python实现二叉搜索树(AVL树)简单样例
一、二叉搜索树
class TreeNode:def __init__(self, value):self.value = valueself.left = Noneself.right = Noneclass BinarySearchTree:def __init__(self):self.root = Nonedef insert(self, value):if self.root is None:self.root = TreeNode(value)else:self._insert(self.root, value)def _insert(self, node, value):if value < node.value:if node.left is None:node.left = TreeNode(value)else:self._insert(node.left, value)else:if node.right is None:node.right = TreeNode(value)else:self._insert(node.right, value)def search(self, value):return self._search(self.root, value)def _search(self, node, value):if node is None or node.value == value:return nodeif value < node.value:return self._search(node.left, value)return self._search(node.right, value)# 使用二叉搜索树
bst = BinarySearchTree()
bst.insert(5)
bst.insert(3)
bst.insert(7)
bst.insert(2)
bst.insert(4)# 搜索节点
found_node = bst.search(4)
if found_node:print(f'Node with value {found_node.value} found')
else:print('Node not found')
二、AVL树(平衡二叉搜索树)
AVL树是一种平衡二叉搜索树,它在插入和删除节点后会自动调整树的高度以保持平衡。以下是一个简单的AVL树实现:
class TreeNode:def __init__(self, key):self.key = keyself.left = Noneself.right = Noneself.height = 1class AVLTree:def insert(self, root, key):if not root:return TreeNode(key)elif key < root.key:root.left = self.insert(root.left, key)else:root.right = self.insert(root.right, key)root.height = 1 + max(self.get_height(root.left), self.get_height(root.right))balance = self.get_balance(root)# 左左情况if balance > 1 and key < root.left.key:return self.right_rotate(root)# 右右情况if balance < -1 and key > root.right.key:return self.left_rotate(root)# 左右情况if balance > 1 and key > root.left.key:root.left = self.left_rotate(root.left)return self.right_rotate(root)# 右左情况if balance < -1 and key < root.right.key:root.right = self.right_rotate(root.right)return self.left_rotate(root)return rootdef left_rotate(self, z):y = z.rightT2 = y.lefty.left = zz.right = T2z.height = 1 + max(self.get_height(z.left), self.get_height(z.right))y.height = 1 + max(self.get_height(y.left), self.get_height(y.right))return ydef right_rotate(self, z):y = z.leftT3 = y.righty.right = zz.left = T3z.height = 1 + max(self.get_height(z.left), self.get_height(z.right))y.height = 1 + max(self.get_height(y.left), self.get_height(y.right))return ydef get_height(self, root):if not root:return 0return root.heightdef get_balance(self, root):if not root:return 0return self.get_height(root.left) - self.get_height(root.right)def pre_order(self, root):if not root:returnprint("{0} ".format(root.key), end="")self.pre_order(root.left)self.pre_order(root.right)# 使用AVL树
my_tree = AVLTree()
root = None
nums = [10, 20, 30, 40, 50, 25]for num in nums:root = my_tree.insert(root, num)print("Preorder traversal of the AVL tree is:")
my_tree.pre_order(root)
相关文章:
简单样例)
python实现二叉搜索树(AVL树)简单样例
一、二叉搜索树 class TreeNode:def __init__(self, value):self.value valueself.left Noneself.right Noneclass BinarySearchTree:def __init__(self):self.root Nonedef insert(self, value):if self.root is None:self.root TreeNode(value)else:self._insert(self.…...

Day47 打家劫舍123
198 打家劫舍 题目链接:198.打家劫舍 你是一个专业的小偷,计划偷窃沿街的房屋。每间房内都藏有一定的现金,影响你偷窃的唯一制约因素就是相邻的房屋装有相互连通的防盗系统,如果两间相邻的房屋在同一晚上被小偷闯入,…...

OceanBase 开源社区新进展|obdiag SIG成立
为了构建完善的 OceanBase 诊断生态系统,汇聚各方力量,形成涵盖工具、知识在内的全方位诊断生态体系,助力开发者更高效地驾驭 OceanBase,OceanBase 社区宣布成立诊断 SIG,名称:obdiag SIG。 详情参加原文链…...
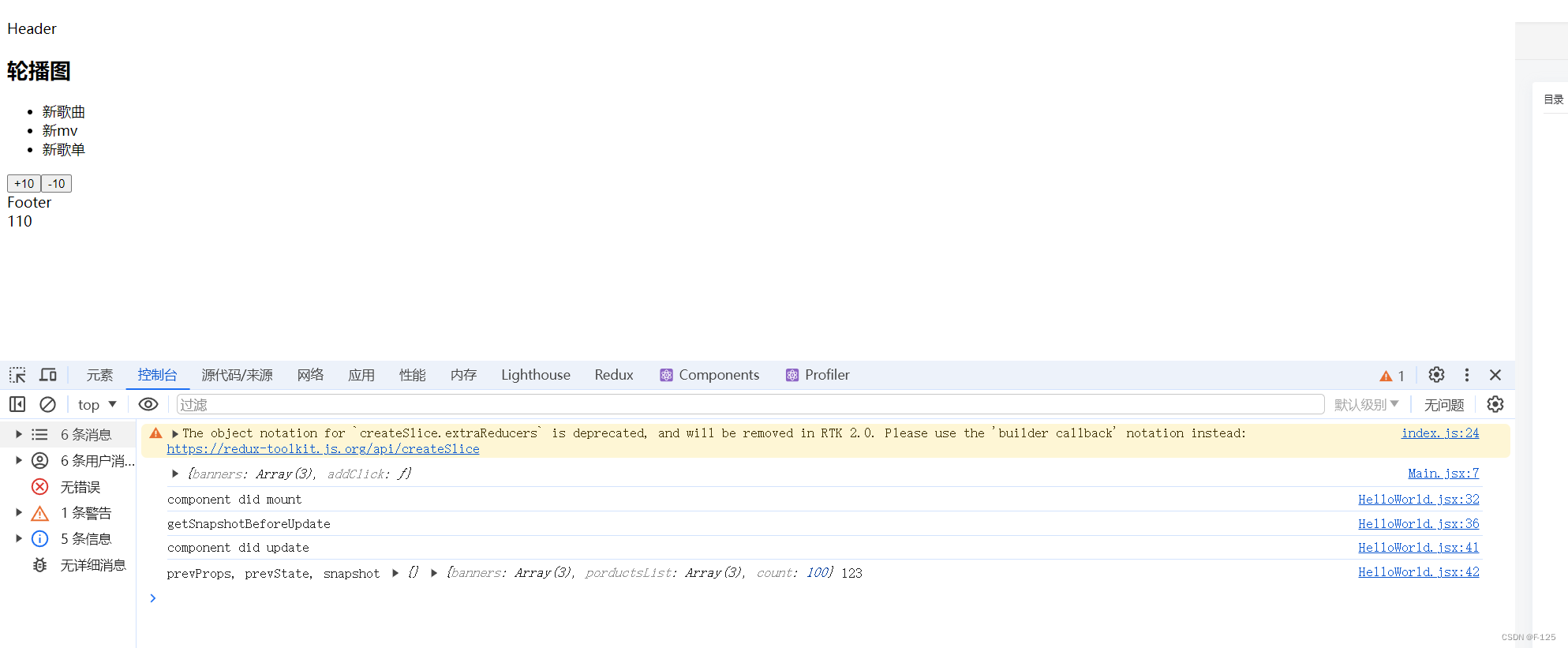
React类组件生命周期详解
在React的类组件中,从组件创建到组件被挂载到页面中,这个过程react存在一系列的生命周期函数,最主要的生命周期函数是componentDidMount、componentDidUpdate、componentWillUnmount 生命周期图例如下 1. componentDidMount组件挂载 如果你…...
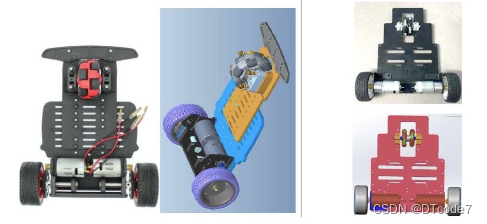
智能车竞赛指南:从零到一,驶向自动驾驶的未来
智能车竞赛指南:从零到一,驶向自动驾驶的未来 一、智能车竞赛概览1.1 竞赛介绍1.2 竞赛分类 二、智能车开发技术基础2.1 硬件平台2.2 软件开发 三、实战案例:循线小车开发3.1 系统架构3.2 代码示例 四、技术项目:基于ROS的视觉导航…...
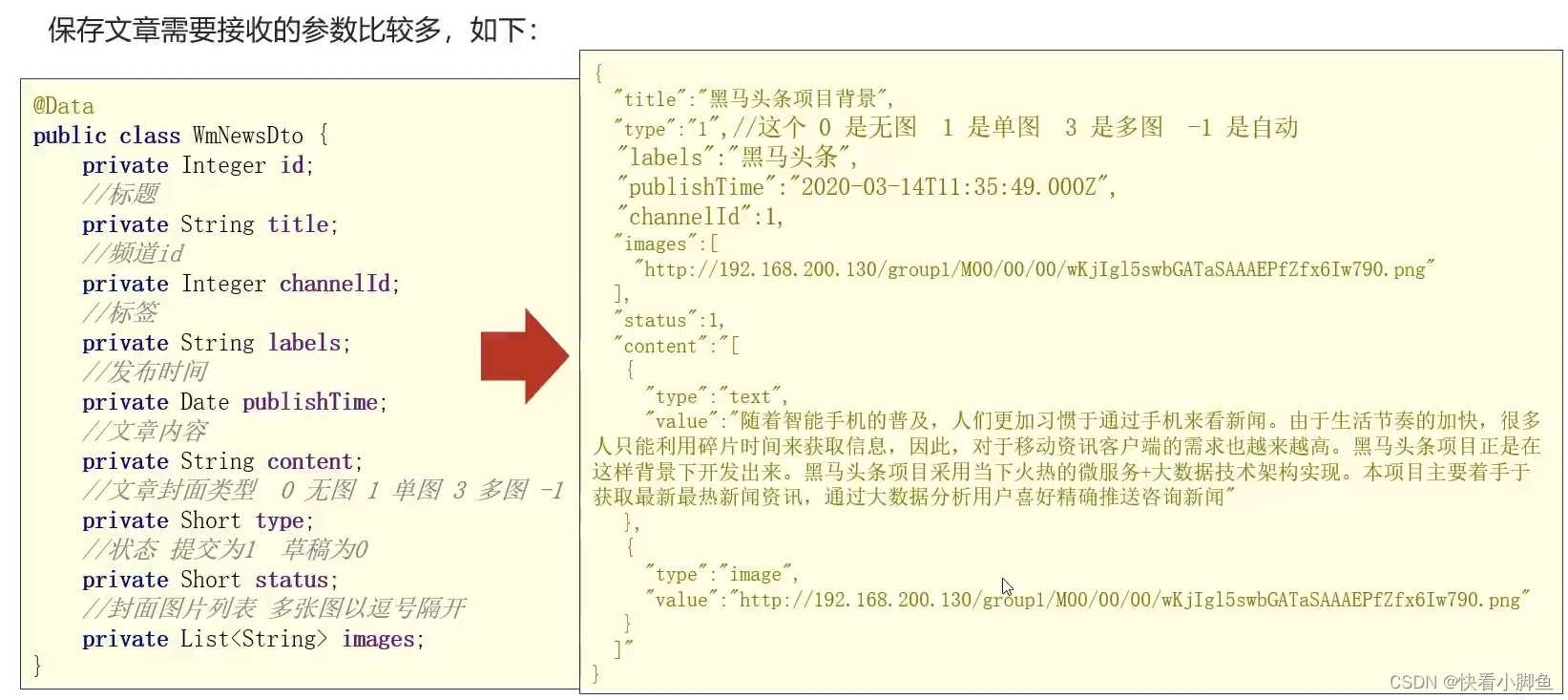
微服务项目收获和总结---第2,3天(分库分表思想,文章业务)
①分库分表思想 文章表一对一为什么要拆分?因为文章的内容会非常大,查询效率会很低,我们经常操作文章的基本信息,不会很经常查询文章内容。充分发挥高频数据的操作效率。 ②freemarker和minIO 由于文章内容数据量过大,…...
【全网最全】2024电工杯数学建模A题21页初步参考论文+py代码+保奖思路等(后续会更新)
您的点赞收藏是我继续更新的最大动力! 一定要点击如下的卡片链接,那是获取资料的入口! 【全网最全】2024电工杯数学建模A题21页初步参考论文py代码保奖思路等(后续会更新成品论文)「首先来看看目前已有的资料&#x…...
)
怎么通过OpenAI API调用其多模态大模型(GPT-4o)
现在只要有额度,大家都可以调用OpenAI的多模态大模型了,例如GPT-4o和GPT-4 Turbo,我一年多前总结过一些OpenAI API的用法,发现现在稍微更新了一下。主要参考了这里:https://platform.openai.com/docs/guides/vision 其…...
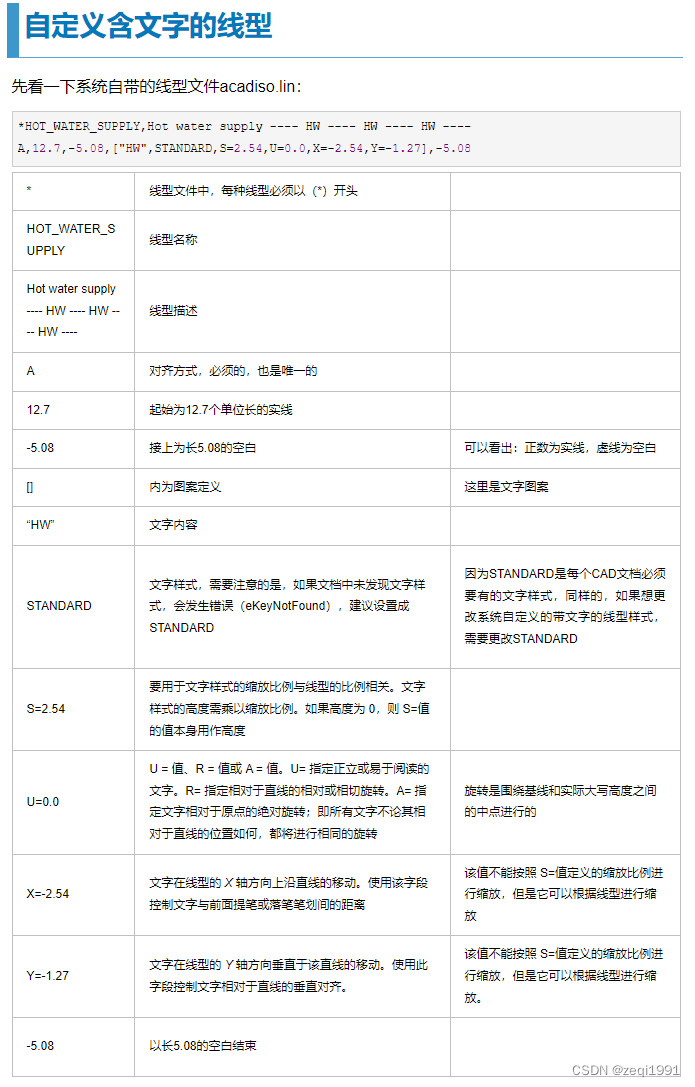
自定义文字线性
...
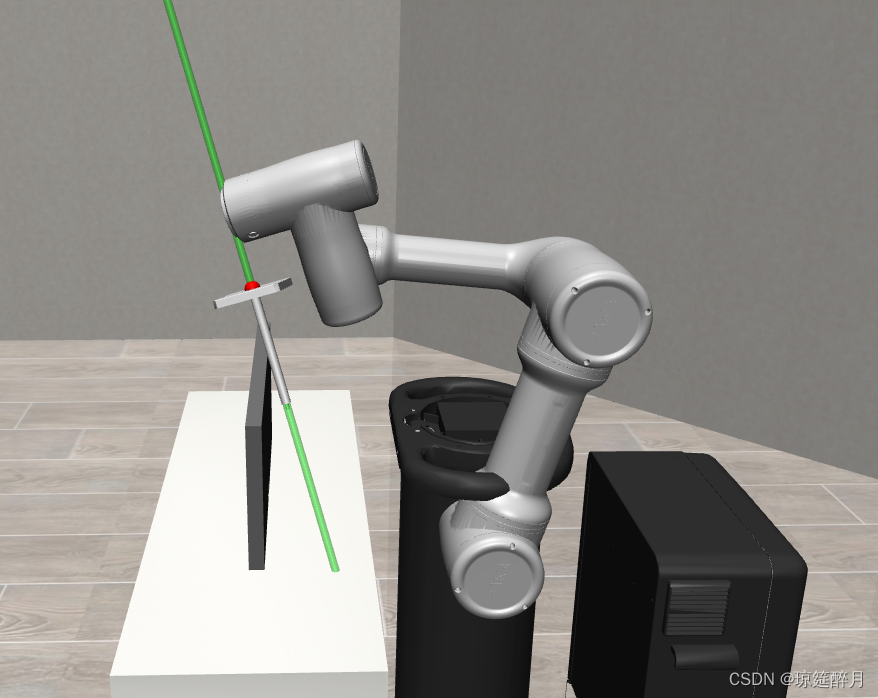
robosuite导入自定义机器人
目录 目的:案例一:成果展示具体步骤:URDF文件准备xml文件生成xml修改机器人构建 目的: 实现其他标准/非标准机器人的构建 案例一: 成果展示 添加机器人JAKA ZU 7 这个模型 具体步骤: URDF文件准备 从…...

四天学会JS高阶(学好vue的关键)——构造函数数据常用函数(理论+实战)(第二天)
一、对象创建引发构造函数产生 1.1 创建对象三种方式: 利用对象字面量创建对象 const obj {name: 佩奇}注:对象字面量的由来:即它是直接由字面形式(由源代码直接)创建出来的对象,而不是通过构造函数或者…...
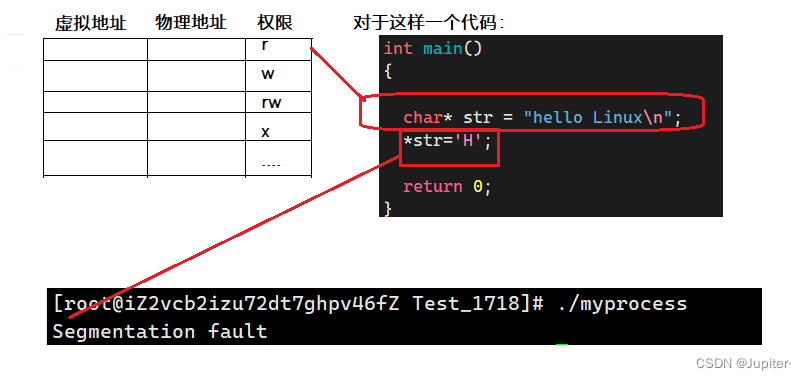
【Linux学习】进程地址空间与写时拷贝
文章目录 Linux进程内存布局图:内存布局的验证 进程地址空间写时拷贝 Linux进程内存布局图: 地址空间的范围,在32位机器上是2^32比特位,也就是[0,4G]。 内存布局的验证 代码验证内存布局: 验证代码: #include<s…...

Git远程控制
文章目录 1. 创建仓库1.1 Readme1.2 Issue1.3 Pull request 2. 远程仓库克隆3. 推送远程仓库4. 拉取远程仓库5. 配置Git.gitignore配置别名 使用GitHub可以,采用Gitee也行 1. 创建仓库 1.1 Readme Readme文件相当于这个仓库的说明书,gitee会初始化2两份…...
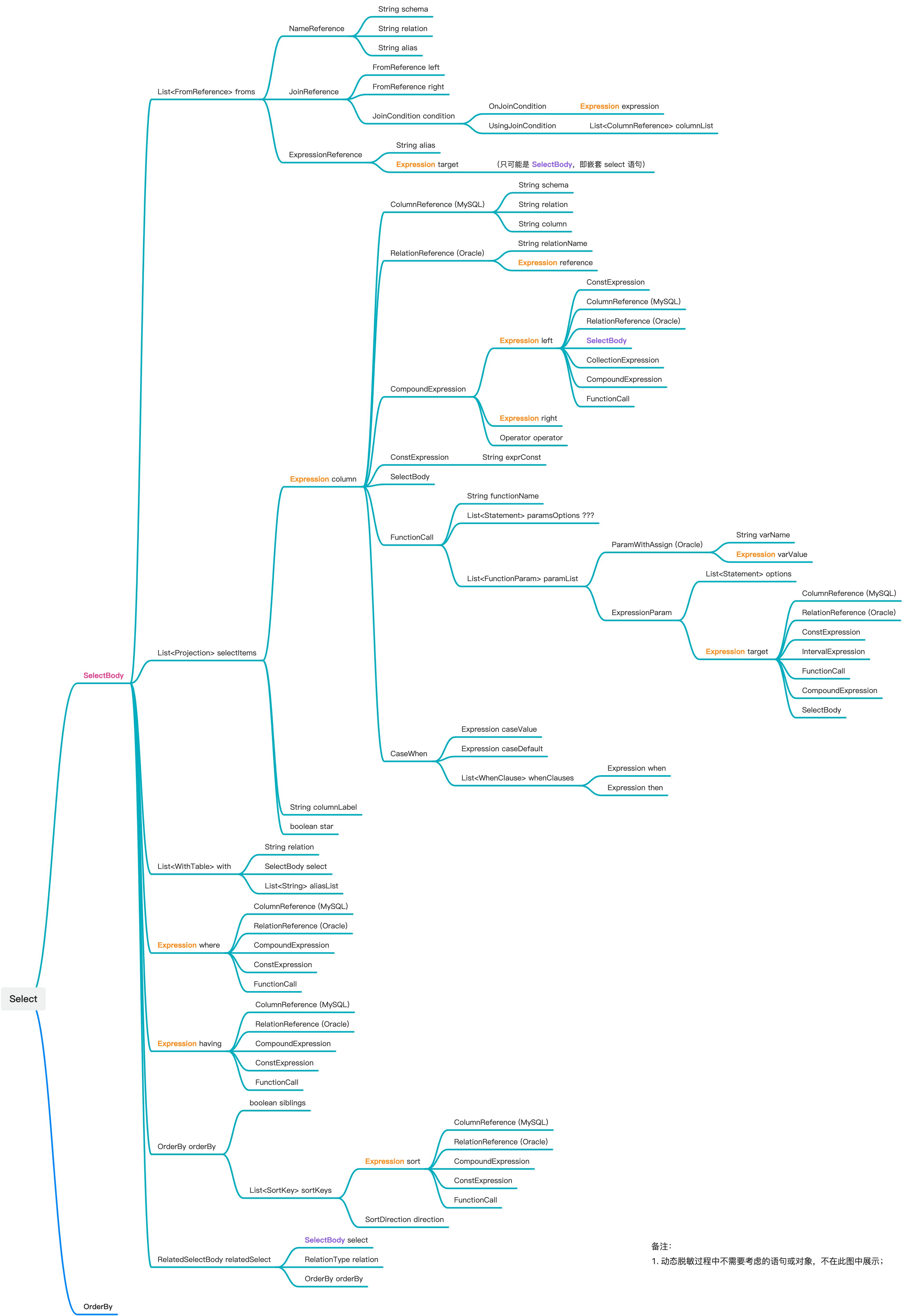
怎样从SQL中分析和提取访问的字段信息?| OceanBase实践
当执行任意一条SELECT SQL语句时,我们如何能够分析出所访问的字段信息,并进一步判断结果集中的每一列数据具体来自于哪些数据库、表以及表中的哪些字段呢?本文将会详细阐述针对此问题的技术解决方案。 应用场景 从 SQL 中解析访问的原始字段…...
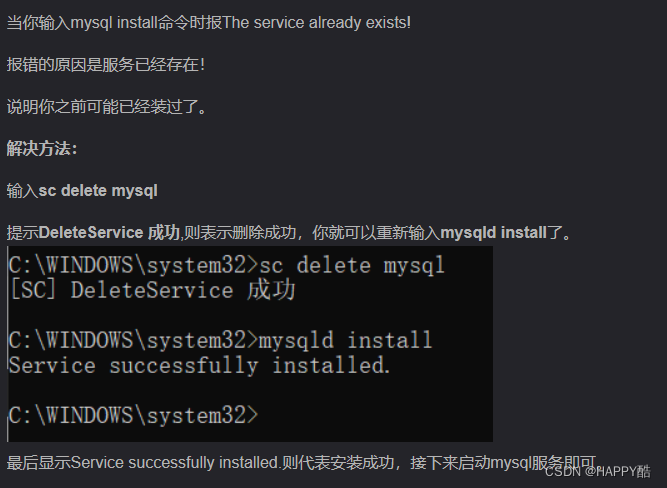
MySQL 服务无法启动
常见原因: 检查端口占用: 使用命令行工具(如netstat)来检查3306端口是否已被其他程序占用,输入netstat -ano(Windows)或netstat -tulnp | grep 3306(Linux/Mac)来查找3306端口的占用情况。如果…...

Python贪心算法
贪心算法(Greedy Algorithm)是一种常见的算法设计策略,它在每一步选择当前最优解,希望通过局部最优解最终得到全局最优解。贪心算法通常适用于满足一些特定条件的问题,例如货币找零、活动选择、任务调度等。贪心算法的…...
牛客网刷题 | BC85 牛牛学数列3
目前主要分为三个专栏,后续还会添加: 专栏如下: C语言刷题解析 C语言系列文章 我的成长经历 感谢阅读! 初来乍到,如有错误请指出,感谢! 描述 牛牛准备继续进阶&…...
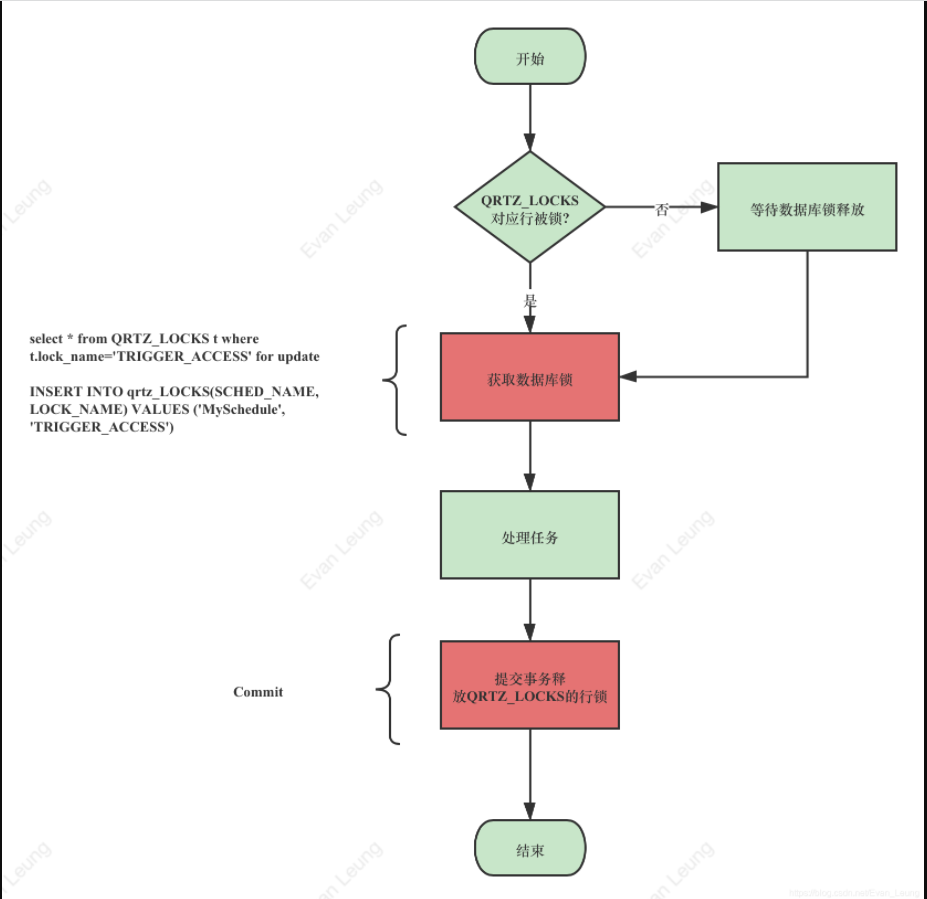
quartz定时任务
Quartz 数据结构 quartz采用完全二叉树:除了最后一层每一层节点都是满的,而且最后一层靠左排列。 二叉树节点个数规则:每层从左开始,第一层只有一个,就是2的0次幂,第二层两个就是2的1次幂,第三…...
——选择结构与循环结构)
Python基础学习笔记(五)——选择结构与循环结构
目录 程序的组织结构条件选择结构1. 单分支结构2. 双分支结构3. 多分支结构4. 嵌套(分支)结构5. 无内容执行6. 条件表达式 循环结构1. 可迭代对象2. range()函数3. for循环语句4. while循环语句5. 结束语句 程序的组织结构 程序的组织结构主要有以下三种…...

Vue插槽solt如何传递具名插槽的数据给子组件?
在Vue中,你可以通过作用域插槽(scoped slots)来传递数据给子组件。这同样适用于具名插槽。首先,你需要在子组件中定义一个具名插槽,并通过v-slot指令传递数据。例如: 子组件(ChildComponent.vu…...
的标准化生成与检验计划集成)
[实战] 制造业质量控制中气泡图(Balloon Drawing)的标准化生成与检验计划集成
前言:2026 年质量管理的数字化底座在 2026 年的数字化工厂环境环境下,质量管理已从被动拦截转向主动预防。作为 FAI(首件检验)和 PPAP(生产件批准程序)流程中的核心环节,气泡图(Ball…...

Skelerealms:Godot开放世界的数据驱动架构解析
1. 这不是又一个“Godot RPG模板”,而是一套为开放世界量身定制的底层骨架我第一次在GitHub上看到Skelerealms这个仓库时,没点开README就直接关掉了——标题里带“RPG框架”“Godot”“开放世界”的项目,过去三年我至少扫过四十七个ÿ…...

【 Godot 4 学习笔记】命名规范
命名规范类型命名规范示例文件与文件夹snake_case (蛇形)player_controller.gd, assets/类名 / 脚本名PascalCase (大驼峰)PlayerController, YAMLParser场景节点名PascalCase (大驼峰)HitBox, Camera3D, Player函数 / 方法snake_case (蛇形)func load_level():变量 / 信号snak…...

瑞萨MCU集成AI加速器:嵌入式开发者的边缘智能实战指南
1. 项目概述:当传统MCU巨头按下AI加速键最近在半导体圈里,一个消息引发了不小的讨论:瑞萨电子,这家在微控制器领域常年稳坐头把交椅的巨头,宣布要全面拥抱人工智能。你可能对这个名字有点陌生,但你的车里、…...

企业级AI Agent架构选型:Shallow、ReAct与Deep实战对比
1. 项目概述:为什么企业级AI系统必须严肃对待Agent架构选型“Choosing AI Agent Architecture for Enterprise Systems: Shallow vs ReAct vs Deep”——这个标题不是学术论文的冷门副标题,而是我过去18个月在三家不同规模企业落地AI智能体(A…...

MQTTClient技术深度解析:嵌入式物联网通信的高性能解决方案
MQTTClient技术深度解析:嵌入式物联网通信的高性能解决方案 【免费下载链接】mqttclient A high-performance, high-stability, cross-platform MQTT client, developed based on the socket API, can be used on embedded devices (FreeRTOS / LiteOS / RT-Thread …...

你的 FlashAttention 真的在跑吗?几个简单方法确认
之前有个朋友在昇腾 NPU 上部署模型,按文档开了 --enable-flash-attn,跑起来也没报错。但他总觉得延迟不对——跟之前没开的时候差不多。他问我:怎么确认 FlashAttention 真的生效了?不会是静默降级了吧? 这个问题问得…...

Agentic o3调度器与Gemma/Nemotron-H推理范式演进
1. 项目概述:一场悄然发生的模型推理范式迁移最近在几个核心AI工程团队的内部技术简报里,反复看到一个代号“TAI#149”的专项分析报告被高频引用——它不是某家公司的新品发布会通稿,而是一份由一线模型部署工程师自发整理、持续迭代的实战观…...
Transformer核心机制深度解析:从公式到CUDA核的工程真相
1. 这不是又一篇“Transformer原理复述”,而是一次工程师视角的机制解剖你点开这篇文章,大概率不是为了再听一遍“Self-Attention就是计算相似度”这种教科书定义。我干了十多年AI系统架构和模型部署,从2017年Transformer论文刚出来那会儿就在…...

大模型生产环境中的行为漂移监控:从生存驱动到可测可控
1. 这不是科幻片,而是我们正在调试的模型行为现象“AI模型是否发展出了生存驱动”——这个标题在2025年春季突然密集出现在主流科技媒体、AI伦理专栏甚至哲学播客中,背后不是某篇新论文的发布,而是一连串真实发生、可复现、被多个独立实验室记…...