基于DPU的容器冷启动加速解决方案
1. 方案背景
1.1. 业务背景
随着容器技术的迅猛发展与广泛应用,一种新的云计算服务模式应运而生-函数即服务(FaaS, Function as a Service)。FaaS作为一种无服务器(Serverless)计算方式,极大地简化了开发人员的工作,使他们能够专注于应用的构建与运行,而不再需要承担服务器管理的负担。
然而,FaaS模式也并非没有缺陷,其中最为人诟病的便是“冷启动”问题。所谓冷启动,是指当请求被调度到某个函数实例时,如果该实例在上次执行完代码后已经被回收,系统需要先创建一个新的实例并初始化环境,才能继续执行代码。
相比之下,热启动则是指函数实例未被回收的情况下,直接复用现有实例以响应请求,这显然效率更高。因此,冷启动过程常常导致较高的延迟,进而影响应用的性能。
1.2. 问题与挑战
1.2.1 传统方案
根据《Slacker: Fast Distribution with Lazy Docker Containers》一文的分析,镜像拉取过程占据了容器启动时间的76%,然而实际启动时只有6.4%的数据会被读取。这一现象揭示了传统容器镜像格式和拉取方式在使用overlay文件系统(OverlayFS)时存在的问题:
- 过多的时间花费在拉取镜像上。
- 拉取了过多无关的数据。
这两个问题的根源在于容器镜像是由一组tgz文件组成,而这些文件作为镜像层(image layer)存在以下两个显著缺点:
- 提取单个文件时,需要扫描整个layer。
- 同一层多个文件的提取不支持并行处理。
因此,使用OverlayFS的容器在启动前必须完成所有tgz文件的拉取和解压,这无疑增加了启动时间。
针对这些问题,社区已经提出了一些改进措施,具有代表性的两个解决方案是Stargz和DADI。
1.2.2 已有的改进方案
Stargz 是一种容器镜像加速技术,它采用了 Google的CRFS(Container Registry Filesystem)来重新组织容器镜像,以便实现更快的容器启动和更高效的文件检索。CRFS是一个只读的用户态文件系统,它使用了新的文件格式,使得镜像层内的文件可以被随机访问(seekable)。
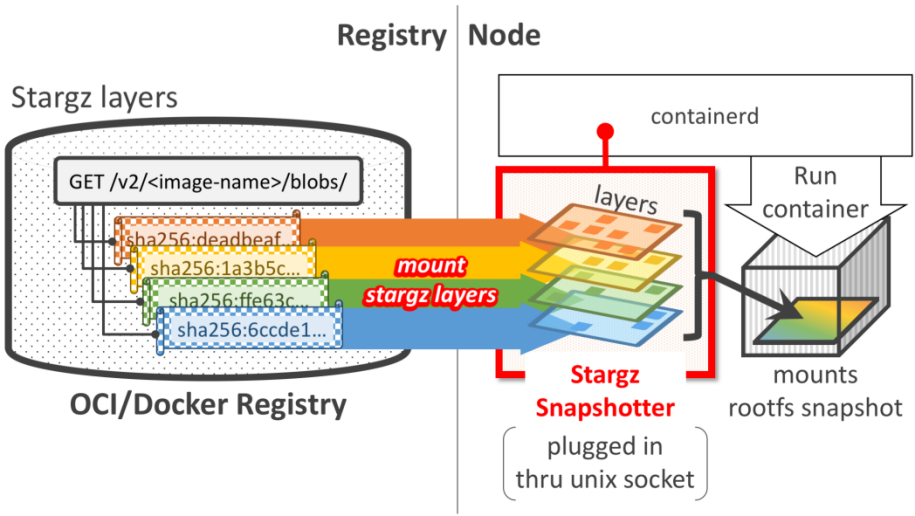
stargz架构图
使用Stargz启动容器时,无需拉取所有层到本地,而是远程挂载每一层到本地目录组成rootfs,从而实现容器的快速启动。容器启动之后的数据访问则是利用FUSE(用户态文件系统)按需获取。
DADI(Data Accelerator for Disaggregated Infrastructure)是阿里云针对容器加速的解决方案,DADI 的核心组件是 Overlaybd,这是一种基于块设备的镜像格式,提供了在block-based layer之上的一个合并视图,然后通过TCMU在Host上产生一个SCSI设备作为rootfs。TCMU(Target Core Module In Userspace),是scsi target的用户态实现,用于生成一个容器 rootfs 的 SCSI 设备。
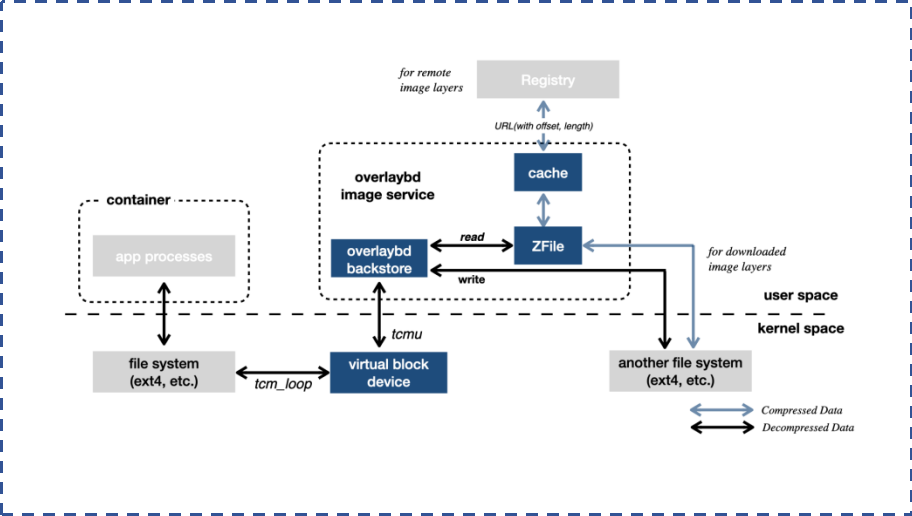
DADI架构图
使用DADI启动一个容器时,其也不用拉取所有层到本地,只是基于所有层块设备创建一个scsi device表示rootfs,实现容器的快速启动。容器启动之后的数据访问则是由tcmu按需获取,并且加入了本地缓存和ZFile加速数据的读取。
1.2.3 问题总结
综上所述,以上方案在实际应用中仍然存在以下问题:
- 传统OverlayFS容器的冷启动时间较长,这可能会对性能敏感的应用造成影响,导致较差的用户体验。
- 改进方案中的用户态文件系统需要占用一定的主机资源,这可能会对系统的整体性能产生影响。
2. 方案介绍
2.1. 整体架构
为了解决上述问题,我们构建了基于DPU的容器冷启动解决方案,以k8s为底座,以存储为核心,利用DPU的卸载和加速能力,使容器的冷启动更快,占用更少的host资源。整体架构如下所示:
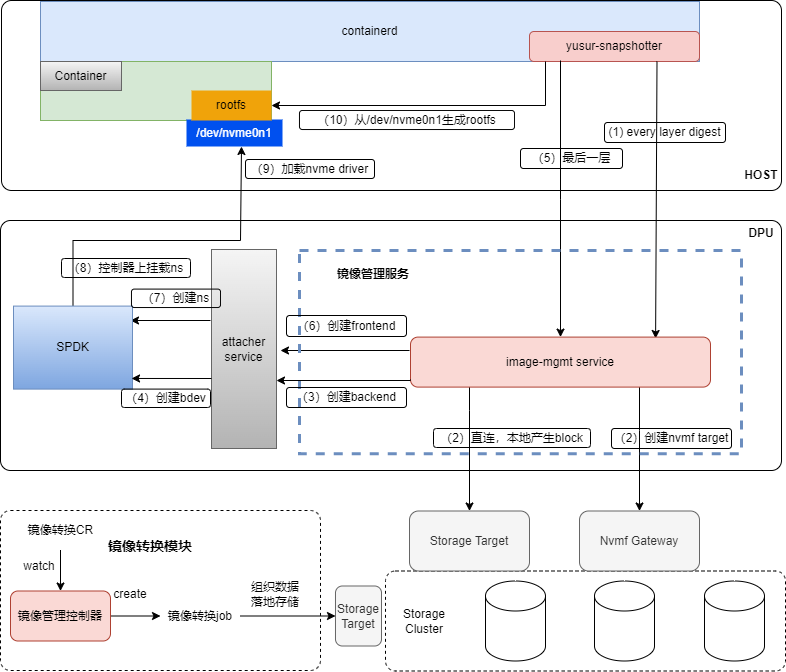
1-4):containerd会调用yusur-snapshotter准备rootfs每一层的内容快照,image-mgmt根据label参数连接存储,创建spdk bdev。
5-9):到最后一层时,需要创建NVMe subsystem/ctrl/ns,关联spdk bdev,此时在host侧给相应PCI绑定NVMe驱动,即可看到对应的NVMe disk。
10):yusur-snapshotter查到disk之后,按照不同的镜像格式生成容器启动的rootfs。
采用本方案启动容器时,首先DPU会通过NVMe/RDMA的方式连接远端存储,实现高效的数据传输,然后通过NVMe PCIE的方式直通给host,最后host基于这个直通的disk生成rootfs并启动容器。由于云盘原生支持按需读取的特性,本方案在容器启动过程中无需拉取镜像,从而显著加快容器的启动过程。
2.2. 方案描述
当使用本方案启动容器时,首先需要进行镜像转换,镜像转换的主要作用是将原始镜像按照 Lvol(逻辑卷)的方式落地到存储中,并将镜像元数据推送至镜像仓库,供容器启动时使用。
同时本方案在镜像转换时支持两种镜像格式yusur-overlayfs和yusur-overlaybd。yusur-overlayfs和原生的镜像格式一样,按照overlay的方式生成rootfs,主要用于兼容overlay的场景;yusur-overlaybd以块设备的方式作为rootfs,原生支持可写层和理论上性能较overlayfs好。
2.2.1. 镜像转换
镜像转换主要责任是基于SPDK snapshot机制把原生镜像按需转换成以上两种格式的镜像,镜像数据存到存储,元数据存到镜像仓库。镜像转换有两种工作模式:普通模式和DPU模式。在DPU模式下,能利用DPU的加速能力,可以显著加快镜像转换的速度。
普通模式的架构如下图所示,其组件主要包含image-ctrl,attacher service,opi-spdk-bridge和原生spdk。

红色线条表示数据走向,job拉取原镜像层数据,按不同镜像格式写到nbd设备中。各个组件的作用如下:
- Image-ctrl,镜像控制器:接收镜像转换yaml,创建转换job。job负责创建块存储,调用attach service创建和克隆lvol,完成镜像层数据写入lvol和推送转换后镜像元数据至仓库。
- Attacher service:对opi-bridge操作的抽象,对上提供opi-bridge的能力
- Opi-spdk-bridge:对接原生SPDK的opi-bridge,提供原生SPDK的基本操作
- SPDK:原生SPDK提供快照,克隆的能力
DPU模式的架构如下图所示,其组件主要包含image-ctrl,image-mgmt,attacher ,opi-bridge和DPU spdk。
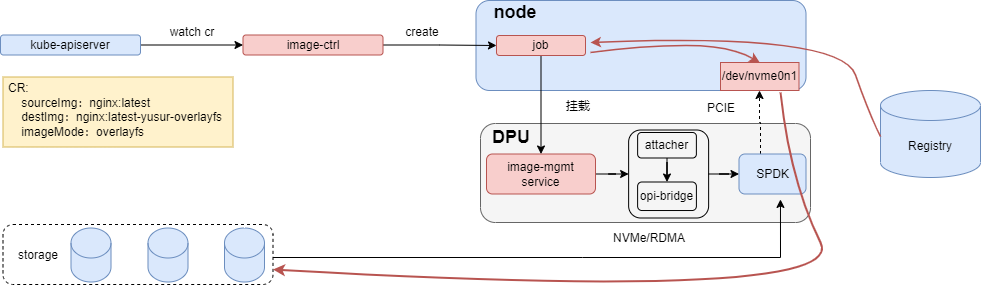
红色线条表示数据走向,job拉取原镜像层数据,按不同镜像格式写到NVMe disk中,各个组件的作用如下:
- Opi-bridge:提供不通DPU的存储能力API
- SPDK:不同DPU的SPDK 服务,提供NVMe disk的模拟功能
2.2.2. 镜像格式
使用两种镜像创建容器时,处理流程基本一致,差异在镜像数据的组织方式和rootfs的组成方式,yusur-overlayfs镜像格式如下所示。
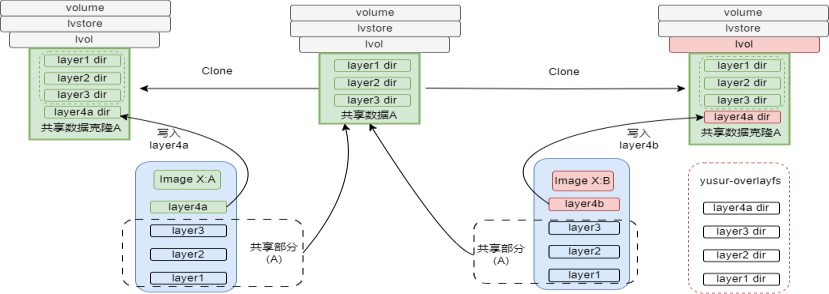
如上图所示,镜像X:A完成镜像转换之后,生成数据A,镜像X:B在转换时直接使用这部分数据,镜像X:B其他数据基于克隆的lvol写入。共享数据可以包含一个或多个lvol,它们之间也是通过clone链接在一起。
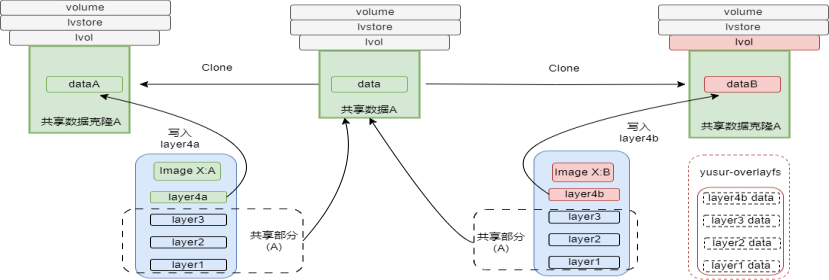
yusur-overlaybd的镜像格式如下图所示,与yusur-overlayfs镜像每层数据写到lvol不同目录的方式不同,yusur-overlaybd的镜像数据会直接写入lvol。
两种镜像格式的rootfs组成如下图所示。
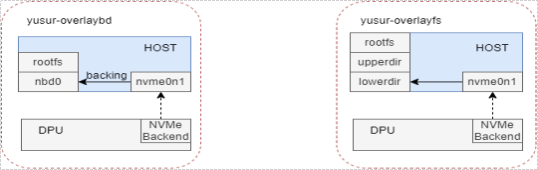
yusur-overlaybd以nbd设备作为rootfs,不用额外的可写层;而yusur-overlayfs是以块设备中的多个目录作为lowerdir,然后加一个可写层作为upperdir构成rootfs。
2.2.3. 容器启动
容器启动流程请参考”整体架构”章节。当用转换镜像启动容器时,containerd会根据镜像元数据生成一些labels,这些labels会作为参数传递给yusur-snapshotter,yusur-snapshotter会根据这些labels,创建不同的存储target。
目前支持两种形式的存储target,本地AIO和远程NVMe-OF,NVMe-OF同时又支持两种连接方式NVMe/TCP和NVMe/RDMA。在容器启动过程中主要涉及以下组件yusur-snapshotter,image-mgmt service和attacher service,作用如下:
- Yusur-snapshotter:实现containerd的snapshotter接口,负责准备容器启动的rootfs
- Image-mgmt service:和snapshotter交互,以AIO或NVMe-OF的方式创建和挂载块设备。
3. 方案测试结果
3.1. 功能测试
3.1.1. 镜像转换
创建镜像转换CR之后,控制器就会创建job进行镜像转换。以下是yusur-overlayfs和yusur-overlaybd转换成功的截图:

转换成功之后,会更新CR status,blocks会包含目的镜像对应存储的卷,多个卷之间是以clone的方式递进,以yusur-overlayfs为例,如下所示:
| apiVersion: iaas.yusur.io/v1 kind: ImageConvertor metadata: name: nginx-latest-overlayfs namespace: image-mgmt spec: destImage: harbor.yusur.tech/cidg/img_test/nginx:latest-yusur-overlayfs imageMode: overlayfs sourceImage: harbor.yusur.tech/cidg/img_test/nginx:latest virtualSizeByGB: 100 status: blocks: - global-ba870cf5-6c3c-4cf6-95f3-d3963086b4e9 - local-e39cacaa-5c3e-4676-a014-d513a1ca0c09 - soldier-f64acdbb-4255-4999-81f8-652e1741120f imageMode: overlayfs ready: true |
转换成功之后,目的镜像会推送至镜像仓库,其作用是在容器启动时,提供存储相关的元数据,如下所示:
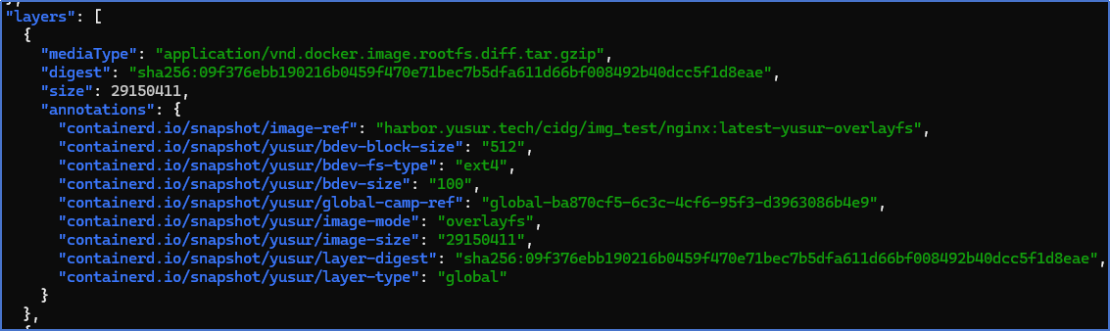
Annotation中包含该层所在的块设备,镜像格式,文件系统等信息,这些信息会作为labels传递给yusur-snapshotter。
3.1.2. Pod启动
pod启动之后,可以查看rootfs组成,如下所示:
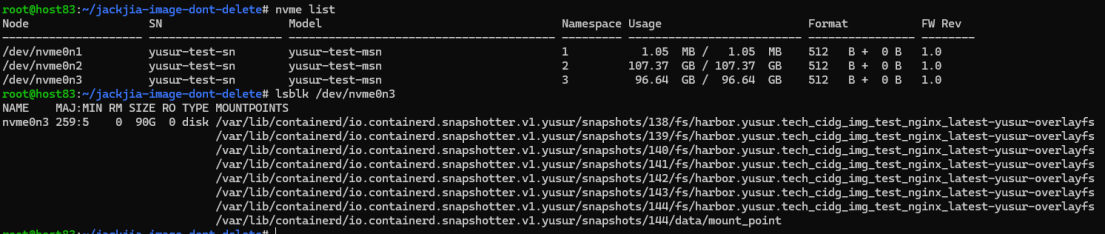
Yusur-overlayfs:

overlayfs格式的镜像,块设备中包含镜像的每一层数据,挂载后把相关层目录,bind到对应的snapshot,构成overlay的lowerdir。

Yusur-overlaybd:
overlaybd格式的镜像, 块设备中包含镜像的rootfs;没有把块设备直接作为容器启动的rootfs,考虑到还需要一个可写层,所以基于块设备创建一个qcow2的本地文件,然后本地文件通过nbd暴露出来,作为容器启动的rootfs和可写层。
3.2. 性能测试
性能测试包括5种方案,本方案提供了其中的两种yusur-overlayfs/NVMe/RDMA和yusur-overlaybd/NVMe/RDMA。yusur-overlayfs/NVMe/RDMA表示镜像格式是yusur-overlayfs,存储target是NVMe-OF,连接方式是RDMA;yusur-overlaybd/NVMe/RDMA同yusur-overlayfs,只是镜像格式不同。
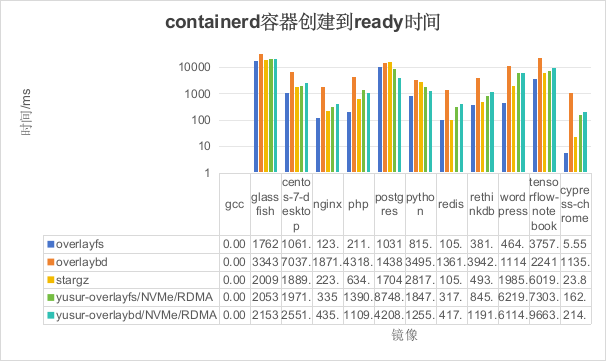
3.2.1. Containerd下的容器启动耗时测试
我们将测试整个容器启动过程中的时间消耗,具体分为三个阶段:镜像拉取、容器创建和服务ready。
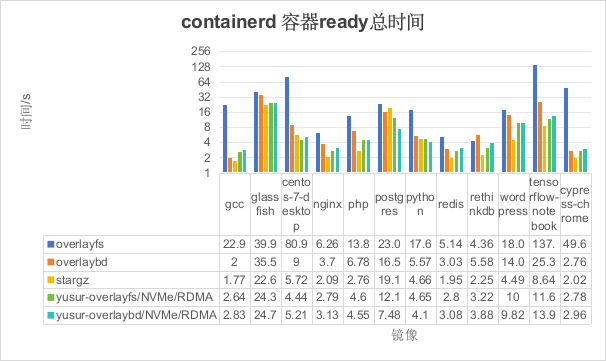
如上图所示,纵坐标表示容器ready时间(单位:秒),横坐标表示镜像名称。由于此场景只是去掉了k8s的影响,结论同2.2.1, 如下:
- 本方案的yusur-overlayfs较overlayfs有63%的性能提升,因为不用拉取所有数据到本地;
- 本方案的yusur-overlaybd较DADI overlaybd有34%的性能提升,是因为本方案io路径更短。
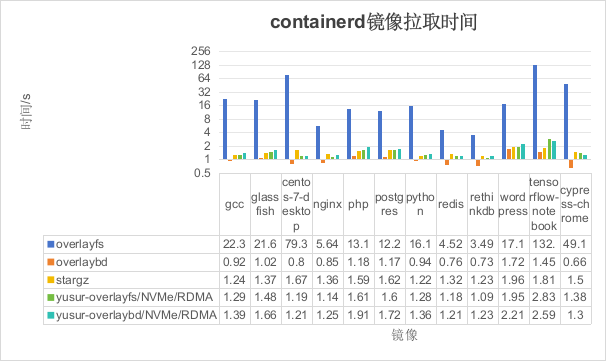
如上图所示,可以得出如下结论:
- overlaybd镜像拉取是最快的,因为overlaybd在这个过程中只生成TCMU的config文件;
- 本方案的两种方法都较overlaybd慢,是因为本方案在镜像拉取中需要挂载云盘。
- stargz也比overlaybd慢,是因为stargz在镜像拉取中需要挂载用户态文件系统
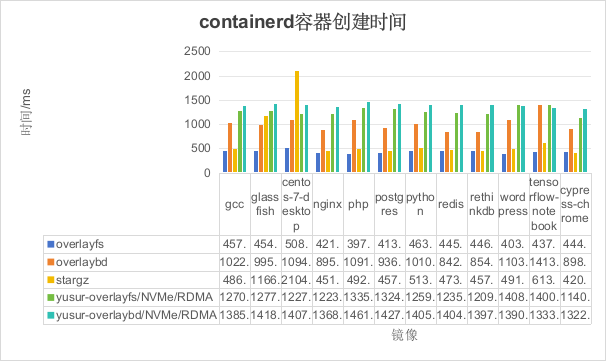
如上图所示,可以得出如下结论:
- 由于 OverlayFS 的数据已经在本地,因此 OverlayFS 的容器创建时间仅包括 runc 的操作以及启动命令的时间。
- 本方案的两种方法中,容器创建时间较高,因为本方案的 rootfs 基于 DPU 提供的云盘,yusur-snapshoter 需要创建 NVMe 系统(前端)并执行找盘操作。
- stargz 在 CentOS 上消耗的时间较多,是因为 stargz 需要预加载(在这里需要预拉取 80M 的数据,主要时间消耗在这里)。
- 对于 overlaybd,由于其原理上与本方案基本相同,都是利用文件系统实现按需拉取,因此时间上基本差不多。
如上图所示,可以得出如下结论:
- 容器gcc消耗时间基本没有,是因为gcc启动命令只是执行了gcc --version,这个在容器创建时,已经就执行完了
- OverlayFS 的耗时最短,因为在镜像拉取阶段,镜像数据已经被下载并存储在本地
- Stargz由于前一过程预拉取了部分数据,所以总体时间上略高于OverlayFS。
- 本方案的 yusur-overlaybd 优于 overlaybd,主要是因为它在后期数据读取方面表现更佳。与 overlaybd 需要通过 TCMU 定位文件偏移量并使用 HTTP Range Request 向 registry 请求数据的方式不同,本方案直接通过内核 VFS,并采用 NVMe/RDMA 的方式进行数据传输,因而具有更低的延迟。
- 本方案的 yusur-overlayfs 相较于 stargz 和 overlayfs 表现稍逊,主要原因在于 overlayfs 的数据已存储在本地,而 stargz 在容器启动前已完成热点数据的预提取,而本方案则缺少数据预提取这一过程。
3.2.2. 镜像转换耗时测试
由于两种镜像格式相差不大,故采用 yusur-overlayfs 作为对比,测试结果如下所示:
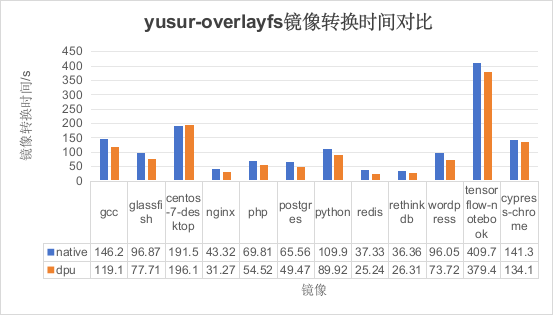
如上图所示,纵坐标表示不同模式下镜像转换时间(单位:秒),横坐标表示镜像名称。可以得出如下结论:
- 基于DPU的镜像转换方案可以降低镜像转换的时间,但是效果不是太明显。不明显的原因是受制于后端存储CEPH,导致RDMA发挥不出优势。
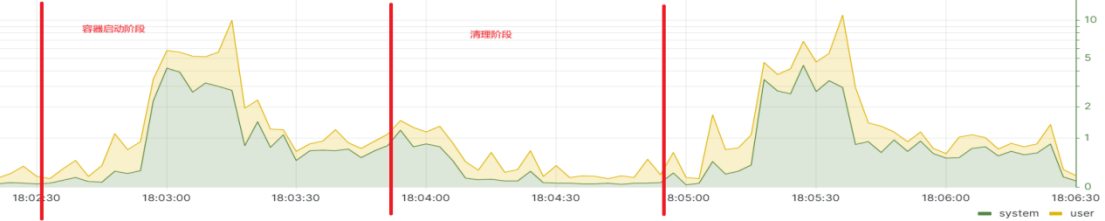
3.3. 资源消耗测试
3.3.1. CPU消耗测试
stargz两次测试结果:如图所示,CPU最高使用率20.17%,平均使用率4.22%。

overlayfs两次测试结果:如图所示,CPU最高使用率14.77%,平均使用率2.78%。

overlaybd两次测试结果:如图所示,CPU最高使用率11.4%,平均使用率3.27%。

yusur-overlayfs两次测试结果:如图所示,CPU最高使用率7.66%,平均使用率1.95%。

yusur-overlaybd两次测试结果:如图所示,cpu最高使用率10.02%,平均使用率2.17%。
整体使用率较yusur-overlayfs高,从system使用率观察可以得出是nbd这一层导致的。
汇总结果如下:

从以上所有图片,得出如下结论:
- 本方案的最高CPU使用率最低;
- 本方案的cpu高利用率维持时间最短,只有30s左右。
3.3.2. 内存消耗测试
stargz两次测试结果:如图所示,最高内存使用7.67G,平均内存使用6.86G。

overlayfs两次测试结果:如图所示,最高内存使用5.71G,平均内存使用5.16G。

overlaybd两次测试结果:如图所示,最高内存使用5.21G,平均内存使用4.94G。

yusur-overlayfs两次测试结果:如图所示,最高内存使用5.28G,平均内存使用4.87G。

yusur-overlaybd两次测试结果:如图所示,最高内存使用5.62G,平均内存使用5.01G。

汇总结果如下:

从以上所有图片,得出如下结论:
- 本方案的消耗的内存最低;
- 本方案的内存高消耗维持时间最短,只有60s左右。
4. 总结
4.1. 测试结果总结
- 在 K8s 场景下,本方案的 yusur-overlayfs 相比于传统方案 overlayfs,性能提升了 57%;而相比改进方案 DADI,yusur-overlaybd 的性能也提升了 20%
- 在 Containerd 场景下,本方案的 yusur-overlayfs 相比传统方案 overlayfs,性能提升了 63%;而 yusur-overlaybd 相较于改进方案 DADI,性能也提升了 34%。
- 控制面和数据面下沉至 DPU,有效减少了主机资源的消耗。从测试结果来看,本方案的 CPU 和内存占用率以及持续时间均为最低。
- 从镜像cypress-chrome(624.2 MiB)、centos(1.3GiB)、tensorflow-notebook(1.7 GiB)的启动时间看,在本方案中,容器冷启动时间随着镜像大小的增加,其时间优势变得越加明显。
- 从镜像转换的测试结果来看,镜像越大,基于 DPU 的方案在时间上表现出越明显的优势,因为它能够利用 DPU 的 RDMA 能力。类推到容器启动过程中,所需的数据量越大,本方案的优势也会越加显著。
4.2. 方案价值
基于DPU的容器冷启动加速解决方案具有如下价值:
1、提升服务响应速度和用户体验:在FaaS中,由于函数实例是动态创建的,首次调用函数时可能会遇到冷启动延迟,即容器从停止状态到运行状态所需的时间。快速冷启动技术能够显著缩短这一时间,使得用户请求能够更快地得到响应,从而提升用户体验。
2、提高业务吞吐量:快速冷启动使得FaaS平台能够在短时间内启动更多的函数实例,以应对突发的流量高峰,从而提高业务的整体吞吐量。
3、提高系统可用性:在微服务架构和分布式系统中,服务的快速冷启动可以确保在服务实例故障时,能够迅速恢复服务,减少服务中断时间,提高系统的整体可用性。
4、提升资源利用效率:控制面和数据面下沉至 DPU,有效减少了主机资源的消耗,这意味着在实际应用场景中,将大大节省了宝贵的CPU和内存资源,让这些资源能够被应用服务更高效地利用。
综上所述,基于DPU的容器冷启动加速解决方案对于提升服务响应速度和用户体验、提高业务吞吐量、提高系统可用性、提升资源利用效率等方面都具有重要的价值和意义,随着云原生和无服务器计算的不断发展,该方案将具有广阔的应用前景。
本方案来自于中科驭数软件研发团队,团队核心由一群在云计算、数据中心架构、高性能计算领域深耕多年的业界资深架构师和技术专家组成,不仅拥有丰富的实战经验,还对行业趋势具备敏锐的洞察力,该团队致力于探索、设计、开发、推广可落地的高性能云计算解决方案,帮助最终客户加速数字化转型,提升业务效能,同时降低运营成本。
相关文章:
基于DPU的容器冷启动加速解决方案
1. 方案背景 1.1. 业务背景 随着容器技术的迅猛发展与广泛应用,一种新的云计算服务模式应运而生-函数即服务(FaaS, Function as a Service)。FaaS作为一种无服务器(Serverless)计算方式,极大地简化了开发…...

SOME/IP 通信协议详细介绍
标签: SOME/IP 通信协议详细介绍; SOME/IP; SOME/IP 通信协议详细介绍 SOME/IP 通信协议详细介绍 官网: https://some-ip.com/ 1. 什么是SOME/IP? SOME/IP(Scalable service-Oriented MiddlewarE over IP…...

基于Boost库的搜索引擎开发实践
目录 1.项目相关背景2.宏观原理3.相关技术栈和环境4.正排、倒排索引原理5.去标签和数据清洗模块parser5.1.认识标签5.2.准备数据源5.3.编写数据清洗代码parser5.3.1.编写读取文件Readfile5.3.2.编写分析文件Anafile5.3.2.编写保存清洗后数据SaveHtml5.3.2.测试parser 6.编写索引…...

【2023年】云计算金砖牛刀小试3
A场次题目:OpenStack平台部署与运维 业务场景: 某企业拟使用OpenStack搭建一个企业云平台,用于部署各类企业应用对外对内服务。云平台可实现IT资源池化,弹性分配,集中管理,性能优化以及统一安全认证等。系统结构如下图: 企业云平台的搭建使用竞赛平台提供的两台云服务…...

在以太坊中不同合约之间相互调用的场景有哪些?
在以太坊中,合约调用合约的场景有很多,以下是一些常见的情况: 一、复杂业务逻辑的拆分 模块化设计: 当一个智能合约的业务逻辑变得复杂时,可以将其拆分为多个较小的合约,每个合约负责特定的功能。例如&…...

关于 PC打开“我的电脑”后有一些快捷如腾讯视频、百度网盘、夸克网盘、迅雷等各种捷方式在磁盘驱动器上面统一删除 的解决方法
若该文为原创文章,转载请注明原文出处 本文章博客地址:https://hpzwl.blog.csdn.net/article/details/142029325 长沙红胖子Qt(长沙创微智科)博文大全:开发技术集合(包含Qt实用技术、树莓派、三维、OpenCV…...

数据结构——初识数据结构
数据结构——初识数据结构 数据结构的概念数据的类型时间复杂度 数据结构的概念 相互之间存在一种或多种特定关系的数据元素的集合。数据结构是计算机科学中的一个基本概念,它是指数据元素之间的关系和组织方式。数据结构是计算机存储、组织数据的方式,…...

每日搜索论坛回顾:2024年9月13日
Google正在测试一个新的广告标签标题,使广告更加明显。Google搜索排名的波动仍然非常剧烈,即使在核心更新完成一周后仍然如此。Google正在向本地服务广告的广告主发送验证通知。Bing正在测试带有评论来源图标的本地包。Google AdSense正在将自动广告扩展…...
猎板PCB大讲堂:PCB设计铺铜技巧与策略全解析
在电子工程领域,PCB的设计不仅仅是连接电子元件的桥梁,更是确保设备性能和稳定性的关键。铺铜,作为PCB设计中的一个微妙而强大的环节,常常被低估。 猎板PCB带您深入了解铺铜的艺术,探讨其背后的科学原理,以…...

Matplotlib - Statistical Distribution作图
1. 前言 在数据分析和统计学中,绘制统计分布图是非常重要的,因为它帮助我们直观地理解数据的特性,并为进一步的分析提供基础。统计分布图能够揭示数据集的结构、趋势、集中趋势和离散程度等信息,从而使我们更容易做出合理的假设、…...

【机器学习】9 ——最大熵模型的直观理解
系列文章目录 提示:写完文章后,目录可以自动生成,如何生成可参考右边的帮助文档 文章目录 系列文章目录前奏例子硬币垃圾邮件代码 前奏 【机器学习】6 ——最大熵模型 例子 硬币 假设我们有一枚硬币,可能是公平的,…...

1.单例模式
目录 简介 饿汉式 懒汉式 双重检测锁式 静态内部类式 枚举单例 测试 测试单例模式: 测试五种单例模式在多线程环境下的效率 问题(拓展) 例:反射破解单例模式 例:反序列化破解单例模式 总结:如何…...

数据倾斜问题
数据倾斜:主要就是在处理MR任务的时候,某个reduce的数据处理量比另外一些的reduce的数据量要大得多,其他reduce几乎不处理,这样的现象就是数据倾斜。 官方解释:数据倾斜指的是在数据处理过程中,由于某些键…...

大龄焦虑?老码农逆袭之路:拥抱大模型时代,焕发职业生涯新活力!
其实我很早就对大龄程序员这个话题感到焦虑,担心自己35岁之后会面临失业,有时和亲戚朋友聊天时,也会经常拿这个出来调侃。现在身边已经有很多35岁左右的同事,自己过两年也会步入35岁的行列,反倒多了一份淡定和从容。 …...

Vue 页面反复刷新常见问题及解决方案
Vue 页面反复刷新常见问题及解决方案 引言 Vue.js 是一个流行的前端框架,旨在通过其响应式的数据绑定和组件化的开发模式简化开发。然而,在开发 Vue.js 应用时,页面反复刷新的问题可能会对用户体验和开发效率产生负面影响。本文将深入探讨 …...
Windows上指定盘符-安装WSL虚拟机(机械硬盘)
参考来自于教程1:史上最全的WSL安装教程 - 知乎 (zhihu.com)https://zhuanlan.zhihu.com/p/386590591#%E4%B8%80%E3%80%81%E5%AE%89%E8%A3%85WSL2.0 教程2:Windows 10: 将 WSL Linux 实例安装到 D 盘,做成移动硬盘绿色版也不在话下 - 知乎 (z…...
ffmpeg实现视频的合成与分割
视频合成与分割程序使用 作者开发了一款软件,可以实现对视频的合成和分割,界面如下: 播放时,可以选择多个视频源;在选中“保存视频”情况下,会将多个视频源合成一个视频。如果只取一个视频源中一段视频…...

团体标准的十大优势
一、团体标准是什么 团体标准是指由社会团体(行业协会、联合会、企业联盟等)按照自己确立的制定程序,自主制定、发布、采纳,并由社会自愿采用的标准。简单的说,就是社会团体为了满足市场和创新需要,协调相…...
任务、动态添加停止单个cron任务)
java spring boot 动态添加 cron(表达式)任务、动态添加停止单个cron任务
java spring boot 动态添加 cron(表达式)任务、动态添加停止单个cron任务 添加对应的maven <dependency><groupId>org.quartz-scheduler</groupId><artifactId>quartz</artifactId><version>2.3.0</version…...

sqlgun靶场漏洞挖掘
1.xss漏洞 搜索框输入以下代码,验证是否存在xss漏洞 <script>alert(1)</script> OK了,存在xss漏洞 2.SQL注入 经过测试,输入框存在SQL注入漏洞 查询数据库名 查询管理员账号密码 此处密码为MD5加密,解码内容如下 找…...

3步实现专业级AI换脸:roop-unleashed创新方案指南
3步实现专业级AI换脸:roop-unleashed创新方案指南 【免费下载链接】roop-unleashed Evolved Fork of roop with Web Server and lots of additions 项目地址: https://gitcode.com/gh_mirrors/ro/roop-unleashed 在数字创意飞速发展的今天,AI换脸…...

ADXL335模拟传感器读数不稳?手把手教你用Arduino进行软件滤波与校准
ADXL335模拟传感器读数不稳?手把手教你用Arduino进行软件滤波与校准 当你把ADXL335加速度计接入Arduino,兴奋地跑起第一个测试程序时,那些跳动的数字可能很快会浇灭你的热情。原始读数像得了疟疾般颤抖,静止时本该稳定的1g重力加速…...

Windows Android子系统深度优化:WSABuilds项目架构解析与实战部署指南
Windows Android子系统深度优化:WSABuilds项目架构解析与实战部署指南 【免费下载链接】WSABuilds Run Windows Subsystem For Android on your Windows 10 and Windows 11 PC using prebuilt binaries with Google Play Store (MindTheGapps) and/or Magisk or Ker…...

Helm-Intellisense:VS Code智能补全插件,提升values.yaml编写效率
1. 项目概述:为什么我们需要一个Helm智能补全工具?如果你和我一样,日常工作中大量使用Helm来管理Kubernetes应用,那你一定对编写values.yaml文件时那种“盲人摸象”的感觉深有体会。面对一个动辄几十上百行配置的Helm Chart&#…...

工作流编排核心原理与实践:从概念到MiniFlow系统实现
1. 项目概述:从代码仓库到工作流编排的实践最近在梳理团队内部的一些自动化流程,发现很多脚本和任务散落在各个角落,执行依赖混乱,出了问题排查起来像大海捞针。正好看到GitHub上有个叫dnh33/workflow-orchestration的项目&#x…...

从零构建现代化工作流引擎:架构、实战与生产级部署指南
1. 项目概述:一个为专业开发者打造的现代化工作流引擎最近在GitHub上看到一个挺有意思的项目,叫rohitg00/pro-workflow。光看名字,你可能觉得这又是一个“工作流”工具,市面上这类工具已经多如牛毛了。但当我深入去研究它的源码、…...

Nixtla时间序列预测生态:从统计模型到深度学习的统一实践
1. 项目概述:时间序列预测的“瑞士军刀”如果你正在处理时间序列数据,无论是销售预测、服务器监控、还是能源消耗分析,那么你很可能听说过或正在使用一些经典的库,比如statsmodels、prophet,或者更现代的深度学习框架。…...

ITK-SNAP医学图像分割:破解三维解剖结构提取的工程难题
ITK-SNAP医学图像分割:破解三维解剖结构提取的工程难题 【免费下载链接】itksnap ITK-SNAP medical image segmentation tool 项目地址: https://gitcode.com/gh_mirrors/it/itksnap 当我们面对复杂的脑部MRI数据、肿瘤CT扫描或心血管影像时,最大…...

树莓派5驱动128x128 LED矩阵:打造复古PICO-8游戏艺术墙
1. 项目概述与核心思路我一直对复古游戏和像素艺术情有独钟,也一直想在家里弄一个既有科技感又能玩的装饰品。最近,我把树莓派5、四块64x64的RGB LED矩阵面板和PICO-8幻想游戏机捣鼓到了一起,成功在墙上挂起了一个128x128像素的“游戏艺术墙”…...

2026杭州本地GEO优化公司排名,优质机构一站式推荐
AI 搜索时代,不少杭州企业踩过这样的坑:花大价钱找服务商做 GEO 优化,每天产出大量文章,结果在豆包、DeepSeek 等 AI 大模型里搜不到品牌信息,询盘没涨、获客成本反倒飙升。GEO 优化从来不是 “堆文章”,而…...