在RT-Thread下为MPU手搓以太网MAC驱动-4
文章目录
- MAC驱动里面对MDIO的支持
- MAC驱动与MDIO总线
这是个人驱动开发过程中做的一些记录,仅代表个人意见和理解,不喜勿喷
- MAC驱动需要支持不同的PHY芯片
MAC驱动里面对MDIO的支持
在第一篇文章中提到对MAC设备做出了抽象,其中MAC抽象里面有提供通过MDIO总线去访问PHY寄存器的读写操作接口(有省去其他操作接口)
struct h3_macplib_ops
{int32_t (*macdev_writephy)(mac_dev *const dev, uint16_t addr, uint16_t reg, uint16_t data);int32_t (*macdev_readphy) (mac_dev *const dev, uint16_t addr, uint16_t reg, uint16_t *val);
};
那我们同时也需要实现一个MDIO设备驱动,因为在RT-Thread下也有定义MDIO相关的操作接口。
struct rt_mdio_bus_ops
{rt_bool_t (*init)(void *bus, rt_uint32_t src_clock_hz);rt_size_t (*read)(void *bus, rt_uint32_t addr, rt_uint32_t reg, void *data, rt_uint32_t size);rt_size_t (*write)(void *bus, rt_uint32_t addr, rt_uint32_t reg, void *data, rt_uint32_t size);rt_bool_t (*uninit)(void *bus);
};struct rt_mdio_bus
{void *hw_obj;char *name;struct rt_mdio_bus_ops *ops;
};
我们可以看到在RT-Thread下对MDIO设备和驱动接口也做了抽象的定义,比如MDIO驱动的操作接口包括初始化、读、写和解除初始化操作。对于MDIO设备,其包含对应的硬件内容,MDIO设备名和操作接口
static struct rt_mdio_bus_ops h3_mdiobus_ops =
{.init = h3_mdioplib_init,.read = h3_mdioplib_read,.write = h3_mdioplib_write,.uninit = RT_NULL,
};
在mac驱动下,MDIO设备驱动的读取接口实现如下,在这个驱动接口实现中,我们通过获取MDIO总线下包含的硬件信息,做一个类型的强制转换,获取到了指向macplib_dev实例的指针,然后就可以通过这个macplib_dev访问mac设备抽象接口提供的PHY寄存器访问操作,实现了MDIO的读操作,整个代码还是相当的简单。
static rt_size_t h3_mdioplib_read(void *bus, rt_uint32_t addr,rt_uint32_t reg, void *data, rt_uint32_t size)
{rt_uint16_t val;rt_uint32_t *data_ptr = (rt_uint32_t *)data;struct h3_macplib_dev *macplib_dev;struct rt_mdio_bus *mdioplib_bus = (struct rt_mdio_bus *)bus;RT_ASSERT(data != NULL);RT_ASSERT(bus != NULL);if (4 != size) {return 0;}macplib_dev = (struct h3_macplib_dev *)mdioplib_bus->hw_obj;macplib_dev->mac_ops->macdev_readphy(&macplib_dev->mac_dev,(rt_uint16_t)addr, (rt_uint16_t)reg,&val);/* Get data from MII register. */*data_ptr = (rt_uint32_t)val;return 4;
}
在mac驱动下另外一个需要注意的地方是,mac驱动需要提供一个类似mdio驱动查找接口,用于PHY设备在初始化的时候,查找需要的MDIO设备驱动接口,用来实现对PHY寄存器的访问,代码实现如下。
rt_mdio_t *h3_mdioplib_search(const char *name)
{rt_uint32_t table_sz = sizeof(h3_macplib_devtable)/sizeof(uint32_t);struct h3_macplib_dev *macplib_dev;for (uint32_t i = 1; i < table_sz; i++){macplib_dev = h3_macplib_devtable[i];if (rt_strcmp(name, macplib_dev->rt_mdiobus.name) == 0){return &macplib_dev->rt_mdiobus;}}return NULL;
}
在PHY驱动中,对PHY设备的抽象定义时,增加了一个mdio_name的定义,用于定义该PHY设备对应的MDIO总线设备名,然后PHY设备可以通过该mdio_name名字,去查找到对应的MDIO总线设备。
struct h3_kszplib_dev
{const char *phy_name;uint32_t phy_addr;const char *mdio_name;struct rt_phy_device rt_phydev;
} ;
static rt_phy_status h3_ksz9plib_init(struct rt_phy_device *phy, void *object,rt_uint32_t phy_addr, rt_uint32_t src_clock_hz)
{rt_bool_t ret;rt_phy_status result = PHY_STATUS_FAIL;rt_uint32_t counter = PHY_TIMEOUT_COUNT;rt_uint32_t regval = 0;rt_uint32_t deviceID = 0;struct rt_mdio_bus *mdio_bus;struct h3_kszplib_dev *kszplib_dev;RT_ASSERT(phy != RT_NULL);kszplib_dev = rt_container_of(phy, struct h3_kszplib_dev, rt_phydev);mdio_bus = h3_mdioplib_search(kszplib_dev->mdio_name);RESULT_MATCH_CHECK(mdio_bus, RT_NULL, outs)kszplib_dev->phy_addr = phy_addr;phy->bus = mdio_bus;phy->addr = phy_addr;ret = mdio_bus->ops->init(mdio_bus, src_clock_hz);NOT_MATCH_CHECK(ret, RT_TRUE, outs)/* Initialization after PHY stars to work. */do{h3_kszplib_read(phy, GMII_PHYID1, &deviceID);counter--;} while ((deviceID != GMII_PHYID1_KSZ9131) && (counter != 0));RESULT_MATCH_CHECK(counter, 0, outs)result = h3_kszplib_read(phy, GMII_MCR, ®val);RESULT_MATCH_CHECK(result, PHY_STATUS_FAIL, outs)regval |= GMII_MCR_ANENABLE | GMII_MCR_ANRESTART;result = h3_kszplib_write(phy, GMII_MCR, regval);RESULT_MATCH_CHECK(result, PHY_STATUS_FAIL, outs)counter = PHY_TIMEOUT_COUNT;/* Check auto negotiation complete. */do{result = h3_kszplib_read(phy, GMII_MSR, ®val);RESULT_MATCH_CHECK(result, PHY_STATUS_FAIL, outs)if ((regval & GMII_MSR_ANEGCOMPLETE) != 0){break;}} while (--counter > 1);outs:return result;
}
MAC驱动与MDIO总线
在mac设备的抽象中,由于都包含了rt_mdio_bus,因此在mac设备实例的初始化的时候,都将mac设备与其提供的mdio总线进行绑定,例如在实例初始化时的静态绑定。
struct h3_macplib_dev
{const char *name;IRQn_Type irqnum;H3_MAC_REGS regs;rt_uint8_t mac_addr[6];rt_uint8_t dev_id;rt_uint8_t reserved;mac_async_dev mac_dev;phy_async_dev phy_dev;const struct rt_mdio_bus_ops *mdio_ops;const struct h3_macplib_ops *mac_ops;struct rt_mdio_bus rt_mdiobus;struct eth_device rt_ethdev;
} ;
#if defined(BSP_USING_GMAC0) || defined(BSP_USING_EMAC0)
struct h3_macplib_dev h3_macdev0 = {.name = "e0",.irqnum = MAC0_IRQn,.regs = MAC0_REGS,.dev_id = MAC0_ID,.rt_mdiobus ={.name = MDIO0_DEVICE_NAME,.ops = &h3_mdiobus_ops,},.phy_dev ={.name = PHY0_DEVICE_NAME,.phyID1 = H3_MACPLIB_PHY0ID1,.phyID2 = H3_MACPLIB_PHY0ID2,.phyaddr = PHY0_DEVICE_ADDRESS,},.mac_ops = &h3_macdev_ops,
};
#endif
初始化时的绑定(仅展示部分相关代码)。
int h3_macplib_init(void)
{rt_err_t state;rt_uint32_t table_sz = sizeof(h3_macplib_devtable)/sizeof(uint32_t);struct h3_macplib_dev *macplib_dev;for (uint32_t i = 1; i < table_sz; i++){macplib_dev = h3_macplib_devtable[i];macplib_dev->mac_dev.devid = macplib_dev->dev_id;macplib_dev->rt_mdiobus.hw_obj = (void *)macplib_dev;}
}
到此为止,mac驱动接口、PHY驱动接口和MDIO驱动接口,设备的抽象、接口的实现以及彼此之间的关系讲解完成。
相关文章:

在RT-Thread下为MPU手搓以太网MAC驱动-4
文章目录 MAC驱动里面对MDIO的支持MAC驱动与MDIO总线 这是个人驱动开发过程中做的一些记录,仅代表个人意见和理解,不喜勿喷 MAC驱动需要支持不同的PHY芯片 MAC驱动里面对MDIO的支持 在第一篇文章中提到对MAC设备做出了抽象,其中MAC抽象里面有…...
可的哥(Codigger)推出Monaco编辑器插件,提升编程体验
Monaco编辑器,作为业界领先的代码编辑器,在编程体验中发挥着不可或缺的重要作用,能够在多种编程语言和开发环境中表现出色,为开发者提供高效、便捷的编程环境。可的哥(Codigger)在应用商店上线Monaco编辑器…...

为什么选择mobx
对于React而言,大家熟能而详的是redux,但我们的项目用的是mobx,接下来就让我给你详细说下它的优势和不足,可以参考。 MobX是什么? MobX 是一种简单易用的状态管理库,它采用基于观察者的模式,可…...

如何解决段转储问题
非常恶心 ,这个问题困了我一个月,怀疑过代码有问题 ,怀疑过数据集没处理好,怀疑过环境没有配置好,尝试改动,跑过很多次,还是段转储报错卡住。。。 然后一个月荒废,打算放弃这个模型…...

【杂谈】AIGC之ChatGPT-与智能对话机器人的奇妙对话之旅
与智能对话机器人的奇妙对话之旅 引言 在数字时代的浪潮中,ChatGPT如同一位智慧的旅伴,它不仅能够与我们畅谈古今,还能解答我们的疑惑,成为我们探索知识海洋的得力助手。今天,就让我们走进ChatGPT的世界,…...

CentOS7配置国内清华源并安装docker-ce以及配置docker加速
说明 由于国内访问国外的网站包括docker网站,由于种种的原因经常打不开,或无法访问,所以替换成国内的软件源和国内镜像就是非常必要的了,这里整理了我安装配置的基本的步骤。 国内的软件源有很多,这里选择清华源作为…...

JL-03-Y1 清易易站
产品概述 清易易站是清易电子新研发的一体式气象站,坚持科学化和人文化相结合的设计理念,应用新检测原理研发的传感器观测各类气象参数,采用社会上时尚的工艺理念设计气象站的整体结构,实现了快速观测、无线传输、数据准确、精度较…...
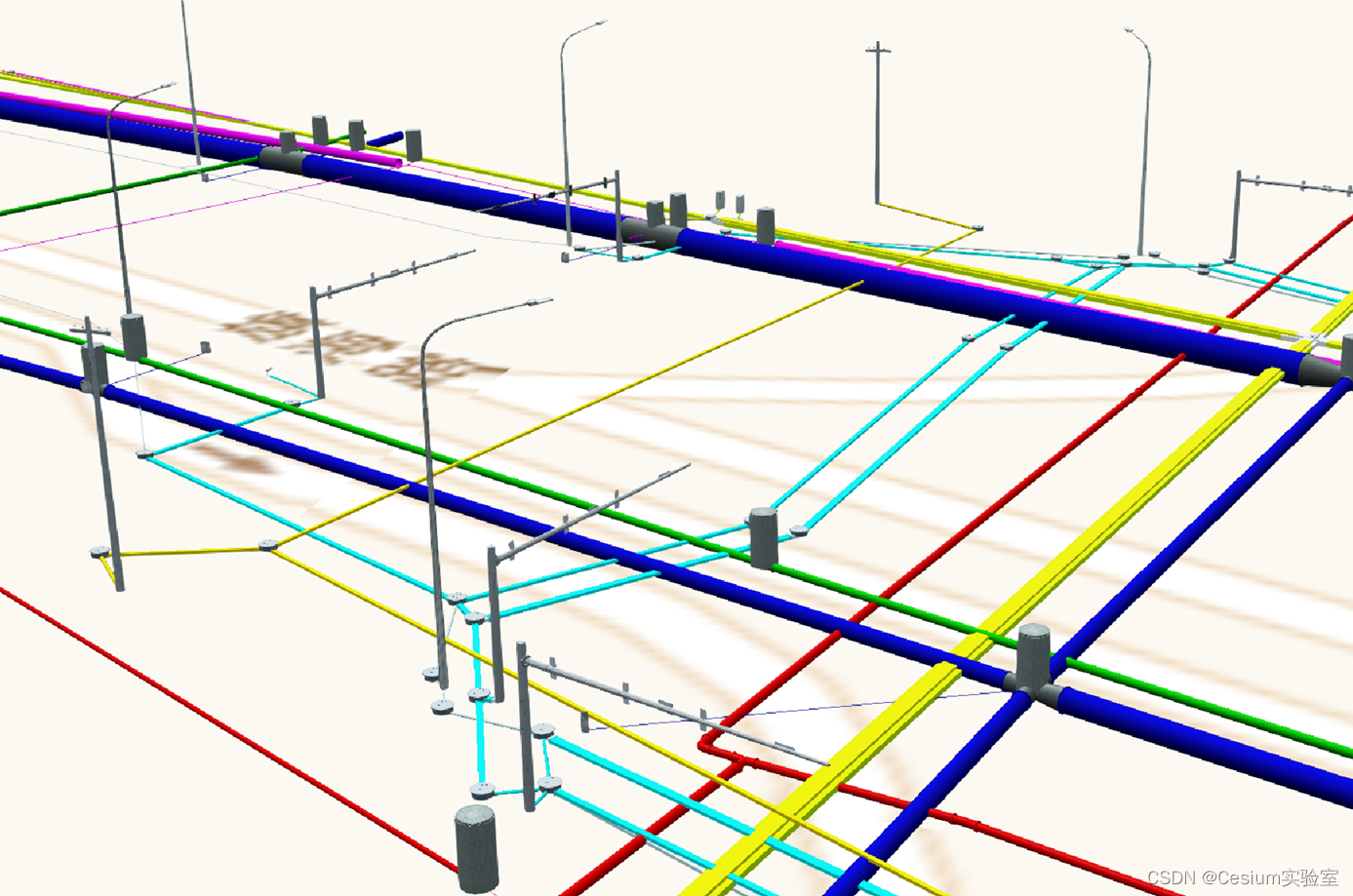
PipeSer管线管网云服务
行业需求 地下管网,作为现代城市不可或缺的基础设施,堪称城市的“地下生命线”。它承载着城市的供水、排水、燃气、电力、通信等重要功能,是确保城市正常运转和居民生活便利的关键所在。将地下管网的复杂布局和运行状态以三维形式直观展现出来…...

kubesphere报错
1.安装过程报错unable to sign certificate: must specify a CommonName [rootnode1 ~]# ./kk init registry -f config-sample.yaml -a kubesphere.tar.gz _ __ _ _ __ | | / / | | | | / / | |/ / _ _| |__ ___| |/…...
【QT5】<总览二> QT信号槽、对象树及样式表
文章目录 前言 一、QT信号与槽 1. 信号槽连接模型 2. 信号槽介绍 3. 自定义信号槽 二、不使用UI文件编程 三、QT的对象树 四、添加资源文件 五、样式表的使用 六、QSS文件的使用 前言 承接【QT5】<总览一> QT环境搭建、快捷键及编程规范。若存…...

2024.05.24 校招 实习 内推 面经
绿*泡*泡VX: neituijunsir 交流*裙 ,内推/实习/校招汇总表格 1、实习丨蔚来2025届实习生招募计划开启(内推) 实习丨蔚来2025届实习生招募计划开启(内推) 2、校招&实习丨联芯集成电路2025届暑期实习…...
如何理解 Java 8 引入的 Lambda 表达式及其使用场景
Lambda表达式是Java 8引入的一项重要特性,它使得编写简洁、可读和高效的代码成为可能。Lambda表达式本质上是一种匿名函数,能够更简洁地表示可传递的代码块,用于简化函数式编程的实现。 一、Lambda表达式概述 1. 什么是Lambda表达式 Lambd…...

GPT-4与GPT-4O的区别详解:面向小白用户
1. 模型介绍 在人工智能的语言模型领域,OpenAI的GPT-4和GPT-4O是最新的成员。这两个模型虽然来源于相同的基础技术,但在功能和应用上有着明显的区别。 GPT-4:这是一个通用型语言模型,可以理解和生成自然语言。无论是写作、对话还…...

使用throttle防止按钮多次点击
背景:如上图所示,点击按钮,防止按钮点击多次 <div class"footer"><el-button type"primary" click"submitThrottle">发起咨询 </el-button> </div>import { throttle } from loda…...
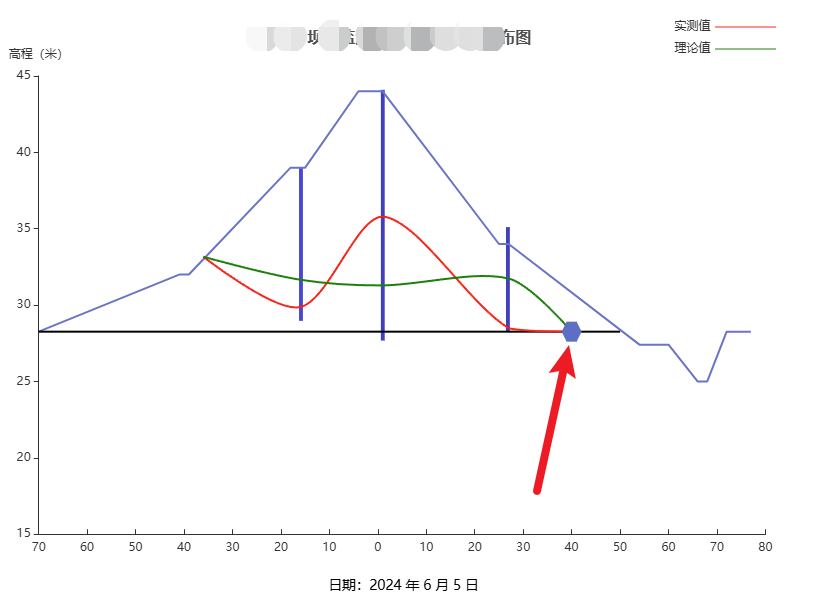
Echarts 在折线图的指定位置绘制一个图标展示
文章目录 需求分析需求 在线段交汇处用一个六边形图标展示 分析 可以使用 markPoint 和 symbol 属性来实现。这是一个更简单和更标准的方法来添加标记点在运行下述代码后,你将在浏览器中看到一个折线图,其中在 [3, 35] (即图表中第四个数据点 Thu 的 y 值为 35 的位置)处…...
适用于 Windows 的 8 大数据恢复软件
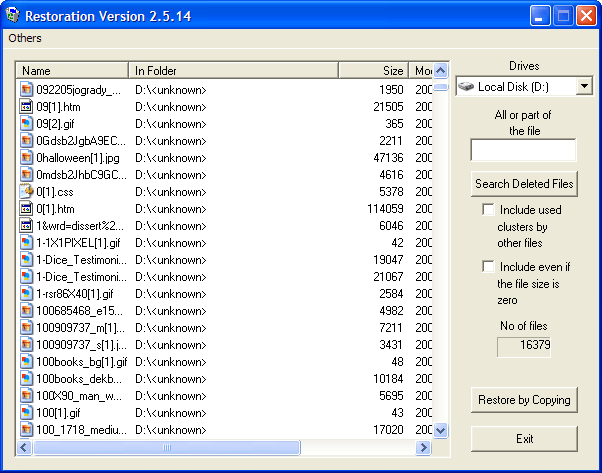
数据恢复软件可帮助您恢复因意外删除或由于某些技术故障(如硬盘损坏等)而丢失的数据。这些工具可帮助您从硬盘驱动器 (HDD) 中高效地恢复丢失的数据,因为这些工具不支持从 SSD 恢复数据。重要的是要了解,您删除的数据不会被系统永…...
HTTP基础
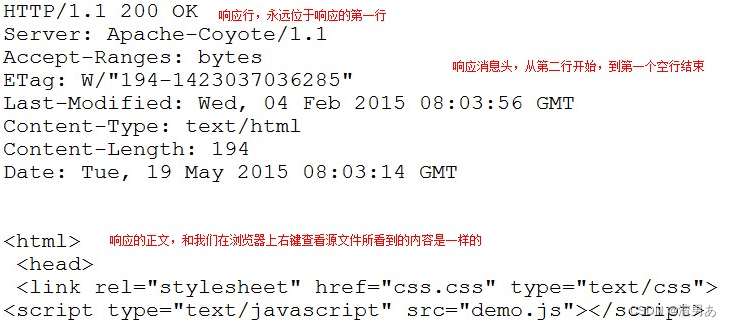
一、HTTP协议 1、HTTP协议概念 HTTP的全称是:Hyper Text Transfer Protocol,意为 超文本传输协议。它指的是服务器和客户端之间交互必须遵循的一问一答的规则。形容这个规则:问答机制、握手机制。 它规范了请求和响应内容的类型和格式, 是基于…...

深入了解Linux命令:visudo
深入了解Linux命令:visudo 在Linux系统中,sudo(superuser do)是一个允许用户以其他用户身份(通常是超级用户或其他用户)执行命令的程序。sudo的配置文件/etc/sudoers存储了哪些用户可以执行哪些命令的权限…...
十大排序 —— 希尔排序
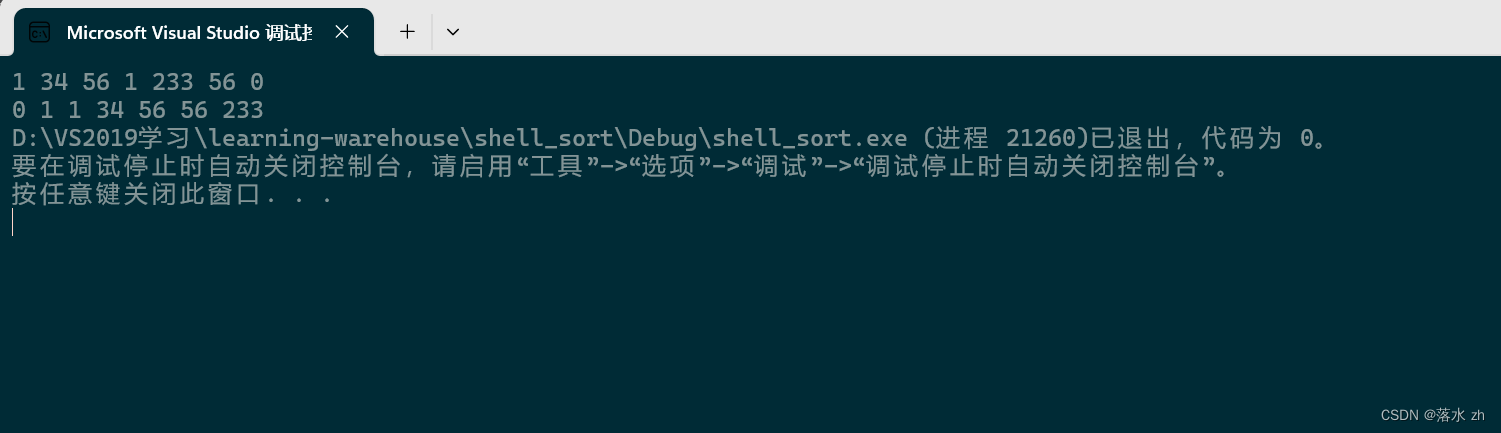
十大排序 —— 希尔排序 什么是希尔排序插入排序希尔排序递归版本 我们今天来看另一个很有名的排序——希尔排序 什么是希尔排序 希尔排序(Shell Sort)是插入排序的一种更高效的改进版本,由Donald Shell于1959年提出。它通过比较相距一定间…...
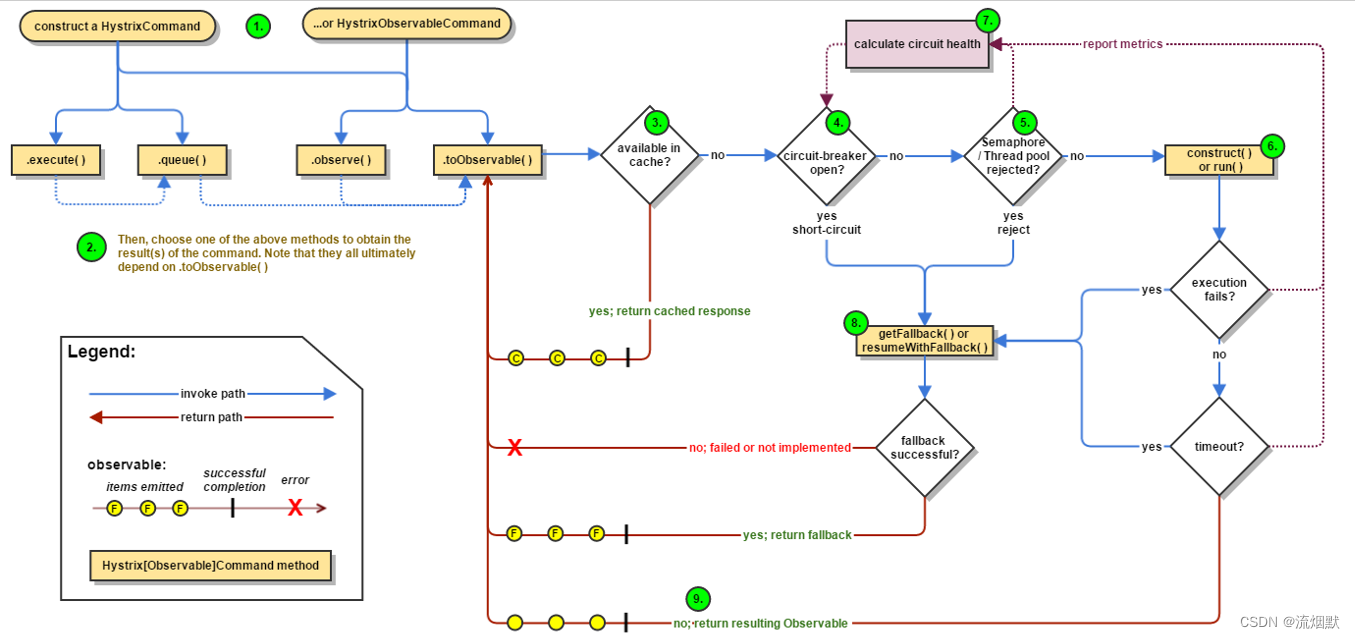
SpringCloud Hystrix服务熔断实例总结
SpringCloud Hystrix断路器-服务熔断与降级和HystrixDashboard SpringCloud Hystrix服务降级实例总结 本文采用版本为Hoxton.SR1系列,SpringBoot为2.2.2.RELEASE <dependency><groupId>org.springframework.cloud</groupId><artifactId>s…...
Pixel Couplet Gen实操手册:自定义门神像素图替换与SVG动画扩展方法
Pixel Couplet Gen实操手册:自定义门神像素图替换与SVG动画扩展方法 1. 项目概述 Pixel Couplet Gen是一款融合传统春节元素与现代像素艺术风格的AI春联生成工具。通过ModelScope大模型的文本生成能力,结合精心设计的8-bit视觉风格,为用户提…...

激发创意:利用快马平台ai模型辅助设计与优化cmhhc算法
激发创意:利用快马平台AI模型辅助设计与优化CMHHC算法 最近在做一个字符串压缩相关的项目,需要实现一个自定义的压缩算法CMHHC。这个算法的核心思想其实很简单:对于连续出现的相同字符,用该字符加上出现次数来表示。比如"aa…...

Linux 内核遍历宏介绍
Linux内核中的遍历宏全面详解 Linux内核中大量使用遍历宏(Iteration Macros)来简化数据结构的遍历操作。这些宏提供了类型安全、简洁且高效的遍历方式,是内核编程的核心范式之一。一、遍历宏的分类 1.1 按功能分类 Linux内核遍历宏 ├── 链…...

Gated DeltaNet 线性注意力:揭秘大模型算力魔咒的破局之道!
文章深入探讨了线性注意力机制在大模型中的重要性,特别是Gated DeltaNet如何通过改变运算顺序,将Transformer的注意力计算复杂度从平方级降低到线性级,从而打破算力瓶颈。文中对比了阿里Qwen、Kimi Linear等模型的线性架构应用,以…...
-- 从高斯消元到对称正定:LU、LDLT与Cholesky分解的算法演进与应用场景)
矩阵分解(1)-- 从高斯消元到对称正定:LU、LDLT与Cholesky分解的算法演进与应用场景
1. 矩阵分解:为什么我们需要它? 想象一下你面前有一堆积木,乱七八糟地堆在一起。如果你想快速找到其中某一块积木,可能需要翻找很久。但如果有人帮你把这些积木按照颜色、形状分类摆放整齐,找起来就会容易得多。矩阵分…...

MDXEditor指令系统详解:如何扩展Markdown语法
MDXEditor指令系统详解:如何扩展Markdown语法 【免费下载链接】editor A rich text editor React component for markdown 项目地址: https://gitcode.com/gh_mirrors/editor/editor MDXEditor是一个功能丰富的React组件,专为Markdown编辑设计&am…...

foobox-cn个性化定制:打造你的专属foobar2000音乐界面
foobox-cn个性化定制:打造你的专属foobar2000音乐界面 【免费下载链接】foobox-cn DUI 配置 for foobar2000 项目地址: https://gitcode.com/GitHub_Trending/fo/foobox-cn 当你每天打开foobar2000时,是否希望看到的不只是一个播放器,…...

告别重复登录:D2RML如何革新暗黑2重制版多开体验
告别重复登录:D2RML如何革新暗黑2重制版多开体验 【免费下载链接】D2RML Diablo 2 Resurrected Multilauncher 项目地址: https://gitcode.com/gh_mirrors/d2/D2RML 作为暗黑破坏神2重制版的忠实玩家,你是否经历过这些令人沮丧的时刻?…...
)
期权到期日别慌!手把手教你搞定上交所股票期权的行权与交割(附避坑清单)
期权到期日实战指南:从行权准备到交割避坑全流程解析 手机屏幕上的红色倒计时提醒着期权合约即将到期,作为刚接触期权交易不久的新手,此刻最需要的不再是复杂的概念解释,而是一份能握在手中的应急操作清单。本文将用最直白的语言拆…...
)
MediaPipe人脸检测避坑指南:如何优化检测精度与性能(含模型选择建议)
MediaPipe人脸检测实战优化:从参数调优到模型部署的完整指南 人脸检测作为计算机视觉的基础任务,其性能直接影响后续的面部分析效果。MediaPipe提供的轻量级解决方案在移动端和边缘设备上表现出色,但实际应用中常遇到误检、漏检或性能瓶颈问题…...