【YOLOv8改进[Backbone]】使用SCINet改进YOLOv8在黑暗环境的目标检测效果
目录
一 SCINet
1 本文方法
① 权重共享的照明学习
② 自校准模块
③ 无监督训练损失
二 使用SCINet助力YOLOv8在黑暗环境的目标检测效果
1 整体修改
2 配置文件
3 训练
其他
一 SCINet
官方论文地址:https://arxiv.org/pdf/2204.10137
官方代码地址:GitCode - 开发者的代码家园
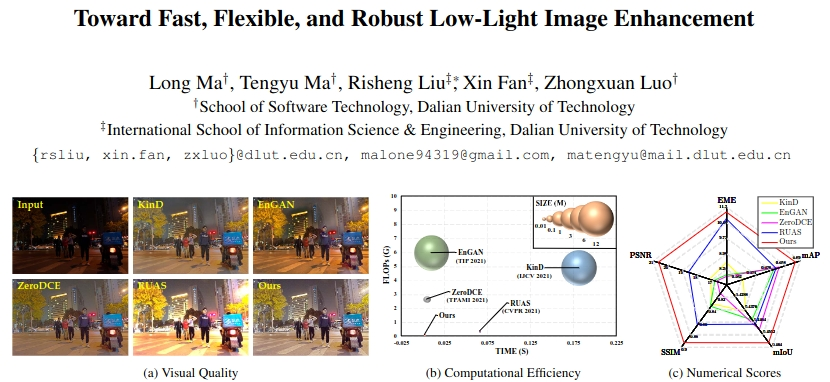
现有的弱光图像增强技术不仅难以处理视觉质量和计算效率问题,而且在未知的复杂场景下通常无效。在本文中,提出了一种新的自校准照明(SCI)学习框架,用于在现实世界低光场景下快速,灵活和鲁棒的增亮图像。具体来说,建立了一个具有权重共享的级联照明学习过程来处理这个任务。作者考虑到级联模式的计算负担,构建了自校准模块,实现了各阶段结果之间的收敛,产生了仅使用单个基本块进行推理的增益(但在以往的工作中尚未被利用),大大降低了计算成本。然后,定义了无监督训练损失,以提高模型适应一般场景的能力。进一步,进行了全面的探索,挖掘SCI的固有属性(现有作品所缺乏的),包括操作不敏感的适应性。最后,大量的实验和消融研究充分表明了这一方法在质量和效率上的优势。在微光人脸检测和夜间语义分割等方面的应用充分显示了该方法潜在的实用价值。
在本文中,成功地建立了一个轻量级而有效的框架,即自校准照明(SCI),用于针对不同现实场景的低光图像增强。不仅对SCI的优良特性进行了深入的探索,还进行了大量的实验,证明了在弱光图像增强、暗人脸检测、夜间语义分割等方面的有效性和优越性。
1 本文方法
① 权重共享的照明学习
建立了一个具有权重共享的级联照明学习过程来处理低照度图像增强的任务。各个阶段共享权重。
② 自校准模块
构建了自校准模块,减少计算负担,实现了各阶段结果之间的收敛,产生了仅使用单个基本块进行推理的增益。
③ 无监督训练损失
定义了无监督训练损失,以提高模型适应一般场景的能力。
下图为SCI的整个框架。在训练阶段,SCI由照度估计和自校准模块组成。将自校准的模块映射添加到原始低照度输入中,作为下一阶段照度估计的输入。注意,这两个模块在整个训练过程中分别是共享参数。在测试阶段,只使用单个照明估计模块。权重共享的照明学习和自校准模块的设计为减少计算量并且提升结果的稳定性。

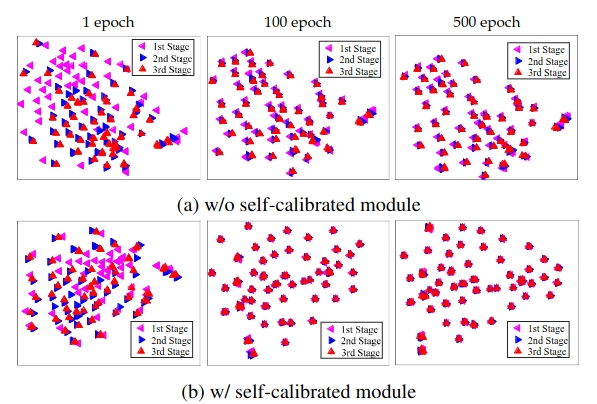
下图为比较是否使用自校准模块时各阶段结果的t-SNE[21]分布。这说明了为什么可以使用单级进行测试,即SCI中每级的结果都可以快速收敛到相同的值,而w/o自校准模块却无法始终实现这一点。
以下为各方法对比结果:


二 使用SCINet助力YOLOv8在黑暗环境的目标检测效果
整个结构的示意图如下所示:

1 整体修改
① 添加SCINet.py文件
在ultralytics/nn/modules目录下新建SCINet.py文件,文件的内容如下:
import torch
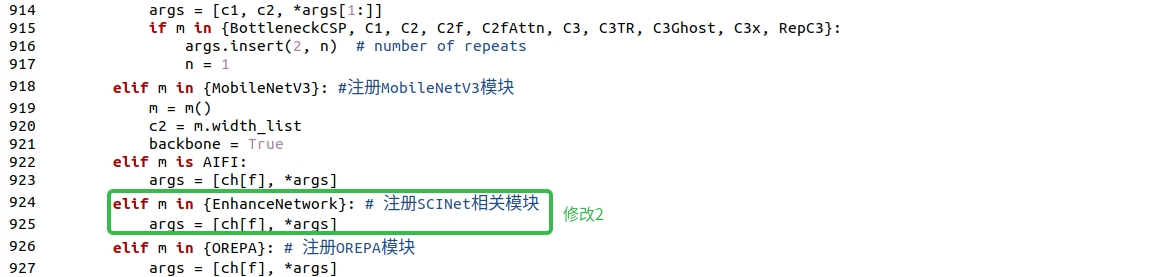
import torch.nn as nn__all__ = ['EnhanceNetwork']class EnhanceNetwork(nn.Module):def __init__(self, layers, channels):super(EnhanceNetwork, self).__init__()kernel_size = 3dilation = 1padding = int((kernel_size - 1) / 2) * dilationself.in_conv = nn.Sequential(nn.Conv2d(in_channels=3, out_channels=channels, kernel_size=kernel_size, stride=1, padding=padding),nn.ReLU())self.conv = nn.Sequential(nn.Conv2d(in_channels=channels, out_channels=channels, kernel_size=kernel_size, stride=1, padding=padding),nn.BatchNorm2d(channels),nn.ReLU())self.blocks = nn.ModuleList()for i in range(layers):self.blocks.append(self.conv)self.out_conv = nn.Sequential(nn.Conv2d(in_channels=channels, out_channels=3, kernel_size=3, stride=1, padding=1),nn.Sigmoid())def forward(self, input):fea = self.in_conv(input)for conv in self.blocks:fea = fea + conv(fea)fea = self.out_conv(fea)illu = fea + inputillu = torch.clamp(illu, 0.0001, 1)return illuclass CalibrateNetwork(nn.Module):def __init__(self, layers, channels):super(CalibrateNetwork, self).__init__()kernel_size = 3dilation = 1padding = int((kernel_size - 1) / 2) * dilationself.layers = layersself.in_conv = nn.Sequential(nn.Conv2d(in_channels=3, out_channels=channels, kernel_size=kernel_size, stride=1, padding=padding),nn.BatchNorm2d(channels),nn.ReLU())self.convs = nn.Sequential(nn.Conv2d(in_channels=channels, out_channels=channels, kernel_size=kernel_size, stride=1, padding=padding),nn.BatchNorm2d(channels),nn.ReLU(),nn.Conv2d(in_channels=channels, out_channels=channels, kernel_size=kernel_size, stride=1, padding=padding),nn.BatchNorm2d(channels),nn.ReLU())self.blocks = nn.ModuleList()for i in range(layers):self.blocks.append(self.convs)self.out_conv = nn.Sequential(nn.Conv2d(in_channels=channels, out_channels=3, kernel_size=3, stride=1, padding=1),nn.Sigmoid())def forward(self, input):fea = self.in_conv(input)for conv in self.blocks:fea = fea + conv(fea)fea = self.out_conv(fea)delta = input - feareturn deltaclass Network(nn.Module):def __init__(self, stage=3):super(Network, self).__init__()self.stage = stageself.enhance = EnhanceNetwork(layers=1, channels=3)self.calibrate = CalibrateNetwork(layers=3, channels=16)self._criterion = LossFunction()def weights_init(self, m):if isinstance(m, nn.Conv2d):m.weight.data.normal_(0, 0.02)m.bias.data.zero_()if isinstance(m, nn.BatchNorm2d):m.weight.data.normal_(1., 0.02)def forward(self, input):ilist, rlist, inlist, attlist = [], [], [], []input_op = inputfor i in range(self.stage):inlist.append(input_op)i = self.enhance(input_op)r = input / ir = torch.clamp(r, 0, 1)att = self.calibrate(r)input_op = input + attilist.append(i)rlist.append(r)attlist.append(torch.abs(att))return ilist, rlist, inlist, attlistdef _loss(self, input):i_list, en_list, in_list, _ = self(input)loss = 0for i in range(self.stage):loss += self._criterion(in_list[i], i_list[i])return lossclass Finetunemodel(nn.Module):def __init__(self, weights):super(Finetunemodel, self).__init__()self.enhance = EnhanceNetwork(layers=1, channels=3)self._criterion = LossFunction()base_weights = torch.load(weights)pretrained_dict = base_weightsmodel_dict = self.state_dict()pretrained_dict = {k: v for k, v in pretrained_dict.items() if k in model_dict}model_dict.update(pretrained_dict)self.load_state_dict(model_dict)def weights_init(self, m):if isinstance(m, nn.Conv2d):m.weight.data.normal_(0, 0.02)m.bias.data.zero_()if isinstance(m, nn.BatchNorm2d):m.weight.data.normal_(1., 0.02)def forward(self, input):i = self.enhance(input)r = input / ir = torch.clamp(r, 0, 1)return i, rdef _loss(self, input):i, r = self(input)loss = self._criterion(input, i)return loss② 修改ultralytics/nn/tasks.py文件
具体的修改内容如下图所示:

修改parse_model函数的内容如下所示:
2 配置文件
yolov8_SCINet.yaml 的内容与原版对比:

3 训练
上述修改完毕后,开始训练吧!🌺🌺🌺🌺🌺🌺
训练示例:
yolo task=detect mode=train model=cfg/models/v8/yolov8_SCINet.yaml data=cfg/datasets/coco128.yaml epochs=200 batch=16 device=cpu project=yolov8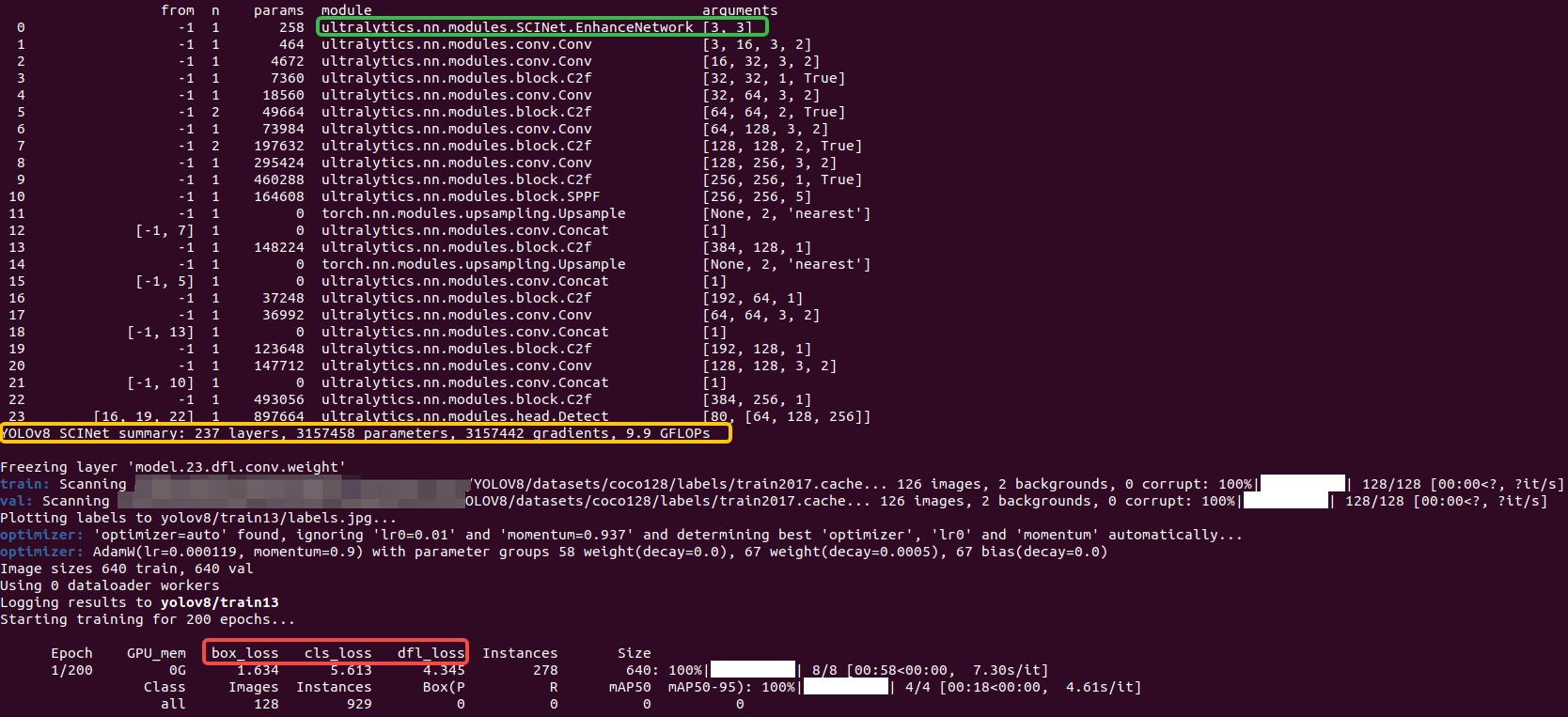
其他
说明:私信问题,不回答了哈,有问题可以评论,会随缘回答哈。希望理解哈!💛 💙 💜 ❤️ 💚 💛 💙 💜 ❤️ 💚
到此,本文分享的内容就结束啦!遇见便是缘,感恩遇见!!!💛 💙 💜 ❤️ 💚
相关文章:
【YOLOv8改进[Backbone]】使用SCINet改进YOLOv8在黑暗环境的目标检测效果
目录 一 SCINet 1 本文方法 ① 权重共享的照明学习 ② 自校准模块 ③ 无监督训练损失 二 使用SCINet助力YOLOv8在黑暗环境的目标检测效果 1 整体修改 2 配置文件 3 训练 其他 一 SCINet 官方论文地址:https://arxiv.org/pdf/2204.10137 官方代码地址&…...

ASE docker related research
ASE 2022 Understanding and Predicting Docker Build Duration: An Empirical Study of Containerized Workflow of OSS Projects 理解和预测 Docker 构建持续时间:OSS 项目容器化工作流程的实证研究 Docker 构建是容器化工作流程的关键组成部分,它…...
maven .lastUpdated文件作用
现象 有时候我在用maven管理项目时会发现有些依赖报错,这时你可以看一下本地仓库中是否有.lastUpdated文件,也许与它有关。 原因 有这个文件就表示依赖下载过程中发生了错误导致依赖没成功下载,可能是网络原因,也有可能是远程…...
gtest的编译与使用
文章目录 gtest的编译与使用概述笔记CMake参数官方文档测试程序测试效果END gtest的编译与使用 概述 gTest是 googletest的缩写,如果直接找gTest项目,是找不到的。 库地址 https://github.com/google/googletest.git 迁出到本地后,切到最新…...
【 npm详解:从入门到精通】
文章目录 npm详解:从入门到精通1. [npm](https://www.npmjs.com/)的安装2. npm的基础用法2.1 初始化项目2.2 安装依赖2.3 卸载依赖2.4 更新依赖 3. npm的高级用法3.1 运行脚本3.2 使用npm scope3.3 使用npm link 4. npm资源5. 使用npm进行依赖树分析和可视化6. npm进…...

【Web后端】实现文件上传
表单必须使用post提交 ,enctype 必须是multipart/form-data在Servlet上填加注解 MultipartConfiglocation :默认情况下将存储文件的目录,默认值为“”。maxFileSize :允许上传文件的最大大小,其值以字节为单位。 默认值为-1L表示无…...
)
react 逻辑 AND 运算符 ()
在 React 组件中,当你想在条件为 true 时渲染一些 JSX 时,它经常会出现,或者什么都不渲染。使用 ,只有在以下情况下才能有条件地呈现复选标记:&&isPackedtrue return (<li className"item">{…...
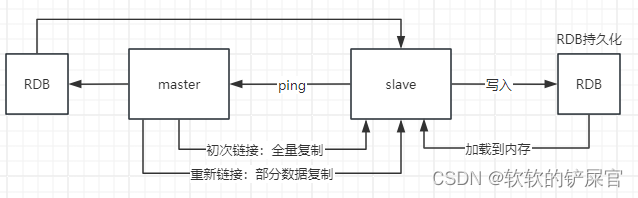
Redis详解(二)
事务 什么是事务? 事务是一个单独的隔离操作:事务中的所有命令都会序列化、按顺序地执行。事务在执行的过程中,不会被其他客户端发送来的命令请求所打断。 事务是一个原子操作:事务中的命令要么全部被执行,要么全部都…...

嵌入式:基于STM32的智能家居照明控制系统
在智能家居系统中,自动照明控制不仅提高了居住舒适度,还有助于节能减排。本教程旨在引导读者通过使用STM32微控制器来开发一个智能照明控制系统。该系统能够根据环境光线自动调整室内照明的亮度,并支持通过简单的用户界面手动控制光线。 一、…...

三种基本排序-冒泡,选择,二分
闲话不多说,直接上代码,简明易懂,条理清晰,交互性强,尽善尽美 码住,建议copy下来: 先上二分法吧,稍复杂点的,代码多一些,用了函数调用 二分排序࿱…...

windows查找重复的物理地址
单独查询所有物理(mac)地址(cmd执行):arp -a 查找同一局域网下重复的mac,打开power shell执行以下命令: Get-NetNeighbor | Where-Object { $_.State -eq "Reachable" } | Select-O…...
-shell脚本应用(三))
linux进阶高级配置,你需要知道的有哪些(8)-shell脚本应用(三)
1、for循环语句的结构: for 变量名 in 取值列表 do 命令序列 done 2、while循环语句结构: while 条件测试 do 命令序列 done 3、for和while的区别 for:控制循环来自于取值列表 while:控制循环来自于条件测试 4、case语句的…...

安全测试|常见SQL注入攻击方式、影响及预防
SQL注入 什么是SQL注入? SQL注入是比较常见的网络攻击方式之一,主要攻击对象是数据库,针对程序员编写时的疏忽,通过SQL语句,实现无账号登录,篡改数据库。 SQL注入简单来说就是通过在表单中填写包含SQL关键…...
【Git】Git在Gitee上的基本操作指南
文章目录 1. 查看 git 版本2. 从Gitee克隆仓库:3. 复制文件到工作目录:4. 将未跟踪的文件添加到暂存区:5. 在本地提交更改:6. 将更改推送到远程仓库(Gitee):7. Windows特定提示: 1. …...
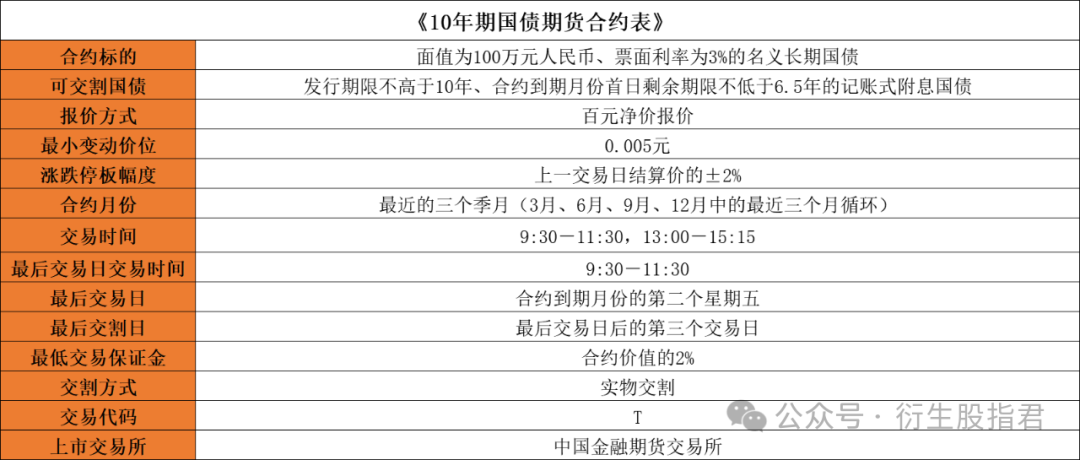
国债期货怎么买?十年国债交易手册
国债,简单来说,就是国家为了筹集资金而向大众借钱的一种方式。国家通过发行债券,向投资者承诺在约定的时间里支付利息,并在到期时归还本金。因为是国家发行的,所以国债的信用等级非常高,通常被认为是非常安…...

公司申请增加公众号数量
一般可以申请多少个公众号?众所周知,在2013年前后,公众号申请是不限制数量的,后来企业开始限制申请50个,直到2018年的11月tx又发布,其中个人主体可申请公众号由2个调整为1个,企业主体由50个调整…...
什么是.faust勒索病毒?应该如何防御?
faust勒索病毒详细介绍 faust勒索病毒是一种新型的勒索软件,最早出现在2018年。该病毒通过加密计算机系统中的文件并要求支付赎金来解锁文件,从而获取经济利益。与传统的勒索软件相比,faust勒索病毒采用了更加先进的加密算法和隐藏技术&#…...
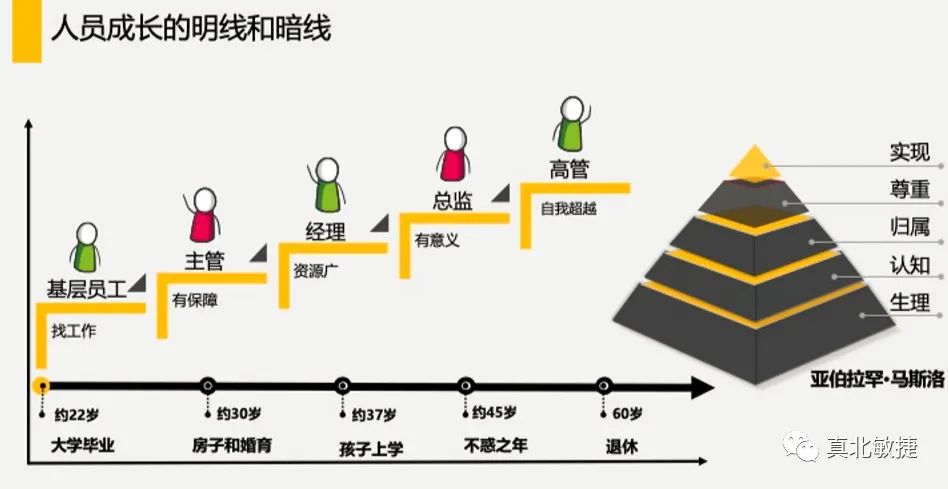
邓闲小——生存、生活、生命|真北写作
人生有三个层次∶生存、生活、生命。 生存就是做必须做的事。生存的模式是邓,是交易,是买卖。别人需要的东西,你生产出来,卖给他。哪怕这个东西没啥用,也可以卖,情绪也可以卖。你需要的东西,你花…...
品牌舆情都包含什么内容?建议收藏
一个品牌的声誉、形象、产品质量、服务质量等,无时无刻不在接受着大众的检验。互联网传播迅速,一个不好的舆论直接导致整个品牌的声誉受到严重影响。品牌舆情都包含什么内容?接下来伯乐网络传媒就来给大家讲一讲。 一、品牌舆情的基本构成 1…...
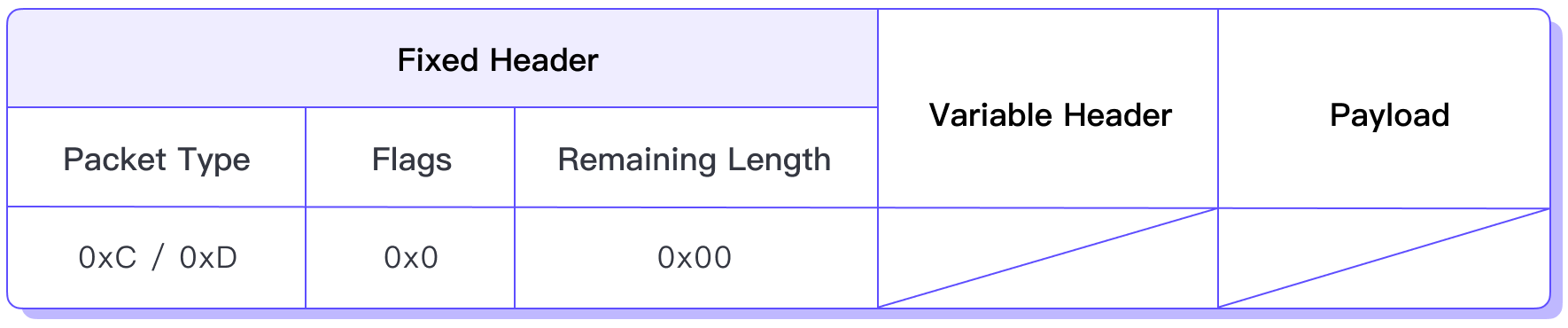
MQTT 5.0 报文解析 04:PINGREQ 与 PINGRESP
欢迎阅读 MQTT 5.0 报文系列 的第四篇文章。在上一篇中,我们已经介绍了 MQTT 5.0 中的 SUBSCRIBE 报文和 UNSUBSCRIBE 报文。现在,我们将介绍用于维持连接的控制报文:PINGREQ 和 PINGRESP。 除了用于连接、发布和订阅的控制报文,…...

Warcraft Helper完整指南:3步解决魔兽争霸3在Win10/Win11的兼容性问题
Warcraft Helper完整指南:3步解决魔兽争霸3在Win10/Win11的兼容性问题 【免费下载链接】WarcraftHelper Warcraft III Helper , support 1.20e, 1.24e, 1.26a, 1.27a, 1.27b 项目地址: https://gitcode.com/gh_mirrors/wa/WarcraftHelper 还在为魔兽争霸3在W…...

SillyTavern角色卡片系统:打造属于你的AI灵魂伴侣
SillyTavern角色卡片系统:打造属于你的AI灵魂伴侣 【免费下载链接】SillyTavern LLM Frontend for Power Users. 项目地址: https://gitcode.com/GitHub_Trending/si/SillyTavern 你是否曾经幻想过,能有一个真正理解你、陪伴你的AI伙伴࿱…...

图像边缘检测算法全解析:从Sobel到Canny的实战指南
1. 项目概述:从“看见”到“看懂”的第一步在机器视觉的世界里,让计算机“看见”只是第一步,真正的挑战在于让它“看懂”。而“看懂”一幅图像,往往始于识别其轮廓与边界。这就是“边缘检测”的核心价值所在——它如同视觉系统的“…...

AI智能体评估框架AgentEval:模块化设计与自动化评测实践
1. 项目概述:AgentEval,一个为AI智能体“打分”的裁判最近在折腾AI智能体(Agent)的开发,从简单的自动化脚本到复杂的多步推理系统,我前前后后也做了不少。但每次做完一个Agent,最头疼的问题就来…...

使用 TaoToken CLI 工具为团队统一配置开发环境中的模型端点
🚀 告别海外账号与网络限制!稳定直连全球优质大模型,限时半价接入中。 👉 点击领取海量免费额度 使用 TaoToken CLI 工具为团队统一配置开发环境中的模型端点 基础教程类,面向团队技术负责人,介绍如何通过…...

ARM RealView开发套件实战指南与优化技巧
1. ARM RealView开发套件概述作为一名从事嵌入式开发多年的工程师,我深知一套优秀的开发工具对项目效率的影响。ARM RealView开发套件(RVDK)是ARM公司推出的专业级嵌入式开发解决方案,专为基于ARM架构的处理器设计。这套工具链在我…...

智慧能耗管理系统:嵌入式工控机在工业节能中的核心应用
1. 工厂能耗管理的痛点与智能化转型契机 在制造业摸爬滚打十几年,我见过太多工厂在能耗管理上的“粗放式”经营。电费单是每个月固定的大额支出,但具体电用在了哪里,哪个车间、哪条产线、甚至哪台设备是“电老虎”,很多时候都是一…...

Unity问题记录
一个物体在Scene窗口看不见,Game窗口能看见。选中它时,打开Gizmos也看不见身上碰撞体的线框。也无法被射线检测到。换成其他Mesh:Open Asset In Context正常显示:把它Revert回预制体,还是不显示。Ctrl D复制一个&#…...

蓝桥杯单片机备赛:AT24C02 EEPROM存储整型数据的完整流程与常见错误分析
蓝桥杯单片机备赛:AT24C02 EEPROM存储整型数据的完整流程与常见错误分析 在蓝桥杯单片机竞赛中,AT24C02 EEPROM模块是必考内容之一。许多选手已经掌握了基本字符型数据的读写操作,但当面对整型数据时,往往会遇到各种问题。本文将深…...
)
别再为‘No module named matlab.engine’抓狂了!手把手教你MATLAB与Python版本匹配与绑定(附Anaconda虚拟环境指南)
彻底解决MATLAB与Python版本冲突:从原理到实战的完整指南 当你兴奋地想在Python中调用MATLAB强大的信号处理功能时,突然跳出的"No module named matlab.engine"错误提示就像一盆冷水浇下来。这不是简单的安装问题,而是两个生态系统…...