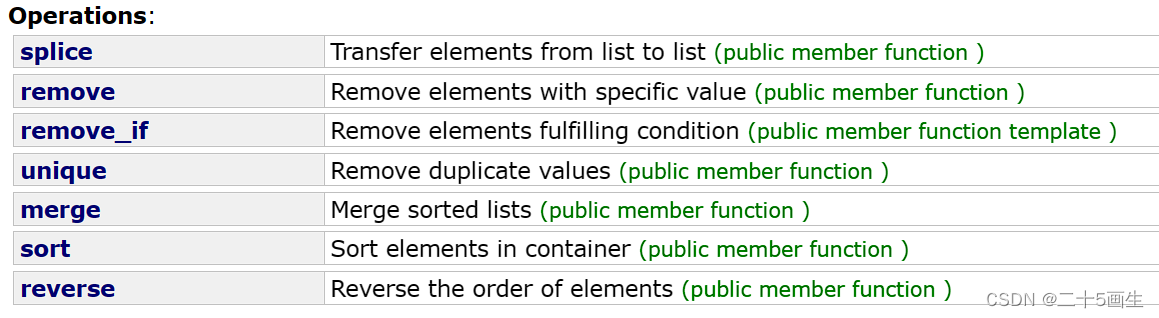
一、常用接口 reverse逆置 sort排序(默认升序) 仿函数greater<int> merge合并,可以全部合并,也可以一部分合并 unique:去重(先排序,再去重) remove:删除e值&#…...

codeforces 1809C
很巧妙的构造 题目链接 题目大意 要求构造长度为 n n n的数组满足以下条件 任意 i i i, − 1000 < a [ i ] < 1000 -1000<a[i]<1000 −1000<a[i]<1000有 k k k个和为正数的子串其余子串和为负数 思路 我们发现与子数组内元素的和有关&…...
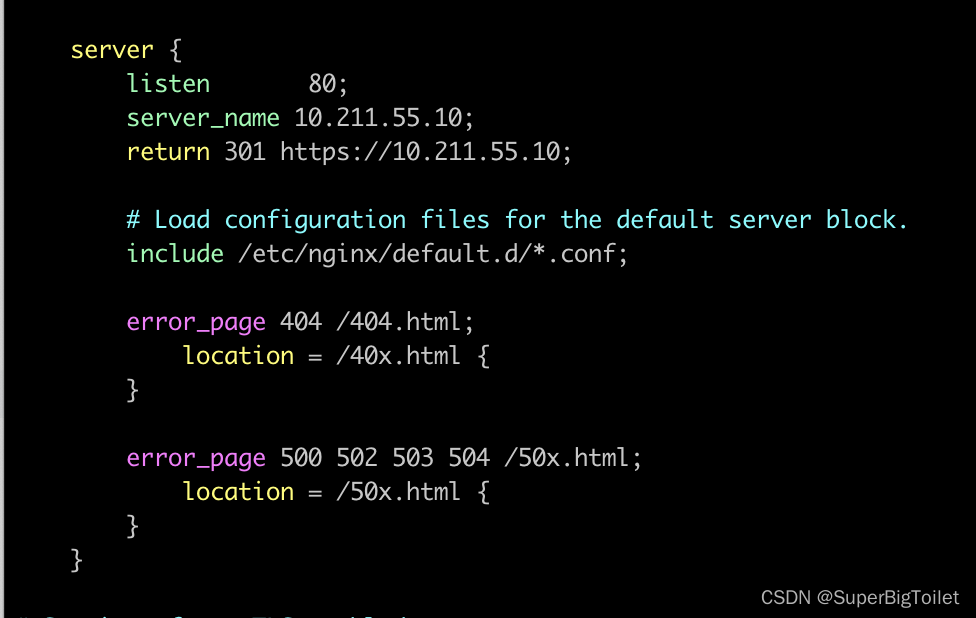
Nginx part3 创建一个https的网站
目录 HTTPS 公钥和密钥 加密解密方式: https搭建步骤 强调一下 1、准备环境 2、配置文件 3、制作证书 4、进行设置 HTTPS 啥是https,根据百度:HTTPS (全称:Hypertext Transfer Protocol Secure)&a…...
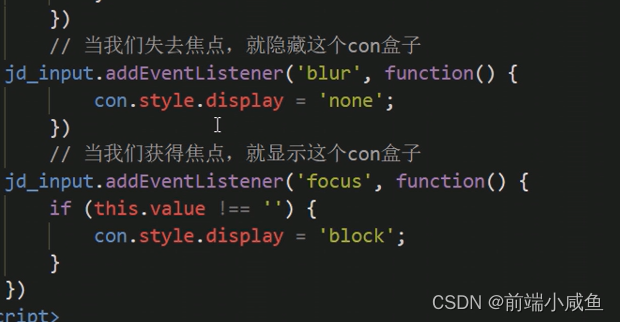
事件高级。
一、注册事件(绑定事件) 就是给元素添加事件 注册事件有两种方式:传统方式和方法监听注册方式 1 传统注册方式 方法监听注册事件 2、 addEventListener 事件监听方式 里面的事件类型是字符串,必定加引号,而且不带o…...

Vue从入门到实战Day04
一、组件的三大组成部分(结构/样式/逻辑) 1. scoped样式冲突 默认情况:写在组件中的样式会全局生效 -> 因此很容易造成多个组件之间的样式冲突问题。 1. 全局样式:默认组件中的样式会作用到全局 2. 局部样式:可以…...
Linux学习笔记:信号
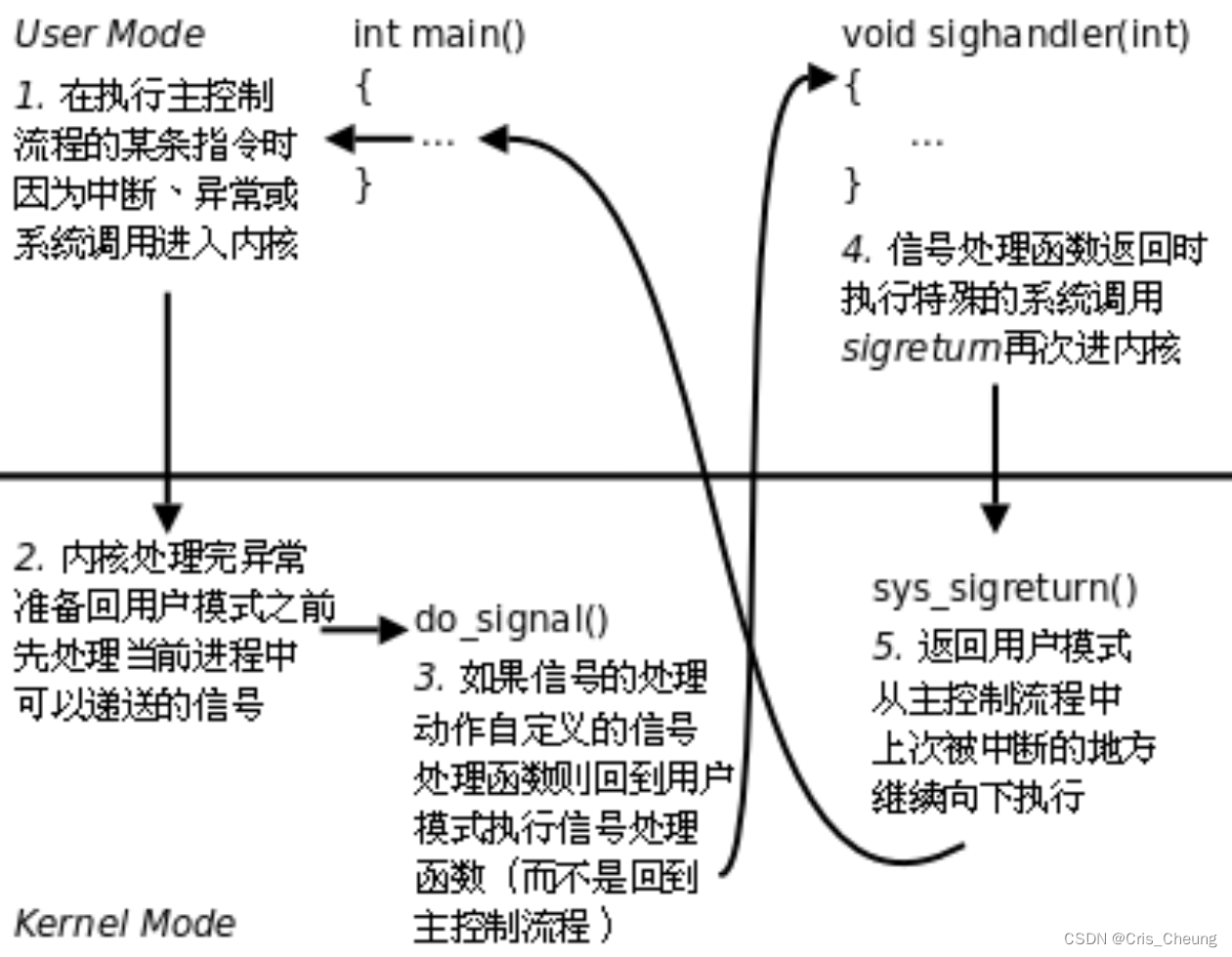
信号 在Linux中什么是信号信号的产生方式硬件产生的信号软件产生的信号异常产生的信号 进程对信号的处理信号的保存信号方法更改函数signal信号处理的更改恢复默认信号忽略 信号的管理信号集 sigset_t对信号集的操作 信号的捕捉过程 在Linux中什么是信号 在 Linux 系统中&…...

C#中的隐式类型转换和显式类型转换
在C#中,类型转换分为隐式类型转换(Implicit Type Conversion)和显式类型转换(Explicit Type Conversion),也称为隐式转换和强制转换。 隐式类型转换(Implicit Type Conversion) 隐…...

linux上如何排查JVM内存过高?
在Linux上排查JVM内存过高的问题,可以采用以下几种方法: 1. **使用top命令查看进程**:通过top命令可以观察到系统中资源占用情况,包括CPU和内存。当收到内存过高的报警时,可以使用top命令来查看是哪个进程的内存使用率…...

毕业答辩结束了,但我后悔没早点知道这件事
毕业答辩是学子学术生涯的收官之战,而答辩PPT则是学术成果的“可视化名片”,其逻辑清晰度、重点突出度与专业呈现力,直接影响答辩的最终走向。对多数学子而言,论文定稿后,PPT制作往往成为新的焦虑源泉:要么…...

BooruDatasetTagManager自定义界面与快捷键:打造个性化工作流程的终极指南 [特殊字符]
BooruDatasetTagManager自定义界面与快捷键:打造个性化工作流程的终极指南 🎨 【免费下载链接】BooruDatasetTagManager 项目地址: https://gitcode.com/gh_mirrors/bo/BooruDatasetTagManager BooruDatasetTagManager是一款强大的AI训练数据标签…...

5大技术突破:Unity Figma Bridge如何革命性改变游戏UI开发流程
5大技术突破:Unity Figma Bridge如何革命性改变游戏UI开发流程 【免费下载链接】UnityFigmaBridge Easily bring your Figma Documents, Components, Assets and Prototypes to Unity 项目地址: https://gitcode.com/gh_mirrors/un/UnityFigmaBridge Unity F…...

2026年京东云OpenClaw/Hermes Agent配置Token Plan部署详细教程
2026年京东云OpenClaw/Hermes Agent配置Token Plan部署详细教程。OpenClaw是开源的个人AI助手,Hermes Agent则是一个能自我进化的AI智能体框架。阿里云提供计算巢、轻量服务器及无影云电脑三种部署OpenClaw 与 Hermes Agent的方案、百炼Token Plan兼容主流 AI 工具&…...

CANN/asc-devkit队列屏障API
QueueBarrier 【免费下载链接】asc-devkit 本项目是CANN 推出的昇腾AI处理器专用的算子程序开发语言,原生支持C和C标准规范,主要由类库和语言扩展层构成,提供多层级API,满足多维场景算子开发诉求。 项目地址: https://gitcode.c…...

深度解析XGBoost环境配置:从零构建高性能梯度提升库
深度解析XGBoost环境配置:从零构建高性能梯度提升库 【免费下载链接】xgboost Scalable, Portable and Distributed Gradient Boosting (GBDT, GBRT or GBM) Library, for Python, R, Java, Scala, C and more. Runs on single machine, Hadoop, Spark, Dask, Flink…...

端侧AI算力瓶颈与优化企业格局解析
一、引言:端侧AI的发展困境与研究核心1.1 端侧AI的产业价值与普及现状端侧AI作为边缘计算的核心落地形态,正深度渗透工业制造、智能终端、车载电子、安防监控等领域。据IDC数据,2025年全球端侧AI芯片市场规模突破180亿美元,工业端…...

LeetCode 数据流中第K大元素题解
LeetCode 数据流中第K大元素题解 题目描述 设计一个数据流,找到数据流中第 k 大的元素。 示例: 输入:k 3, arr [4,6,5]输出:5 解题思路 方法:堆 思路: 使用最小堆维护前 k 大的元素。遍历数据流ÿ…...

FreeRTOS-Plus-TCP vs LwIP:在GD32F450上如何选择?附LAN8720A驱动避坑指南
FreeRTOS-Plus-TCP与LwIP在GD32F450上的深度对比与实战选型指南 当工程师在资源受限的GD32F450平台上构建网络功能时,FreeRTOS-Plus-TCP和LwIP这两个轻量级TCP/IP协议栈往往成为主要候选。本文将基于实际项目经验,从内存占用、性能表现、开发效率等维度进…...
)
告别手动挖洞:用Netsparker自动化扫描你的Web应用(附实战报告解读)
告别手动挖洞:用Netsparker自动化扫描你的Web应用(附实战报告解读) 在快节奏的Web开发环境中,安全测试往往成为项目后期被压缩的环节。传统手动渗透测试需要安全专家投入数十小时,而中小团队常面临资源不足的困境。Net…...