【图像分割】mask2former:通用的图像分割模型详解
最近看到几个项目都用mask2former做图像分割,虽然是1年前的论文,但是其attention的设计还是很有借鉴意义,同时,mask2former参考了detr的query设计,实现了语义和实例分割任务的统一。
1.背景
1.1 detr简介
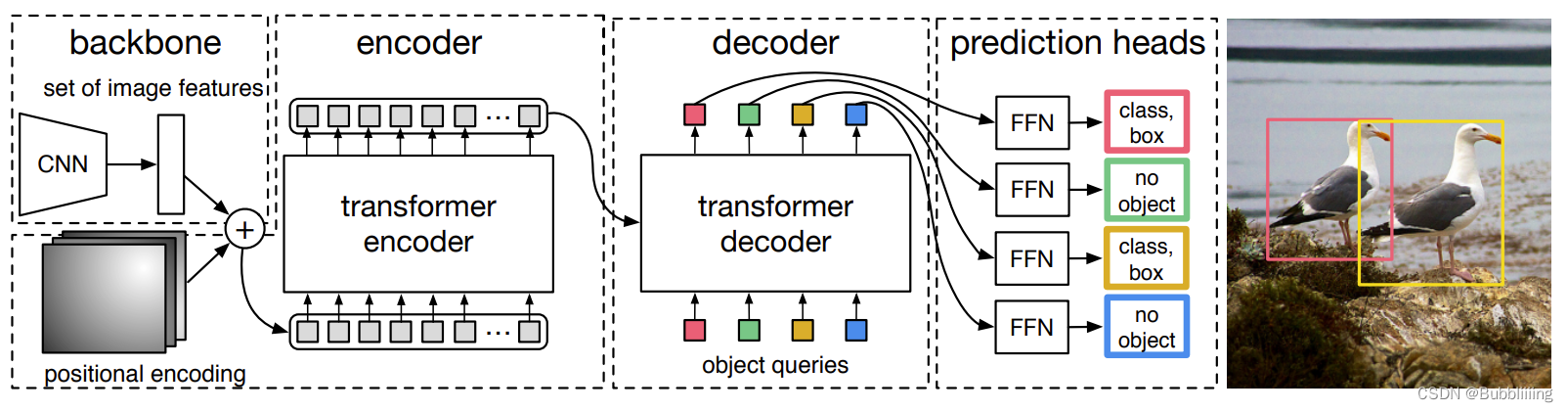
detr算是第一个尝试用transformer实现目标检测的框架,其设计思路也很简单,就是定义object queries,用来查询是否存在目标以及目标位置的,类似cnn检测中的rpn,产生候选框。在detr中,object queries为(100,b,256)的可学习的参数,其中每个256维的向量代表了检测的box信息,这个信息是由类别和空间信息(box坐标)组成,其中类别信息用于区别类别,而空间信息则描述了目标在图像中的位置。
通过设置query,则不需要像传统cnn检测时预设anchor,最后通过匈牙利匹配算法将query到的目标和gt进行匹配,计算loss。
decoder过程中,query object先初始化为0,然后经过self attention,再和encoder的输出进行cross attention。
1.2 Deformable-DETR简介
Deformable-Detr是在detr的基础上了主要做了2个改进,Deformable attention(可变形注意力)和多尺度特征,通过可变性注意力降低了显存,多尺度特征对小目标检测效果比较好。
(1)Deformable attention(可变形注意力)
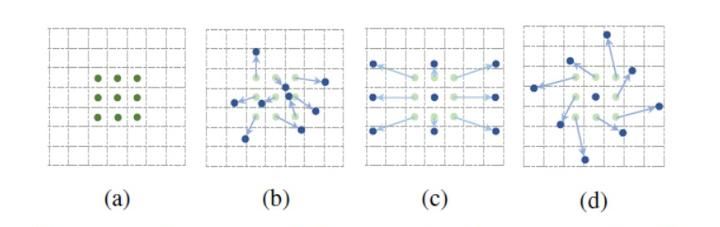
这个设计参考了可变性卷积(DCN),后续很多设计都参考了这个。先看下DCN,就是在标准卷积(a)的3 * 3的卷积核上,每个点上增加一个偏移量(dx,dy),让卷积核不规则,可以适应目标的形状和尺度。
对于一般的attention,query与key的每个值都要计算注意力,这样的问题就是耗显存;另外,对图像来说,假设其中有一个目标,一般只有离图像比较近的像素才有用,离比较远的像素,对目标的贡献很少,甚至还有负向的干扰。
Defromable attention的设计思路就是query不与全局的key进行计算,而是至于其周围的key进行计算。至于这个周围要选哪几个位置,就类似DCN,让模型自己去学。
- 单尺度的可变性注意力机制
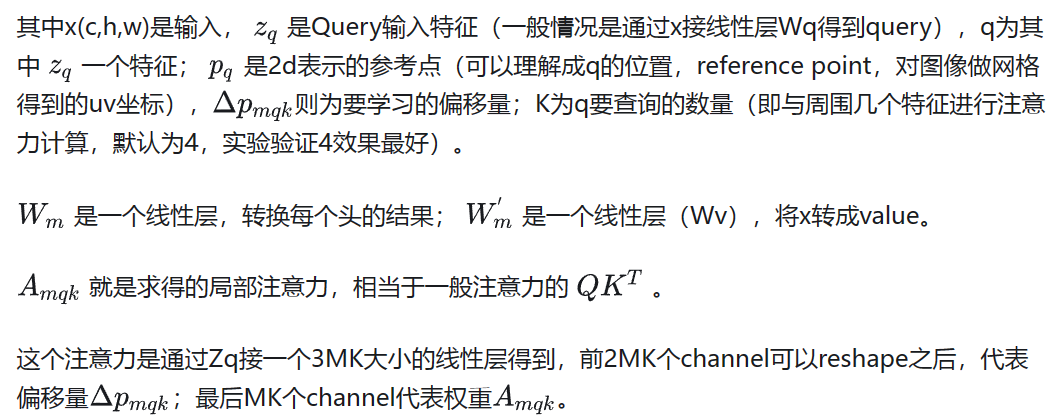
DeformAttn的公式如下:
- 多尺度的可变性注意力机制
多尺度即类似fpn,提取不同尺度的特征,但由于特征的尺寸不一样,需要将不同尺度的特征连接起来。
可变性注意力机制公式如下:

相比单尺度的,多尺度多了一个l,代表第几个尺度,一般取4个层级。
对于一个query,在其参考点(reference point)对应的所有层都采用K个点,然后将每层的K个点特征融合(相加)。
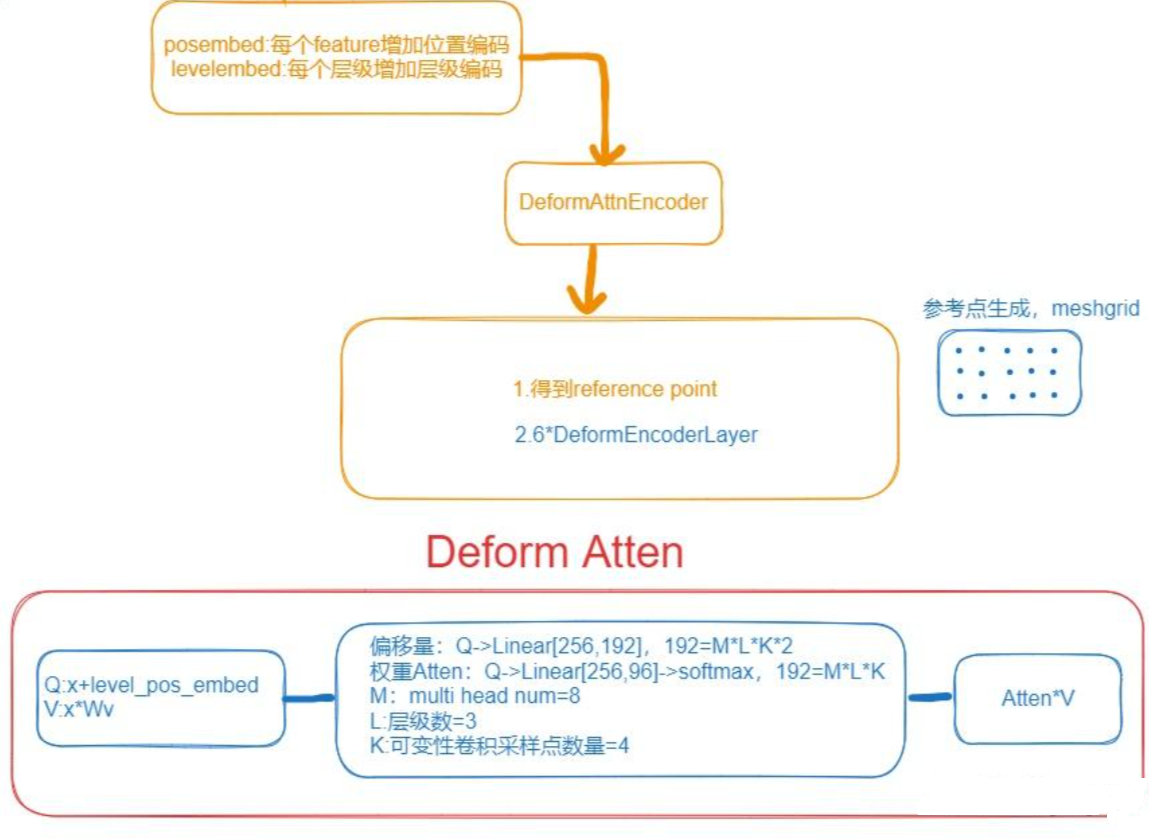
整个deformable atten的流程如下:
2.mask2former
mask2former的设计上使用了deformable detr的可变形注意力。
主要计算过程用下图表示:

2.1 模型改进
(1)masked attention
一般计算过程中,计算atten时只用前景部分计算,减少显存占用。
(2) 多分辨率特征
如上图,图像经过backbone得到4层特征,然后经过Pixel Decoder得到O1,O2,O3,O4,注意O1,O2,O3经过Linear+Deform atten Layer,O4只通过Linear+卷积得到,具体可以区别看上图。
(3) decoder优化
在transformer decoder(这个过程用的是标准attention)计算过程中,query刚开始都是随机初始化的,没有图像特征,如果按常规直接self attention可能学不到充分的信息,所以将ca和sa两个模块反过来,先和pixdecoder得到的图像O1,O2,O3计算ca,再继续计算sa。
2.2 类别和mask分开预测
class和mask预测独立开来,mask只预测是背景还是前景,class负责预测类别,这部分保留了maskformer的设计。
如上图,class通过query加上Linear直接将维度转到(n,k+1),其中k为类别数目。
mask通过decoder和最后一层的mask做外积运算,得到(k,h,w)的tensor,每个k代表一个前景。
采用这种query的方式,既可以做instance也可以做语义分割,query的数量N和类别K数量无关。
2.3 loss优化
mask decoder过程中,主要用最后一层的输出计算loss;同时为了辅助训练,默认开启了auxiliary loss(辅助loss),其他层的输出也去计算loss。
还有一个trick,mask计算loss时,不是mask上的所有点都去计算,而是随机采样一定数目的点去计算loss。默认设置K = 12544, i.e., 112 × 112 points,这样可以节省显存。
3.扩展
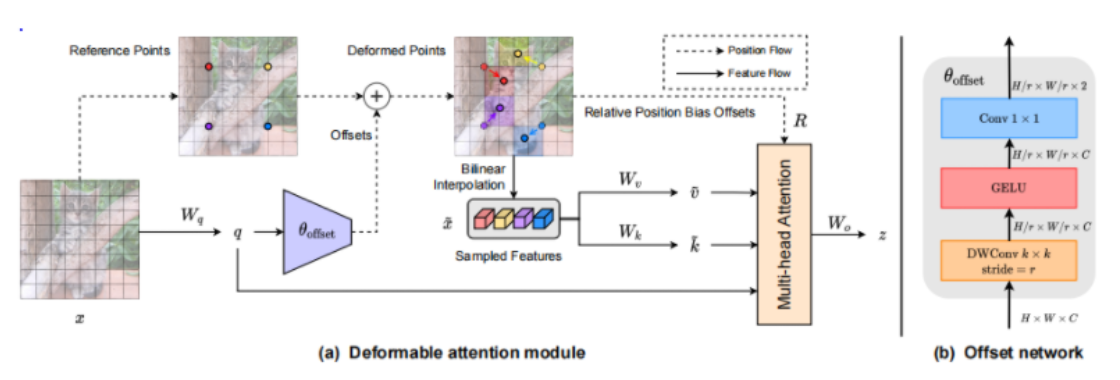
3.1 DAT:另一个Deform atten设计
另一篇deform atten的论文DAT,和deform attention思路类似,也是学习offset。只不过在偏移量设计上有区别,如下图所示,DAT在当前特征图F上学习offset时,进行了上采样2倍,在得到offset后需要插值回F的尺寸,增加了相对位置的bias。
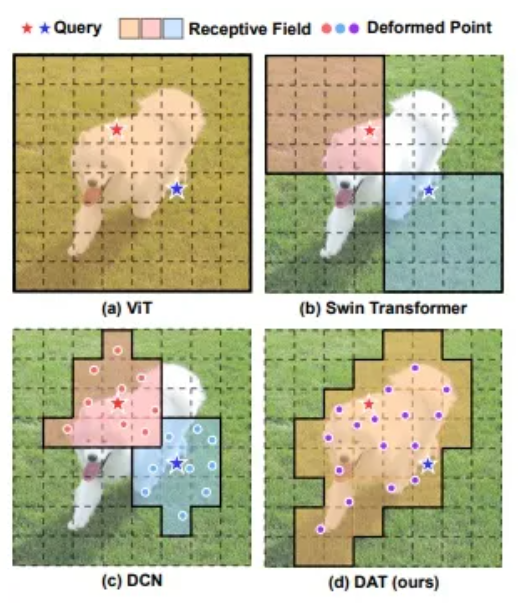
对比几种查询的注意力结果,vit是全查,swin固定窗口大小,有可能限制查到的key,DCN为可变性卷积,DAT学到的key更好。
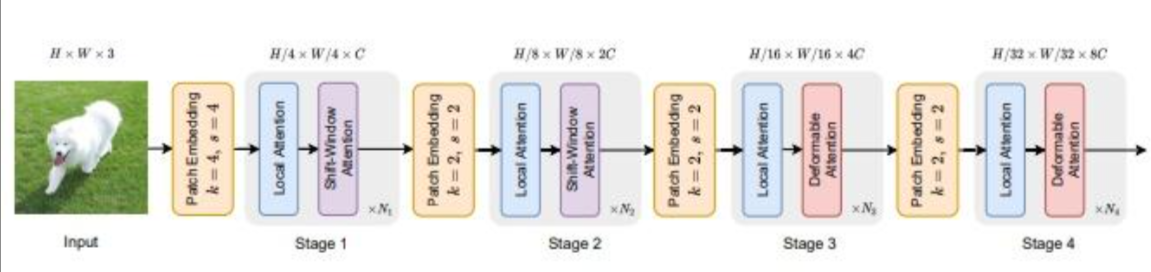
模型设计上,参考swin-transformer,只将最后2层替换Deformable attention,效果最好。
3.2 视频实例分割跟踪
mask2former用于视频分割,结构如下
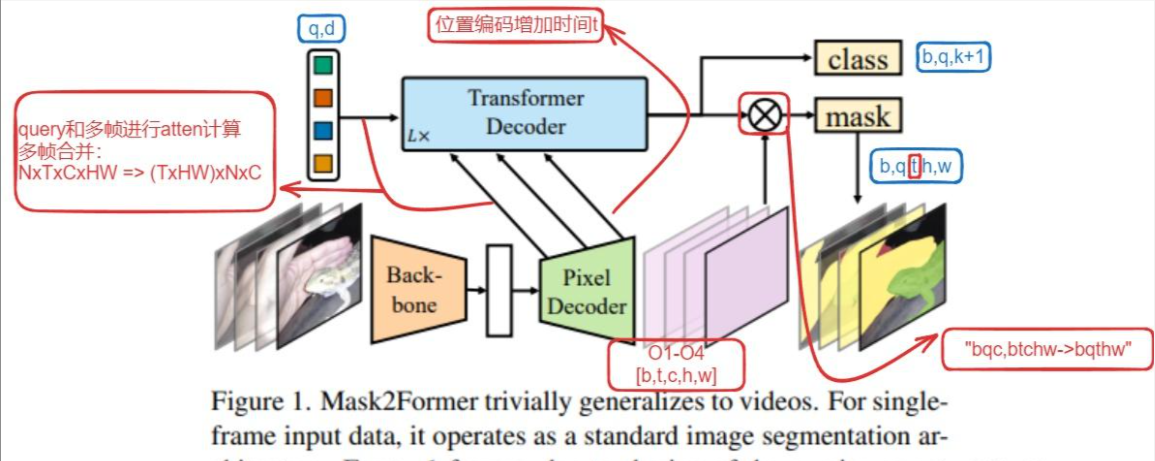
模型结构上和图像的分割基本一致。
修改主要在transformer decoder,包含以下3个地方:
(1)增加时间编码t
主要在Transformer decoder过程,图像的位置编码为(x,y),对于视频,由于考虑了多帧数据,增加时间t进行编码,位置编码为(x,y,t)。
# b, t, c, h, wassert x.dim() == 5, f"{x.shape} should be a 5-dimensional Tensor, got {x.dim()}-dimensional Tensor instead"if mask is None:mask = torch.zeros((x.size(0), x.size(1), x.size(3), x.size(4)), device=x.device, dtype=torch.bool)not_mask = ~maskz_embed = not_mask.cumsum(1, dtype=torch.float32) # not_mask【bath,t,h,w】1代表时间列的索引,cumsum累加计算,得到位置idy_embed = not_mask.cumsum(2, dtype=torch.float32) # hx_embed = not_mask.cumsum(3, dtype=torch.float32) # wif self.normalize:eps = 1e-6z_embed = z_embed / (z_embed[:, -1:, :, :] + eps) * self.scaley_embed = y_embed / (y_embed[:, :, -1:, :] + eps) * self.scalex_embed = x_embed / (x_embed[:, :, :, -1:] + eps) * self.scaledim_t = torch.arange(self.num_pos_feats, dtype=torch.float32, device=x.device)dim_t = self.temperature ** (2 * (dim_t // 2) / self.num_pos_feats)dim_t_z = torch.arange((self.num_pos_feats * 2), dtype=torch.float32, device=x.device)dim_t_z = self.temperature ** (2 * (dim_t_z // 2) / (self.num_pos_feats * 2))pos_x = x_embed[:, :, :, :, None] / dim_t # [b,t,h,w]->[b,t,h,w,d] xy编码的d长度是位置编码向量长度的一半pos_y = y_embed[:, :, :, :, None] / dim_tpos_z = z_embed[:, :, :, :, None] / dim_t_z # z用编码向量长度,然后和xy编码相加pos_x = torch.stack((pos_x[:, :, :, :, 0::2].sin(), pos_x[:, :, :, :, 1::2].cos()), dim=5).flatten(4)pos_y = torch.stack((pos_y[:, :, :, :, 0::2].sin(), pos_y[:, :, :, :, 1::2].cos()), dim=5).flatten(4)pos_z = torch.stack((pos_z[:, :, :, :, 0::2].sin(), pos_z[:, :, :, :, 1::2].cos()), dim=5).flatten(4)pos = (torch.cat((pos_y, pos_x), dim=4) + pos_z).permute(0, 1, 4, 2, 3) # b, t, c, h, w(2) query和多帧数据进行atten计算
for i in range(self.num_feature_levels):size_list.append(x[i].shape[-2:])pos.append(self.pe_layer(x[i].view(bs, t, -1, size_list[-1][0], size_list[-1][1]), None).flatten(3))src.append(self.input_proj[i](x[i]).flatten(2) + self.level_embed.weight[i][None, :, None]) #level_embed size [level_num,d],level embed和输入相加# NTxCxHW => NxTxCxHW => (TxHW)xNxC # 多帧数据融合_, c, hw = src[-1].shapepos[-1] = pos[-1].view(bs, t, c, hw).permute(1, 3, 0, 2).flatten(0, 1)# 其中src是Pixel decoder的输出src[-1] = src[-1].view(bs, t, c, hw).permute(1, 3, 0, 2).flatten(0, 1)(3)query和mask计算优化
如代码所示,query和mask 外积计算,从q外积mask得到mask的shape为[b,q,t,h,w],也就是得到(b,q,t)个instance mask,然后query的instance mask和每帧的gt计算loss。
def forward_prediction_heads(self, output, mask_features, attn_mask_target_size):decoder_output = self.decoder_norm(output)decoder_output = decoder_output.transpose(0, 1)outputs_class = self.class_embed(decoder_output)mask_embed = self.mask_embed(decoder_output)# query和mask 外积计算,从q外积mask得到[b,q,t,h,w]个maskoutputs_mask = torch.einsum("bqc,btchw->bqthw", mask_embed, mask_features)b, q, t, _, _ = outputs_mask.shape# NOTE: prediction is of higher-resolution# [B, Q, T, H, W] -> [B, Q, T*H*W] -> [B, h, Q, T*H*W] -> [B*h, Q, T*HW]attn_mask = F.interpolate(outputs_mask.flatten(0, 1), size=attn_mask_target_size, mode="bilinear", align_corners=False).view(b, q, t, attn_mask_target_size[0], attn_mask_target_size[1])# must use bool type# If a BoolTensor is provided, positions with ``True`` are not allowed to attend while ``False`` values will be unchanged.attn_mask = (attn_mask.sigmoid().flatten(2).unsqueeze(1).repeat(1, self.num_heads, 1, 1).flatten(0, 1) < 0.5).bool()attn_mask = attn_mask.detach()return outputs_class, outputs_mask, attn_mask训练时是以instance作为一个基础单元,假设有t帧图像,有n个instance(实例),instance和frame的关系如下图表示:
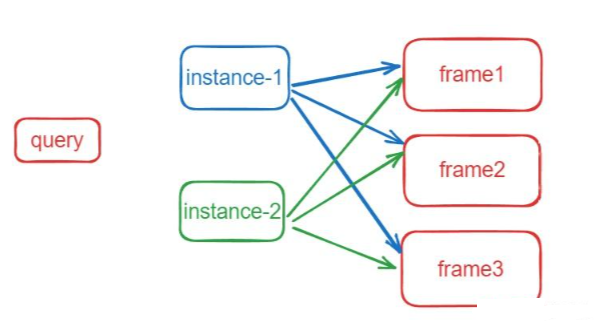
instance在每帧上都可能存在或者不存在。对于每个instance,初始化t个mask,初始化为0,所以instace的shape是[b,n,t,h,w],如果这个instance在某帧上存在,即赋真值mask,用于匹配计算loss;不存在,即为0。
instance在每帧上都是同一个物体(形态可能变化,但是instance id是相同的),所以预测instance的类别时,每个instance只需要预测一个类别即可,所以类别的shape为[b,n]。
3.3 思考
sam(segment anything model)可以通过prompt进行分割,但是缺乏类别信息,可以参考mask2former的思想,mask和类别是独立的,可以添加分类的query,接一个分类的分支,然后在coco等数据集上单独训练这个分支,让sam分割后增加类别信息。
4.参考资料
- mask2former论文
- mask2former代码
附赠
【一】上千篇CVPR、ICCV顶会论文
【二】动手学习深度学习、花书、西瓜书等AI必读书籍
【三】机器学习算法+深度学习神经网络基础教程
【四】OpenCV、Pytorch、YOLO等主流框架算法实战教程
➤ 在助理处自取:

➤ 还可咨询论文辅导❤【毕业论文、SCI、CCF、中文核心、El会议】评职称、研博升学、本升海外学府!
相关文章:
【图像分割】mask2former:通用的图像分割模型详解
最近看到几个项目都用mask2former做图像分割,虽然是1年前的论文,但是其attention的设计还是很有借鉴意义,同时,mask2former参考了detr的query设计,实现了语义和实例分割任务的统一。 1.背景 1.1 detr简介 detr算是第…...
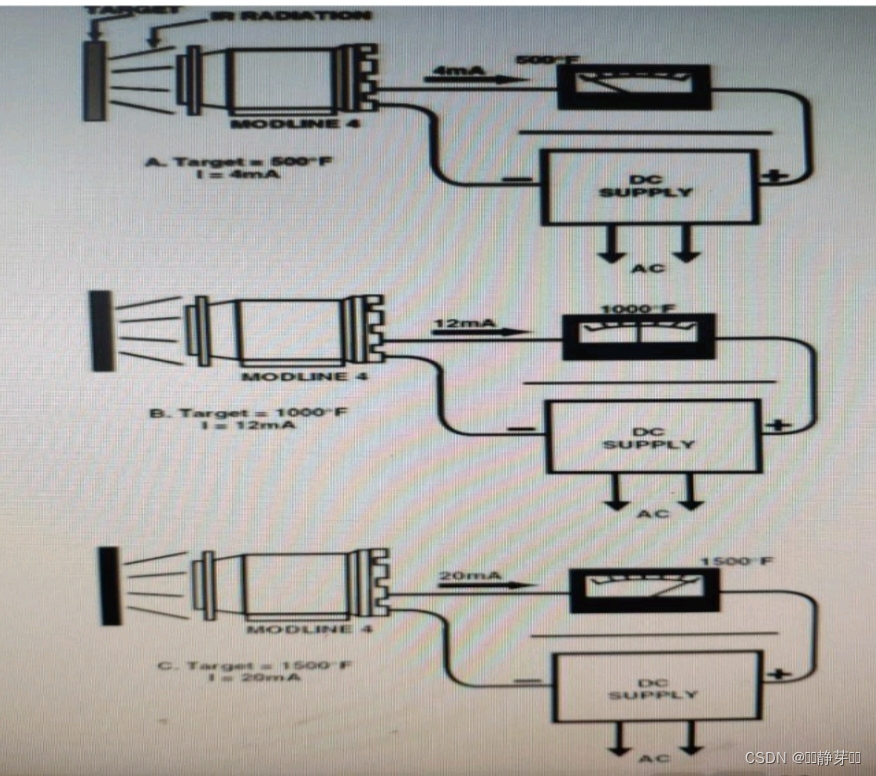
【不锈钢酸退作业区退火炉用高温辐射计快速安装】
项目名称 不锈钢酸退作业区退火炉用高温辐射计快速安装 改造实施项目简介项目提出前状况:不锈钢生产过程中,各种型号的不锈钢带钢在退火工艺中对带钢温度的准确性要求很高,带钢温度的检测直接影响带钢的产品质量,不锈钢带钢温度测量依靠的是高温辐射计,其测量的准确性、稳…...
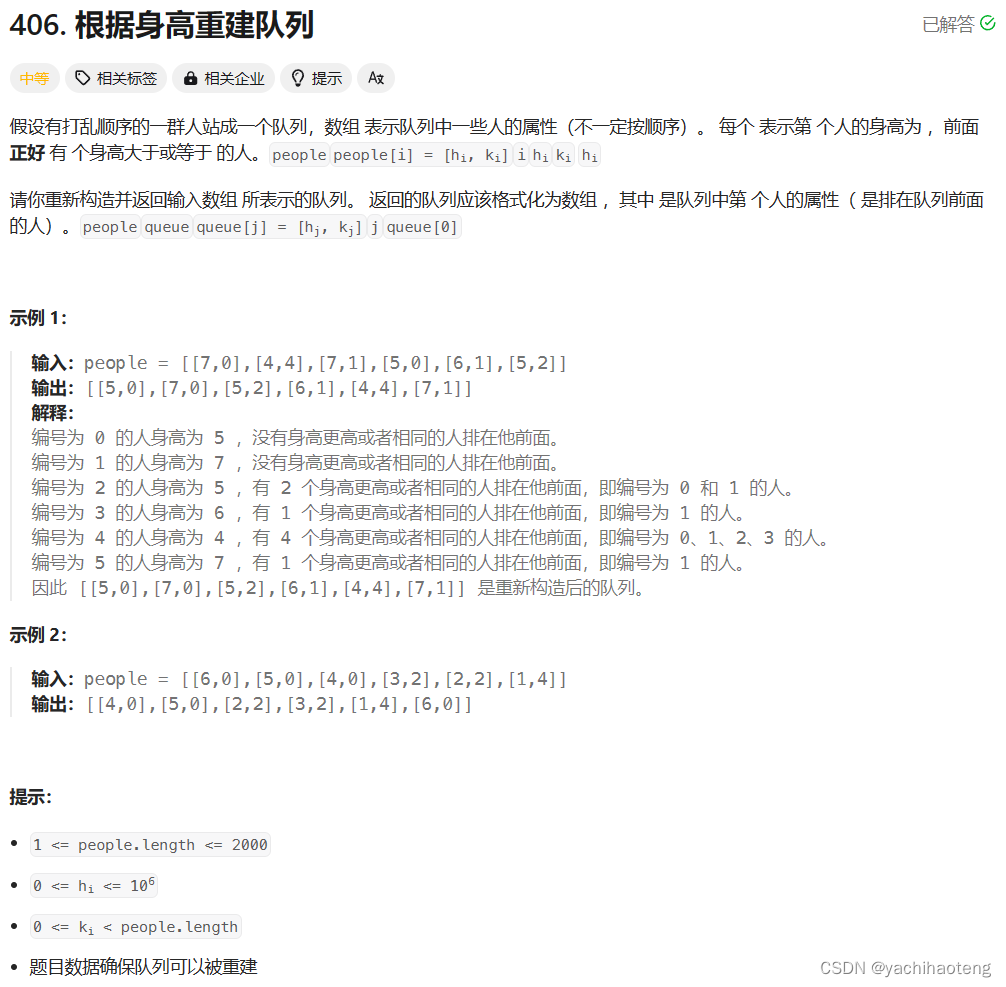
Studying-代码随想录训练营day29| 134. 加油站、135. 分发糖果、860.柠檬水找零、406.根据身高重建队列
第29天,贪心part03,快过半了(ง •_•)ง💪,编程语言:C 目录 134.加油站 135. 分发糖果 860.柠檬水找零 406.根据身高重建队列 134.加油站 文档讲解:代码随想录加油站 视频讲解:手撕加油站…...

Understanding Zero Knowledge Proofs (ZKP)
Bilingual Tutorial: Understanding Zero Knowledge Proofs (ZKP) 双语教程:理解零知识证明(ZKP) Introduction 介绍 English: Zero Knowledge Proofs (ZKP) are a fascinating concept in cryptography where one party (the prover) can…...

微信小程序 DOM 问题
DOM 渲染问题 问题 Dom limit exceeded, please check if theres any mistake youve made.测试页面 1 <template><scroll-view scroll"screen" style"width: 100%;height: 100vh;" :scroll-y"true" :scroll-with-animation"tru…...

可视化作品集(03):旅游景区的应用,美爆啦。
景区可视化通常指的是利用现代科技手段,如地图、虚拟现实(VR)、增强现实(AR)、无人机航拍等技术,将景区的地理信息、景点分布、交通路线、游客服务设施等内容以可视化的方式呈现给游客或者管理者࿰…...

嵌入式实时操作系统:Intewell操作系统与VxWorks操作系统有啥区别
Intewell操作系统和VxWorks操作系统都是工业领域常用的操作系统,它们各有特点和优势。以下是它们之间的一些主要区别: 架构差异: Intewell操作系统采用微内核架构,这使得它具有高实时性、高安全性和强扩展性的特点。微内核架构…...

PCDN技术如何提高内容分发效率?(壹)
PCDN技术提高内容分发效率的操作主要体现在以下几个方面: 利用P2P技术:PCDN以P2P技术为基础,通过挖掘利用边缘网络的海量碎片化闲置资源,实现内容的分发。这种方式可以有效减轻中心服务器的压力,降低内容传输的延迟&a…...

Java 中Json中既有对象又有数组的参数 如何转化成对象
1.示例一:解析一个既包含对象又包含数组的JSON字符串,并将其转换为Java对象 在Java中处理JSON数据,尤其是当JSON结构中既包含对象又包含数组时,常用的库有org.json、Gson和Jackson。这里我将以Gson为例来展示如何解析一个既包含对…...
)
什么是数据挖掘(python)
文章目录 1.什么是数据挖掘2.为什么要做数据挖掘?3数据挖掘有什么用处?3.1分类问题3.2聚类问题3.3回归问题3.4关联问题 4.数据挖掘怎么做?4.1业务理解(Business Understanding)4.2数据理解(Data Understanding&#x…...

【Tomcat】Linux下安装帆软(fineReport)服务器 Tomcat
需求:帆软(fineReport)数据集上传至服务器 工具:XSHELL XFTP 帮助文档 一. 安装帆软服务器Tomcat 提供 Linux X86 和 Linux ARM 两种类型的部署包 ,所以在下载部署钱需要确认系统架构不支持在 32 位操作系统上安装 查…...
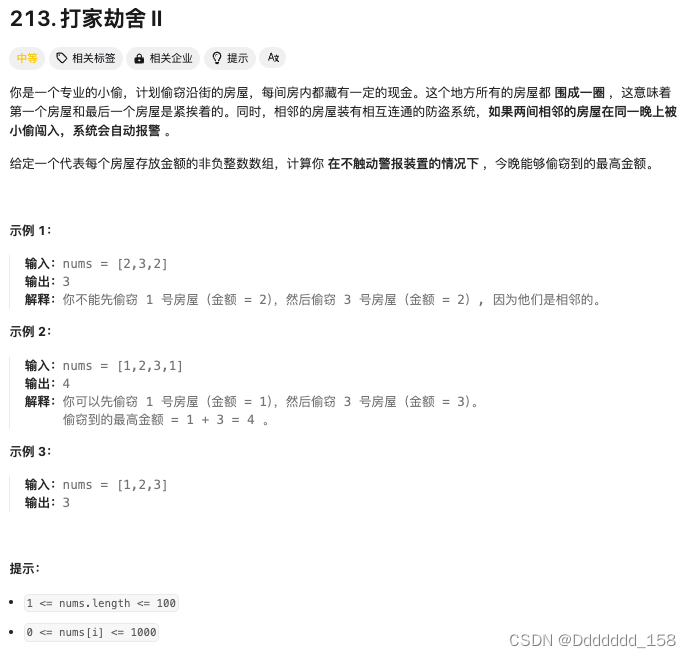
C++ | Leetcode C++题解之第213题打家劫舍II
题目: 题解: class Solution { public:int robRange(vector<int>& nums, int start, int end) {int first nums[start], second max(nums[start], nums[start 1]);for (int i start 2; i < end; i) {int temp second;second max(fi…...

windows系统中快速删除node_modules文件
npx命令方式 npx rimraf node_modules 项目中设置 "scripts": {# 安装依赖"i": "pnpm install",# 检测可更新依赖"npm:check": "npx npm-check-updates",# 删除 node_modules"clean": "npx rimraf node_m…...
返回值为void类型的页面跳转)
Spring MVC数据绑定和响应——页面跳转(一)返回值为void类型的页面跳转
一、返回值为void类型的页面跳转到默认页面 当Spring MVC方法的返回值为void类型,方法执行后会跳转到默认的页面。默认页面的路径由方法映射路径和视图解析器中的前缀、后缀拼接成,拼接格式为“前缀方法映射路径后缀”。如果Spring MVC的配置文件中没有配…...
CSS动画keyframes简单样例
一、代码部分 1.html <!DOCTYPE html> <html lang"en"> <head><meta charset"UTF-8"><meta name"viewport" content"widthdevice-width, initial-scale1.0"><link rel"stylesheet" href…...
LabVIEW风机跑合监控系统
开发了一种基于LabVIEW的风机跑合监控系统,提高风机测试的效率和安全性。系统通过自动控制风机的启停、实时监控电流和功率数据,并具有过流保护功能,有效减少了人工操作和安全隐患,提升了工业设备测试的自动化和智能化水平。 项目…...

sql语句练习注意点
1、时间可以进行排序,也可以用聚合函数对时间求最大值max(时间) 例如下面的例子:取最晚入职的人,那就是将入职时间倒序排序,然后limit 1 表: 场景:查找最晚入职员工的所有信息 se…...

如视“VR+AI”实力闪耀2024世界人工智能大会
7月4日,2024世界人工智能大会暨人工智能全球治理高级别会议(以下简称为“WAIC 2024”)在上海盛大开幕,本届大会由外交部、国家发展和改革委员会、教育部等部门共同主办,围绕“以共商促共享 以善治促善智”主题…...

华为云交付模式和技术支持
华为云交付模式概览 用户由于自身或者企业属性的原因,对于使用云服务的要求也会有所不同。因此,华为云针对于不同用户的不同要求,提供了以下三种交付模式供用户选择。 公有云模式 公有云的核心属性是共享资源服务华为公有云为个人和企业用户…...

RK3568平台(opencv篇)ubuntu18.04上安装opencv环境
一.什么是 OpenCV-Python OpenCV-Python 是一个 Python 绑定库,旨在解决计算机视觉问题。 Python 是一种由 Guido van Rossum 开发的通用编程语言,它很快就变得非常流行,主要是 因为它的简单性和代码可读性。它使程序员能够用更少的代码行…...

Nature|619372人循环代谢性状的遗传分析
尽管复杂疾病的全基因组关联研究(GWAS)通常会分析多达100多万人,但分子特征的研究却滞后了。在这里,研究对爱沙尼亚生物库和英国生物库中多达619,372名个体的249个循环代谢特征进行了GWAS荟萃分析。从8,398个趋同于共享基因和通路…...
)
DeepSeek R1模型本地化部署全链路实践(从Docker镜像构建到API服务高可用上线)
更多请点击: https://codechina.net 第一章:DeepSeek R1模型本地化部署全链路实践(从Docker镜像构建到API服务高可用上线) DeepSeek R1 是一款高性能开源大语言模型,其本地化部署需兼顾推理效率、资源隔离与服务稳定性…...
)
07-大模型智能体开发工程师:提示词工程(Prompt Engineering)
系列文章导航:AI系列文章导航目录-持续更新中 第07课:提示词工程(Prompt Engineering) 📝 本文摘要:本文系统讲解提示词工程的核心认知和方法论,包括六大设计原则(清晰明确、给出示例…...

Legacy iOS Kit深度拆解:揭秘旧款iOS设备重生的技术魔法
Legacy iOS Kit深度拆解:揭秘旧款iOS设备重生的技术魔法 【免费下载链接】Legacy-iOS-Kit An all-in-one tool to restore/downgrade, save SHSH blobs, jailbreak legacy iOS devices, and more 项目地址: https://gitcode.com/gh_mirrors/le/Legacy-iOS-Kit …...
)
【教育科技爆款内容生产核心】:用ChatGPT批量生成带答案解析+难度分级+认知维度标签的脑筋急转弯(附可商用JSON Schema)
更多请点击: https://kaifayun.com 第一章:教育科技爆款内容生产的底层逻辑重构 教育科技领域的“爆款”并非偶然产物,而是内容价值、用户认知路径与算法分发机制三者深度耦合的结果。传统以课程大纲为中心的线性生产范式,正被“…...

如何免费将PPTX转换为HTML?探索纯JavaScript解决方案的完整指南
如何免费将PPTX转换为HTML?探索纯JavaScript解决方案的完整指南 【免费下载链接】PPTX2HTML Convert pptx file to HTML by using pure javascript 项目地址: https://gitcode.com/gh_mirrors/pp/PPTX2HTML 在数字化办公时代,PPTX2HTML作为一款纯…...

有哪些免费好用的在线论文排版工具值得推荐?
毕业季最让人头疼的,从来都不是论文内容创作,而是繁琐的格式排版 —— 标题层级错乱、目录更新失效、参考文献格式不规范、页眉页脚混乱…… 手动调整动辄耗费数小时,还容易反复返工。其实,多款免费好用的在线论文排版工具已能完美…...
)
DeepSeek限流配置全链路解析(从Token Bucket到Sentinel熔断的7层校验机制)
更多请点击: https://intelliparadigm.com 第一章:DeepSeek限流策略配置全景概览 DeepSeek模型服务在高并发场景下需依赖精细化的限流机制保障系统稳定性与资源公平性。限流策略不仅作用于API网关层,还贯穿模型推理服务、缓存中间件及后端调…...

League-Toolkit:英雄联盟玩家的智能自动化助手终极指南
League-Toolkit:英雄联盟玩家的智能自动化助手终极指南 【免费下载链接】League-Toolkit An all-in-one toolkit for LeagueClient. Gathering power 🚀. 项目地址: https://gitcode.com/gh_mirrors/le/League-Toolkit 还在为繁琐的游戏操作而烦恼…...

如何在SketchUp中实现STL文件导入导出:完整3D打印解决方案指南
如何在SketchUp中实现STL文件导入导出:完整3D打印解决方案指南 【免费下载链接】sketchup-stl A SketchUp Ruby Extension that adds STL (STereoLithography) file format import and export. 项目地址: https://gitcode.com/gh_mirrors/sk/sketchup-stl 你…...