【成品设计】基于STM32的单相瞬时值反馈逆变器
《基于STM32的单相瞬时值反馈逆变器》
整体功能:

图13 软件框图
如图13所示,由于本设计中需要通过定时器中断执行一些程序,故首先对中断进行初始化。中断初始化以后即为对串口进行初始化,总共初始化了两个串口,第一个串口波特率为9600,主要目的是为了传输数据至串口调试助手用来测试。第二个串口波特率为4800,主要目的是接收电能测量得出的数据,解析电能测量模块传过来的串口数据,采集到交流电压和交流电流信号。串口初始化完成以后紧接着对定时器进行初始化,在本设计中用到了两个定时器。第一个定时器为定时器三,其作用是开启PID追踪,定时器三的中断频率为20KHz,即为50us。设置中断频率为20KHz的原因在于需要以这种频率去改变驱动PWM的占空比,本设计拟采用PWM模拟SPWM的模式,故需要在一个工频周期内产生更多的正弦点,在软件内部使得PWM的占空比以正弦波的形式去变化,一个周期为50Hz即20ms。根据这个关系可算得在一个工频周期内需要模拟出400个正弦波点,其中前200个点代表是正弦波的正半周期,后200个点代表正弦波的负半周期。在定时器三的中断中,定义了一个暂态变量,当暂态变量等于400的时候,也就是一个工频周期过去以后执行一次PID的执行函数,通过PID去追踪一次目标电压。故在1s内可对整个系统进行50次的追踪。定时器一的工作频率也为20KHz,方便进行驱动,在定时器一的初始化函数中对死区进行了设置,并且复用IO口作为互补驱动输出口。
定时器初始化完毕以后对LED,按键进行了初始化。紧接着初始化了PID的参数,PID的参数初始化根据系统的不行进行确认,由于我们用到了PI环,所以对P环的参数和I环的参数都进行了初始化。用到的PID为增量式PID,每次输出的值是在原基础上进行加减,而并不是直接赋值,这样的好处在于有一个追踪爬坡的过程。当初始化完毕以后就对屏幕进行初始化和清屏,同时关闭继电器电源输入,关闭PID,关闭PWM的输出。随后进入初始化界面,当检测到Set按键按下以后,打开继电器,电源能正常输入到单相逆变电路中。同时也使能了PID和打开PWM的输出。由于定时器三早已初始化,PWM模拟SPWM的函数早已开始运行,故此刻逆变电路已经开始工作,不过输出占空比需要乘以一个调制系数才是真正的输出,在设计中设定调制系数越高输出的交流电压幅值就越高,调制系数越低交流电压幅值就越低。软启动的含义在于渐渐增加调制系数,调制系数设定最高为1200,对应正常幅值输出的1.2倍,最低输出100,对应幅值的0.1倍。一般来说驱动MOS管的占空比不能跑满,会带来很大的负荷量。
当软启动以后,电路已经开始正常工作。此时可以通过按键选择工作模式和设定的追踪电压或者追踪功率。当工作模式设定完成以及追踪目标设定完毕后,电路开启PID追踪模式,直到获得追踪的目标电压值。
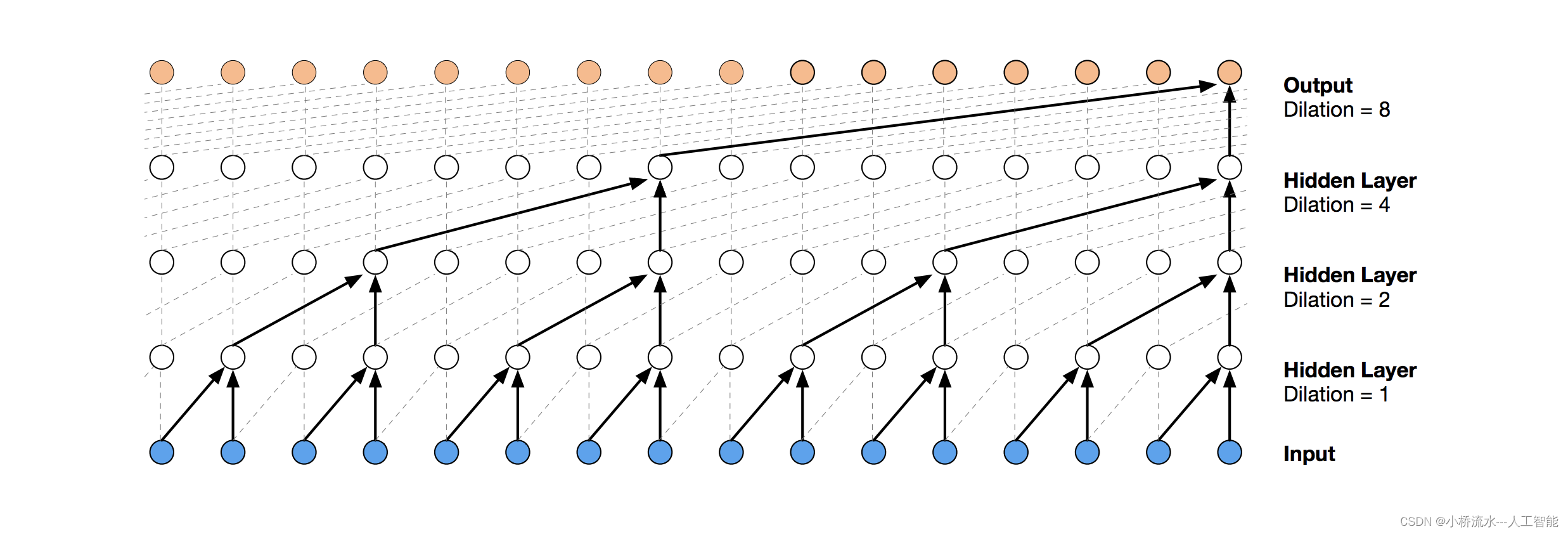
(1)PWM模拟SPWM算法实现
此算法要与实际电路建立联系,单相逆变电路存在两个对管,电路中电阻两端已经确认了电压的方向,若想要让电阻两端电压从宏观的角度测出来为0V,故需要在这一段时间的负电压和正点压占比相同,比如一半的时间正电压为10V,一半的时间负电压为-10V,这样相互抵消最终测出的电压就为0V。根据这个原理,当占空比为50%的时候,左右对管导通的时间相同,正电压和负电压幅值相同,极性相反,同样时间也相同,故电阻呈现0V。若加大占空比,则正电压占比时间增多,整体就呈现正电压。若减小占空比,则负电压占比时间增多,整体呈现负电压。因此通过控制占空比大于50%或者小于50%就可实现电压正负,并且高出50%越多,正电压越大。按照这个原理,只需要把50%的占空比是为0电位,让占空比按照正弦表的规律去变化,如从50%变化到75%再到50%到25%最终再回到50%,就实现了一个正弦的生成。这个阶段变换的点数越多,交流电压的图像就越平滑,线性度就越好。改变交流电压幅值的方法通过改变大于50%的最大占空比即可实现,需要注意的是,大于50%的最高占空比差值与最小占空差值需一致,这样才能实现上下幅值相等,且以0电位为分割线的作用。

图14 PWM模拟SPWM算法流程
PWM模拟SPWM算法如图14所示。首先确定最高占空比对应的幅值,此处设定100%占空比对应幅值为3600,故50%占空比设置为1800。由于占空比不能弄满,所以我们设定偏离50%占空比25%,即2700。将此数据导入到SPWM表,设定好生成的点数,即可生成一个正弦数组表。在软件内部定义一个400内存的数组,将数组表赋值进去,每隔50us执行一次数组表的功能。以下是设定的PWM控制函数,TIM1是高级定时器一,由于用到的是定时器一的通道一,所以通过此函数驱动。SinData是设定的正弦数表,spwm_count变量每50us增加1,length是设定的数组长度。因此通过这个取余可以每经过一次循环对数组内部的值进行加1移位。减去1800的意思是先把50%占空比弄到0电位,再乘以调制系数,由于调制系数是以1000为单位,故还需除以1000。调整好了以后再加上1800即回到50%占空比。
set_pwm(TIM1,1,(u16)((sinData[spwm_count%length]-1800)*duty/1000+1800),3500);
(2)PID功能实现
在本设计之中,PID的作用是追踪特定的输出电压或特定功率。由于输入直流电压恒定,故实现输出交流电压可调需要通过PID实现。PID环节会采集检测到的交流电压信号,交流电压信号送入反馈函数中与目标值做比较。若小于目标电压,则根据小于的比例以及变换的方向进行调节,输出增量,增量的应用对象为调制系数。调制系数越大,输出电压幅值越大,调制系数越小,输出电压幅值越小。
在PID的函数中,需要输入五个变量。格式为PID_X(float now,float target,float kp,float add_limit,float out_limit),其中now为检测到的交流电压,target为设定的目标电压,kp为比例环的调节系数,add_limit代表每一次执行增加的限制,在交流电压和目标电压相差过大时,比例环节会有比较大的差值,故输出的增量也大,需限制增量,否则会让电路迅速波动,容易造成输出紊乱。Out_limit参量含义在于限制住最大输出,前文提到了MOS管如果100%占空比容易损伤器件,故对此进行一个限制,使得最终不能超过特定的占空比,实现安全保护。
以下是PID里面的主要调节参数环节,reaval是当前值,Ek为当前误差,Pout是比例环,比例环的定义为当前的误差乘以比例系数,其中kp可调,增大kp比例差分出来的结果就较大一些,减小则影响小一些。公式完全按照PID的控制方式进行书写,其中I环的公式是根据当前误差与上一次误差的差值进行判断,起到刹车的效果。OUT_Single是三次环节累加的结果,这个参数将加到当前的输出结果上或者减去。对输出也进行了限位,防止最终输出出现过度的情况产生。
pid.reaval=now;//当前值
pid.Ek=target-pid.reaval;//当前误差,指定值减去当前值
pid.Pout=kppid.Ekpid.T/pid.Ti; //P公式
pid.Iout=pid.Kp_I*(pid.Ek-pid.Ek_1);//I公式
pid.Dout=pid.Kp_Dpid.Td(pid.Ek-pid.Ek_1-pid.Ek_1+pid.Ek_2)/pid.T;//D公式
pid.OUT_Single=pid.Pout+pid.Iout+pid.Dout;
if(pid.OUT_Single>add_limit)pid.OUT_Single=add_limit;//限位
else if(pid.OUT_Single<-add_limit)pid.OUT_Single=-add_limit;
OUT+=pid.OUT_Single;
if(OUT>out_limit)OUT=out_limit;//输出限位,限位的范围是300-sum_limit(自行设定)
else if(OUT<100)OUT=100;
pid.Ek_2=pid.Ek_1;//将上次误差赋值给上上次误差
pid.Ek_1=pid.Ek;//将当前误差赋值给上次误差
在TIM3的定时器中,根据当前的mode_status状态进行判断,当mode_status的状态为1的时候,执行电压追踪的作用。当mode_status=2时,实现功率追踪的作用。
if(mode_status1)duty=PID_X(ACVotage*10,AC_Target,kp_v,1,1200);
if(mode_status2)duty=PID_X(ACVotage*7.228,gonglv_Target,kp_p,1,1200);
(3)交流电压电流信号检测
由于与电能测量模块的串口通信协议已经包装好,因此在串口中断函数处已经将数据处理完毕,在主函数while循环内进行数据处理。ACVotage为交流电压的有效值,由于采集会存在着一定的误差,所以要乘以一个校正系数。校正系数的调整方法为先测出交流电压的大小,然后求出显示的交流电压误差,近似相等即可。交流电流的调整方法类似,也是通过系数进行改变。另外也设定了继电器断开的条件,如交流电压超过31V,交流电流超过3A,当累计超过了150ms以后判定为危险状态,从而断开继电器。
ACVotage=(Voltage_Parameter_Reg*1.88/Voltage_Reg)jiaozheng;//电压有效值
if(ACVotage<=2)ACVotage=0;
ACCurrent=(Current_Parameter_Reg1.0/Current_Reg)*0.4893;//电流有效值
if(ACVotage>31.00f||ACCurrent>3.00f)baojing+=1,delay_ms(50);
else baojing=0;
if(baojing==3)GPIO_ResetBits(GPIOA,GPIO_Pin_0),baojing=0;
作品展示:



资料详情:

说明:
成品设计不易,详情关注闲鱼店铺:数字梦想家,查看评论区。

相关文章:
【成品设计】基于STM32的单相瞬时值反馈逆变器
《基于STM32的单相瞬时值反馈逆变器》 整体功能: 图13 软件框图 如图13所示,由于本设计中需要通过定时器中断执行一些程序,故首先对中断进行初始化。中断初始化以后即为对串口进行初始化,总共初始化了两个串口,第一个…...

浏览器实时播放摄像头数据并通过 Yolo 进行图像识别
安装 Ultralytics 之后,可以直接通过本地获取摄像头数据流,并通过 Yolo 模型实时进行识别。大多情况下,安装本地程序成本比较高,需要编译打包等等操作,如果可以直接通过浏览器显示视频,并实时显示识别到的对…...

redis清空list
redis list清空 要清空Redis中的list,您可以使用LTRIM命令。Redis Ltrim 对一个列表进行修剪(trim),就是说,让列表只保留指定区间内的元素,不在指定区间之内的元素都将被删除。 下标 0 表示列表的第一个元素,以 1 表示…...
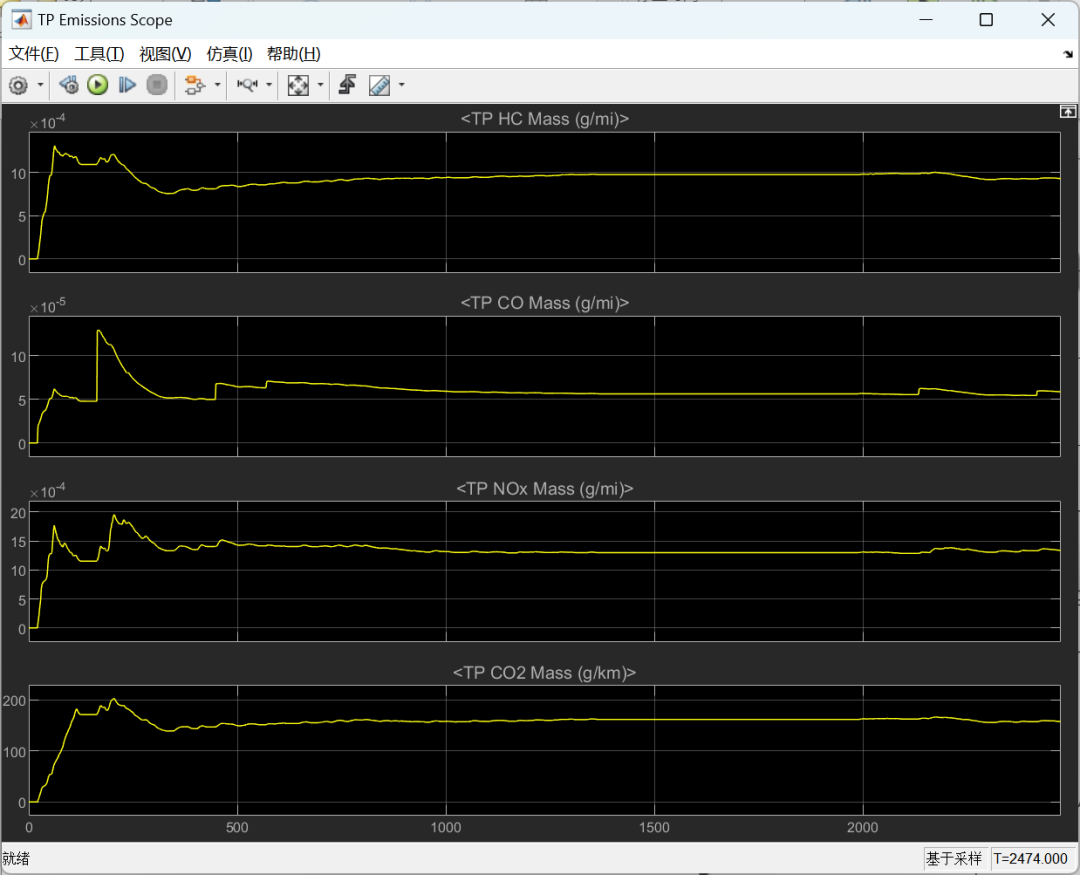
汽车油耗NEDC与WLTP有什么区别?以及MATLAB/Simulink的汽车行驶工况仿真
最近的热点新闻非比亚迪的秦L莫属,其油耗达到2.9L/100km,但其标注为NEDC也引起了讨论, NEDC与WLTP的区别 NEDC的全称为“New European Driving Cycle”,即“新欧洲驾驶循环”。这种油耗测试标准起源于上世纪80年代,主…...
【Python】已解决报错:AttributeError: module ‘json‘ has no attribute ‘loads‘解决办法
😎 作者介绍:我是程序员洲洲,一个热爱写作的非著名程序员。CSDN全栈优质领域创作者、华为云博客社区云享专家、阿里云博客社区专家博主。 🤓 同时欢迎大家关注其他专栏,我将分享Web前后端开发、人工智能、机器学习、深…...
按钮输入)
(5)按钮输入
文章目录 前言 1 基础设置 2 数字逻辑/模拟电压设置 3 PWM输入设置 4 额外设置 前言 连接到自动驾驶仪的最多四个外部按钮或开关可以被配置为触发辅助功能(Auxiliary Functions),类似于 RC 通道开关的触发方式。这些按钮输入可以被配置为使用数字逻辑电平电压…...
嵌入式开发、C++后台开发、C++音视频开发怎么选择?
开始前刚好我有一些资料,是我根据网友给的问题精心整理了一份「嵌入式的资料从专业入门到高级教程」, 点个关注在评论区回复“888”之后私信回复“888”,全部无偿共享给大家!!! 嵌入式开发:非常…...
高考志愿填报,大学读什么专业比较好?
高考分数出炉后,选择什么样的专业,如何去选择专业?于毕业生而言是一个难题。因为,就读的专业前景不好,意味着就业情况不乐观,意味着毕业就是失业。 盲目选择专业的确会让自己就业时受挫,也因此…...
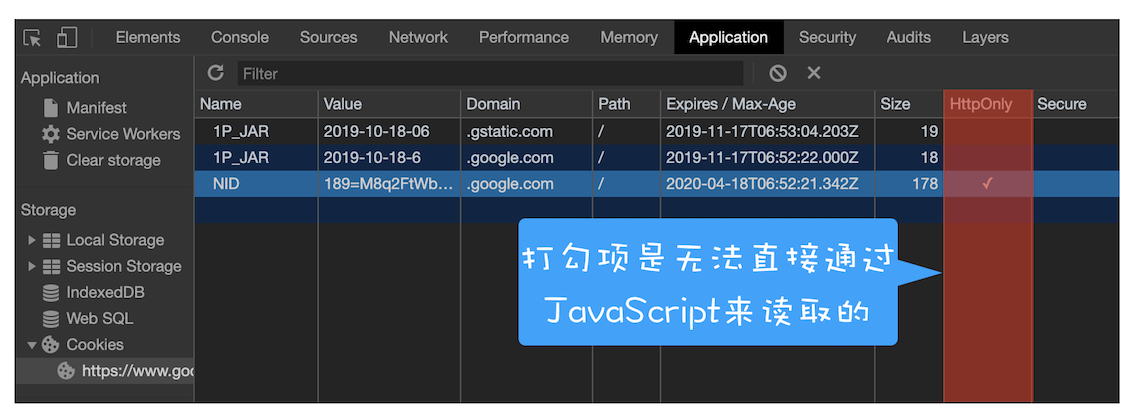
33 _ 跨站脚本攻击(XSS):为什么Cookie中有HttpOnly属性?
通过上篇文章的介绍,我们知道了同源策略可以隔离各个站点之间的DOM交互、页面数据和网络通信,虽然严格的同源策略会带来更多的安全,但是也束缚了Web。这就需要在安全和自由之间找到一个平衡点,所以我们默认页面中可以引用任意第三…...

C++入门小结
C命名空间总结 C 中的命名空间(Namespace)是一种组织代码的方式,用于避免全局命名冲突。在同一个命名空间中,可以有相同名称的变量、函数和类,但它们彼此互不影响。下面是对 C 命名空间的一些总结: 定义命…...

Java 开发实例:Spring Boot+AOP+注解+Redis防重复提交(防抖)
文章目录 1. 环境准备2. 引入依赖3. 配置Redis4. 创建防重复提交注解5. 实现AOP切面6. 创建示例Controller7. 测试8. 进一步优化8.1 自定义异常处理8.2 提升Redis的健壮性 9. 总结 🎉欢迎来到Java学习路线专栏~探索Java中的静态变量与实例变量 ☆* o(≧▽≦)o *☆嗨…...

使用difflib实现文件差异比较用html显示
1.默认方式,其中加入文本过长,需要换行,因此做 contenthtml_output.replace(</style>,table.diff td {word-wrap: break-word;white-space: pre-wrap;max-width: 100%;}</style>),添加换行操作 ps:当前te…...

【文末附gpt升级秘笈】AI热潮降温与AGI场景普及的局限性
AI热潮降温与AGI场景普及的局限性 摘要: 随着人工智能(AI)技术的迅猛发展,AI热一度席卷全球,引发了广泛的关注和讨论。然而,近期一些学者和行业专家对AI的发展前景提出了质疑,认为AI热潮将逐渐…...

Vue待学习
整个渲染过程了解 Vue实例?Vue模板?渲染函数render()?虚拟DOM VNode?模板编译器?diff算法 CSS相关 CSS高级学习?过渡? 待熟悉掌握 Vue-router?VueX?Vue-Cli、Webpack和…...

TOP150-LC88
/*给你两个按 非递减顺序 排列的整数数组 nums1 和 nums2,另有两个整数 m 和 n ,分别表示 nums1 和 nums2 中的元素数目。请你 合并 nums2 到 nums1 中,使合并后的数组同样按 非递减顺序 排列。注意:最终,合并后数组不…...
使用Python和TCN进行时间序列预测:一个完整的实战示例
使用Python和TCN进行时间序列预测:一个完整的实战示例 时间卷积网络(TCN)已被证明在处理序列数据方面表现出色,尤其是在需要捕获长期依赖关系的任务中。在本文中,我们将通过一个简单的例子,展示如何使用Py…...
如何用R语言ggplot2画高水平期刊散点图
文章目录 前言一、数据集二、ggplot2画图1、全部代码2、细节拆分1)导包2)创建图形对象3)主题设置4)轴设置5)图例设置6)散点颜色7)保存图片 前言 一、数据集 数据下载链接见文章顶部 处理前的数据…...

Python基于 Jupyter Notebook 的图形可视化工具库之ipysigma使用详解
概要 在数据科学和网络分析中,图(Graph)结构是一种常用的数据结构,用于表示实体及其关系。为了方便图数据的可视化和交互操作,ipysigma 提供了一个基于 Jupyter Notebook 的图形可视化工具。通过 ipysigma,用户可以在 Jupyter Notebook 中创建、编辑和展示图结构,方便进…...

四叉树和KD树
1. 简介 四叉树和KD树都是用于空间数据索引和检索的树状数据结构。它们通过将空间递归地划分为更小的区域,并存储每个区域内的点,来实现快速搜索和范围查询。 2. 四叉树 2.1 定义 四叉树是一种树状数据结构,它将二维空间递归地划分为四个…...

C语言中结构体使用.与->访问成员变量的区别
文章目录 前言点运算符(.)箭头运算符(->)总结 前言 在C语言中,. 和 -> 都是用来访问结构体成员的运算符,但它们的使用场景和含义有所不同。 提示:以下是本篇文章正文内容,下面…...

OpenClaw学术助手:Qwen2.5-VL-7B自动解析论文图表数据
OpenClaw学术助手:Qwen2.5-VL-7B自动解析论文图表数据 1. 为什么需要自动化论文图表解析 作为一名经常需要阅读大量学术论文的研究者,我发现自己花费了太多时间在手动转录图表数据上。每当遇到一篇包含复杂实验数据的论文,就需要对着PDF截图…...

构建企业级抓取服务:基于快马平台的openclaw生产环境部署实战
今天想和大家分享一个实战经验:如何用InsCode(快马)平台快速搭建企业级的openclaw分布式抓取服务。这个方案特别适合需要处理大规模数据采集的业务场景,比如电商价格监控、舆情分析或者竞品追踪。 分布式架构设计 生产环境最怕单点故障,所以我…...

雷小兔:让学术论文排版变得简单高效
产品概述 雷小兔是一款专门为学生和研究人员设计的学术论文辅助工具。无论你是在准备毕业论文、学位论文还是学术发表,雷小兔都能为你提供全面的支持和帮助。 论文排版方面的核心优势 1. 模板齐全,开箱即用 雷小兔内置了数十种符合国内外高校标准的论…...

2026届学术党必备的十大AI写作助手推荐榜单
Ai论文网站排名(开题报告、文献综述、降aigc率、降重综合对比) TOP1. 千笔AI TOP2. aipasspaper TOP3. 清北论文 TOP4. 豆包 TOP5. kimi TOP6. deepseek 知网AIGC检测服务的目的是辅助识别学术文本里由人工智能生成的内容,该技术凭借对…...

湖南石材结晶公司
在长沙,无论是高端商场、星级酒店,还是政务大厅、三甲医院,光洁如镜、平整如砥的石材地面,都是其专业形象与高端质感的直接体现。然而,石材作为“面子工程”,长期承受高频人流、设备碾压,极易出…...

OpCore-Simplify:一键自动化黑苹果配置,让复杂技术变得简单
OpCore-Simplify:一键自动化黑苹果配置,让复杂技术变得简单 【免费下载链接】OpCore-Simplify A tool designed to simplify the creation of OpenCore EFI 项目地址: https://gitcode.com/GitHub_Trending/op/OpCore-Simplify OpCore-Simplify是…...

拆解Meta Ray-Ban同款主控:高通AR1芯片如何让AI眼镜‘听懂’你的手势和眼神?
高通AR1芯片如何赋能Meta Ray-Ban:从异构计算到交互革命 当你的眼镜能读懂眼神、响应手势,甚至预判你的需求时,科技与日常的边界便被重新定义。Meta Ray-Ban智能眼镜之所以成为现象级产品,核心秘密藏在仅指甲盖大小的高通AR1芯片中…...
)
Windows平台用CMake+VS2019编译NLopt的完整流程(附环境变量配置)
Windows平台用CMakeVS2019编译NLopt的完整流程(附环境变量配置) 在科学计算和优化算法开发领域,NLopt作为一个功能强大的开源库,提供了多种非线性优化算法的实现。对于Windows平台的C开发者而言,掌握从源码构建NLopt的…...

VictoriaMetrics 集群版实战指南:架构解析与最佳实践
1. VictoriaMetrics集群版架构深度解析 第一次接触VictoriaMetrics集群版时,我被它简洁的组件划分惊艳到了。与常见的时序数据库不同,它的三大核心组件vmstorage、vminsert、vmselect各司其职,这种设计让横向扩展变得异常灵活。在实际部署中&…...

小米智能家居无缝接入Home Assistant的3种高效方法
小米智能家居无缝接入Home Assistant的3种高效方法 【免费下载链接】ha_xiaomi_home Xiaomi Home Integration for Home Assistant 项目地址: https://gitcode.com/GitHub_Trending/ha/ha_xiaomi_home Xiaomi Home集成是小米官方为Home Assistant提供的智能家居集成组件…...