robosuite导入自定义机器人
目录
- 目的:
- 案例一:
- 成果展示
- 具体步骤:
- URDF文件准备
- xml文件生成
- xml修改
- 机器人构建
目的:
实现其他标准/非标准机器人的构建
案例一:
成果展示
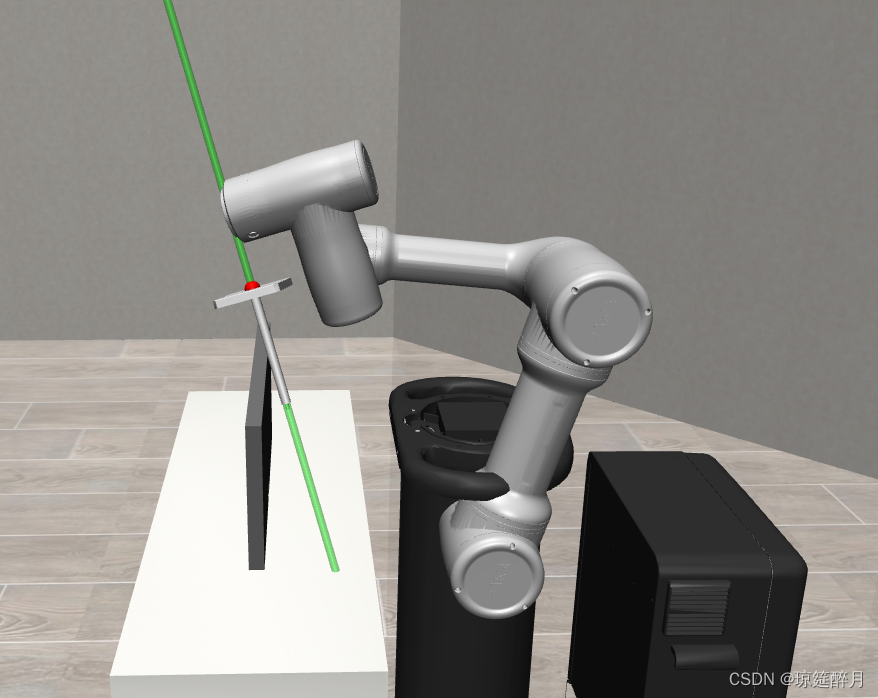
添加机器人JAKA ZU 7 这个模型
具体步骤:
URDF文件准备
从 github 或机器人官网,下载 urdf 模型以及对应的 mesh
xml文件生成
官方提供的 urdf 模型如下:
<?xml version="1.0" encoding="utf-8" ?>
<!-- This URDF was automatically created by SolidWorks to URDF Exporter! Originally created by Stephen Brawner (brawner@gmail.com) Commit Version: 1.5.1-0-g916b5db Build Version: 1.5.7152.31018For more information, please see http://wiki.ros.org/sw_urdf_exporter -->
<robot name="jaka_zu7"><!-- LINK --><link name="world" /><link name="Link_0"> <inertial><origin xyz="0.00096371 8.8222E-08 0.019555" rpy="0 0 0" /><mass value="4.0392" /><inertia ixx="0.0048763" ixy="-1.8056E-07" ixz="2.5196E-05" iyy="0.0068003" iyz="-1.7678E-09" izz="0.010618" /></inertial><visual><origin xyz="0 0 0" rpy="0 0 0" /><geometry><mesh filename="/home/idm/Downloads/jaka_robot_v2.2/src/jaka_description/meshes/jaka_zu7_meshes/Link_0.STL" /></geometry><material name=""><color rgba="0.84706 0.84706 0.84706 1" /></material></visual><collision><origin xyz="0 0 0" rpy="0 0 0" /><geometry><mesh filename="/home/idm/Downloads/jaka_robot_v2.2/src/jaka_description/meshes/jaka_zu7_meshes/Link_0.STL" /></geometry></collision></link><gazebo><plugin name="gazebo_ros_control" filename="libgazebo_ros_control.so"><robotNamespace>/</robotNamespace><!-- <robotSimType>gazebo_ros_control/DefaultRobotHWSim</robotSimType><legacyModeNS>true</legacyModeNS> --></plugin></gazebo>
</robot>
修改最下面,将 gazebo 改成:
<mujoco><compiler meshdir="/home/idm/Downloads/jaka_robot_v2.2/src/jaka_description/meshes/jaka_zu7_meshes/" balanceinertia="true" discardvisual="false" /></mujoco>
注意修改下 meshdir 的路径。
然后执行 ./compile urdf robot.xml,实现 urdf 到 xml 的转变,后续操作之需要在 xml 的基础上修改即可;
xml修改
原始生成的文件如下:
<mujoco model="jaka_zu7"><compiler angle="radian" meshdir="/home/idm/Downloads/jaka_robot_v2.2/src/jaka_description/meshes/jaka_zu7_meshes/" /><size njmax="500" nconmax="100" /><asset><mesh name="Link_0" file="Link_0.STL" /><mesh name="Link_1" file="Link_1.STL" /><mesh name="Link_2" file="Link_2.STL" /><mesh name="Link_3" file="Link_3.STL" /><mesh name="Link_4" file="Link_4.STL" /><mesh name="Link_5" file="Link_5.STL" /><mesh name="Link_6" file="Link_6.STL" /></asset><worldbody><geom type="mesh" contype="0" conaffinity="0" group="1" rgba="0.84706 0.84706 0.84706 1" mesh="Link_0" /><geom type="mesh" rgba="0.84706 0.84706 0.84706 1" mesh="Link_0" /><body name="Link_1" pos="0 0 0.12015"><inertial pos="-2.5186e-07 0.0033226 -0.001509" quat="1 0.00056994 2.2456e-05 6.30952e-05" mass="15.135" diaginertia="0.044302 0.043091 0.030523" /><joint name="joint_1" pos="0 0 0" axis="0 0 1" limited="true" range="-6.28 6.28" /><geom type="mesh" contype="0" conaffinity="0" group="1" rgba="0.84706 0.84706 0.84706 1" mesh="Link_1" /><geom type="mesh" rgba="0.84706 0.84706 0.84706 1" mesh="Link_1" /><body name="Link_2" pos="0 0 0" quat="0.707105 0.707108 0 0"><inertial pos="0.18 8.8001e-09 -0.14308" quat="0.5 0.5 0.5 0.5" mass="42.872" diaginertia="1.1119 1.0844 0.1014" /><joint name="joint_2" pos="0 0 0" axis="0 0 1" limited="true" range="-1.48 4.62" /><geom type="mesh" contype="0" conaffinity="0" group="1" rgba="0.84706 0.84706 0.84706 1" mesh="Link_2" /><geom type="mesh" rgba="0.84706 0.84706 0.84706 1" mesh="Link_2" /><body name="Link_3" pos="0.36 0 0"><inertial pos="0.15515 5.4643e-08 -0.012576" quat="0.517406 0.481957 0.481946 0.517433" mass="16.562" diaginertia="0.28365 0.279787 0.0196608" /><joint name="joint_3" pos="0 0 0" axis="0 0 1" limited="true" range="-3.05 3.05" /><geom type="mesh" contype="0" conaffinity="0" group="1" rgba="0.84706 0.84706 0.84706 1" mesh="Link_3" /><geom type="mesh" rgba="0.84706 0.84706 0.84706 1" mesh="Link_3" /><body name="Link_4" pos="0.30353 0 -0.11501"><inertial pos="-2.1345e-06 -0.0058004 0.0026717" quat="0.699182 0.714944 2.86648e-05 -8.42093e-06" mass="5.5525" diaginertia="0.0092564 0.00897016 0.00522324" /><joint name="joint_4" pos="0 0 0" axis="0 0 1" limited="true" range="-1.48 4.62" /><geom type="mesh" contype="0" conaffinity="0" group="1" rgba="0.84706 0.84706 0.84706 1" mesh="Link_4" /><geom type="mesh" rgba="0.84706 0.84706 0.84706 1" mesh="Link_4" /><body name="Link_5" pos="0 -0.1135 0" quat="0.707105 0.707108 0 0"><inertial pos="-2.0304e-06 -0.0028889 -0.0023424" quat="0.709446 0.70476 -1.15346e-05 9.23912e-07" mass="6.3339" diaginertia="0.012993 0.0127003 0.0058451" /><joint name="joint_5" pos="0 0 0" axis="0 0 1" limited="true" range="-6.28 6.28" /><geom type="mesh" contype="0" conaffinity="0" group="1" rgba="0.84706 0.84706 0.84706 1" mesh="Link_5" /><geom type="mesh" rgba="0.84706 0.84706 0.84706 1" mesh="Link_5" /><body name="Link_6" pos="0 0.107 0" quat="0.707105 -0.707108 0 0"><inertial pos="2.7652e-05 -1.3485e-05 -0.021245" quat="-0.0453216 0.705107 0.0468242 0.7061" mass="1.4169" diaginertia="0.0011337 0.00072384 0.000718438" /><joint name="joint_6" pos="0 0 0" axis="0 0 1" limited="true" range="-6.28 6.28" /><geom type="mesh" contype="0" conaffinity="0" group="1" rgba="0.84706 0.84706 0.84706 1" mesh="Link_6" /><geom type="mesh" rgba="0.84706 0.84706 0.84706 1" mesh="Link_6" /></body></body></body></body></body></body></worldbody>
</mujoco>
- 首先把
compiler,size这两行去掉,没用了,然后把asset中的file修改下路径即可; - 增加代码
<actuator><motor ctrllimited="true" ctrlrange="-150.0 150.0" joint="joint_1" name="torq_j1"/><motor ctrllimited="true" ctrlrange="-150.0 150.0" joint="joint_2" name="torq_j2"/><motor ctrllimited="true" ctrlrange="-150.0 150.0" joint="joint_3" name="torq_j3"/><motor ctrllimited="true" ctrlrange="-28.0 28.0" joint="joint_4" name="torq_j4"/><motor ctrllimited="true" ctrlrange="-28.0 28.0" joint="joint_5" name="torq_j5"/><motor ctrllimited="true" ctrlrange="-28.0 28.0" joint="joint_6" name="torq_j6"/>
</actuator>
- 在
link_6后面加上right_hand
<body name="Link_6" pos="0 0.107 0" quat="0.707105 -0.707108 0 0"><inertial pos="2.7652e-05 -1.3485e-05 -0.021245" quat="-0.0453216 0.705107 0.0468242 0.7061" mass="1.4169" diaginertia="0.0011337 0.00072384 0.000718438" /><joint name="joint_6" pos="0 0 0" axis="0 0 1" limited="true" range="-6.28 6.28" /><geom type="mesh" contype="0" conaffinity="0" group="1" rgba="0.84706 0.84706 0.84706 1" mesh="Link_6" /><geom type="mesh" rgba="0.84706 0.84706 0.84706 1" mesh="Link_6" /><body name="right_hand" pos="0 0.098 0" quat="0.707 -0.707 0 0" ><!-- This camera points out from the eef. --><camera mode="fixed" name="eye_in_hand" pos="0.05 0 0" quat="0 0.707108 0.707108 0" fovy="75"/></body>
</body>
截止到此,该机器人配置文件可用了。
机器人构建
从原有机器人中,随便找个机器人的 py 文件,复制一份,然后该个名字,并在 init 中注册以下就可以了
相关文章:
robosuite导入自定义机器人
目录 目的:案例一:成果展示具体步骤:URDF文件准备xml文件生成xml修改机器人构建 目的: 实现其他标准/非标准机器人的构建 案例一: 成果展示 添加机器人JAKA ZU 7 这个模型 具体步骤: URDF文件准备 从…...

四天学会JS高阶(学好vue的关键)——构造函数数据常用函数(理论+实战)(第二天)
一、对象创建引发构造函数产生 1.1 创建对象三种方式: 利用对象字面量创建对象 const obj {name: 佩奇}注:对象字面量的由来:即它是直接由字面形式(由源代码直接)创建出来的对象,而不是通过构造函数或者…...
【Linux学习】进程地址空间与写时拷贝
文章目录 Linux进程内存布局图:内存布局的验证 进程地址空间写时拷贝 Linux进程内存布局图: 地址空间的范围,在32位机器上是2^32比特位,也就是[0,4G]。 内存布局的验证 代码验证内存布局: 验证代码: #include<s…...

Git远程控制
文章目录 1. 创建仓库1.1 Readme1.2 Issue1.3 Pull request 2. 远程仓库克隆3. 推送远程仓库4. 拉取远程仓库5. 配置Git.gitignore配置别名 使用GitHub可以,采用Gitee也行 1. 创建仓库 1.1 Readme Readme文件相当于这个仓库的说明书,gitee会初始化2两份…...
怎样从SQL中分析和提取访问的字段信息?| OceanBase实践
当执行任意一条SELECT SQL语句时,我们如何能够分析出所访问的字段信息,并进一步判断结果集中的每一列数据具体来自于哪些数据库、表以及表中的哪些字段呢?本文将会详细阐述针对此问题的技术解决方案。 应用场景 从 SQL 中解析访问的原始字段…...
MySQL 服务无法启动
常见原因: 检查端口占用: 使用命令行工具(如netstat)来检查3306端口是否已被其他程序占用,输入netstat -ano(Windows)或netstat -tulnp | grep 3306(Linux/Mac)来查找3306端口的占用情况。如果…...

Python贪心算法
贪心算法(Greedy Algorithm)是一种常见的算法设计策略,它在每一步选择当前最优解,希望通过局部最优解最终得到全局最优解。贪心算法通常适用于满足一些特定条件的问题,例如货币找零、活动选择、任务调度等。贪心算法的…...
牛客网刷题 | BC85 牛牛学数列3
目前主要分为三个专栏,后续还会添加: 专栏如下: C语言刷题解析 C语言系列文章 我的成长经历 感谢阅读! 初来乍到,如有错误请指出,感谢! 描述 牛牛准备继续进阶&…...
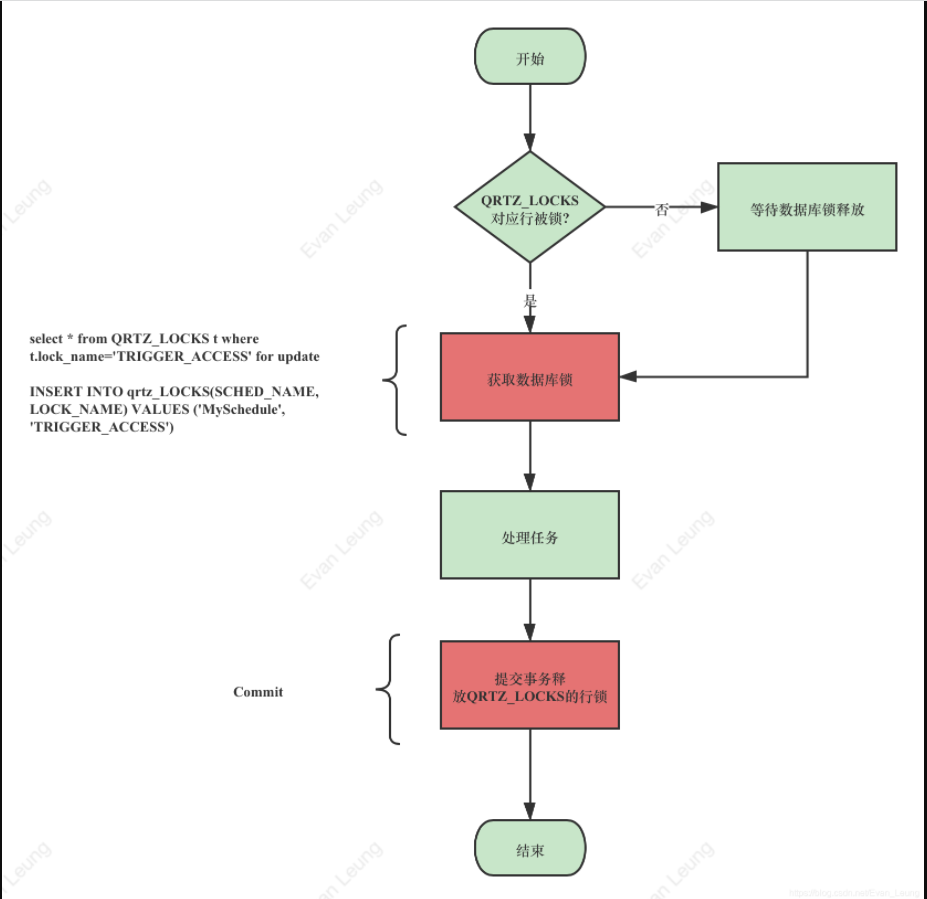
quartz定时任务
Quartz 数据结构 quartz采用完全二叉树:除了最后一层每一层节点都是满的,而且最后一层靠左排列。 二叉树节点个数规则:每层从左开始,第一层只有一个,就是2的0次幂,第二层两个就是2的1次幂,第三…...
——选择结构与循环结构)
Python基础学习笔记(五)——选择结构与循环结构
目录 程序的组织结构条件选择结构1. 单分支结构2. 双分支结构3. 多分支结构4. 嵌套(分支)结构5. 无内容执行6. 条件表达式 循环结构1. 可迭代对象2. range()函数3. for循环语句4. while循环语句5. 结束语句 程序的组织结构 程序的组织结构主要有以下三种…...

Vue插槽solt如何传递具名插槽的数据给子组件?
在Vue中,你可以通过作用域插槽(scoped slots)来传递数据给子组件。这同样适用于具名插槽。首先,你需要在子组件中定义一个具名插槽,并通过v-slot指令传递数据。例如: 子组件(ChildComponent.vu…...
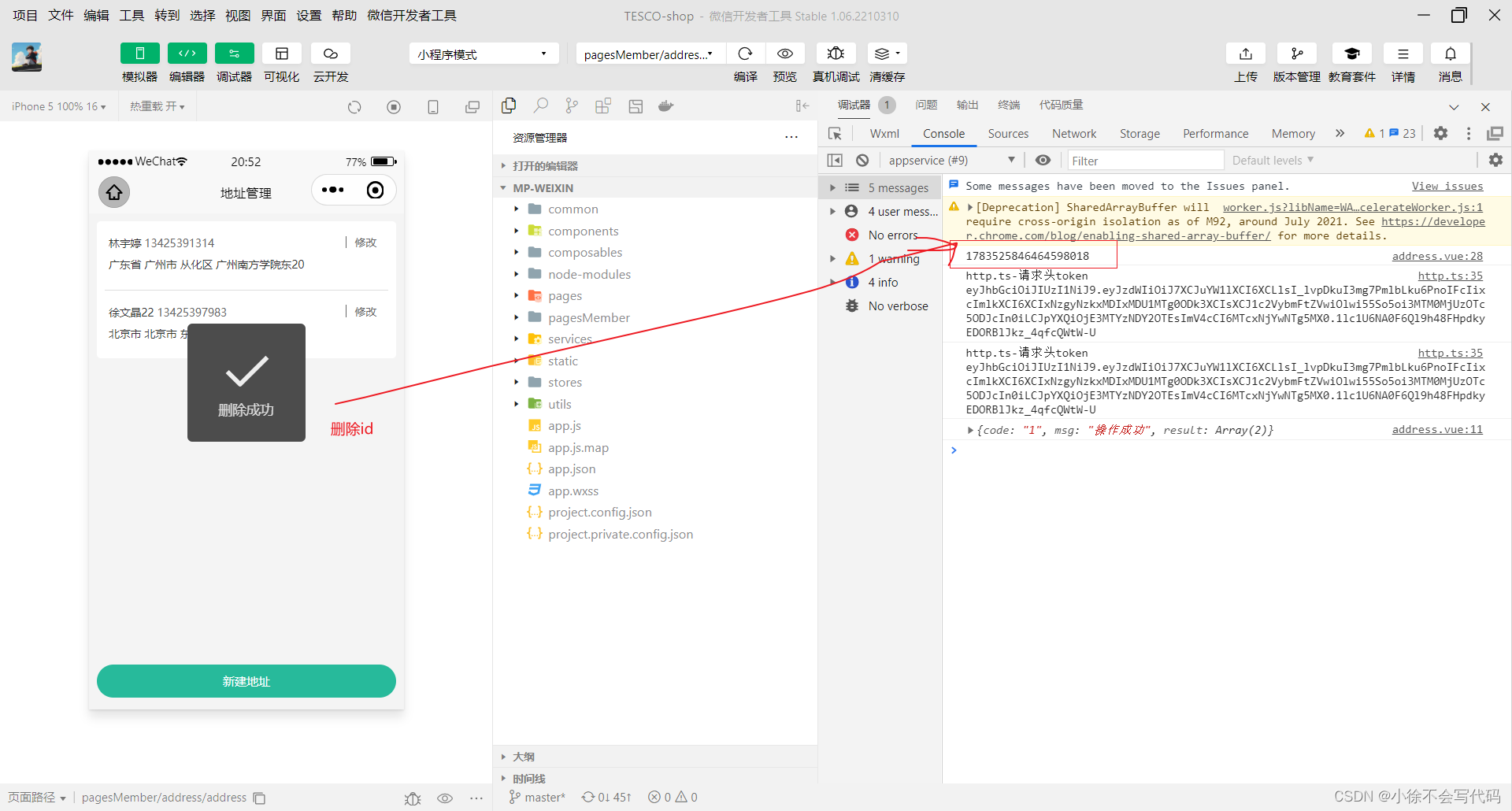
小程序-收货地址管理模块实现
页面结构代码: address-form.vue --->新建地址和修改地址页面 <template><view class"content"><form><!-- 表单内容 --><view class"form-item"><text class"label">收货人</text>…...
)
【星海随笔】微信小程序(三)
网络数据请求 1.小程序中网络数据请求的限制 出于安全性方面的考虑,小程序官方对 数据接口的请求 做出了如下 两个限制: ① 只能请求 HTTPS 类型的接口 ② 必须将 接口的域名 添加到 信任列表 中 微信小程序只能请求 https 类型的接口 且需要请求的域名必须提前进行设置后,才可…...
pip(包管理器) for Python
pip是什么 pip是Python的包安装程序,即python包管理器。您可以使用 pip 从Python包索引和其他索引安装包。 1. pip 安装 python 包 pip install 包名 例如:pip install pymssql : 使用pip安装数据库驱动包 pymssql 2.pip 卸载 python 包 pi…...

Ubuntu上安装Maven
在Ubuntu上安装Maven的步骤如下: 更新包索引: sudo apt update 安装Maven: sudo apt install maven 验证安装是否成功: mvn -version 以上步骤将会安装Maven并添加到系统路径中,你可以通过运行mvn -version来验…...

java中使用svnkit实现文件的版本管理
java中使用svnkit实现文件的版本管理 一、引入svnKit依赖二、初始化仓库工厂类二、使用svnkit创建本地存储仓库三、svn基本原子操作四、通过原子方法实现简单svn相应操作 一、引入svnKit依赖 <dependency><groupId>org.tmatesoft.svnkit</groupId><artifa…...
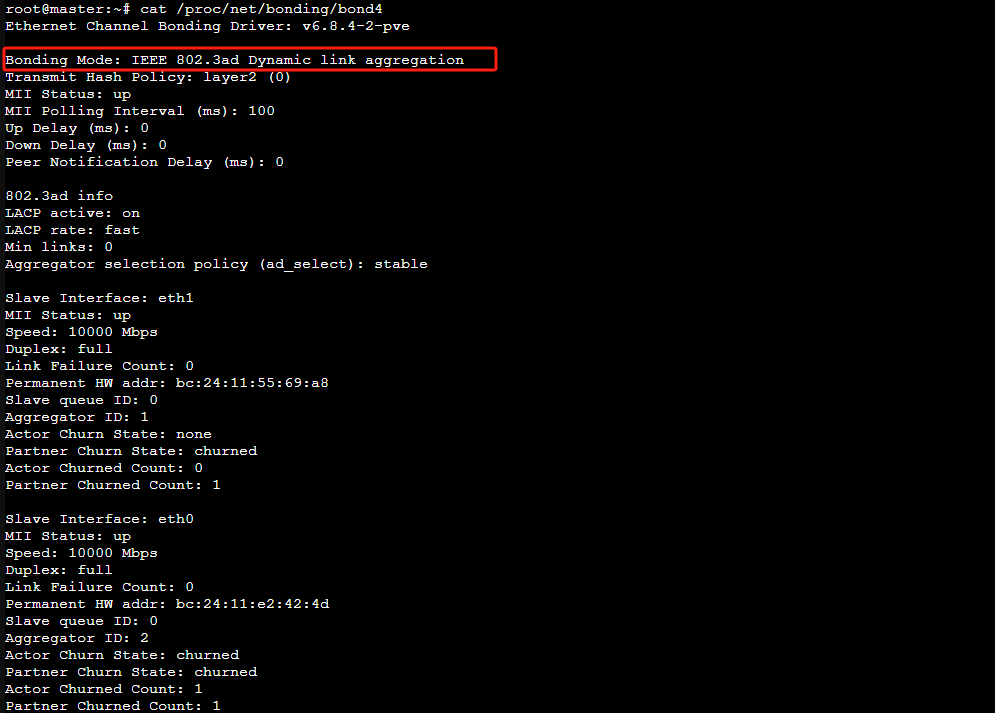
了解 Linux 网络卡绑定:提高网络性能与冗余性
在现代 IT 基础设施中,网络性能和可靠性至关重要。对于许多企业和个人用户来说,确保网络的高可用性和冗余性是首要任务之一。Linux 提供了一个强大的解决方案——网络卡绑定(Network Interface Card Bonding,简称 NIC Bonding&…...

2024年618购物狂欢节即将来袭!精选五款超值入手数码好物!
618购物狂欢盛宴即将落幕,是时候展现我们的购物智慧了!在追求价格优惠的同时,我们更应看重商品的品质与实用性。面对琳琅满目的选择,如何筛选出真正值得拥有的好物呢?为了让大家的购物之旅更加轻松愉快,以下…...

中国AI独角兽资本大冒险
成立不过一年多时间,月之暗面已然成为中国大模型赛道上,最炙手可热的明星公司。 5月21日,华尔街见闻获悉,月之暗面将按照投前估值30亿美元(合217.3亿人民币)进行融资,完成后依然会是当前中国估…...
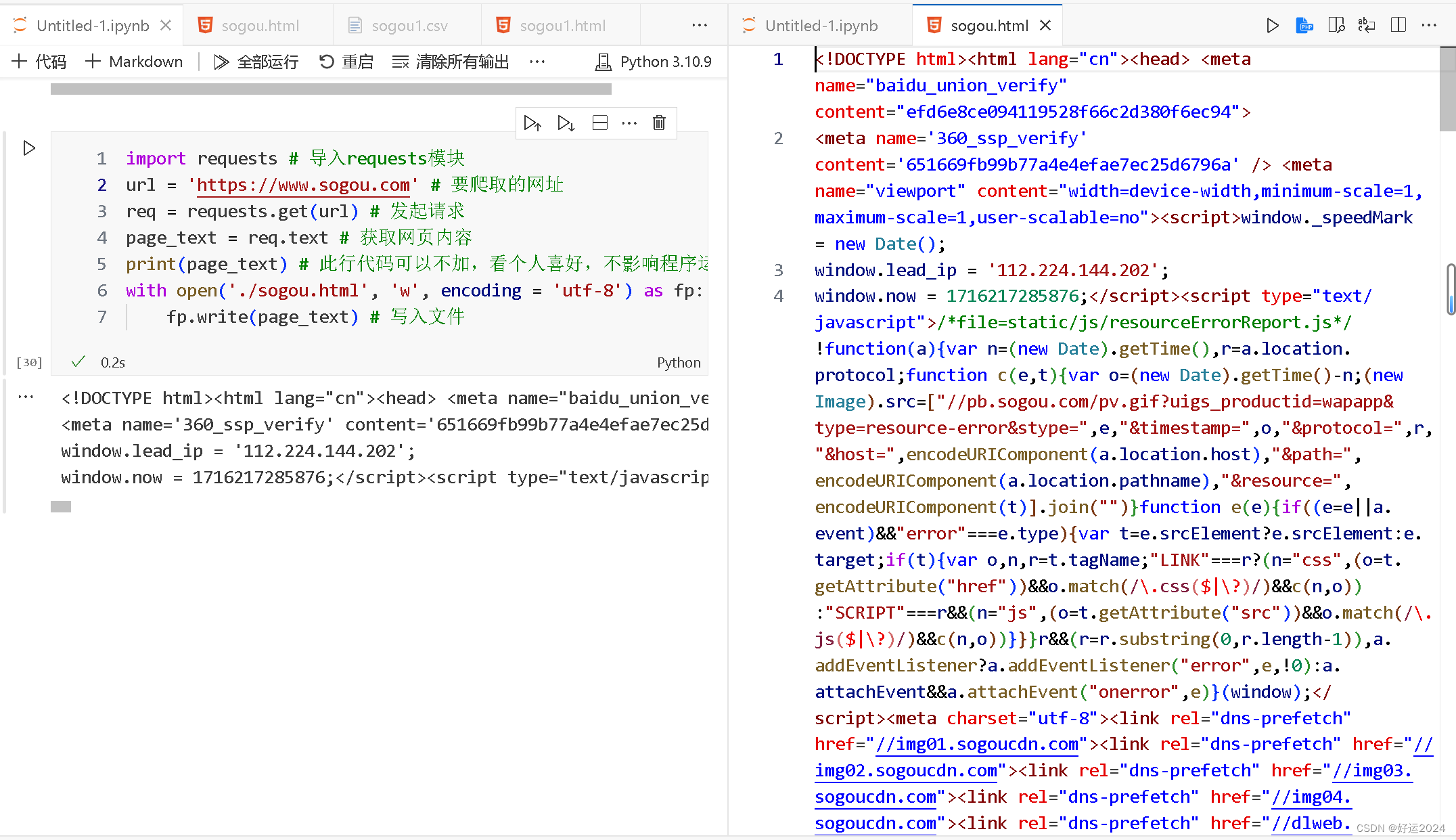
项目十二:简单的python基础爬虫训练
许久未见,甚是想念,今日好运,为你带好运。ok,废话不多说,希望这门案例能带你直接快速了解并运用。🎁💖 基础流程 第一步:安装需要用到的requests库,命令如下 pip inst…...
的标准化生成与检验计划集成)
[实战] 制造业质量控制中气泡图(Balloon Drawing)的标准化生成与检验计划集成
前言:2026 年质量管理的数字化底座在 2026 年的数字化工厂环境环境下,质量管理已从被动拦截转向主动预防。作为 FAI(首件检验)和 PPAP(生产件批准程序)流程中的核心环节,气泡图(Ball…...

OneMore:如何通过160+个功能命令彻底改变你的OneNote使用体验
OneMore:如何通过160个功能命令彻底改变你的OneNote使用体验 【免费下载链接】OneMore A OneNote add-in with simple, yet powerful and useful features 项目地址: https://gitcode.com/gh_mirrors/on/OneMore OneMore是一款专为OneNote设计的强大插件&…...

从QPLL与CPLL选型到线速计算:一份给Xilinx GTY新手的时钟配置速查手册
从QPLL与CPLL选型到线速计算:一份给Xilinx GTY新手的时钟配置速查手册 第一次接触Xilinx UltraScale系列FPGA的GTY收发器时,最让人头疼的莫过于时钟配置。面对QPLL0、QPLL1和CPLL三种时钟源,以及N1、N2、M、D等分频参数,新手工程师…...

AR/VR智能眼镜主板设计:从高通平台选型到量产调试全解析
1. 项目概述:从芯片到眼镜,一次完整的AR/VR智能眼镜主板设计之旅 最近几年,智能眼镜的浪潮又回来了,但这次不再是简单的信息提示器,而是真正能承载复杂应用、具备独立计算能力的VR/AR终端。我作为硬件开发的老兵&#…...

大模型零样本学习新突破:USP自适应提示方法原理与实践
1. 项目概述:当大模型“自学成才”成为可能作为一名长期在自然语言处理(NLP)一线摸爬滚打的从业者,我见过太多关于大语言模型(LLMs)的“神话”与“现实”之间的落差。其中最让我头疼的一个现实就是…...

SQL Server报错注入原理与三大稳定Payload实战
1. 报错注入不是“碰运气”,而是SqlServer的确定性行为很多人第一次听说“报错注入”时,下意识觉得这是在赌数据库会不会吐错误信息——输个单引号试试,看页面崩不崩;加个AND 1CONVERT(int, (SELECT version)),看是不是…...

远程为海外公司工作的真实体验:钱多事少但有时差——一个软件测试工程师的深度拆解
“月薪五万,睡到自然醒,在海边一边晒太阳一边测Bug。” 这是许多同行对“为海外公司远程工作”的美好想象。但当梦想照进现实,尤其是在我们软件测试这个领域,画面的颗粒度会变得极其复杂。它并非简单的“钱多事少离家近”…...

深入解析TI C6474多核DSP架构:从硬件设计到并行编程实战
1. 项目概述:从单核到多核的必然演进在嵌入式信号处理领域,德州仪器(TI)的TMS320系列DSP一直是高性能、高可靠性的代名词。我接触TI DSP超过十年,从早期的C5000系列到后来的C6000系列,亲眼见证了其从单核、…...

AutoGen 框架深度使用指南
AutoGen 框架深度使用指南:从零搭建多智能体协作系统 1. 引入与连接:你为什么需要AutoGen? 1.1 开场:每个开发者都遇到过的痛点 你有没有过这样的经历:用ChatGPT写了一段Python数据分析代码,复制到本地运行报错,再把报错信息粘贴回去让它改,来回折腾5、6次才跑通;要…...

为什么你的Windows快捷键突然失效?Hotkey Detective一键定位占用程序终极指南
为什么你的Windows快捷键突然失效?Hotkey Detective一键定位占用程序终极指南 【免费下载链接】hotkey-detective A small program for investigating stolen key combinations under Windows 7 and later. 项目地址: https://gitcode.com/gh_mirrors/ho/hotkey-d…...