Matlab实现粒子群算法
粒子群算法(Particle Swarm Optimization,PSO)是一种群体智能算法,通过模拟自然界中鸟群、鱼群等生物群体的行为,来解决优化问题。
在PSO算法中,每个个体被称为粒子,每个粒子的位置表示解空间中的一个解,每个粒子的速度表示其在搜索空间中的方向和速度。算法通过不断地更新粒子的位置和速度,来寻找最优解。
下面我们来介绍如何使用Matlab实现粒子群算法。
文章目录
- 1. 初始化粒子群
- 2. 计算适应度函数
- 3. 更新粒子的速度和位置
- 4. 迭代更新
1. 初始化粒子群
首先,我们需要定义粒子群的初始状态。在PSO算法中,每个粒子的位置和速度都是随机生成的,因此我们需要定义粒子群的数量、每个粒子的维度、位置和速度的范围等参数。
例如,我们设置粒子群数量为50,每个粒子的维度为2,位置和速度的范围为[-5,5],则可以使用如下代码进行初始化:
n = 50; % 粒子群数量
d = 2; % 粒子维度
x = -5 + 10 * rand(n,d); % 粒子位置
v = -1 + 2 * rand(n,d); % 粒子速度
2. 计算适应度函数
在PSO算法中,适应度函数是用来评估每个粒子的解的好坏的。因此,我们需要定义适应度函数。
例如,我们定义适应度函数为f(x) = x1^2 + x2^2,则可以使用如下代码进行计算:
f = sum(x.^2,2);
3. 更新粒子的速度和位置
在PSO算法中,每个粒子的速度和位置都会不断地被更新。更新的公式如下:
v = w * v + c1 * rand(n,d) .* (p - x) + c2 * rand(n,d) .* (g - x);
x = x + v;
其中,w是惯性因子,c1和c2是加速常数,p表示每个粒子历史上最好的位置,g表示整个粒子群历史上最好的位置。
例如,我们设置惯性因子为0.8,加速常数为2,粒子历史上最好的位置为p,整个粒子群历史上最好的位置为g,则可以使用如下代码进行更新:
w = 0.8; % 惯性因子
c1 = 2; % 加速常数1
c2 = 2; % 加速常数2
p = x; % 粒子历史上最好的位置
g = x(find(f == min(f),1),:); % 整个粒子群历史上最好的位置
v = w * v + c1 * rand(n,d) .* (p - x) + c2 * rand(n,d) .* (g - x);
x = x + v;
4. 迭代更新
最后,我们需要进行迭代更新,直到达到最大迭代次数或者满足停止条件为止。
例如,我们设置最大迭代次数为100,停止条件为适应度函数小于1e-6,则可以使用如下代码进行迭代更新:
max_iter = 100; % 最大迭代次数
tol = 1e-6; % 停止条件
for i = 1:max_iter
f = sum(x.^2,2); % 计算适应度函数
p(f < sum(p.^2,2),:) = x(f < sum(p.^2,2),:); % 更新粒子历史最好位置
g = x(find(f == min(f),1),:); % 更新整个粒子群历史最好位置
if min(f) < tol % 满足停止条件
break;
end
v = w * v + c1 * rand(n,d) .* (p - x) + c2 * rand(n,d) .* (g - x); % 更新速度
x = x + v; % 更新位置
end
至此,我们已经完成了Matlab实现粒子群算法的过程。可以通过改变参数,来求解不同的优化问题。
相关文章:

Matlab实现粒子群算法
粒子群算法(Particle Swarm Optimization,PSO)是一种群体智能算法,通过模拟自然界中鸟群、鱼群等生物群体的行为,来解决优化问题。 在PSO算法中,每个个体被称为粒子,每个粒子的位置表示解空间中…...

tailwindcss 写原生html
需要注意:html文件中引入的是output.css input.css写那三行预留的就可以了打包的时候只要打包html output.css img文件夹句ok,其他都不用原理是运行时生产output.css文件,直接【注意!注意!注意!class"…...
Java开发一年不到,来面试居然敢开口要20K,面完连8K都不想给~
前言 我的好朋友兼大学同学老伍家庭经济情况不错,毕业之后没两年自己存了点钱加上家里的支持,自己在杭州开了一家网络公司。由于公司不是很大所以公司大部分的开发人员都是自己面试的,近期公司发展的不错,打算扩招也面试了不少人…...
LeetCode题解 20(17,79) 电话号码的字母组合,单词搜索<回溯>
文章目录电话号码的字母组合(17)代码解答单词搜索(79)代码解答电话号码的字母组合(17) 思路: 根据题意我们必须根据数字获取对应的字符数组,因此我们先定义1个字符数组表示这个电话表 private String[] letters {"","","abc","…...
路径之谜 蓝桥杯 89
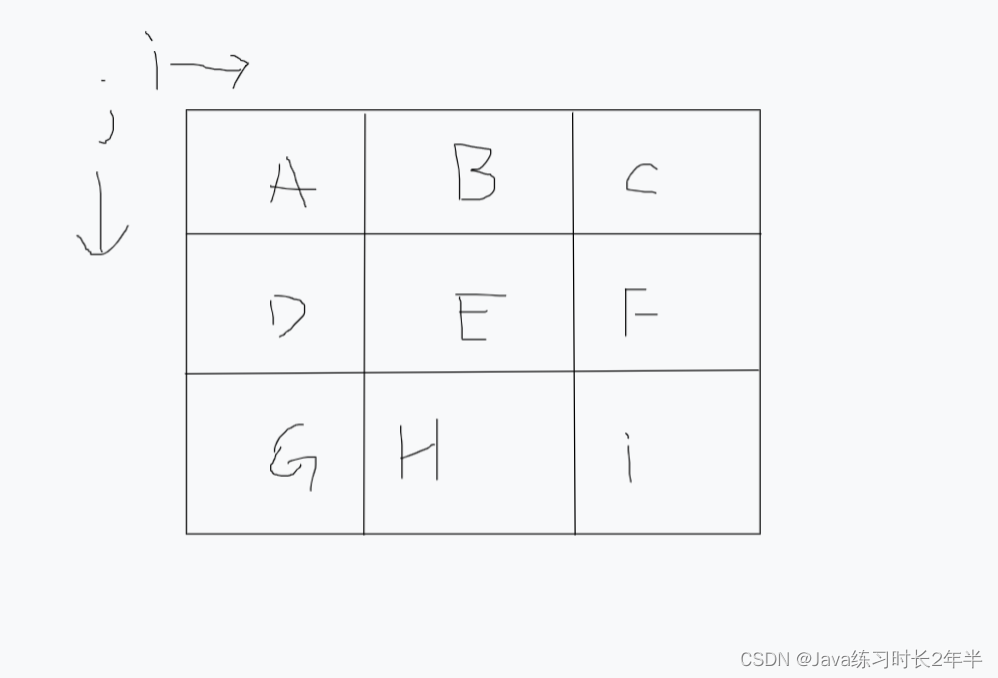
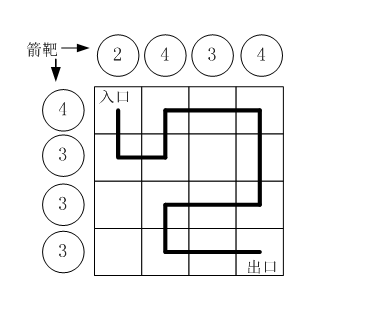
题目描述小明冒充 X 星球的骑士,进入了一个奇怪的城堡。城堡里边什么都没有,只有方形石头铺成的地面。假设城堡地面是 nn 个方格。如下图所示。按习俗,骑士要从西北角走到东南角。可以横向或纵向移动,但不能斜着走,也不…...

Mysql数据库如何调优
MYSQL数据库调优 索引 1、对于常用的查询字段加索引,但如果常用字段只有几个常量值就不需要加索引,或者使用索引会失效的情况; 2、索引失效的情况: 1、索引列使用函数,计算(加减乘除等) …...
CAN(FD)记录仪在新能源汽车整车控制器(VCU)、电池管理系统(BMS)、电机控制器(MCU)、发动机ECU中的应用,免去出差烦恼
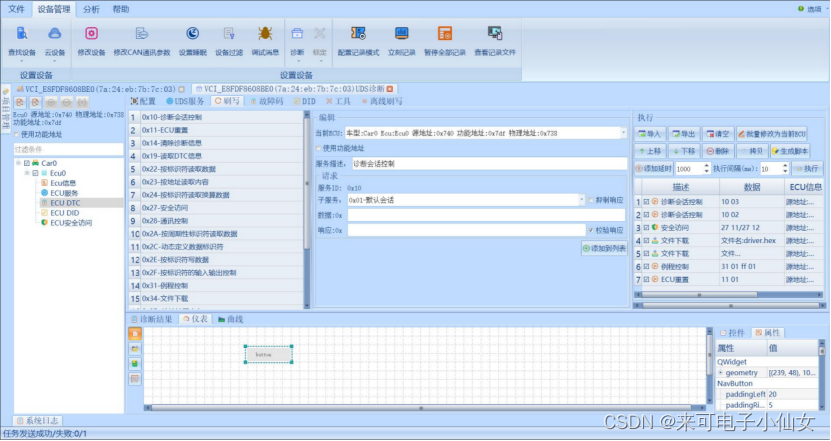
今天介绍CAN(FD)记录仪在新能源汽车整车控制器(VCU)、电池管理系统(BMS)、电机控制器(MCU)、发动机ECU中的应用 第一步:新能源汽车整车控制器(VCU)先供上电,…...

【设计模式】23种设计模式之七大原则
【设计模式】23种设计模式之七大原则什么是设计模式的原则1、单一职责原则基本介绍案例分析注意事项2、接口隔离原则基本介绍案例分析代码实现3、依赖倒转原则基本介绍案例分析依赖传递的三种方式注意事项4、里氏替换原则关于继承性的思考和说明基本介绍案例分析5、开闭原则ocp…...

python - 文件操作
1. 概念 计算机内存通常分为两种类型:主存储器和辅助存储器。 主存储器是计算机中最重要的存储器类型之一。它是计算机中用于存储正在运行的程序和数据的存储器。主存储器通常是易失性的,这意味着当计算机关闭时,其中存储的数据将被删除。主存…...

docker打包golang应用
一、错误的打包方式在本地环境编译,然后将可执行程序放入 alpine(docker.io/alpine:latest)准备web程序package mainimport ("fmt""net/http" )func main() {server : &http.Server{Addr: ":8888",}http.HandleFunc("/"…...
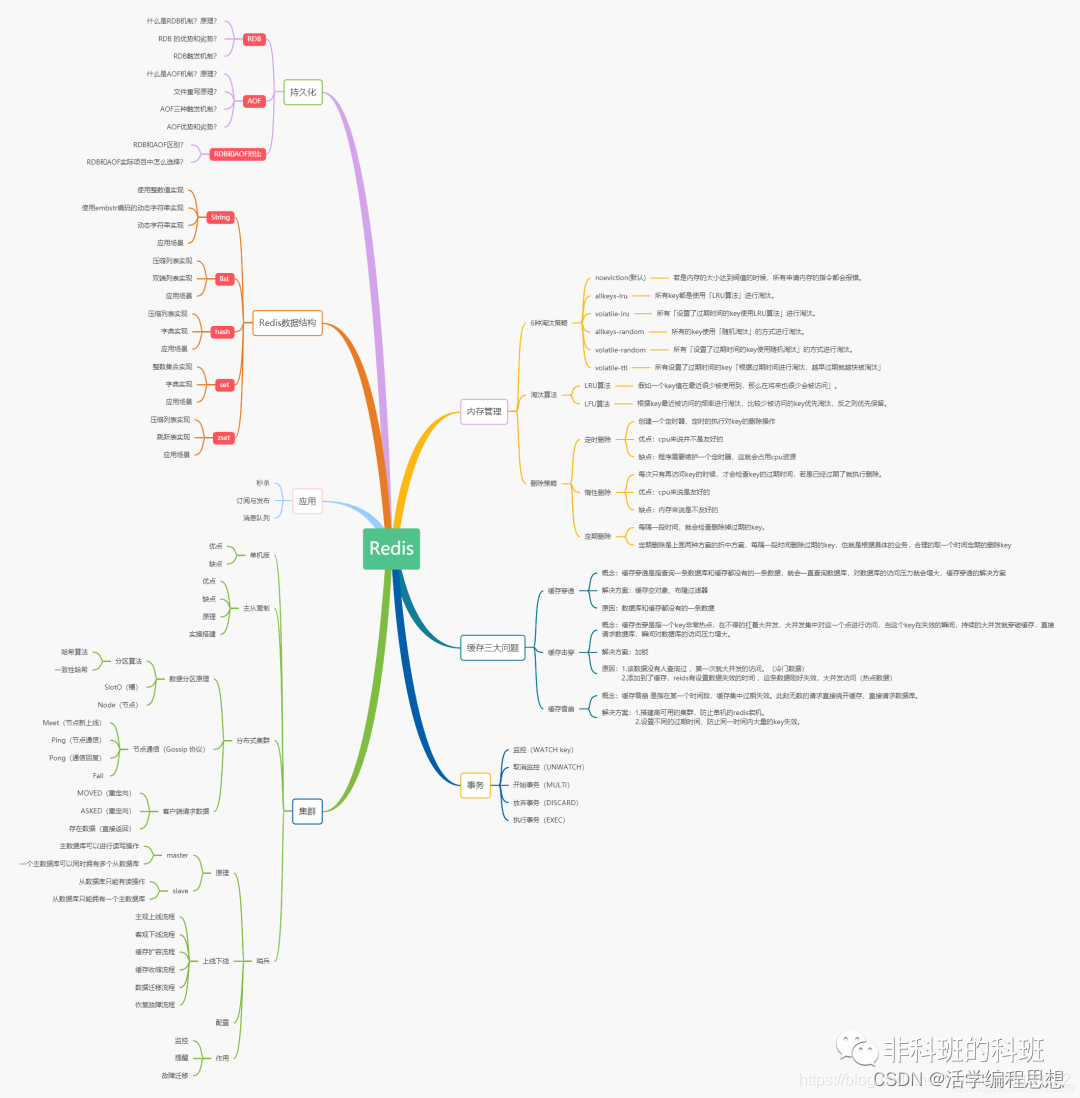
redis 内容总结
目录redis 内容列举Redis和Memcached比较Redis简介1、Redis 数据结构2、Redis的持久化机制3、Redis 内容管理(淘汰策略/删除策略)4、Redis 事务5、Redis 缓存三大问题6、Redis 集群7、Redis 应用redis 内容列举 官网:https://redis.io/ 中文…...
贪心算法(一)
一、概念 贪心算法的核心思想是,在处理一个大问题时,划分为多个局部并在每个局部选择最优解,并且认为在每个局部选择最优解,那么最后全局的问题得到的就是最优解。 贪心算法可以解决一些问题,但是不适用于所有问题&a…...

【栈和队列OJ题】有效的括号用队列实现栈用栈实现队列设计循环队列
📝个人主页:Sherry的成长之路 🏠学习社区:Sherry的成长之路(个人社区) 📖专栏链接:数据结构 🎯长路漫漫浩浩,万事皆有期待 文章目录OJ题1.有效的括号1.1…...

kuernetes 资源对象分析报错
文章目录1. pod 状态1.1 容器启动错误类型1.2 ImagePullBackOff 错误1.3 CrashLoopBackOff1.4 Pending2. Service 连接状态3. Ingress 连接状态1. pod 状态 创建一个 pod-status.yaml apiVersion: v1 kind: Pod metadata:name: runninglabels:app: nginx spec:containers:- na…...

动态内存的开辟
🐶博主主页:ᰔᩚ. 一怀明月ꦿ ❤️🔥专栏系列:线性代数,C初学者入门训练,题解C,C的使用文章,「初学」C 🔥座右铭:“不要等到什么都没有了,才下…...
【蓝桥杯-筑基篇】搜索
🍓系列专栏:蓝桥杯 🍉个人主页:个人主页 目录 递归树 1.递归构建二进制串 2.全排列的 DFS 解法 3.全排列的 BFS 解法 4.数的划分法 5.图书推荐 递归树 递归树是一种用于分析递归算法时间复杂度的工具。它可以将递归算法的执行过程可视化…...

week5-质数-最大公约数-快速幂-组合计数-博弈论
蓝桥 等差数列——欧几里得算法质数质数的判定——试除法分解质因数——试除法筛质数——埃氏筛法筛质数——线性筛法质数问题质数距离约数试除法求约数约数个数约数之和最大公约数-欧几里得算法(辗转相除法)扩展欧几里得算法裴蜀定理应用——线性同余方程消灭老鼠Hankson的趣…...
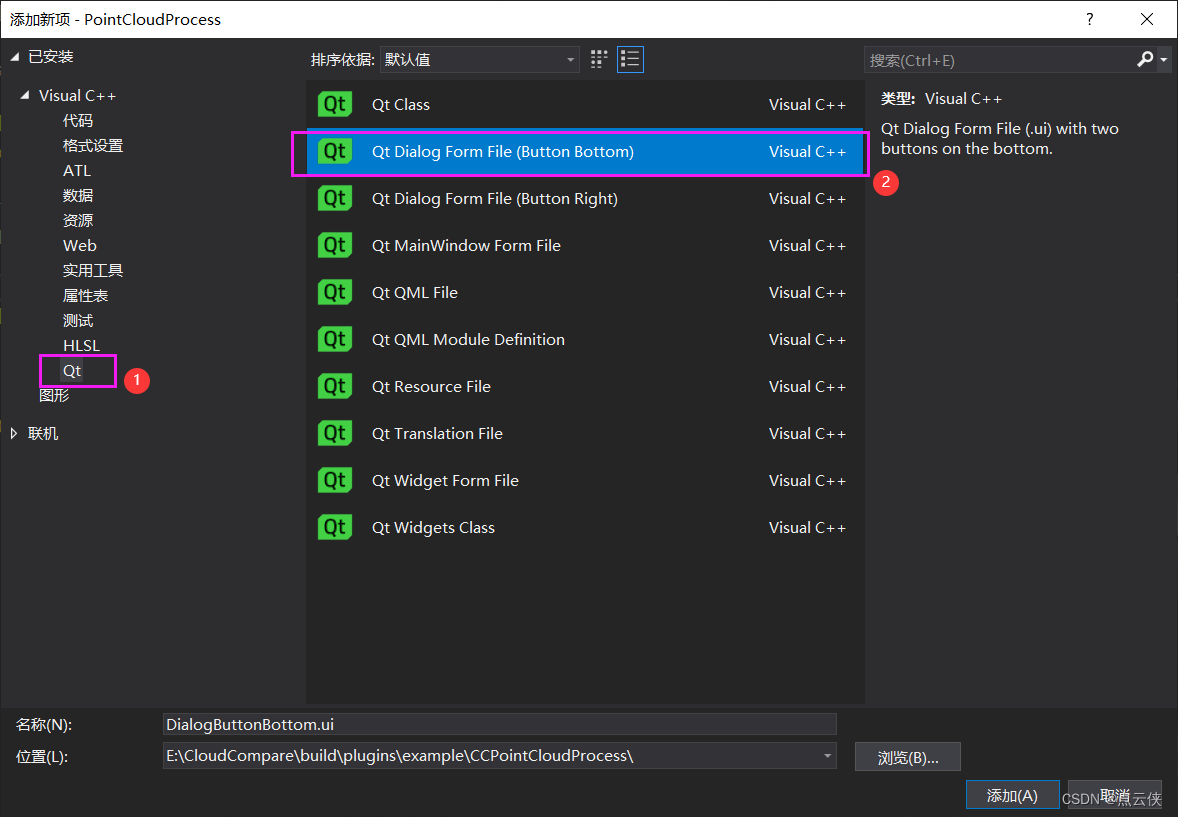
CloudCompare 二次开发(6)——插件中拖拽添加Qt窗口(区域生长算法为例)
目录 一、概述二、插件制作三、Cmake编译四、插件代码五、结果展示一、概述 手动拖拽的方式搭建Qt对话框界面的制作流程,以PCL中的点云区域生长算法为例进行制作。 二、插件制作 1、将....\plugins\example路径下的ExamplePlugin复制一份并修改名字为CCPointCloudProcess。 …...

2023值得推荐的高颜值Vue3.0 Web PC端UI框架,赶紧收藏学习!
Hello,我是前端胡说,本期给大家带来2023值得推荐的Vue3.0 UI组件库,希望大家喜欢! Vue3 正式发布已经有一段时间了,2022年2月也正式变成 Vue 项目的默认版本。在过去一年多的时间里,各大组件库、框架也紧跟…...
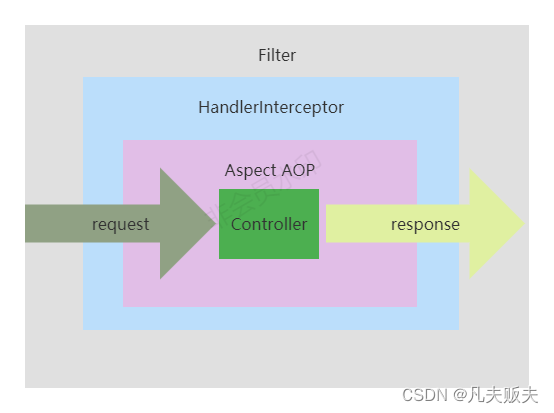
Springboot项目Aop、拦截器、过滤器横向对比
前言伟人曾经说过,没有调查就没有发言权(好像是伟人说的,不管谁说的,这句话是正确的),有些东西看着简单,张口就来,但很有可能是错的。我个人的经验是,aop、过滤器、拦截器的实现方式很简单&…...

Go语言轻量级代理工具curxy:命令行驱动的HTTP/S请求转发与Mock服务器实践
1. 项目概述:一个轻量级的本地代理工具最近在折腾一些本地开发环境,特别是需要处理跨域请求或者模拟特定网络环境时,总是绕不开代理这个环节。用 Nginx 配置吧,对于简单的转发需求来说有点重;用 Node.js 写个简单的 HT…...

Go语言Envoy实战:高性能代理与负载均衡
Go语言Envoy实战:高性能代理与负载均衡 1. Envoy概述 Envoy是Lyft开源的高性能代理,常作为服务网格的数据平面,提供负载均衡、熔断、重试等功能。 2. Go控制平面实现 package envoyimport ("api/envoy/api/v2/core""api/envoy…...

抖音无水印下载终极指南:免费工具完整使用教程
抖音无水印下载终极指南:免费工具完整使用教程 【免费下载链接】douyin-downloader A practical Douyin downloader for both single-item and profile batch downloads, with progress display, retries, SQLite deduplication, and browser fallback support. 抖音…...

Arm GIC虚拟中断控制器架构与寄存器详解
1. Arm GIC虚拟中断控制器架构概述 中断控制器是现代处理器架构中的关键组件,负责协调和管理来自各种外设的中断请求。在虚拟化环境中,传统的中断控制器面临新的挑战:如何高效处理来自多个虚拟机的中断请求,同时保持隔离性和性能。…...

5G有线网络标准化:从管道到智能融合基础设施的演进
1. 从“无线狂欢”到“有线觉醒”:5G标准化的另一面 如果你在2015年前后关注通信行业,印象最深刻的恐怕是各种关于5G的“炫技”新闻:毫米波、Massive MIMO、每秒数十Gb的峰值速率……整个行业仿佛陷入了一场关于“无线空口技术”的军备竞赛。…...

3个核心功能深度解析:Recaf字节码搜索的技术实践
3个核心功能深度解析:Recaf字节码搜索的技术实践 【免费下载链接】Recaf The modern Java bytecode editor 项目地址: https://gitcode.com/gh_mirrors/re/Recaf Recaf是一款现代化的Java字节码编辑器,专为逆向工程和代码分析设计。作为一款功能强…...

[hadoop] 初识Spark
初识Spark采用的方法是:由新手不断地追问老手问题,老手给出一定的回答。 在这个过程中,新手会慢慢理解Spark 参考资料: 《Hadoop 3.x大数据开发实战》 文章目录参考资料:11.11.2233.14555.166.16.21 Spark集群的启动…...

通过 Taotoken CLI 工具一键配置团队开发环境中的模型端点
🚀 告别海外账号与网络限制!稳定直连全球优质大模型,限时半价接入中。 👉 点击领取海量免费额度 通过 Taotoken CLI 工具一键配置团队开发环境中的模型端点 当团队需要统一接入多个大模型时,管理不同项目的 API 密钥、…...

模型版本爆炸、依赖漂移、推理熵增——SITS 2026提出的“动态契约管理”如何让AI系统稳定性提升4.8倍?
更多请点击: https://intelliparadigm.com 第一章:AI原生模型管理:SITS 2026 MLOps完整解决方案 SITS 2026 是面向AI原生工作负载设计的下一代MLOps平台,深度集成模型生命周期治理、可观测性引擎与边缘协同推理能力。其核心突破在…...

开源多模型API网关One API:统一管理GPT-4、Claude等大模型调用
1. 项目概述:一个统一的多模型API网关 如果你正在或计划在业务中集成多个不同厂商的大语言模型,比如同时调用OpenAI的GPT-4、Anthropic的Claude、Google的Gemini,或者国内的文心一言、通义千问等,那么你大概率会遇到一个头疼的问…...