基于人脸68特征点识别的美颜算法(一) 大眼算法 C++
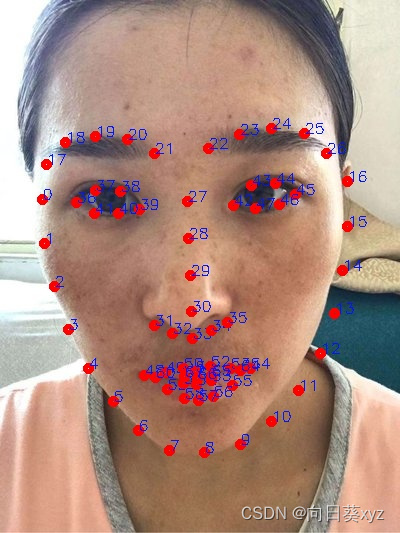
1、加载一张原图,并识别人脸的68个特征点
cv::Mat img = cv::imread("5.jpg");// 人脸68特征点的识别函数vector<Point2f> points_vec = dectectFace68(img);// 大眼效果函数Mat dst0 = on_BigEye(800, img, points_vec);

2、函数
vector<Point2f> dectectFace68(Mat src)
{vector<Point2f> points_vec;int* pResults = NULL;//在检测函数中使用了pBuffer。 //如果你调用多个线程中的函数,请为每个线程创建一个缓冲区! unsigned char* pBuffer = (unsigned char*)malloc(DETECT_BUFFER_SIZE);if (!pBuffer){fprintf(stderr, "Can not alloc buffer.\n");//return 100;}Mat gray;cvtColor(src, gray, CV_BGR2GRAY);int doLandmark = 1;// do landmark detection pResults = facedetect_multiview_reinforce(pBuffer, (unsigned char*)(gray.ptr(0)), gray.cols, gray.rows, (int)gray.step,1.2f, 2, 48, 0, doLandmark);int cxa = *pResults;ofstream file("facedata.txt", ios::out);//打印检测结果 if (0 == cxa){}else{for (int i = 0; i < (pResults ? *pResults : 0); i++){short* p = ((short*)(pResults + 1)) + 142 * i;//rectangle(src, Rect(p[0], p[1], p[2], p[3]), Scalar(0, 255, 0), 2);if (doLandmark){for (int j = 0; j < 68; j++){char c[8];_itoa(j, c, 10);Point2f ff(p[6 + 2 * j], p[6 + 2 * j + 1]);points_vec.push_back(ff);file << ff.x << "\t" << ff.y << endl;/* circle(src, Point((int)p[6 + 2 * j], (int)p[6 + 2 * j + 1]), 3, Scalar(0, 0, 255), 3);CvPoint font;putText(src, c, Point((int)p[6 + 2 * j], (int)p[6 + 2 * j + 1]), FONT_HERSHEY_SIMPLEX, 0.5, Scalar(255, 23, 0), 1);*/}}}}return points_vec;
}// 双线性插值算法
void BilinearInsert(Mat& src, Mat& dst, float ux, float uy, int i, int j)
{auto Abs = [&](float f) {return f > 0 ? f : -f;};int c = src.channels();if (c == 3){//存储图像得浮点坐标CvPoint2D32f uv;CvPoint3D32f f1;CvPoint3D32f f2;//取整数int iu = (int)ux;int iv = (int)uy;uv.x = iu + 1;uv.y = iv + 1;//step图象像素行的实际宽度 三个通道进行计算(0 , 1 2 三通道)f1.x = ((uchar*)(src.data + src.step * iv))[iu * 3] * (1 - Abs(uv.x - iu)) + \((uchar*)(src.data + src.step * iv))[(iu + 1) * 3] * (uv.x - iu);f1.y = ((uchar*)(src.data + src.step * iv))[iu * 3 + 1] * (1 - Abs(uv.x - iu)) + \((uchar*)(src.data + src.step * iv))[(iu + 1) * 3 + 1] * (uv.x - iu);f1.z = ((uchar*)(src.data + src.step * iv))[iu * 3 + 2] * (1 - Abs(uv.x - iu)) + \((uchar*)(src.data + src.step * iv))[(iu + 1) * 3 + 2] * (uv.x - iu);f2.x = ((uchar*)(src.data + src.step * (iv + 1)))[iu * 3] * (1 - Abs(uv.x - iu)) + \((uchar*)(src.data + src.step * (iv + 1)))[(iu + 1) * 3] * (uv.x - iu);f2.y = ((uchar*)(src.data + src.step * (iv + 1)))[iu * 3 + 1] * (1 - Abs(uv.x - iu)) + \((uchar*)(src.data + src.step * (iv + 1)))[(iu + 1) * 3 + 1] * (uv.x - iu);f2.z = ((uchar*)(src.data + src.step * (iv + 1)))[iu * 3 + 2] * (1 - Abs(uv.x - iu)) + \((uchar*)(src.data + src.step * (iv + 1)))[(iu + 1) * 3 + 2] * (uv.x - iu);((uchar*)(dst.data + dst.step * j))[i * 3] = f1.x * (1 - Abs(uv.y - iv)) + f2.x * (Abs(uv.y - iv)); //三个通道进行赋值((uchar*)(dst.data + dst.step * j))[i * 3 + 1] = f1.y * (1 - Abs(uv.y - iv)) + f2.y * (Abs(uv.y - iv));((uchar*)(dst.data + dst.step * j))[i * 3 + 2] = f1.z * (1 - Abs(uv.y - iv)) + f2.z * (Abs(uv.y - iv));}
}//图像局部缩放算法
void LocalTranslationWarp_Eye(Mat& img, Mat& dst, int warpX, int warpY, int endX, int endY, float radius)
{//平移距离 float ddradius = radius * radius;//计算|m-c|^2//size_t mc = (endX - warpX) * (endX - warpX) + (endY - warpY) * (endY - warpY);//计算 图像的高 宽 通道数量int height = img.rows;int width = img.cols;int chan = img.channels();auto Abs = [&](float f) {return f > 0 ? f : -f;};for (int i = 0; i < width; i++){for (int j = 0; j < height; j++){// # 计算该点是否在形变圆的范围之内//# 优化,第一步,直接判断是会在(startX, startY)的矩阵框中if ((Abs(i - warpX) > radius) && (Abs(j - warpY) > radius))continue;float distance = (i - warpX) * (i - warpX) + (j - warpY) * (j - warpY);if (distance < ddradius){float rnorm = sqrt(distance) / radius;float ratio = 1 - (rnorm - 1) * (rnorm - 1) * 0.5;//映射原位置float UX = warpX + ratio * (i - warpX);float UY = warpY + ratio * (j - warpY);//根据双线性插值得到UX UY的值BilinearInsert(img, dst, UX, UY, i, j);}}}
}//大眼效果
Mat on_BigEye(int b, Mat src, vector<Point2f> points_vec)
{Mat dst = src.clone();Point2f left_landmark = points_vec[38];Point2f left_landmark_down = points_vec[27];Point2f right_landmark = points_vec[44];Point2f right_landmark_down = points_vec[27];Point2f endPt = points_vec[30];//# 计算第4个点到第6个点的距离作为距离/*float r_left = sqrt((left_landmark.x - left_landmark_down.x) * (left_landmark.x - left_landmark_down.x) +(left_landmark.y - left_landmark_down.y) * (left_landmark.y - left_landmark_down.y));cout << "左眼距离:" << r_left;*/float r_left = b;// # 计算第14个点到第16个点的距离作为距离//float r_right = sqrt(// (right_landmark.x - right_landmark_down.x) * (right_landmark.x - right_landmark_down.x) +// (right_landmark.y - right_landmark_down.y) * (right_landmark.y - right_landmark_down.y));//cout << "右眼距离:" << r_right;float r_right = b;// # 瘦左 //LocalTranslationWarp_Eye(src, dst, left_landmark.x, left_landmark.y, endPt.x, endPt.y, r_left);// # 瘦右LocalTranslationWarp_Eye(src, dst, right_landmark.x, right_landmark.y, endPt.x, endPt.y, r_right);return dst;
}3、图像结果
大眼睛结果

相关文章:
基于人脸68特征点识别的美颜算法(一) 大眼算法 C++
1、加载一张原图,并识别人脸的68个特征点 cv::Mat img cv::imread("5.jpg");// 人脸68特征点的识别函数vector<Point2f> points_vec dectectFace68(img);// 大眼效果函数Mat dst0 on_BigEye(800, img, points_vec);2、函数 vector<Point2f&g…...

算法金 | 欧氏距离算法、余弦相似度、汉明、曼哈顿、切比雪夫、闵可夫斯基、雅卡尔指数、半正矢、Sørensen-Dice
大侠幸会,在下全网同名「算法金」 0 基础转 AI 上岸,多个算法赛 Top 「日更万日,让更多人享受智能乐趣」 抱个拳,送个礼 在算法模型构建中,我们经常需要计算样本之间的相似度,通常的做法是计算样本之间的距…...

项目实战--Spring Boot大数据量报表Excel优化
一、项目场景 项目中要实现交易报表,处理大规模数据导出时,出现单个Excel文件过大导致性能下降的问题,需求是导出大概四千万条数据到Excel文件,不影响正式环境的其他查询。 二、方案 1.使用读写分离,查询操作由从库…...

C#编程技术指南:从入门到精通的全面教程
无论你是编程新手,还是想要深化.NET技能的开发者,本文都将为你提供一条清晰的学习路径,从C#基础到高级特性,每一站都配有详尽解析和实用示例,旨在帮助你建立坚实的知识体系,并激发你对C#及.NET生态的热情。…...

Redis+定式任务实现简易版消息队列
Redis是一个开源的内存中数据结构存储系统,通常被用作数据库、缓存和消息中间件。 Redis主要将数据存储在内存中,因此读写速度非常快。 支持不同的持久化方式,可以将内存中的数据定期写入磁盘,保证数据持久性。 redis本身就有自己…...

学习在 C# 中使用 Lambda 运算符
在 C# 中,lambda 运算符 > 同时用于 lambda 表达式和表达式体成员。 1. Lambda 表达式 Lambda 表达式是一种简洁的表示匿名方法(没有名称的方法)的方法。它使用 lambda 运算符 >,可以读作“转到”。运算符的左侧指定输入参…...
)
数据结构和算法,单链表的实现(kotlin版)
文章目录 数据结构和算法,单链表的实现(kotlin版)b站视频链接1.定义接口,我们需要实现的方法2.定义节点,表示每个链表节点。3.push(e: E),链表尾部新增一个节点4.size(): Int,返回链表的长度5.getValue(index: Int): E…...

Jdk17是否有可能代替 Jdk8
JDK发展历史和开源 2006年SUN公司开源JDK,成立OpenJDK组织。2009年Oracle收购SUN,加快JDK发布周期。Oracle JDK与OpenJDK功能基本一致,但Oracle JDK提供更长时间的更新支持。 JDK版本特性 JDK11是长期支持版本(LTS)…...

oca和 ocp有什么区别
OCA(Oracle Certified Associate)和OCP(Oracle Certified Professional)在Oracle的认证体系中是两种不同级别的认证,它们之间存在明显的区别。以下是对两者区别的详细解释: 认证级别: OCA&…...

煤矿安全大模型:微调internlm2模型实现针对煤矿事故和煤矿安全知识的智能问答
煤矿安全大模型————矿途智护者 使用煤矿历史事故案例,事故处理报告、安全规程规章制度、技术文档、煤矿从业人员入职考试题库等数据,微调internlm2模型实现针对煤矿事故和煤矿安全知识的智能问答。 本项目简介: 近年来,国家对煤矿安全生产的重视程度不断提升。为了确…...

C++中的C++中的虚析构函数的作用和重要性
在C中,虚析构函数(virtual destructor)的作用和重要性主要体现在多态和继承的上下文中。了解这一点之前,我们先简要回顾一下多态和继承的基本概念。 继承与多态 继承:允许我们定义一个基类(也称为父类或超…...

机器学习 - 文本特征处理之 TF 和 IDF
TF(Term Frequency,词频)和IDF(Inverse Document Frequency,逆文档频率)是文本处理和信息检索中的两个重要概念,常用于计算一个词在文档中的重要性。下面是详细解释: TF(…...
因为自己淋过雨所以想给嵌入式撑把伞
在开始前刚好我有一些资料,是我根据网友给的问题精心整理了一份「嵌入式的资料从专业入门到高级教程」, 点个关注在评论区回复“888”之后私信回复“888”,全部无偿共享给大家!!!新手学嵌入式,…...

《C++20设计模式》中单例模式
文章目录 一、前言二、饿汉式1、实现 三、懒汉式1、实现 四、最后 一、前言 单例模式定义: 单例模式(Singleton Pattern)是一种创建型设计模式,其主要目的是确保一个类只有一个实例,并提供全局访问点来访问这个实例。…...
前端技术(说明篇)
Introduction ##编写内容:1.前端概念梳理 2.前端技术种类 3.前端学习方式 ##编写人:贾雯爽 ##最后更新时间:2024/07/01 Overview 最近在广州粤嵌进行实习,项目名称是”基于Node实现多人聊天室“,主要内容是对前端界…...

带电池监控功能的恒流直流负载组
EAK的交流和直流工业电池负载组测试仪对于测试和验证关键电力系统的能力至关重要,旨在实现最佳精度。作为一家客户至上的公司,我们继续尽我们所能应对供应链挑战,以提供出色的交货时间,大约是行业其他公司的一半。 交流负载组 我…...

关于Disruptor监听策略
Disruptor框架提供了多种等待策略,每种策略都有其适用的场景和特点。以下是这些策略的详细介绍及其适用场景: 1. BlockingWaitStrategy 特点: 使用锁和条件变量进行线程间通信,线程在等待时会进入阻塞状态,释放CPU资…...
)
大数据面试题之HBase(3)
HBase的预分区 HBase的热点问题 HBase的memstore冲刷条件 HBase的MVCC HBase的大合并与小合并,大合并是如何做的?为什么要大合并 既然HBase底层数据是存储在HDFS上,为什么不直接使用HDFS,而还要用HBase HBase和Phoenix的区别 HBase支…...

c#中赋值、浅拷贝和深拷贝
在 C# 编程中,深拷贝(Deep Copy)和浅拷贝(Shallow Copy)是用于复制对象的两种不同方式,它们在处理对象时有着重要的区别和适用场景。 浅拷贝(Shallow Copy) 浅拷贝是指创建一个新对…...
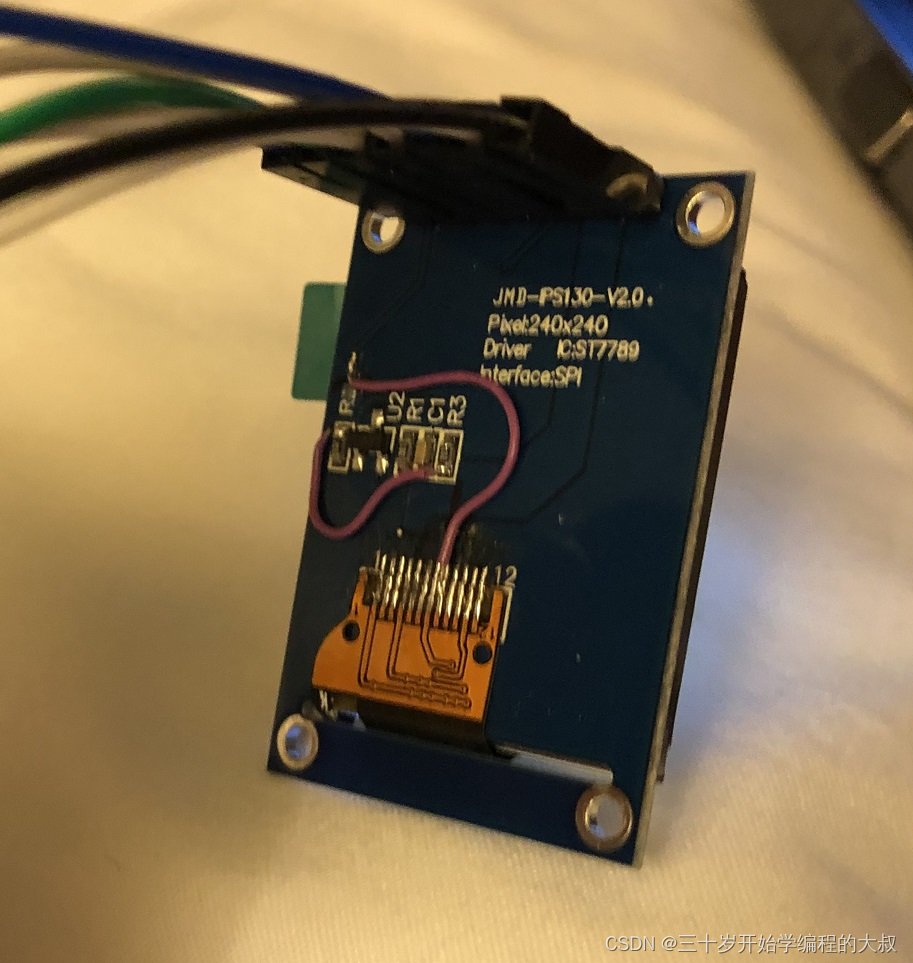
旧版st7789屏幕模块 没有CS引脚的天坑 已解决!!!
今天解决了天坑一个,大家可能有的人买的是st7789屏幕模块,240x240,1.3寸的 他标注的是老版,没有CS引脚,小崽子长这样: 这熊孩子用很多通用的驱动不吃,死活不显示,网上猛搜ÿ…...

OpenClaw+GLM-4.7-Flash数据助手:Excel报表自动生成与分析
OpenClawGLM-4.7-Flash数据助手:Excel报表自动生成与分析 1. 为什么需要自动化数据助手 作为一位经常与Excel报表打交道的分析师,我每天要花大量时间重复执行数据清洗、格式转换和基础分析。最痛苦的是每月底需要手动合并十几个分公司的销售数据&#…...

百川2-13B中文优势:OpenClaw在本地化办公场景中的特殊优化技巧
百川2-13B中文优势:OpenClaw在本地化办公场景中的特殊优化技巧 1. 为什么选择百川2-13B处理中文办公文档 去年我在整理团队季度报告时,曾尝试用多个开源模型处理中文PDF和微信群聊记录。当通用英文模型遇到中文标点符号和行业术语时,要么漏…...

CGAL::Point_set_3 成员函数自查表
参考来源: CGAL 6.1.1 - 3D Point Set: CGAL::Point_set_3< Point, Vector > Class Template Reference 一、基础构造 / 容量 返回值函数名作用小 demoPoint_set_3()构造空点集Point_set ps;size_tnumber_of_points()获取点数auto n ps.number_of_points(…...

避坑指南:思科模拟器做链路聚合时,你可能会遇到的5个报错及解决方法
思科模拟器链路聚合实战:5个典型报错分析与精准排错指南 在Packet Tracer中配置链路聚合时,最令人头疼的往往不是基础配置步骤,而是那些突如其来的报错信息。上周有位学员在CCNA备考群里发了一张截图:%EC-5-CANNOT_BUNDLE2: Fa0/2…...

从逆向工程到实战:深度解析钉钉本地数据取证与加密对抗
1. 钉钉本地数据存储结构解析 第一次拆解钉钉的数据库文件时,我对着那堆加密的.sqlite文件发了半小时呆。作为国内用户量最大的企业通讯工具,钉钉在数据保护上确实下了狠功夫。Android和iOS两个平台的数据存储方式既有共性又存在微妙差异,这正…...

RTX4090D加持下的OpenClaw:Qwen3-32B多任务并行处理实测
RTX4090D加持下的OpenClaw:Qwen3-32B多任务并行处理实测 1. 测试背景与硬件配置 去年底我入手了RTX4090D显卡,一直想找个机会测试它在AI工作负载下的真实表现。最近在部署OpenClaw时,发现其多任务调度能力对显存和计算资源的需求极高&#…...

Keil MDK-ARM中map文件解析与内存管理
Keil MDK-ARM中map文件全面解析1. 项目概述在嵌入式系统开发过程中,内存管理是至关重要的环节。map文件作为编译链接过程中生成的中间文件,包含了程序内存布局的完整映射信息。对于使用Keil MDK-ARM开发环境的工程师而言,深入理解map文件的结…...

腾讯地图SDK隐私协议合规接入实战:你的App真的合法显示地图了吗?
腾讯地图SDK隐私合规实战:从法律条文到代码落地的全流程指南 当你的App因为地图功能被应用商店拒审时,当用户投诉你的应用"偷偷收集位置信息"时,当合规团队发来长达20页的整改清单时——这些场景正在成为移动开发者的日常。去年某社…...

洛雪音乐音源终极指南:5分钟解锁全网无损音乐资源
洛雪音乐音源终极指南:5分钟解锁全网无损音乐资源 【免费下载链接】lxmusic- lxmusic(洛雪音乐)全网最新最全音源 项目地址: https://gitcode.com/gh_mirrors/lx/lxmusic- 洛雪音乐音源是专为洛雪音乐客户端设计的强大插件集合,能够帮助你轻松获取…...

终极OBS Studio直播软件指南:5步打造专业级智能直播系统
终极OBS Studio直播软件指南:5步打造专业级智能直播系统 【免费下载链接】obs-studio OBS Studio - 用于直播和屏幕录制的免费开源软件。 项目地址: https://gitcode.com/GitHub_Trending/ob/obs-studio 想象一下这样的场景:你正在直播一场重要的…...