RK3568笔记三十六:LED驱动开发(设备树)
若该文为原创文章,转载请注明原文出处。
记录使用设备树编写一个简单的 LED 灯驱动程序
一、编程思路
程序编写的主要内容为添加 LED 灯的设备树节点、在驱动程序中使用 of 函数获取设备节点中的 属性,编写测试应用程序。
• 首先向设备树添加 LED 设备节点。
• 其次编写平台设备驱动框架,主要包驱动入口函数、驱动注销函数、平台设备结构体定义 三部分内容。
• 实现.probe 函数,对 LED 进行设备注册和初始化。
• 实现字符设备操作函数集,这里主要实现.write 操作。
• 编写测试应用程序,对于输入不同的值控制 LED 亮灭
二、编写设备树
RK3568支持设备树,设备树相关知识执行了解。
设备树目录在arch/arm64/boot/dts/rockchip下。
修改 rk3568-atk-evb1-ddr4-v10.dtsi文件,在根目录 /下建立一个节点:
led_test {compatible="yifeng,led_test";status="okay";reg = <0x0 0xFDC20010 0x0 0x08 /* PMU_GRF_GPIO0C_IOMUX_L */ 0x0 0xFDC20090 0x0 0x08 /* PMU_GRF_GPIO0C_DS_0 */ 0x0 0xFDD60004 0x0 0x08 /* GPIO0_SWPORT_DR_H */ 0x0 0xFDD6000C 0x0 0x08 >; /* GPIO0_SWPORT_DDR_H */};reg里的值参考LED驱动开发,比如“0x0 0xFDC20010 0x0 0x08”表示 RK3568 的 PMU_GRF_GPIO0C_IOMUX_L 寄存器,其中寄存器地址为 0xFDC20010,长度为 8 个字节。
修改如下:

设备树修改完成以后在 SDK 顶层目录输入如下命令重新编译一下内核:
# 指定 SDK 的板级配置文件
./build.sh lunch
# 编译内核
./build.sh kernel只需要重新烧写boot.img。

三、编写驱动
led_test.c
#include <linux/types.h>
#include <linux/kernel.h>
#include <linux/delay.h>
#include <linux/ide.h>
#include <linux/init.h>
#include <linux/module.h>
#include <linux/errno.h>
#include <linux/gpio.h>
#include <linux/cdev.h>
#include <linux/device.h>
#include <linux/of.h>
#include <linux/of_address.h>
//#include <asm/mach/map.h>
#include <asm/uaccess.h>
#include <asm/io.h>#define DTSLED_CNT 1 /* 设备号个数 */
#define DTSLED_NAME "led_test" /* 名字 */
#define LEDOFF 0 /* 关灯 */
#define LEDON 1 /* 开灯 *//* 映射后的寄存器虚拟地址指针 */
static void __iomem *PMU_GRF_GPIO0C_IOMUX_L_PI;
static void __iomem *PMU_GRF_GPIO0C_DS_0_PI;
static void __iomem *GPIO0_SWPORT_DR_H_PI;
static void __iomem *GPIO0_SWPORT_DDR_H_PI;/* dtsled设备结构体 */
struct dtsled_dev{dev_t devid; /* 设备号 */struct cdev cdev; /* cdev */struct class *class; /* 类 */struct device *device; /* 设备 */int major; /* 主设备号 */int minor; /* 次设备号 */struct device_node *nd; /* 设备节点 */
};struct dtsled_dev dtsled; /* led设备 *//** @description : LED打开/关闭* @param - sta : LEDON(0) 打开LED,LEDOFF(1) 关闭LED* @return : 无*/
void led_switch(u8 sta)
{u32 val = 0;if(sta == LEDON) {val = readl(GPIO0_SWPORT_DR_H_PI);val &= ~(0X1 << 0); /* bit0 清零*/val |= ((0X1 << 16) | (0X1 << 0)); /* bit16 置1,允许写bit0,bit0,高电平*/writel(val, GPIO0_SWPORT_DR_H_PI);}else if(sta == LEDOFF) { val = readl(GPIO0_SWPORT_DR_H_PI);val &= ~(0X1 << 0); /* bit0 清零*/val |= ((0X1 << 16) | (0X0 << 0)); /* bit16 置1,允许写bit0,bit0,低电平 */writel(val, GPIO0_SWPORT_DR_H_PI);}
}/** @description : 取消映射* @return : 无*/
void led_unmap(void)
{/* 取消映射 */iounmap(PMU_GRF_GPIO0C_IOMUX_L_PI);iounmap(PMU_GRF_GPIO0C_DS_0_PI);iounmap(GPIO0_SWPORT_DR_H_PI);iounmap(GPIO0_SWPORT_DDR_H_PI);
}/** @description : 打开设备* @param - inode : 传递给驱动的inode* @param - filp : 设备文件,file结构体有个叫做private_data的成员变量* 一般在open的时候将private_data指向设备结构体。* @return : 0 成功;其他 失败*/
static int led_open(struct inode *inode, struct file *filp)
{filp->private_data = &dtsled; /* 设置私有数据 */return 0;
}/** @description : 从设备读取数据 * @param - filp : 要打开的设备文件(文件描述符)* @param - buf : 返回给用户空间的数据缓冲区* @param - cnt : 要读取的数据长度* @param - offt : 相对于文件首地址的偏移* @return : 读取的字节数,如果为负值,表示读取失败*/
static ssize_t led_read(struct file *filp, char __user *buf, size_t cnt, loff_t *offt)
{return 0;
}/** @description : 向设备写数据 * @param - filp : 设备文件,表示打开的文件描述符* @param - buf : 要写给设备写入的数据* @param - cnt : 要写入的数据长度* @param - offt : 相对于文件首地址的偏移* @return : 写入的字节数,如果为负值,表示写入失败*/
static ssize_t led_write(struct file *filp, const char __user *buf, size_t cnt, loff_t *offt)
{int retvalue;unsigned char databuf[1];unsigned char ledstat;retvalue = copy_from_user(databuf, buf, cnt);if(retvalue < 0) {printk("kernel write failed!\r\n");return -EFAULT;}ledstat = databuf[0]; /* 获取状态值 */if(ledstat == LEDON) { led_switch(LEDON); /* 打开LED灯 */} else if(ledstat == LEDOFF) {led_switch(LEDOFF); /* 关闭LED灯 */}return 0;
}/** @description : 关闭/释放设备* @param - filp : 要关闭的设备文件(文件描述符)* @return : 0 成功;其他 失败*/
static int led_release(struct inode *inode, struct file *filp)
{return 0;
}/* 设备操作函数 */
static struct file_operations dtsled_fops = {.owner = THIS_MODULE,.open = led_open,.read = led_read,.write = led_write,.release = led_release,
};/** @description : 驱动出口函数* @param : 无* @return : 无*/
static int __init led_init(void)
{u32 val = 0;int ret;u32 regdata[16];const char *str;struct property *proper;/* 获取设备树中的属性数据 *//* 1、获取设备节点:led_test */dtsled.nd = of_find_node_by_path("/led_test");if(dtsled.nd == NULL) {printk("led_test node not find!\r\n");goto fail_find_node;} else {printk("led_test node find!\r\n");}/* 2、获取compatible属性内容 */proper = of_find_property(dtsled.nd, "compatible", NULL);if(proper == NULL) {printk("compatible property find failed\r\n");} else {printk("compatible = %s\r\n", (char*)proper->value);}/* 3、获取status属性内容 */ret = of_property_read_string(dtsled.nd, "status", &str);if(ret < 0){printk("status read failed!\r\n");} else {printk("status = %s\r\n",str);}/* 4、获取reg属性内容 */ret = of_property_read_u32_array(dtsled.nd, "reg", regdata, 16);if(ret < 0) {printk("reg property read failed!\r\n");} else {u8 i = 0;printk("reg data:\r\n");for(i = 0; i < 16; i++)printk("%#X ", regdata[i]);printk("\r\n");}/* 初始化LED *//* 1、寄存器地址映射 */PMU_GRF_GPIO0C_IOMUX_L_PI = of_iomap(dtsled.nd, 0);PMU_GRF_GPIO0C_DS_0_PI = of_iomap(dtsled.nd, 1);GPIO0_SWPORT_DR_H_PI = of_iomap(dtsled.nd, 2);GPIO0_SWPORT_DDR_H_PI = of_iomap(dtsled.nd, 3);/* 2、设置GPIO0_C0为GPIO功能。*/val = readl(PMU_GRF_GPIO0C_IOMUX_L_PI);val &= ~(0X7 << 0); /* bit2:0,清零 */val |= ((0X7 << 16) | (0X0 << 0)); /* bit18:16 置1,允许写bit2:0,bit2:0:0,用作GPIO0_C0 */writel(val, PMU_GRF_GPIO0C_IOMUX_L_PI);/* 3、设置GPIO0_C0驱动能力为level5 */val = readl(PMU_GRF_GPIO0C_DS_0_PI);val &= ~(0X3F << 0); /* bit5:0清零*/val |= ((0X3F << 16) | (0X3F << 0)); /* bit21:16 置1,允许写bit5:0,bit5:0:0,用作GPIO0_C0 */writel(val, PMU_GRF_GPIO0C_DS_0_PI);/* 4、设置GPIO0_C0为输出 */val = readl(GPIO0_SWPORT_DDR_H_PI);val &= ~(0X1 << 0); /* bit0 清零*/val |= ((0X1 << 16) | (0X1 << 0)); /* bit16 置1,允许写bit0,bit0,高电平 */writel(val, GPIO0_SWPORT_DDR_H_PI);/* 5、设置GPIO0_C0为低电平,关闭LED灯。*/val = readl(GPIO0_SWPORT_DR_H_PI);val &= ~(0X1 << 0); /* bit0 清零*/val |= ((0X1 << 16) | (0X0 << 0)); /* bit16 置1,允许写bit0,bit0,低电平 */writel(val, GPIO0_SWPORT_DR_H_PI);/* 注册字符设备驱动 *//* 1、创建设备号 */if (dtsled.major) { /* 定义了设备号 */dtsled.devid = MKDEV(dtsled.major, 0);ret = register_chrdev_region(dtsled.devid, DTSLED_CNT, DTSLED_NAME);if(ret < 0) {pr_err("cannot register %s char driver [ret=%d]\n",DTSLED_NAME, DTSLED_CNT);goto fail_devid;}} else { /* 没有定义设备号 */ret = alloc_chrdev_region(&dtsled.devid, 0, DTSLED_CNT, DTSLED_NAME); /* 申请设备号 */if(ret < 0) {pr_err("%s Couldn't alloc_chrdev_region, ret=%d\r\n", DTSLED_NAME, ret);goto fail_devid;}dtsled.major = MAJOR(dtsled.devid); /* 获取分配号的主设备号 */dtsled.minor = MINOR(dtsled.devid); /* 获取分配号的次设备号 */}printk("dtsled major=%d,minor=%d\r\n",dtsled.major, dtsled.minor); /* 2、初始化cdev */dtsled.cdev.owner = THIS_MODULE;cdev_init(&dtsled.cdev, &dtsled_fops);/* 3、添加一个cdev */ret = cdev_add(&dtsled.cdev, dtsled.devid, DTSLED_CNT);if(ret < 0)goto del_unregister;/* 4、创建类 */dtsled.class = class_create(THIS_MODULE, DTSLED_NAME);if (IS_ERR(dtsled.class)) {goto del_cdev;}/* 5、创建设备 */dtsled.device = device_create(dtsled.class, NULL, dtsled.devid, NULL, DTSLED_NAME);if (IS_ERR(dtsled.device)) {goto destroy_class;}return 0;destroy_class:class_destroy(dtsled.class);
del_cdev:cdev_del(&dtsled.cdev);
del_unregister:unregister_chrdev_region(dtsled.devid, DTSLED_CNT);
fail_devid:led_unmap();
fail_find_node:return -EIO;
}/** @description : 驱动出口函数* @param : 无* @return : 无*/
static void __exit led_exit(void)
{/* 取消映射 */led_unmap();/* 注销字符设备驱动 */cdev_del(&dtsled.cdev);/* 删除cdev */unregister_chrdev_region(dtsled.devid, DTSLED_CNT); /* 注销设备号 */device_destroy(dtsled.class, dtsled.devid);class_destroy(dtsled.class);
}module_init(led_init);
module_exit(led_exit);
MODULE_LICENSE("GPL");
MODULE_AUTHOR("ALIENTEK");
MODULE_INFO(intree, "Y");makefile
KERNELDIR := /home/alientek/rk3568_linux_sdk/kernel
ARCH=arm64
CROSS_COMPILE=/opt/atk-dlrk356x-toolchain/usr/bin/aarch64-buildroot-linux-gnu-export ARCH CROSS_COMPILECURRENT_PATH := $(shell pwd)
obj-m := led_test.obuild: kernel_moduleskernel_modules:$(MAKE) -C $(KERNELDIR) M=$(CURRENT_PATH) modules
clean:$(MAKE) -C $(KERNELDIR) M=$(CURRENT_PATH) clean

四、编写应用
test_app.c
#include "stdio.h"
#include "unistd.h"
#include "sys/types.h"
#include "sys/stat.h"
#include "fcntl.h"
#include "stdlib.h"
#include "string.h"#define LEDOFF 0
#define LEDON 1/** @description : main主程序* @param - argc : argv数组元素个数* @param - argv : 具体参数* @return : 0 成功;其他 失败*/
int main(int argc, char *argv[])
{int fd, retvalue;char *filename;unsigned char databuf[1];if(argc != 3){printf("Error Usage!\r\n");return -1;}filename = argv[1];/* 打开led驱动 */fd = open(filename, O_RDWR);if(fd < 0){printf("file %s open failed!\r\n", argv[1]);return -1;}databuf[0] = atoi(argv[2]); /* 要执行的操作:打开或关闭 *//* 向/dev/led文件写入数据 */retvalue = write(fd, databuf, sizeof(databuf));if(retvalue < 0){printf("LED Control Failed!\r\n");close(fd);return -1;}retvalue = close(fd); /* 关闭文件 */if(retvalue < 0){printf("file %s close failed!\r\n", argv[1]);return -1;}return 0;
}编译
/opt/atk-dlrk356x-toolchain/bin/aarch64-buildroot-linux-gnu-gcc ledApp.c -o ledApp五、测试
1、关闭 LED 的心跳灯
echo none > /sys/class/leds/work/trigger2、加载和卸载驱动模块
depmod //第一次加载驱动的时候需要运行此命令
modprobe dtsled //加载驱动或
insmod led_test.ko卸载
rmmod led_test3、测试
./ledApp /dev/led_test 1 //打开 LED 灯./ledApp /dev/led_test 0 // 关闭 LED 灯如有侵权,或需要完整代码,请及时联系博主。
相关文章:

RK3568笔记三十六:LED驱动开发(设备树)
若该文为原创文章,转载请注明原文出处。 记录使用设备树编写一个简单的 LED 灯驱动程序 一、编程思路 程序编写的主要内容为添加 LED 灯的设备树节点、在驱动程序中使用 of 函数获取设备节点中的 属性,编写测试应用程序。 • 首先向设备树添加 LED 设备…...
AC修炼计划(AtCoder Regular Contest 180) A~C
A - ABA and BAB A - ABA and BAB (atcoder.jp) 这道题我一开始想复杂了,一直在想怎么dp,没注意到其实是个很简单的规律题。 我们可以发现我们住需要统计一下类似ABABA这样不同字母相互交替的所有子段的长度,而每个字段的的情况有ÿ…...

云计算练习题
第一题:每周日晚上11点59分需要将/data目录打包压缩到/mnt目录下并以时间命名 #crontab -e 59 23 * * 7 /bin/tar czvf /mnt/date %F-data.tar.gz /data 59 23 * * 7 /bin/tar czvf /mnt/date %T.tar.gz /data 第二题:查找出系统中/application目录下所有…...
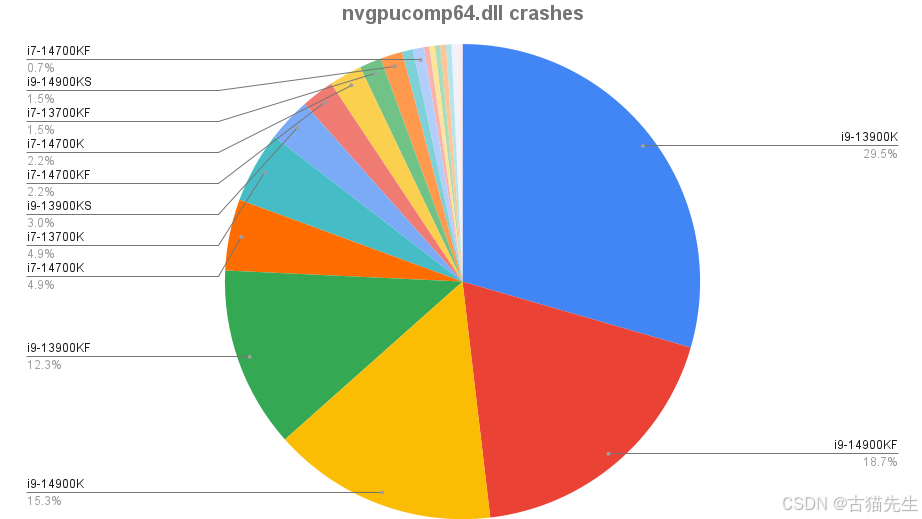
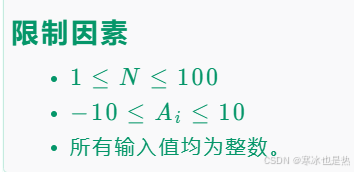
《战甲神兵》开发者报告:游戏崩溃问题80%发生在Intel可超频酷睿i9处理器上——酷睿i7 K系列CPU也表现出高崩溃率
在Intel持续面临第13代和第14代CPU崩溃问题的背景下,近日,《战甲神兵》(Warframe)的开发者们于7月9日披露了游戏崩溃的统计数据,并描述了诊断该问题的过程。根据开发团队的说法,一名未进行超频且使用全新PC的员工,即便…...
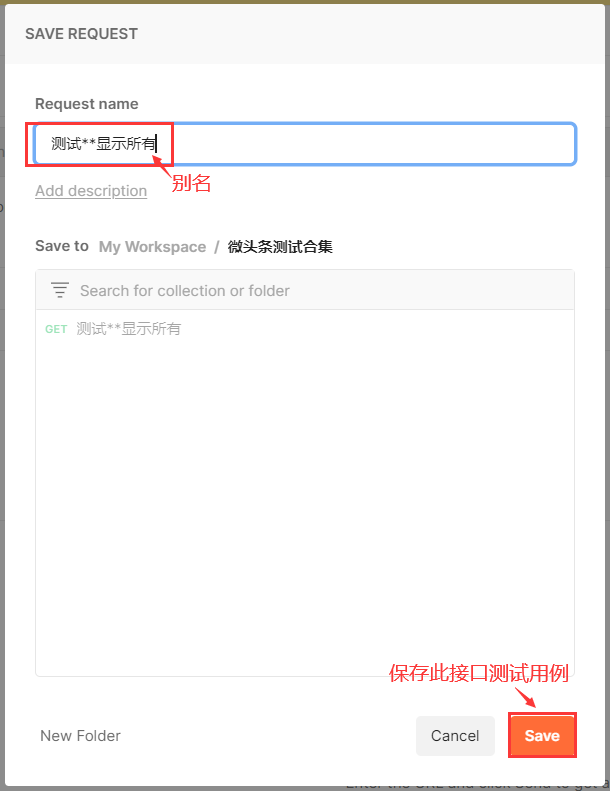
Postman下载及使用说明
Postman使用说明 Postman是什么? Postman是一款接口对接工具【接口测试工具】 接口(前端接口)是什么? 前端发送的请求普遍被称为接口 通常有网页的uri参数格式json/key-value请求方式post/get响应请求的格式json 接…...

什么是im即时通讯?WorkPlus im即时通讯私有化部署安全可控
IM即时通讯是Instant Messaging的缩写,指的是一种实时的、即时的电子信息交流方式,也被称为即时通讯。它通过互联网和移动通信网络,使用户能够及时交换文本消息、语音通话、视频通话、文件共享等信息。而WorkPlus im即时通讯私有化部署则提供…...

hnust 1794: 机器翻译
hnust 1794: 机器翻译 题目描述 小晨的电脑上安装了一个机器翻译软件,他经常用这个软件来翻译英语文章。 这个翻译软件的原理很简单,它只是从头到尾,依次将每个英文单词用对应的中文含义来替换。对于每个英文单词,软件会先在内存…...
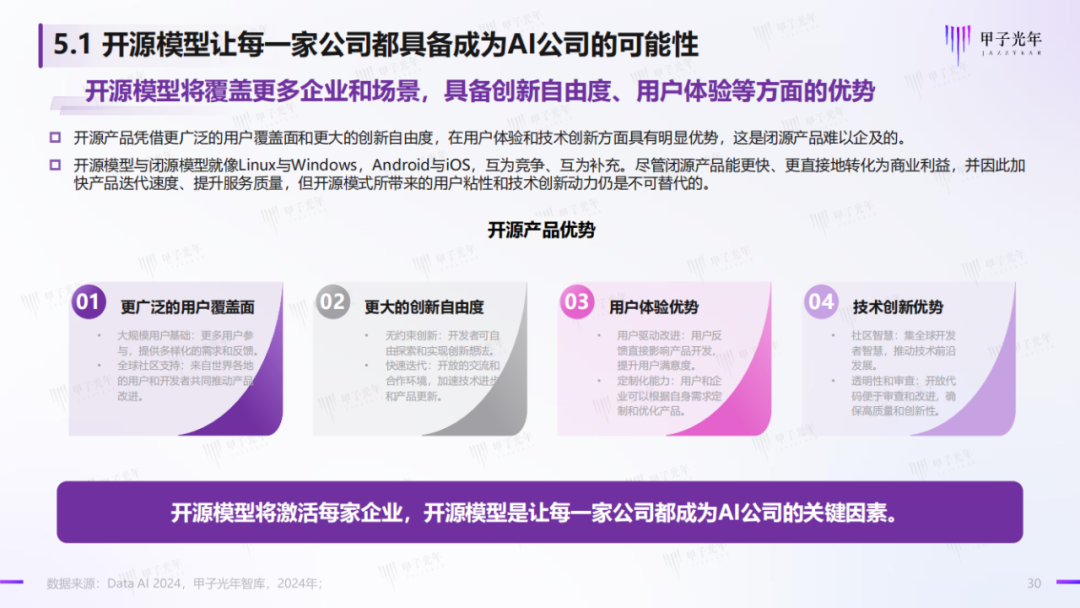
AI人工智能开源大模型生态体系分析
人工智能开源大模型生态体系研究 "人工智能开源大模型生态体系研究报告v1.0"揭示,AI(A)的飞速发展依赖于三大核心:数据、算法和算力。这一理念已得到业界广泛认同,三者兼备才能推动AI的壮大发展。随着AI大模型的扩大与普及…...

ArkTS学习笔记_封装复用之@Styles装饰器
ArkTS学习笔记_封装复用之Styles装饰器 背景: 在开发中,如果每个组件的样式都需要单独设置,就会出现大量代码在进行重复样式设置,虽然可以复制粘贴,但为了代码简洁性和后续方便维护,给出的思路是ÿ…...

根据vue学习react
react的函数式组件与vue2是很像的 一、基础类似点 1、组件下拥有一个根节点,vue2是template,react是幽灵标签<> 2、vue2是{{}}以及v-model,react的绑定是{} 3、vue2编译html是v-html,react是{},并且react的jsx中…...
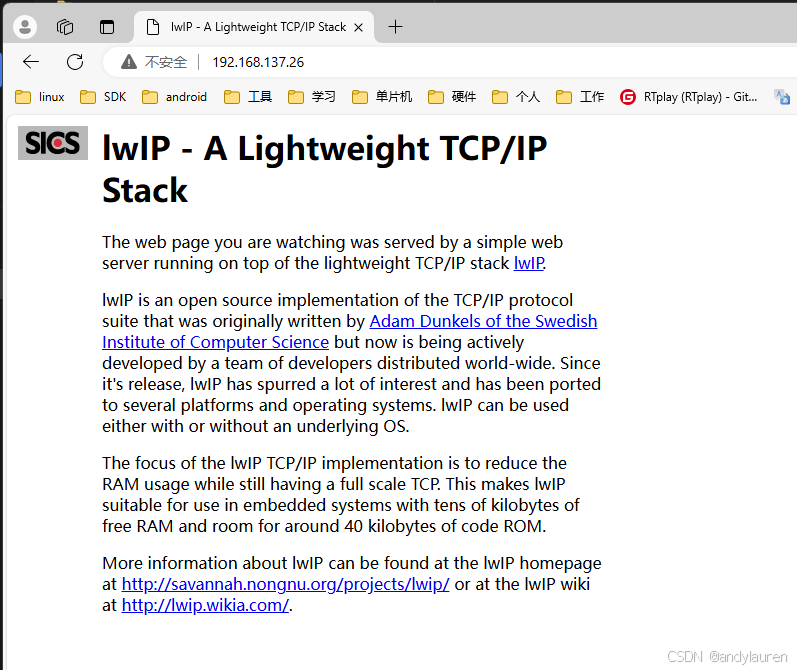
Hi3861 OpenHarmony嵌入式应用入门--HTTPD
httpd 是 Apache HTTP Server 的守护进程名称,Apache HTTP Server 是一种广泛使用的开源网页服务器软件。 本项目是从LwIP中抽取的HTTP服务器代码; Hi3861 SDK中已经包含了一份预编译的lwip,但没有开启HTTP服务器功能(静态库无法…...
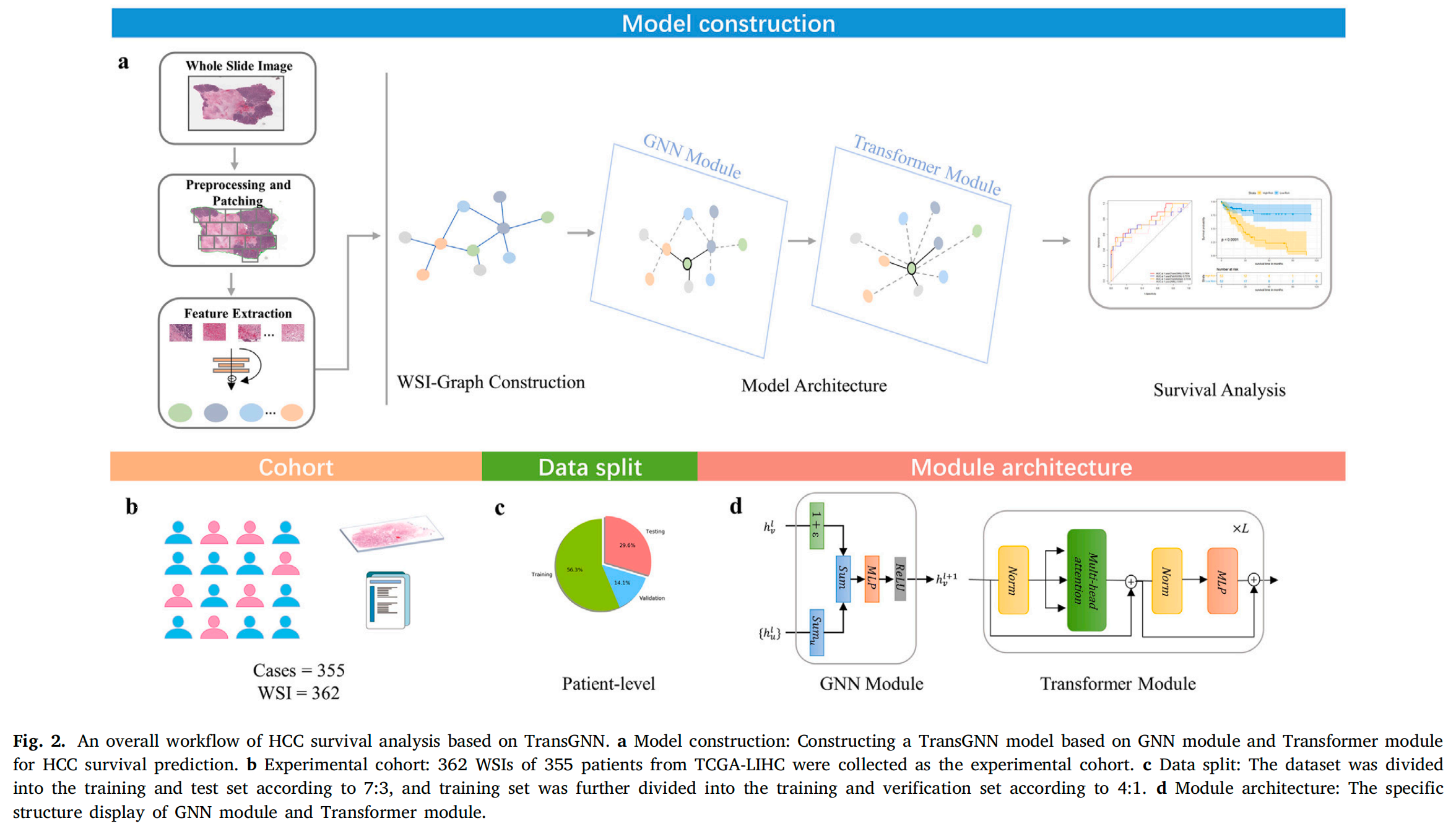
MICS2024|少样本学习、多模态技术以及大语言模型在医学图像处理领域的研究进展|24-07-14
小罗碎碎念 本期推文主题 今天的会议很多主题都集中在大模型、多模态这两个方面,很明显,这两个方向都是目前的研究热点。 所以,我这一期推文会先简单的分析一下秦文健(中科院)和史淼晶(同济大学)…...
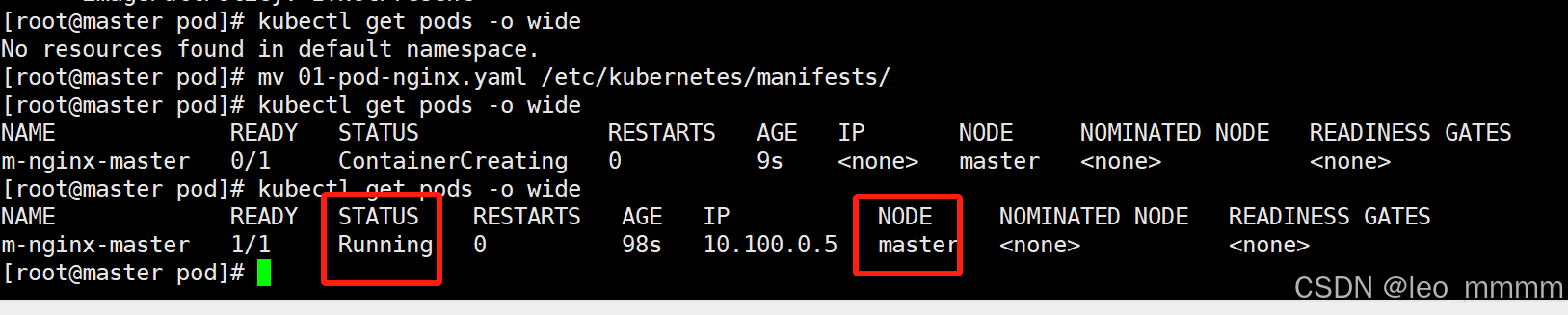
ConfigMap-secrets-静态pod
一.ConfigMap 1.概述 ConfigMap资源,简称CM资源,它生成的键值对数据,存储在ETCD数据库中 应用场景:主要是对应用程序的配置 pod通过env变量引入ConfigMap,或者通过数据卷挂载volume的方式引入ConfigMap资源 官方解释…...

SQL Error: 1406, SQLState: 22001
SQL错误代码1406和SQLState 22001通常表示“列数据过长”错误。这意味着尝试插入或更新列中的值,但该值的长度超过了该列允许的最大长度。 解决此问题的几个步骤: 检查列长度: 确定引起错误的列。检查数据库架构中该列允许的最大长度。 验证…...
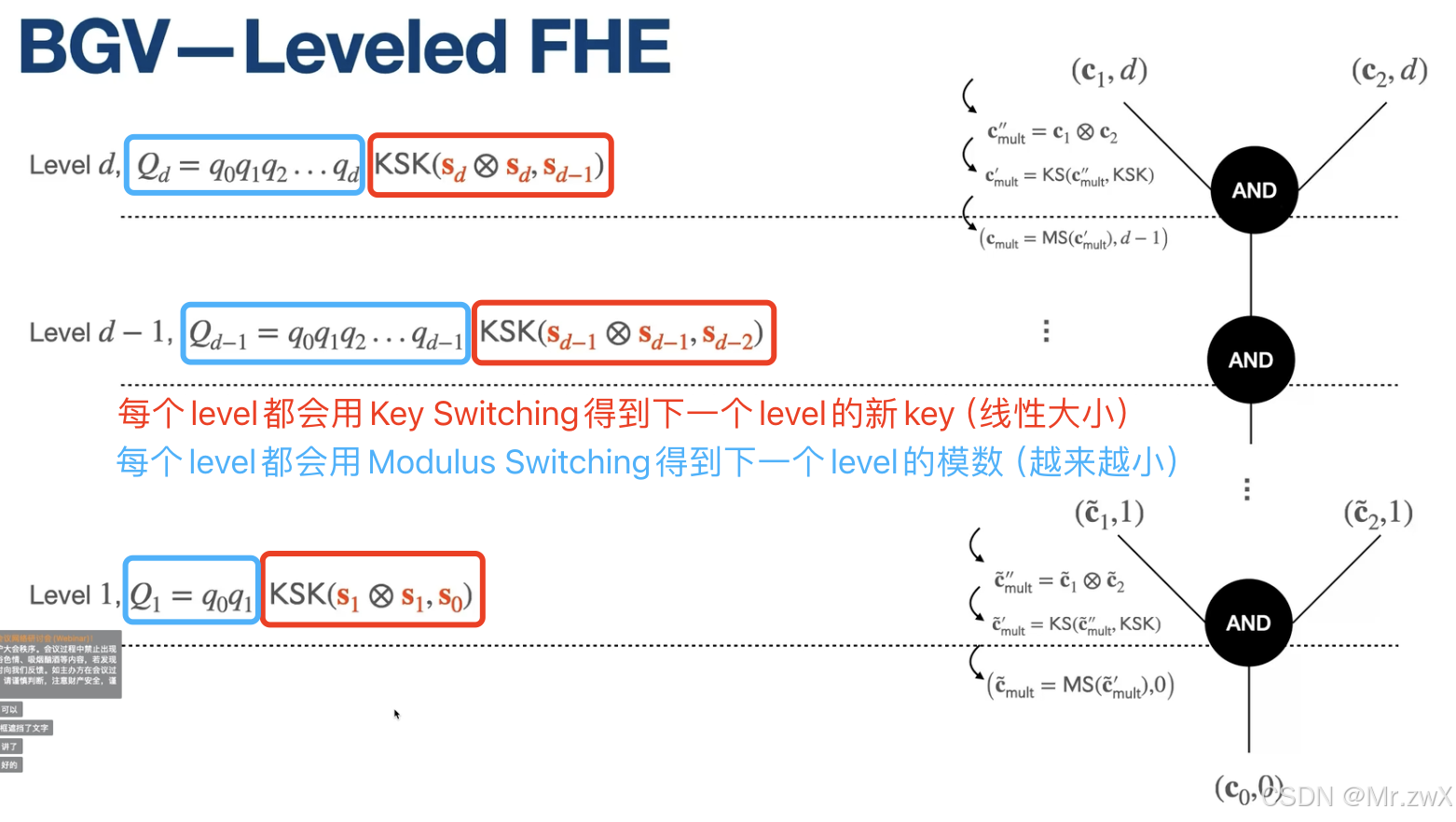
【密码学基础】基于LWE(Learning with Errors)的全同态加密方案
学习资源: 全同态加密I:理论与基础(上海交通大学 郁昱老师) 全同态加密II:全同态加密的理论与构造(Xiang Xie老师) 现在第二代(如BGV和BFV)和第三代全同态加密方案都是基…...

Linux - 基础开发工具(yum、vim、gcc、g++、make/Makefile、git)
目录 Linux软件包管理器 - yum Linux下安装软件的方式 认识yum 查找软件包 安装软件 如何实现本地机器和云服务器之间的文件互传 卸载软件 Linux编辑器 - vim vim的基本概念 vim下各模式的切换 vim命令模式各命令汇总 vim底行模式各命令汇总 vim的简单配置 Linux编译器 - gc…...

网络安全法律框架更新:最新合规要求与企业应对策略
网络安全法律框架的最新更新 近期,中国的网络安全法律框架经历了重要的更新。2022年,《网络安全法》迎来了首次修改,这一修订主要是为了与《数据安全法》和《个人信息保护法》等新实施的法律进行衔接协调,完善法律责任制度&#x…...

数仓工具—Hive语法之正则表达式函数
正则表达式函数 之前我们介绍过like rlike regexp 这些关键字,都是和匹配有关的,今天我们介绍一下hive 的REGEXP_REPLACE 和REGEXP_EXTRACT 函数,背景是使用Hive正则表达式函数提取数字 在我的其他文章中,我们已经看到了如何使用Hive正则表达式从字符串中提取日期值。正则…...

WKCTF 2024 easy_heap
很经典的house of orange unsortedbin attack FSOP 变量覆盖 不能 free,那首先想到就是 house of orange泄露Libc基址,然后unsortedbin attack。 但是只能show(8),就不能用largebin的套路来泄露堆地址了,那怎么办呢? …...

SQL 多变关联使用子查询去重
不去重状态 select a.*,b.recon_amt from free_settlement_first aleft join free_settlement_second b on a.settlement_first_id b.settlement_first_id 有2条数据出现了重复 使用子查询去重 select a.*,b.recon_amt from free_settlement_first aleft join free_settlem…...

微生物代谢建模与优化:从GEMs构建到工业应用
1. 微生物代谢建模与优化的协同设计方法在工业生物技术领域,微生物代谢建模已成为优化生物转化过程的核心工具。通过构建基因组尺度代谢模型(GEMs),研究人员能够系统分析微生物细胞内数百至数千个酶催化反应的相互作用网络。以丁酸…...
的协同控制与转矩提升仿真(带 MATLAB 脚本(直接运行)))
学 Simulink—— 双定子永磁同步电机(DS‑PMSM)的协同控制与转矩提升仿真(带 MATLAB 脚本(直接运行))
目录 手把手教你学 Simulink—— 双定子永磁同步电机(DS‑PMSM)的协同控制与转矩提升仿真 🔥 前言:为什么做双定子 PMSM? 一、DS‑PMSM 结构与工作原理 1.1 基本结构 1.2 数学模型(dq 轴,含互感耦合) 二、协同控制策略:主从 FOC + 转矩叠加 2.1 控制架构(5 大…...

211本科985硕拿下淘天AI二面!全程无代码,这面试题火了!
本文分享了作者在淘天AI应用开发二面中的面试经历,全程不到60分钟,没有手撕代码,也没有问常规Java八股。面试主要围绕自我介绍、AI相关问题、工程与安全问题、项目提问以及反问环节展开。AI相关问题涉及对AI的看法、常用AI工具等;…...

告别手慢无!自动化抢票系统让你轻松搞定热门演出门票
告别手慢无!自动化抢票系统让你轻松搞定热门演出门票 【免费下载链接】ticket-purchase 大麦自动抢票,支持人员、城市、日期场次、价格选择 项目地址: https://gitcode.com/GitHub_Trending/ti/ticket-purchase 还在为抢不到心仪的演唱会门票而烦…...

proj-agones:知识点:helm
helm install之后的log be like:(base) savilahaobogon ~ % helm install prometheus prometheus-community/kube-prometheus-stack -n monitoring --create-namespace NAME: prometheus LAST DEPLOYED: Wed May 20 14:54:39 2026 NAMESPACE: monitoring STATUS: de…...

从实战出发:聊聊Serial口静态路由在老旧网络设备迁移中的那些事儿
从实战出发:聊聊Serial口静态路由在老旧网络设备迁移中的那些事儿 第一次在机房里见到那台积满灰尘的Cisco 1841时,我差点以为这是个博物馆展品。但客户坚持说这台服役超过15年的老伙计承载着他们最重要的生产线控制数据,任何闪失都可能造成六…...

面部美化 API 集成指南
面部美化 API 集成指南 在本教程中,我们将介绍如何集成面部美化 API。该 API 能够准确识别面部特征,并通过用户上传的面部图像实现皮肤平滑、皮肤美白和去痘等美化功能(每张图像最多可处理五张面孔)。 环境准备 在使用 API 之前…...

各种“地”—— 各种“GND”
GND,指的是电线接地端的简写。代表地线或0线。电路图上和电路板上的GND(Ground)代表地线或0线.GND就是公共端的意思,也可以说是地,但这个地并不是真正意义上的地。是出于应用而假设的一个地,对于电源来说,它就是一个电…...

macOS虚拟打印机:一键文档转PDF的高效解决方案
macOS虚拟打印机:一键文档转PDF的高效解决方案 【免费下载链接】RWTS-PDFwriter An OSX print to pdf-file printer driver 项目地址: https://gitcode.com/gh_mirrors/rw/RWTS-PDFwriter 在数字化办公环境中,将各类文档快速转换为PDF格式是日常工…...

Adobe-GenP 3.0:为什么这款免费激活工具能让Adobe全家桶瞬间解锁?
Adobe-GenP 3.0:为什么这款免费激活工具能让Adobe全家桶瞬间解锁? 【免费下载链接】Adobe-GenP Adobe CC 2019/2020/2021/2022/2023 GenP Universal Patch 3.0 项目地址: https://gitcode.com/gh_mirrors/ad/Adobe-GenP 你是否曾经因为Adobe Crea…...