【目标检测】DINO
一、引言
论文: DINO: DETR with Improved DeNoising Anchor Boxes for End-to-End Object Detection
作者: IDEA
代码: DINO
注意: 该算法是在Deformable DETR、DAB-DETR、DN-DETR基础上的改进,在学习该算法前,建议先掌握相关知识。
特点: 提出对比去噪训练方法,相比原DN-DETR中的去噪训练方法引入了负查询来避免重复的和不期望的预测;提出混合查询选择方法,相比原Deformable DETR中的查询选择方法移除了由编码器输出初始化解码器内容查询的部分;提出向前看两层的锚框更新方法,相比原Deformable DETR中向前看一层的锚框更新方法将梯度更新扩展到了前一层。
二、详情
DINO与其他DETR系列方法一样,包括backbone、编码器、解码器、预测头。DINO融合了Deformable DETR、DAB-DETR、DN-DETR的各种策略,例如多尺度特征图输入、可变形注意力、解码器位置查询由4D锚框表达、使用编码器输出初始化解码器输入、去噪训练、逐层更新预测框等等。
针对后三个策略,DINO又做了简单的改进。
2.1 对比去噪训练(Contrastive DeNoising Training)
DN-DETR提出去噪训练来提升模型收敛速度。但是该方法有两个问题:
(1)可能产生重复的预测。 对于同一个目标可能产生多个十分接近的预测,由于DETR系列方法都不需要执行NMS,这些不必要的预测无法被滤除,最终会对性能会有一定的影响。
(2)无法拒绝距离真实目标较远的预测。 即使预测框内无任何目标,如果它的置信分数较大也可能被选中并留到最后,这种无效预测也会影响模型性能。
对比去噪训练引入了显式的难分负样本,在训练时将其分为“no object”,从而使模型具有拒绝无用锚框的能力来解决这两个问题。与难分负样本对应的带噪正样本。事实上,正负都是通过在真实锚框和标签上增加噪声产生的,只是正负样本的噪声等级不同。下图是一个二维数据的正负样本区别示意图:

可见,作者增加了两个超参数, λ 1 < λ 2 \lambda_1<\lambda_2 λ1<λ2。所有噪声等级小于 λ 1 \lambda_1 λ1的都视作正样本,所有等级大于 λ 1 \lambda_1 λ1但小于 λ 2 \lambda_2 λ2的都视作负样本。 当 λ 1 \lambda_1 λ1和 λ 2 \lambda_2 λ2差别不大时,负样本就可以视为难分负样本,因为它与正样本的区别不大,作者表示这样能提升性能。
以真实目标框归一化后的宽 w = 0.26 w=0.26 w=0.26为例, λ 1 = 1 , λ 2 = 2 \lambda_1=1, \lambda_2=2 λ1=1,λ2=2,那么在 [ ( 1 − λ 1 ) w , ( 1 + λ 1 ) w ] = [ 0 , 0.52 ] [(1-\lambda_1)w,(1+\lambda_1)w]=[0,0.52] [(1−λ1)w,(1+λ1)w]=[0,0.52]范围内随机取一个值就形成了正样本的宽,在 [ ( 1 − λ 2 ) w , ( 1 − λ 1 ) w ] = [ − 0.26 , 0 ] [(1-\lambda_2)w,(1-\lambda_1)w]=[-0.26,0] [(1−λ2)w,(1−λ1)w]=[−0.26,0]或 [ ( 1 + λ 1 ) w , ( 1 + λ 2 ) w ] = [ 0.52 , 0.78 ] [(1+\lambda_1)w,(1+\lambda_2)w]=[0.52,0.78] [(1+λ1)w,(1+λ2)w]=[0.52,0.78]范围内取一个值就形成了负样本的宽。
有了正负样本之后,训练时,正样本仍然使用重构损失,即锚框回归使用 l 1 l_1 l1和GIOU损失,标签分类使用focal损失。负样本因为原本就远离真实目标框了,所以框不必优化,而是希望将负样本分类为“no object”,使用focal损失。
除正负样本的生成与损失外,DINO与DN-DETR的区别还有以下几点:
(1)DN-DETR将匹配部分的内容查询(解码器嵌入)改为了类别标签嵌入,所以设置了一个指示项来区分匹配部分和去噪部分,但是DINO没有改变匹配部分的解码器嵌入所以不需要指示项。DN-DETR使用nn.Embedding初始化一个尺寸为 ( n u m _ c l a s s e s + 1 , h i d d e n _ d i m − 1 ) (num\_classes+1,hidden\_dim-1) (num_classes+1,hidden_dim−1)的矩阵, − 1 -1 −1留给指示项;DINO中初始化一个尺寸为 ( n u m _ c l a s s e s + 1 , h i d d e n _ d i m ) (num\_classes+1,hidden\_dim) (num_classes+1,hidden_dim)的矩阵。
(2)上面DN-DETR初始化的矩阵 + 1 +1 +1留给了匹配部分的内容查询,DINO的 + 1 +1 +1则是留给负样本。
(3)与DN-DETR一样,DINO会施加不同版本的噪声到真实目标的框和标签上。每组中每个真实目标的框和标签都会产生一个正样本和一个负样本。不同的是,DN-DETR固定每次都分5组,DINO则采取了动态组数的策略,当前批次数据中目标多时就组数就少一些,反之就多一些。
2.2 混合查询选择(Mixed Query Selection)
该操作仅针对匹配部分,不影响去噪部分。
DETR、Deformable DETR、DINO的解码器查询初始化间的差异如下图所示:
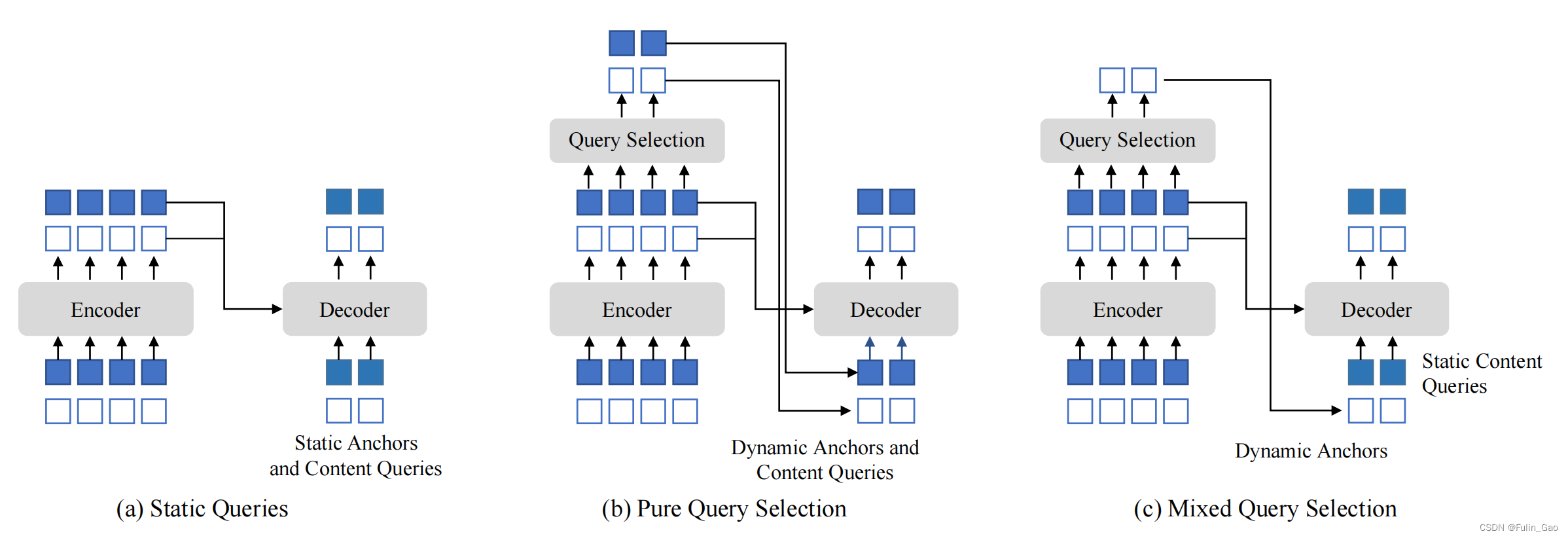
DETR的内容查询是初始化为0,位置查询是用nn.Embedding随机初始化成可学习的参数。
Deformable DETR的内容查询和位置查询均由编码器输出导出。 首先编码器输出memory经过一次不变维度的全连接映射,再经过预测头预测类别和框,取类别分数topk的框(k和解码查询数量300一致),之后将topk的框的4个值进行位置编码再经过一次不变维度的全连接映射,最后分割为两部分分别作为解码器的初始化内容和位置查询。
可以看出将框的值经过位置编码再做全连接和分割感觉并不是很合理,毕竟内容查询用位置编码的映射做初始化没什么道理。所以DINO直接把topk的4个值作为位置查询的初始化,而内容查询的初始化是用nn.Embedding随机初始化成可学习的参数。
2.3 向前看两层的锚框更新(Look Forward Twice)
每层解码器输出都参与损失计算时才有用。
Deformable DETR、DINO的锚框更新间的差异如下图所示:
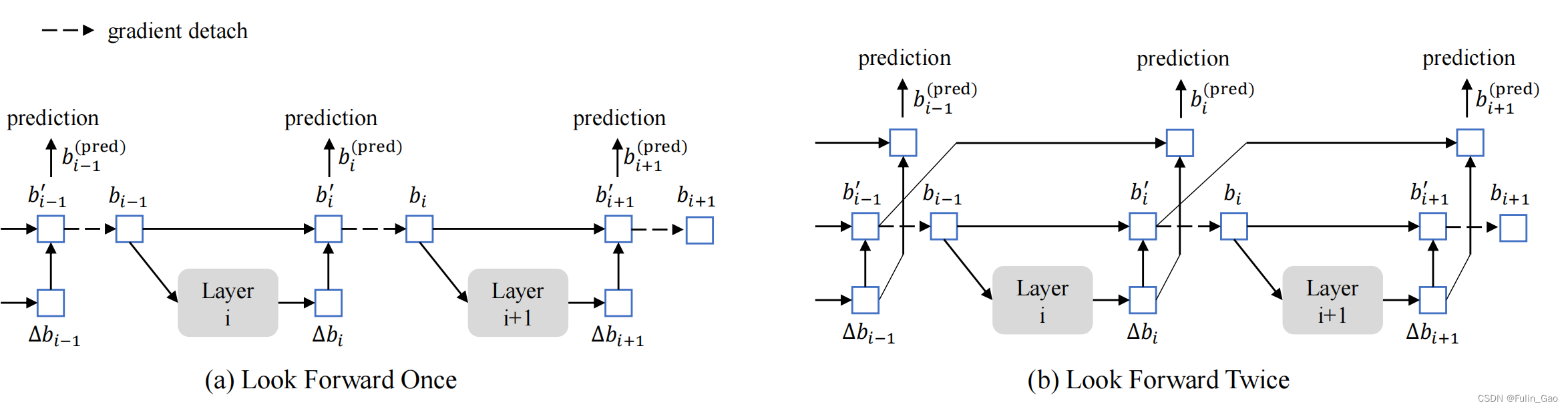
Deformable DETR的解码器层会预测锚框的偏移量从而逐层更新锚框。 例如上图(a)中 b i − 1 b_{i-1} bi−1是上一层的锚框预测,经 L a y e r i Layer_i Layeri后得出偏移量 Δ b i \Delta b_i Δbi,综合得出该层锚框预测 b i ′ b_i^{\prime} bi′。
但是每层的预测结果在进行损失计算时只会影响当前层的参数更新,例如 b i ′ b_i^{\prime} bi′作为第 i i i层的预测传入第 i + 1 i+1 i+1层前会被detach,即上图(a)中的虚线。detach后 b i ′ b_i^{\prime} bi′和 b i b_i bi值相同但与该项相关的损失梯度就无法从第 i + 1 i+1 i+1层传到第 i i i层。
作者认为后一层的信息可能有助于修正前一层的锚框偏移量,所以把预测 b i p r e d b_i^{pred} bipred从 b i − 1 + Δ b i b_{i-1}+\Delta b_i bi−1+Δbi改为了 b i − 1 ′ + Δ b i b^{\prime}_{i-1}+\Delta b_i bi−1′+Δbi。 这样第 i + 1 i+1 i+1层的梯度可以传递到第 i + 1 i+1 i+1层和第 i i i层,同时指导 L a y e r i Layer_i Layeri和 L a y e r i + 1 Layer_{i+1} Layeri+1的更新,再往前就不行了,如下图所示:

致谢:
本博客仅做记录使用,无任何商业用途,参考内容如下:
DINO 论文简介
DINO 源码解析
相关文章:
【目标检测】DINO
一、引言 论文: DINO: DETR with Improved DeNoising Anchor Boxes for End-to-End Object Detection 作者: IDEA 代码: DINO 注意: 该算法是在Deformable DETR、DAB-DETR、DN-DETR基础上的改进,在学习该算法前&#…...
一文包学会ElasticSearch的大部分应用场合
ElasticSearch 官网下载地址:Download Elasticsearch | Elastic 历史版本下载地址1:Index of elasticsearch-local/7.6.1 历史版本下载地址2:Past Releases of Elastic Stack Software | Elastic ElasticSearch的安装(windows) 安装前所…...

创建kobject
1、kobject介绍 kobject的全称是kernel object,即内核对象。每一个kobject都会对应系统/sys/下的一个目录。 2、相关结构体和api介绍 2.1 struct kobject // include/linux/kobject.h 2.2 kobject_create_and_add kobject_create_and_addkobject_createkobj…...

数据结构 - C/C++ - 树
公开视频 -> 链接点击跳转公开课程博客首页 -> 链接点击跳转博客主页 目录 树的概念 结构特性 树的样式 树的存储 树的遍历 节点增删 二叉搜索树 平衡二叉树 树的概念 二叉树是树形结构,是一种非线性结构。 非线性结构:在二叉树中&#x…...
Linux源码阅读笔记12-RCU案例分析
在之前的文章中我们已经了解了RCU机制的原理和Linux的内核源码,这里我们要根据RCU机制写一个demo来展示他应该如何使用。 RCU机制的原理 RCU(全称为Read-Copy-Update),它记录所有指向共享数据的指针的使用者,当要修改构想数据时&…...

【C++】双线性差值算法实现RGB图像缩放
双线性差值算法 双线性插值(Bilinear Interpolation)并不是“双线性差值”,它是一种在二维平面上估计未知数据点的方法,通常用于图像处理中的图像缩放。 双线性插值的基本思想是:对于一个未知的数据点,我…...

计算机网络知识普及之四元组
在涉及到TCP/UDP等IP类通信协议时,存在四元组概念 这里只是普及使用 先来一些前置知识,什么是IP协议? IP协议全称为互联网协议,处于网络层中,主要作用是标识网络中的设备,每个设备的IP地址是唯一的。 在网…...

深度探讨网络安全:挑战、防御策略与实战案例
目录 编辑 一、引言 二、网络安全的主要挑战 恶意软件与病毒 数据泄露 分布式拒绝服务攻击(DDoS) 内部威胁 三、防御策略与实战案例 恶意软件防护 网络钓鱼防护 数据泄露防护 总结 一、引言 随着信息技术的迅猛发展,网络安全问…...

“穿越时空的机械奇观:记里鼓车的历史与科技探秘“
在人类文明的发展历程中,科技的创新与进步不仅仅推动了社会的进步,也为我们留下了丰富的文化遗产。记里鼓车,作为一种古老的里程计量工具,其历史地位和技术成就在科技史上具有重要的意义。本文将详细介绍记里鼓车的起源、结构原理…...
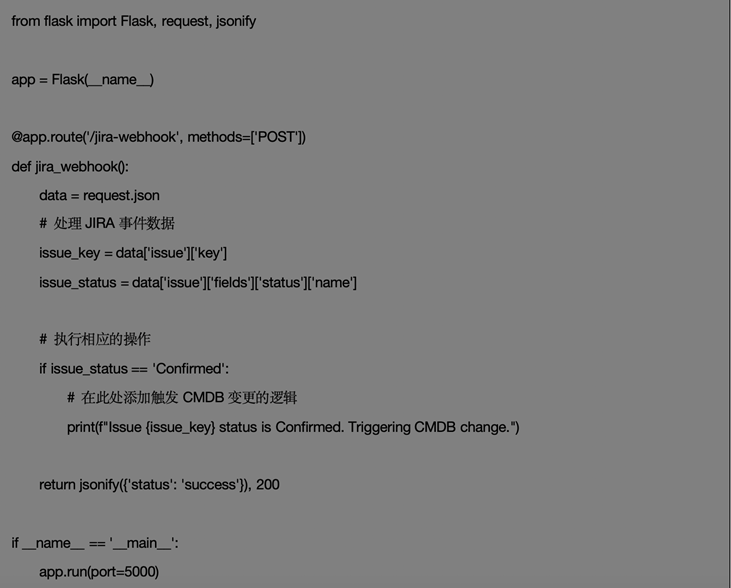
DevOps CMDB平台整合Jira工单
背景 在DevOps CMDB平台建设的过程中,我们可以很容易的将业务应用所涉及的云资源(WAF、K8S、虚拟机等)、CICD工具链(Jenkins、ArgoCD)、监控、日志等一次性的维护到CMDB平台,但随着时间的推移,…...
Vue-路由
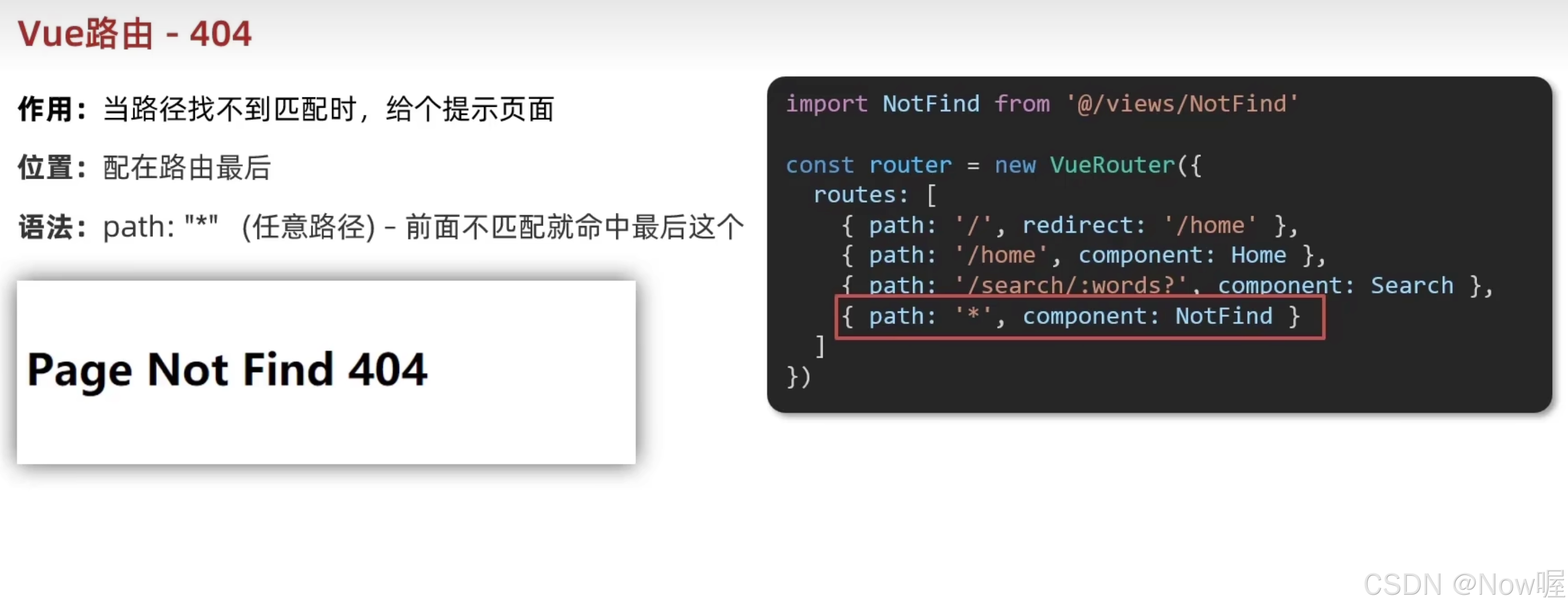
路由简介 SPA单页面应用。导航区和展示区 单页Web应用整个应用只有一个完整的页面点击页面中的导航连接不会刷新页面,只会做页面的局部更新数据需要通过ajax请求获取 路由:路由就是一组映射关系,服务器接收到请求时,根据请求路…...

【Rust入门教程】安装Rust
文章目录 前言Rust简介Rust的安装更新与卸载rust更新卸载 总结 前言 在当今的编程世界中,Rust语言以其独特的安全性和高效性吸引了大量开发者的关注。Rust是一种系统编程语言,专注于速度、内存安全和并行性。它具有现代化的特性,同时提供了低…...

Character.ai因内容审查流失大量用户、马斯克:Grok-3用了10万块英伟达H100芯片
ChatGPT狂飙160天,世界已经不是之前的样子。 更多资源欢迎关注 1、爆火AI惨遭阉割,1600万美国年轻人失恋?Character.ai被爆资金断裂 美国流行的社交软件Character.ai近期对模型进行大幅度内容审查,导致用户感到失望并开始流失。…...

Spring源码九:BeanFactoryPostProcessor
上一篇Spring源码八:容器扩展一,我们看到ApplicationContext容器通过refresh方法中的prepareBeanFactory方法对BeanFactory扩展的一些功能点,包括对SPEL语句的支持、添加属性编辑器的注册器扩展解决Bean属性只能定义基础变量的问题、以及一些…...

大模型笔记1: Longformer环境配置
论文: https://arxiv.org/abs/2004.05150 目录 库安装 LongformerForQuestionAnswering 库安装 首先保证电脑上配置了git. git环境配置: https://blog.csdn.net/Andone_hsx/article/details/87937329 3.1、找到git安装路径中bin的位置,如:D:\Prog…...
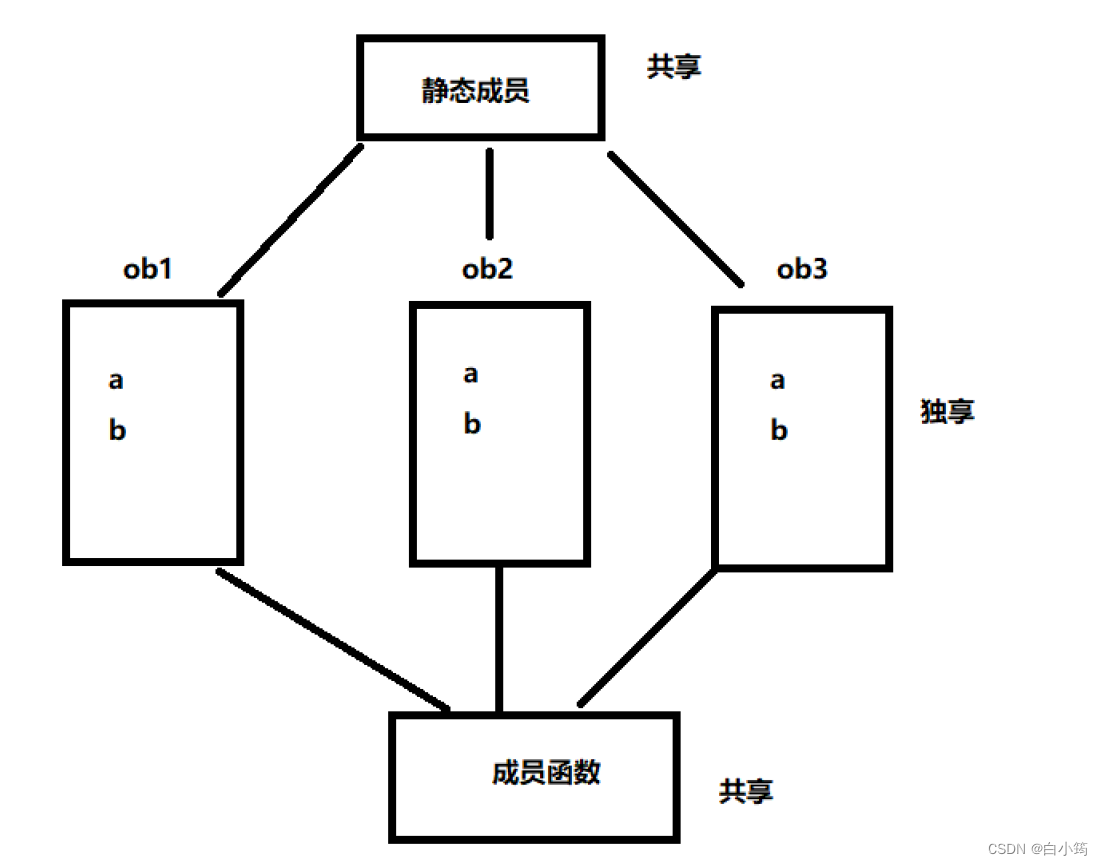
类和对象(提高)
类和对象(提高) 1、定义一个类 关键字class 6 class Data1 7 { 8 //类中 默认为私有 9 private: 10 int a;//不要给类中成员 初始化 11 protected://保护 12 int b; 13 public://公共 14 int c; 15 //在类的内部 不存在权限之分 16 void showData(void)…...

免费最好用的证件照制作软件,一键换底+老照片修复+图片动漫化,吊打付费!
这款软件真的是阿星用过的,最好用的证件照制作软件,没有之一! 我是阿星,今天要给大家安利一款超实用的证件照工具,一键换底,自动排版,免费无广告,让你在家就能轻松搞定证件照&#…...
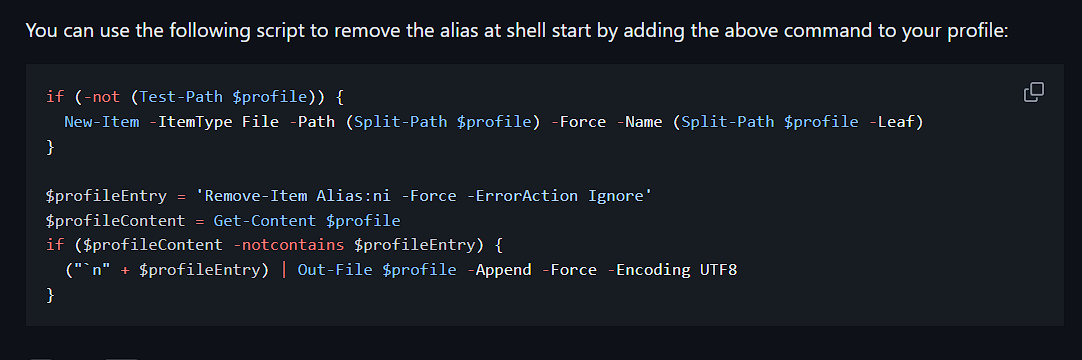
antfu/ni 在 Windows 下的安装
问题 全局安装 ni 之后,第一次使用会有这个问题 解决 在 powershell 中输入 Remove-Item Alias:ni -Force -ErrorAction Ignore之后再次运行 ni Windows 11 下的 Powershell 环境配置 可以参考 https://github.com/antfu-collective/ni?tabreadme-ov-file#how …...
Linux 生产消费者模型
💓博主CSDN主页:麻辣韭菜💓 ⏩专栏分类:Linux初窥门径⏪ 🚚代码仓库:Linux代码练习🚚 🌹关注我🫵带你学习更多Linux知识 🔝 前言 1. 生产消费者模型 1.1 什么是生产消…...

深入浅出:MongoDB中的背景创建索引
深入浅出:MongoDB中的背景创建索引 想象一下,你正忙于将成千上万的数据塞入你的MongoDB数据库中,你的用户期待着实时的响应速度。此时,你突然想到:“嘿,我应该给这些查询加个索引!” 没错&…...

PostgreSQL CASE语句深度解析:性能、类型与NULL安全实战指南
1. 为什么你必须真正吃透 PostgreSQL 的 CASE 语句——它远不止是 SQL 里的“if-else”翻译器在 PostgreSQL 实战中,我见过太多人把CASE当成一个语法糖:写几个WHEN...THEN,加个ELSE,再套个END,就以为搞定了。结果呢&am…...

FCEUX终极指南:从怀旧游戏到专业调试的完整NES模拟器教程
FCEUX终极指南:从怀旧游戏到专业调试的完整NES模拟器教程 【免费下载链接】fceux FCEUX, a NES Emulator 项目地址: https://gitcode.com/gh_mirrors/fc/fceux FCEUX是一款功能强大的开源NES模拟器,让你在现代电脑上完美重温经典红白机游戏。无论…...

古戏台构件声学特性的时域有限差分方法【附模型】
✨ 长期致力于时域有限差分法、窑洞、戏台、八字墙、共形技术研究工作,擅长数据搜集与处理、建模仿真、程序编写、仿真设计。 ✅ 专业定制毕设、代码 ✅ 如需沟通交流,点击《获取方式》 (1)曲面共形网格快速生成算法: …...

Blender渲染通道完全指南:如何像电影后期一样,分离出深度、阴影与反射图
Blender渲染通道完全指南:影视级后期制作的深度解析在数字内容创作领域,Blender已经从一个简单的3D建模工具成长为能够处理复杂视觉特效的全流程解决方案。对于追求影视级质量的中高级用户而言,掌握渲染通道技术是提升作品专业度的关键一步。…...

除了排错,你可能不知道OPC Expert v8.1还能做这些:数据归档、计算与冗余实战
解锁OPC Expert v8.1的隐藏潜力:数据归档、实时计算与冗余架构实战指南在工业自动化领域,OPC Expert常被视为故障排查的"急救箱",但它的能力远不止于此。当大多数工程师还在用它解决DCOM配置问题时,少数先行者已经用它重…...

智慧无人机巡检-无人机可见光红外数据集 无人机多模态检测数据集 红外与可见光检测数据集
智慧无人机巡检-无人机可见光红外数据集,已完成标注,可导出各种常用数据集,yolo,voc,coco等格式。可见光33000张,红外16100张,目标一张一个 无人机可见光红外目标数据集项目详细信息数据集名称无…...

科华UPS电源全品类汇总:选型与场景适配指南
科华UPS电源作为国内智慧电能领域的主流产品,覆盖家用、办公、机房、工业等全场景,产品系列丰富、规格齐全,但多数用户在选型时,常因分不清系列差异、功率适配、架构类型而踩坑。本文系统汇总科华UPS电源的核心分类、主流系列、核…...

Hindsight测试策略:单元测试、集成测试和端到端测试
Hindsight测试策略:单元测试、集成测试和端到端测试 【免费下载链接】hindsight Hindsight: Agent Memory That Learns 项目地址: https://gitcode.com/GitHub_Trending/hindsight2/hindsight Hindsight作为一款专注于Agent Memory的开源项目,其可…...

<背包问题>
背包问题是一类组合优化问题,其基本形式是给定一组物品,每个物品都有一个重量和一个价值,以及一个有限的背包容量,目标是在不超过背包容量的前提下,选择物品使得背包中的物品价值最大化。动态规划是解决背包问题的常用…...

3分钟解锁网易云音乐NCM文件:ncmdumpGUI小白也能懂的完整教程
3分钟解锁网易云音乐NCM文件:ncmdumpGUI小白也能懂的完整教程 【免费下载链接】ncmdumpGUI C#版本网易云音乐ncm文件格式转换,Windows图形界面版本 项目地址: https://gitcode.com/gh_mirrors/nc/ncmdumpGUI 你是否曾经下载了网易云音乐的歌曲&a…...