Python | C# | MATLAB 库卡机器人微分运动学 | 欧拉-拉格朗日动力学 | 混合动力控制
🎯要点
🎯正向运动学几何矩阵,Python虚拟机器人模拟动画二连杆平面机械臂 | 🎯 逆向运动学几何矩阵,Python虚拟机器人模拟动画三连杆平面机械臂 | 🎯微分运动学数学形态,Python模拟近似结果 | 🎯欧拉-拉格朗日动力学数学形态,Python模拟机器人操纵器推导的运动方程有效性 | 🎯运动规划算法,Python虚拟机器人和摄像头模拟离线运动规划算法 | 🎯移动导航卡尔曼滤波算法及其它方法,Python虚拟机器人模拟可检测和可磕碰 | 🎯混合动力控制微分数学形态,Python虚拟机器人模拟比例微分积分和逆动态控制 | 🎯阻抗控制,Python模拟二联(三联动)。
🎯 库卡机器人模拟 ,库卡实体机器人对象检测和颜色分割拾取和放置物体 | 🎯 C#远程测试虚拟机器人 | 🎯虚拟机器人从三维文件创建自定义模型。
🎯Cpp(Python)和MATLAB差动驱动ROS Raspberry Pi全功能机器人原型。
🍇Python逆动力学算法
逆动力学是指计算运动中的力。给定配置 q q q、广义速度 q ˙ \dot{ q } q˙ 和广义加速度 q ¨ \ddot{ q } q¨,相当于找到关节扭矩 τ \tau τ 和接触力 f ext f ^{\text {ext } } fext 使得运动约束方程得到满足:
M ( q ) q ¨ + q ˙ ⊤ C ( q ) q ˙ = S ⊤ τ + τ g ( q ) + τ est + J ( q ) ⊤ f ext J ( q ) q ¨ + q ˙ ⊤ H ( q ) q ˙ = 0 \begin{aligned} M ( q ) \ddot{ q }+\dot{ q }^{\top} C ( q ) \dot{ q } & = S ^{\top} \tau + \tau _g( q )+ \tau ^{\text {est }}+ J ( q )^{\top} f ^{\text {ext }} \\ J ( q ) \ddot{ q }+\dot{ q }^{\top} H ( q ) \dot{ q } & = 0 \end{aligned} M(q)q¨+q˙⊤C(q)q˙J(q)q¨+q˙⊤H(q)q˙=S⊤τ+τg(q)+τest +J(q)⊤fext =0
逆动力学的数学函数如下:
( τ , f e x t ) = ID ( q , q ˙ , q ¨ ) \left(\tau, f ^{e x t}\right)=\operatorname{ID}( q , \dot{ q }, \ddot{ q }) (τ,fext)=ID(q,q˙,q¨)
当我们的线性系统完全确定时,该函数定义明确,例如对于具有六个自由度的手臂,但对于在多个接触下的移动机器人,该函数通常是欠确定的。在这种情况下,我们可以将外力的计算转移到例如接触模型,并仅计算关节扭矩:
τ = RNEA ( q , q ˙ , q ¨ , f est ) \tau =\operatorname{RNEA}\left( q , \dot{ q }, \ddot{ q }, f ^{\text {est }}\right) τ=RNEA(q,q˙,q¨,fest )
递归牛顿-欧拉算法为我们提供了一种实现此功能的有效方法。该算法分为两步:前向传递,主要是二阶正向运动学,然后是后向传递,计算力和关节扭矩。
此算法第一遍计算主体速度 v i v _i vi 和加速度 a i a _i ai。从运动树的根 i = 0 i=0 i=0 开始,物体 i i i 的运动 v i , a i v _i, a _i vi,ai 是根据运动 v λ ( i ) , a λ ( i ) v _{\lambda(i)}, a _{\lambda( i)} vλ(i),aλ(i) 其父体 λ ( i ) \lambda(i) λ(i) 的分量,加上它们之间的关节的运动 q ˙ i , q ¨ i \dot{ q }_i, \ddot{ q }_i q˙i,q¨i 引起的分量。让我们从主体速度开始:
v i = i X λ ( i ) v λ ( i ) + S i q ˙ i v _i={ }^i X _{\lambda(i)} v _{\lambda(i)}+ S _i \dot{ q }_i vi=iXλ(i)vλ(i)+Siq˙i
在此方程中, i X λ ( i ) { }^i X _{\lambda(i)} iXλ(i) 是从 λ ( i ) \lambda(i) λ(i) 到 i i i 的 Plücker 变换, S i S _i Si 是关节的运动子空间矩阵。请注意, q ˙ i ∈ R k \dot{ q }_i \in R ^k q˙i∈Rk 是关节的速度,例如对于浮动底座(又名自由飞行器)关节, k = 6 k=6 k=6,对于球形关节, k = 2 k=2 k=2,对于旋转关节或棱柱关节, k = 1 k=1 k=1。无论如何, q ˙ i \dot{ q }_i q˙i 不是广义速度向量 q ˙ \dot{ q } q˙ 的 i th i^{\text {th }} ith 分量(这没有意义,因为 i i i 是关节的索引,而向量 q ˙ \dot{ q } q˙ 按自由度索引)。因此,运动子空间矩阵的维度为 6 × k 6 \times k 6×k。
接下来,让我们假设一个“常见”关节(旋转关节、棱柱关节、螺旋关节、圆柱关节、平面关节、球形关节、自由飞行关节),这样运动子空间矩阵的视在时间导数为零。除非你处理的是不同的关节,否则不要介意这句话。 然后,在前向传递过程中从父关节计算出的主体加速度为:
a i = i X λ ( i ) a λ ( i ) + S i q ¨ i + v i × S i q ˙ i a _i={ }^i X _{\lambda(i)} a _{\lambda(i)}+ S _i \ddot{ q }_i+ v _i \times S _i \dot{ q }_i ai=iXλ(i)aλ(i)+Siq¨i+vi×Siq˙i
到目前为止,该正向传递是二阶正向运动学。一路上我们要计算的最后一件事是由主体运动 v i v _i vi , a i a _i ai产生的主体惯性力:
f i = I i a i + v i × ∗ I i v i − f i est f _i= I _i a _i+ v _i \times{ }^* I _i v _i- f _i^{\text {est }} fi=Iiai+vi×∗Iivi−fiest
我们将在向后传递期间更新这些力向量。请注意,由于它们是力矢量,因此我们的符号意味着 f i ext f _i^{\text {ext }} fiext 也是一个物体力矢量。如果外力在惯性系中表示为 0 f i ext { }^0 f _i^{\text {ext }} 0fiext ,则可以通过以 f i = i X 0 0 f i e x t f _i={ }^i X _0{ }^0 f _i^{e x t} fi=iX00fiext 映射到主体框架 。
此算法的第二遍计算体积力。从运动树的叶节点开始,物体 i i i 的广义力 f i f _i fi 被添加到迄今为止为其父代 λ ( i ) \lambda(i) λ(i) 计算的力 f λ ( i ) f _{\lambda(i)} fλ(i) :
f λ ( i ) = f λ ( i ) + i X λ ( i ) ⊤ f i f _{\lambda(i)}= f _{\lambda(i)}+{ }^i X _{\lambda(i)}^{\top} f _i fλ(i)=fλ(i)+iXλ(i)⊤fi
一旦计算出主体 i i i 上的广义力 f i f _i fi,我们就可以通过沿关节轴投影该 6D 主体矢量来获得相应的关节扭矩 τ i \tau _i τi:
τ i = S i ⊤ f i \tau _i= S _i^{\top} f _i τi=Si⊤fi
对于旋转关节, S i S _i Si 是一个 6 × 1 6 \times 1 6×1 列向量,因此我们以单个数字 τ i = S i ⊤ f i \tau_i= S _i^{\top} f _i τi=Si⊤fi 结尾:关节伺服系统应提供的驱动扭矩提供跟踪 ( q , q ˙ , q ¨ , f e x t ) \left( q , \dot{ q }, \ddot{ q }, f ^{e x t}\right) (q,q˙,q¨,fext)。所有其他组件对应于我们的旋转关节的五度约束,并将由关节的力学被动提供。
现在让我们通过在伪 Python 中执行相同的操作来明确更多的事情。我们的(此算法)函数原型是:
def rnea(q, qd, qdd, f_ext):pass
请注意,q 是每个关节的广义坐标列表,而不是平面数组,其他参数也是如此。特别是,f_ext 是体力矢量 f i ext f _i^{\text {ext }} fiext 的列表。使用 Python 类型注释,我们的原型将如下所示:
from typing import Listimport numpy as npdef rnea(q: List[np.ndarray],qd: List[np.ndarray],qdd: List[np.ndarray],f_ext: List[np.ndarray],
) -> List[np.ndarray]:pass
这种额外的结构允许更通用的关节,例如球形关节(不常见)或用于移动机器人浮动底座的自由飞行关节(常见)。如果所有关节都是旋转的,那么所有类型都将合并为平面阵列。
让我们用 v 0 = 0 v _0= 0 v0=0 表示运动树根链接的空间速度,用 a 0 a _0 a0 表示其空间加速度。我们将它们分别初始化为零和标准重力加速度:
n = len(qd) - 1 # number of links == number of joints - 1
v = [np.empty((6,)) for i in range(n + 1)]
a = [np.empty((6,)) for i in range(n + 1)]
f = [np.empty((6,)) for i in range(n + 1)]
tau = [np.empty(qd[i].shape) for i in range(n + 1)]
v[0] = np.zeros((6,))
a[0] = -np.array([0.0, 0.0, -9.81])
我们继续前向传递,范围从链接 i = 1 i=1 i=1 到树的最后一个链接 i = n i=n i=n:
for i in range(1, n + 1):p = lambda_[i] # p for "parent"X_p_to_i[i], S[i], I[i] = compute_joint(joint_type[i], q[i])v[i] = X_p_to_i[i] * v[p] + S[i] * qd[i]a[i] = X_p_to_i[i] * a[p] + S[i] * qdd[i] + spatial_cross(v[i], S[i] * qd[i])f[i] = I[i] * a[i] + spatial_cross_dual(v[i], I[i] * v[i]) - f_ext[i]
向后传递以相反的顺序遍历相同的范围:
for i in range(n, 0, -1):p = lambda_[i]tau[i] = S[i].T * f[i]f[p] += X_p_to_i[i].T * f[i]
最终,我们得到:
def rnea(q, qd, qdd, f_ext):n = len(qd)v = [np.empty((6,)) for i in range(n + 1)]a = [np.empty((6,)) for i in range(n + 1)]f = [np.empty((6,)) for i in range(n + 1)]tau = [np.empty(qd[i].shape) for i in range(n + 1)]v[0] = np.zeros((6,))a[0] = -np.array([0.0, 0.0, -9.81])for i in range(1, n + 1):p = lambda_[i]X_p_to_i[i], S[i], I[i] = compute_joint(joint_type[i], q[i])v[i] = X_p_to_i[i] * v[p] + S[i] * qd[i]a[i] = X_p_to_i[i] * a[p] + S[i] * qdd[i] + spatial_cross(v[i], S[i] * qd[i])f[i] = I[i] * a[i] + spatial_cross_dual(v[i], I[i] * v[i]) - f_ext[i]for i in range(n, 0, -1):p = lambda_[i]tau[i] = S[i].T * f[i]f[p] += X_p_to_i[i].T * f[i]return tau
长度不同的数组列表通常是刚体动力学库或模拟器中的内部结构。从此类列表到平面数组结构的映射称为关节,并决定如何表示球形和自由飞行关节的方向。
👉参阅:亚图跨际
相关文章:

Python | C# | MATLAB 库卡机器人微分运动学 | 欧拉-拉格朗日动力学 | 混合动力控制
🎯要点 🎯正向运动学几何矩阵,Python虚拟机器人模拟动画二连杆平面机械臂 | 🎯 逆向运动学几何矩阵,Python虚拟机器人模拟动画三连杆平面机械臂 | 🎯微分运动学数学形态,Python模拟近似结果 | …...
Signac|成年小鼠大脑 单细胞ATAC分析(1)
引言 在本教程中,我们将探讨由10x Genomics公司提供的成年小鼠大脑细胞的单细胞ATAC-seq数据集。本教程中使用的所有相关文件均可在10x Genomics官方网站上获取。 本教程复现了之前在人类外周血单核细胞(PBMC)的Signac入门教程中执行的命令。…...

【POSIX】运行时so库动态加载
运行时可以自己自定义so库的动态加载框架,主动去加载某些库,并调用其中的某些方法 首先写一些方法,并生成so库 // hello.cpp#include <iostream>/*使用 nm 命令查看 so 库的内容 */// 1. 使用extern // dlsym(handle, "hello&qu…...

爱普生SG2520CAA汽车电子中控专用晶振
随着汽车电子技术的飞速发展,汽车中控系统变得越来越智能化和复杂化。为了确保这些系统的高性能和高可靠性,选择符合AEC-Q200标准的高品质晶振至关重要。爱普生SG2520CAA晶振凭借其优异的特性,成为汽车电子中控系统的理想选择。 爱普生晶振SG…...
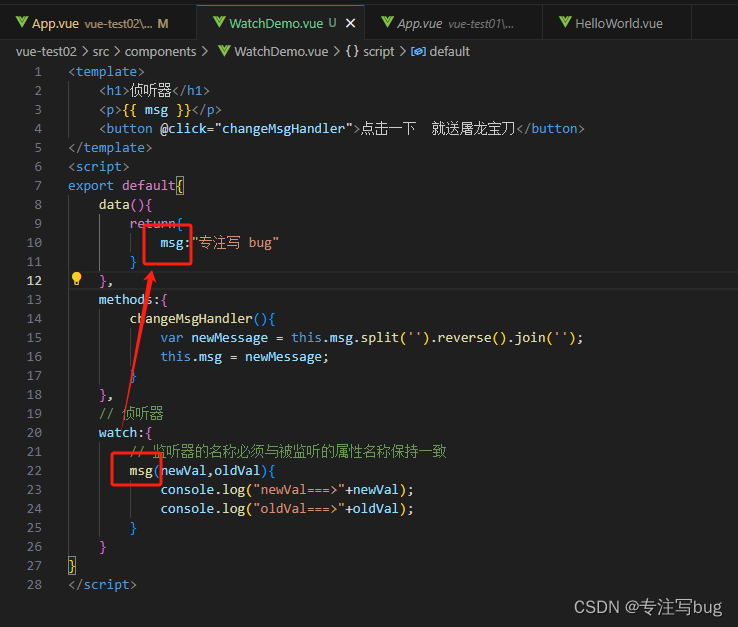
Vue——监听器简单使用与注意事项
文章目录 前言编写简单demo注意事项 前言 监听器,在官网中称为侦听器,个人还是喜欢称之为监听器。官方文档如下: vue 官网 侦听器 编写简单demo 侦听器在项目中通常用于监听某个属性变量值的变化,并根据该变化做出一些处理操作。…...
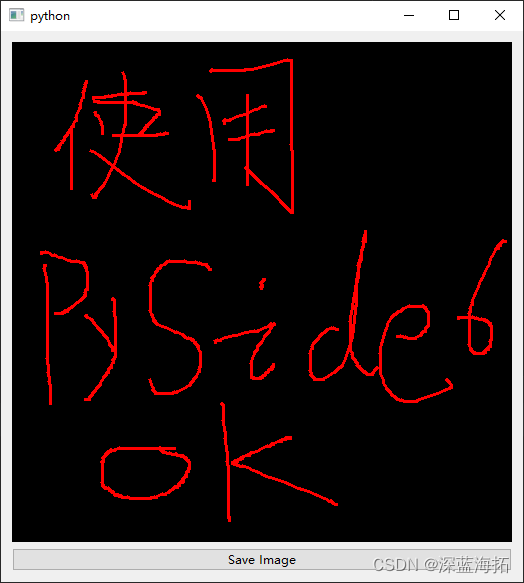
OpenCV的“画笔”功能
类似于画图软件的自由笔刷功能,当按住鼠标左键,在屏幕上画出连续的线条。 定义函数: import cv2 import numpy as np# 初始化参数 drawing False # 鼠标左键按下时为True ix, iy -1, -1 # 鼠标初始位置# 鼠标回调函数 def mouse_paint(…...
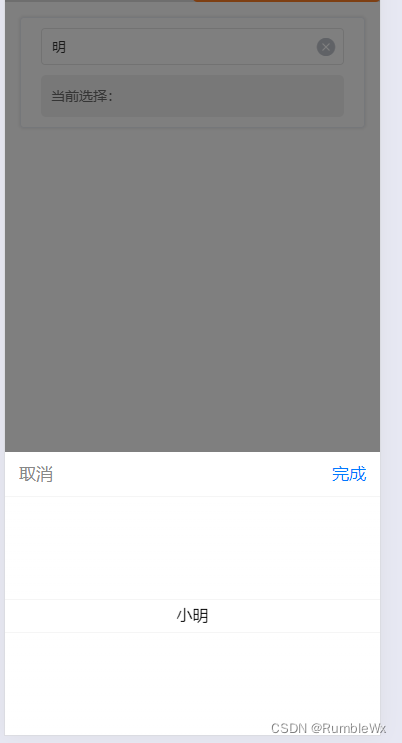
uniapp封装picker选择器组件,支持关键字查询
CommonPicker.vue组件 路径在 components\CommonPicker.vue <template><view><uni-easyinput v-model"searchQuery" :placeholder"placeholder" /><picker :range"filteredOptions" :range-key"text" v-model&…...
智慧城市的规划与实施:科技引领城市运行效率新飞跃
随着信息技术的飞速发展,智慧城市的构想正逐步成为现实。作为地理信息与遥感领域的研究者,我深知在这一转型过程中,技术的创新与应用是提升城市运行效率的关键。本文旨在探讨如何利用地理信息系统(GIS)、遥感技术、大数…...
Linux——内存管理代码分析
虚空间管理 页框和页的关系 页框 将内存空间分为一个个大小相等的分区(比如:每个分区4KB),每个分区就是一个页框,也叫页帧,即物理页面,是linux划分内存空间的结果。 每个页框都有一个页框号,即内存块号、物理块号。 页 将用户…...
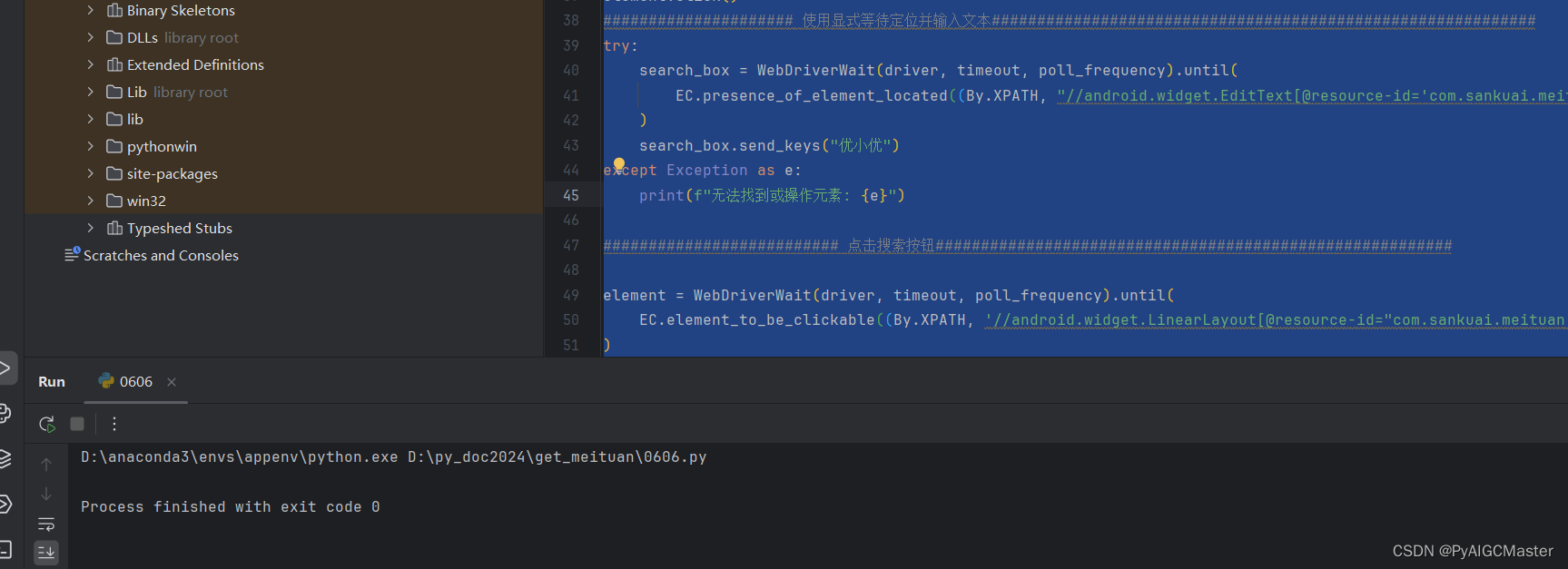
手机自动化测试:4.通过appium inspector 获取相关app的信息,以某团为例,点击,搜索,获取数据等。
0.使用inspector时,一定要把不相关的如weditor啥的退出去,否则,净是事。 1.从0开始的数据获取 第一个位置,有时0.0.0.0,不可以的话,你就用这个。 第二个位置,抄上。 直接点击第三个启动。不要…...
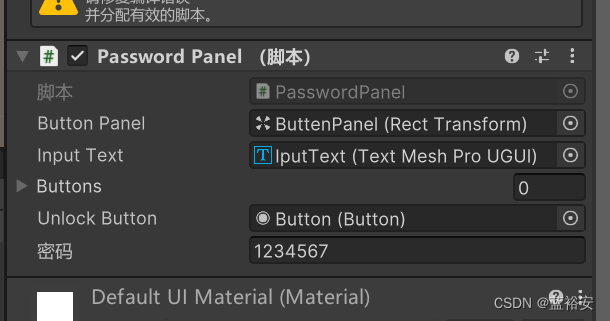
个人项目———密码锁的实现
布局组件 布局效果 组件绑定 密码锁的实现代码 using TMPro; using UnityEngine; using UnityEngine.UI;public class PasswordPanel : MonoBehaviour {// public Button button;// 所有按键的父物体public Transform buttonPanel;// 输入字符串的文本框public TMP_Text input…...

关于Input【type=number】可以输入e问题及解决方案
一、为什么 因为在数学里e 代表无理数,e是自然对数的底数,同时它又是一个无限不循环小数,所以我们在输入 e 时,输入框会默认 e 是数字,从而没有对它进行限制。 二、解决方案 小提示:vue下监听事件需要加n…...
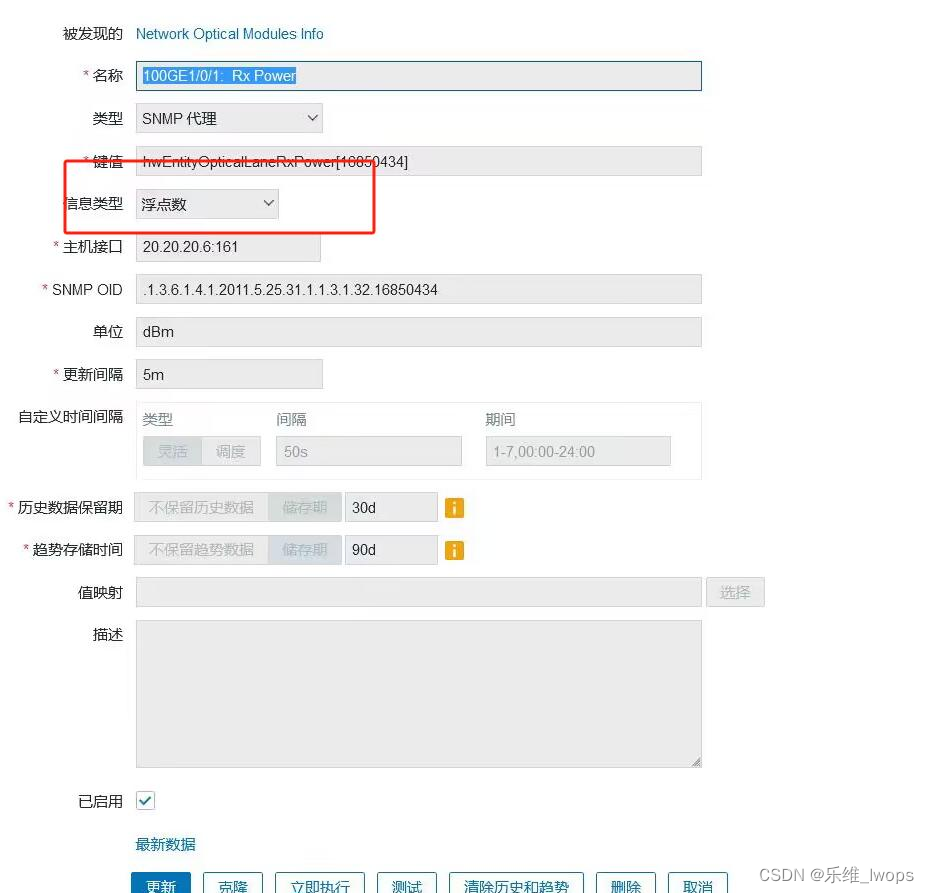
zabbix“专家坐诊”第241期问答
问题一 Q:华为交换机的100GE 1/0/1口的光模块收光值监测不到,有没有人碰到过这个问题呢?其他的端口都能监测到收光值,但是100GE 1/0/1口监测不到收光值。底层能查到,zabbix 6.0监控不到,以下是端口的报错信…...
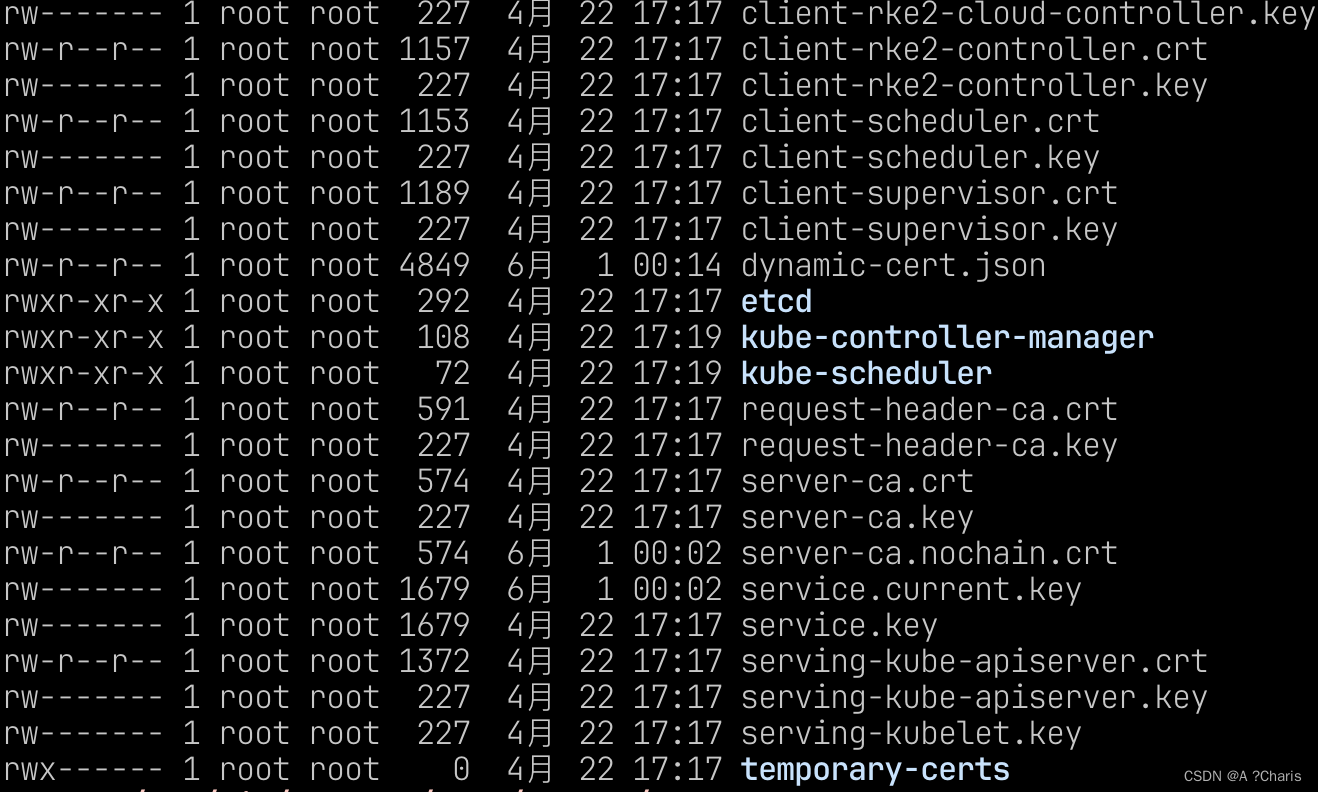
了解Kubernetes-RKE2的PKI以及证书存放位置
一、什么是PKI? 简称:证书基础设施。 可以方便理解为当你的集群有Server,Client架构,那么为了安全加密之间的通信,则需要使用证书进行交互,那么利用PKI架构可以安全加密组件之间的通信。 二、Kubernetes的PKI架构什…...

利用大语言模型进行事实匹配
论文地址:Automated Claim Matching with Large Language Models: Empowering Fact-Checkers in the Fight Against Misinformation | Companion Proceedings of the ACM on Web Conference 2024 WWW 2024 Automated Claim Matching with Large Language Models: Empowering F…...
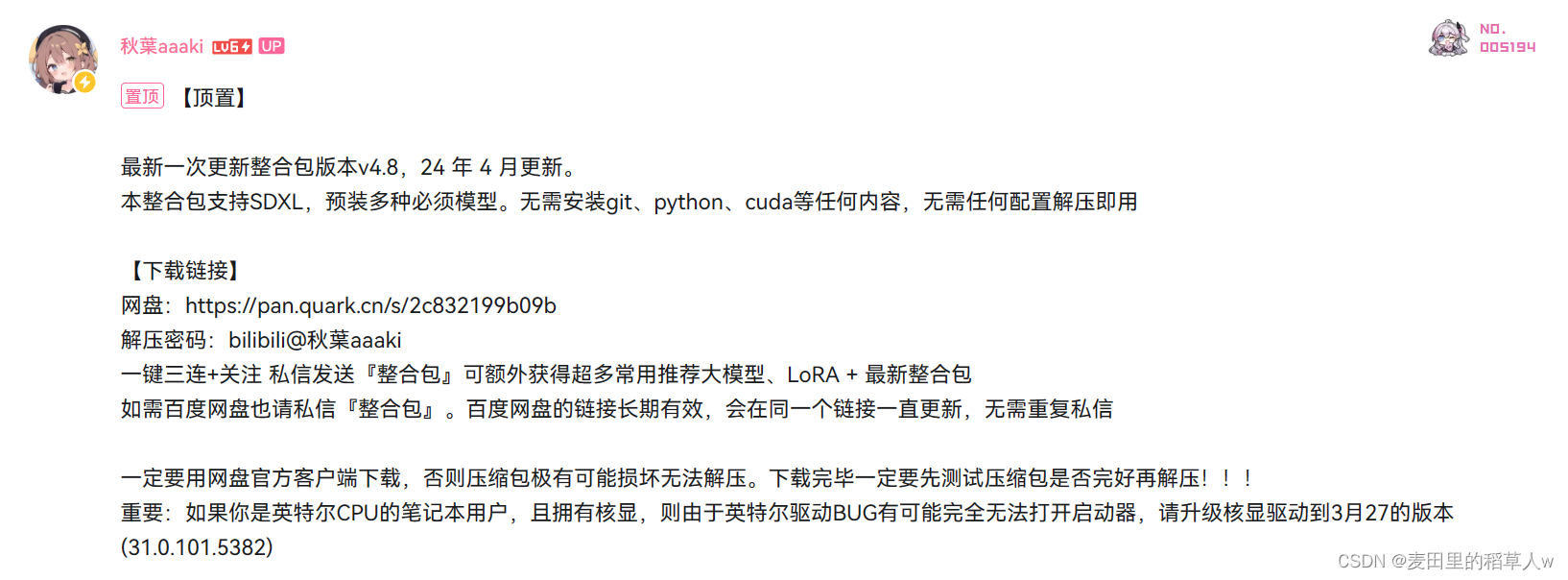
【Stable Diffusion】(基础篇一)—— Stable Diffusion的安装
本系列笔记主要参考B站nenly同学的视频教程,传送门:B站第一套系统的AI绘画课!零基础学会Stable Diffusion,这绝对是你看过的最容易上手的AI绘画教程 | SD WebUI 保姆级攻略_哔哩哔哩_bilibili **Stable Diffusion(简称…...

维纳运动的概念
维纳运动(Wiener Process),也称为标准布朗运动,是一种重要的随机过程,广泛应用于数学、物理学和金融学等领域。它是一个连续时间的随机过程,具有一些特殊的性质,使其成为描述随机动态系统的经典…...
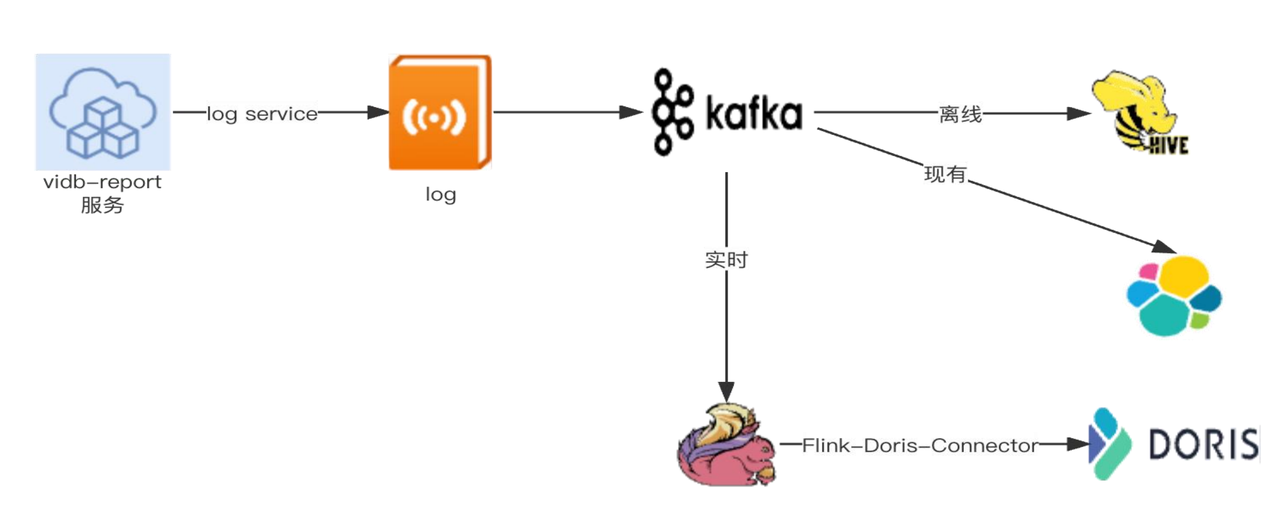
毫秒级查询性能优化实践!Apache Doris 在极越汽车数字化运营和营销方向的解决方案
作者:韩同阳,极越汽车大数据架构师,Apache Doris Active Contributor 编辑整理:SelectDB 技术团队 导读:极越是高端智能汽车机器人品牌,基于领先的百度 AI 能力和吉利 SEA 浩瀚架构生态赋能,致…...

vllm 大模型量化微调推理使用: lora、gptq、awq
1)微调lora模型推理 docker run --gpus all -v /ai/Qwen1.5-7B-Chat:/qwen-7b -v /ai/lora:/lora -p 10860:10860 --...
 自动测评方法)
WPS/Office(Word、Excel、PPT) 自动测评方法
在各高等、中等院校的计算机类课程中,计算机基本应用技能的上机操作考试,广受重视,大为盛行。其中,office(word、excel、ppt)上机考试最为普遍。于是,实现这类Office文档操作的自动阅卷评分,很有必要。本人最近项目上刚好遇到需要解决这种自动评分的问题,所以再次记录下解决的…...

Qwen3.5-9B实战落地:政务公文校对+政策条款关联性分析案例
Qwen3.5-9B实战落地:政务公文校对政策条款关联性分析案例 1. 项目背景与模型介绍 Qwen3.5-9B是一款拥有90亿参数的开源大语言模型,在政务场景中展现出强大的应用潜力。这个模型特别适合处理结构化文本分析任务,能够理解复杂的政策语言和公文…...

提升GitHub访问效率的实用方案
提升GitHub访问效率的实用方案 【免费下载链接】gh-proxy github release、archive以及项目文件的加速项目 项目地址: https://gitcode.com/gh_mirrors/gh/gh-proxy 诊断连接瓶颈 检测网络延迟指标 准备工作:确保系统已安装网络诊断工具(Linux默…...

OpenClaw技能扩展:千问3.5-35B-A3B-FP8驱动的内容生成与发布
OpenClaw技能扩展:千问3.5-35B-A3B-FP8驱动的内容生成与发布 1. 为什么选择OpenClaw千问3.5做内容自动化 去年冬天,当我第一次尝试用AI自动化完成公众号内容生产时,经历了典型的"缝合怪"工作流:ChatGPT生成初稿→Midj…...

seo 站群的优缺点是什么
SEO 站群的优缺点解析 在现代的互联网营销中,SEO(搜索引擎优化)站群是一个重要的概念。SEO 站群是指由多个主题相关的网站组成的集合,这些网站通过某种联系形式运作在一起,以提升整体的搜索引擎排名和流量。虽然 SEO …...

【WEB模型】CS架构BS架构HTMLCSSJS
一、CS架构 - Client/Server 客户端/服务器pc安装软件:安卓应用、ios应用需要安装专门软件才能用,软件直接跟服务器通信开发成本高,各个平台都有对应的开发工程师好处:功能强大二、BS架构 - Browser/Server 浏览器/服务器不需要安…...

老马失前蹄,竟然在数据库外键上翻车了,重温外键级联
一、什么是setuptools? setuptools 是一个用于创建、分发和安装 Python 包的核心库。 它可以帮助你: 定义 Python 包的元数据(如名称、版本、作者等)。 声明包的依赖项,确保你的包能够正确运行。 构建源代码分发包&…...

Kubernetes中的ConfigMap与Secret:安全高效管理配置的终极指南
引言:云原生时代的配置困境 在传统的运维模式中,配置往往硬编码在镜像中,或通过环境变量散落在各处。随着微服务架构的普及,这种模式带来了“配置漂移”、镜像臃肿、敏感信息泄露等痛点。 Kubernetes 通过 ConfigMap 和 Secret …...

嵌入式开发中数据结构的优化与应用实践
1. 数据结构在嵌入式开发中的核心价值作为一名在嵌入式领域摸爬滚打十年的老兵,我深刻体会到数据结构就像瑞士军刀里的各种工具——选对工具能让工作事半功倍。在资源受限的MCU环境中,一个精心选择的数据结构可能意味着程序能否流畅运行和内存是否会爆掉…...

OpenClaw多模态研究:Qwen2.5-VL-7B在学术资料分析中的应用
OpenClaw多模态研究:Qwen2.5-VL-7B在学术资料分析中的应用 1. 为什么选择OpenClawQwen2.5-VL进行学术研究 去年冬天整理博士论文参考文献时,我对着堆积如山的PDF文件突然意识到:传统文献管理工具只能解决"存储"问题,却…...

S2-Pro模型部署在CentOS7生产环境:系统调优与安全加固
S2-Pro模型部署在CentOS7生产环境:系统调优与安全加固 1. 引言 在AI模型生产环境部署中,系统调优和安全加固往往是被忽视却至关重要的环节。很多团队花费大量精力优化模型性能,却因为基础环境配置不当导致服务不稳定或安全漏洞。本文将手把…...