Robot Operating System——线速度和角速度
大纲
- 应用场景
- 1. 移动机器人控制
- 场景描述
- 具体应用
- 2. 无人机控制
- 场景描述
- 具体应用
- 3. 机械臂运动控制
- 场景描述
- 具体应用
- 4. 自动驾驶车辆控制
- 场景描述
- 具体应用
- 5. 机器人仿真
- 场景描述
- 具体应用
- 6. 机器人传感器数据处理
- 场景描述
- 具体应用
- 定义
- 字段解释
- 案例
geometry_msgs::msg::Twist 是 ROS 2 中的一个消息类型,用于表示线速度和角速度。它通常用于描述机器人在三维空间中的运动状态,包括平移和旋转。Twist 消息类型在机器人学、自动驾驶、无人机控制等领域有广泛的应用。
应用场景
1. 移动机器人控制
场景描述
在移动机器人控制中,需要使用线速度和角速度来描述和控制机器人的运动状态。这对于实现机器人在复杂环境中的自主运动和精确导航至关重要。
具体应用
- 差速驱动机器人:使用 Twist 消息控制差速驱动机器人的线速度和角速度。例如,在机器人导航任务中,使用 Twist 消息控制机器人的前进速度和转向角度,以实现路径跟踪和避障。
- 全向移动机器人:使用 Twist 消息控制全向移动机器人的线速度和角速度。例如,在机器人仓储任务中,使用 Twist 消息控制机器人的运动,以实现灵活的物品搬运。
- 四轮驱动机器人:使用 Twist 消息控制四轮驱动机器人的线速度和角速度。例如,在机器人巡检任务中,使用 Twist 消息控制机器人的运动,以实现精确的巡检操作。
2. 无人机控制
场景描述
在无人机控制中,需要使用线速度和角速度来描述和控制无人机的运动状态。这对于实现无人机在三维空间中的稳定飞行和精确操作非常重要。
具体应用
- 姿态控制:使用 Twist 消息控制无人机的线速度和角速度,以实现稳定的姿态控制。例如,在无人机巡检任务中,使用 Twist 消息控制无人机的运动,以实现精确的巡检操作。
- 路径跟踪:使用 Twist 消息控制无人机的线速度和角速度,以实现路径跟踪和导航。例如,在无人机导航任务中,使用 Twist 消息控制无人机的运动,以实现路径跟踪和避障。
- 悬停控制:使用 Twist 消息控制无人机的线速度和角速度,以实现稳定的悬停控制。例如,在无人机监控任务中,使用 Twist 消息控制无人机的运动,以实现稳定的悬停监控。
3. 机械臂运动控制
场景描述
在机械臂运动控制中,需要使用线速度和角速度来描述和控制机械臂末端执行器的运动状态。这对于实现机械臂在工作空间中的精确操作非常重要。
具体应用
- 抓取与放置:使用 Twist 消息控制机械臂末端执行器的线速度和角速度,以实现精确的抓取与放置操作。例如,在机器人装配任务中,使用 Twist 消息控制机械臂末端执行器的运动,以实现精确的装配操作。
- 路径规划:使用 Twist 消息控制机械臂末端执行器的线速度和角速度,以实现路径规划和运动控制。例如,在机器人焊接任务中,使用 Twist 消息控制机械臂末端执行器的运动,以实现精确的焊接操作。
- 避障控制:使用 Twist 消息控制机械臂末端执行器的线速度和角速度,以实现避障控制。例如,在机器人搬运任务中,使用 Twist 消息控制机械臂末端执行器的运动,以实现避障操作。
4. 自动驾驶车辆控制
场景描述
在自动驾驶车辆控制中,需要使用线速度和角速度来描述和控制车辆的运动状态。这对于实现自动驾驶车辆在复杂交通环境中的自主行驶和精确导航非常重要。
具体应用
- 路径跟踪:使用 Twist 消息控制自动驾驶车辆的线速度和角速度,以实现路径跟踪和导航。例如,在自动驾驶车辆导航任务中,使用 Twist 消息控制车辆的运动,以实现路径跟踪和避障。
- 车道保持:使用 Twist 消息控制自动驾驶车辆的线速度和角速度,以实现车道保持和稳定行驶。例如,在高速公路行驶任务中,使用 Twist 消息控制车辆的运动,以实现车道保持和稳定行驶。
- 停车控制:使用 Twist 消息控制自动驾驶车辆的线速度和角速度,以实现精确的停车控制。例如,在自动停车任务中,使用 Twist 消息控制车辆的运动,以实现精确的停车操作。
5. 机器人仿真
场景描述
在机器人仿真中,需要使用线速度和角速度来模拟机器人的运动状态。这有助于在虚拟环境中测试和验证控制算法和运动规划策略。
具体应用
- 物理引擎集成:将 Twist 消息集成到物理引擎(如Gazebo)中,模拟机器人的运动状态。例如,在机器人仿真环境中,使用 Twist 消息模拟机器人的运动,以测试控制算法的性能。
- 碰撞检测:使用 Twist 消息进行碰撞检测和响应,确保仿真环境中的物理交互真实可靠。例如,在机器人导航仿真中,使用 Twist 消息进行碰撞检测,以确保机器人能够避开障碍物。
- 性能评估:在仿真环境中评估机器人在不同任务和环境下的性能。例如,在机器人搬运任务中,使用 Twist 消息评估机器人的运动控制和稳定性。
6. 机器人传感器数据处理
场景描述
在机器人传感器数据处理中,需要使用线速度和角速度来描述和处理传感器数据中的运动信息。这对于提高机器人的感知能力和操作精度非常重要。
具体应用
- IMU数据处理:使用 Twist 消息描述和处理IMU(惯性测量单元)数据中的运动信息,实现精确的姿态估计。例如,在机器人导航任务中,使用 Twist 消息处理IMU数据,以提高导航精度。
- 视觉传感器数据处理:使用 Twist 消息描述和处理视觉传感器数据中的运动信息,实现精确的环境感知。例如,在机器人视觉任务中,使用 Twist 消息处理相机数据,以实现精确的物体识别和定位。
- 多传感器融合:在多传感器融合算法中,结合 Twist 消息描述的运动信息与其他传感器数据(如激光雷达、GPS),提供更准确的状态估计和环境感知。例如,在机器人导航任务中,使用多传感器融合算法提高导航精度。
定义
namespace geometry_msgs
{
namespace msg
{struct Twist
{geometry_msgs::msg::Vector3 linear;geometry_msgs::msg::Vector3 angular;
};} // namespace msg
} // namespace geometry_msgs
字段解释
- linear:包含线速度信息。
- x:沿 x 轴的线速度。
- y:沿 y 轴的线速度。
- z:沿 z 轴的线速度。
- angular:包含角速度信息。
- x:绕 x 轴的角速度。
- y:绕 y 轴的角速度。
- z:绕 z 轴的角速度。
案例
#include "rclcpp/rclcpp.hpp"
#include "geometry_msgs/msg/twist.hpp"class TwistPublisher : public rclcpp::Node
{
public:TwistPublisher() : Node("twist_publisher"){publisher_ = this->create_publisher<geometry_msgs::msg::Twist>("cmd_vel", 10);timer_ = this->create_wall_timer(500ms, std::bind(&TwistPublisher::publish_twist, this));}private:void publish_twist(){auto message = geometry_msgs::msg::Twist();message.linear.x = 1.0;message.linear.y = 0.0;message.linear.z = 0.0;message.angular.x = 0.0;message.angular.y = 0.0;message.angular.z = 0.5; // Rotate around z-axispublisher_->publish(message);}rclcpp::Publisher<geometry_msgs::msg::Twist>::SharedPtr publisher_;rclcpp::TimerBase::SharedPtr timer_;
};int main(int argc, char *argv[])
{rclcpp::init(argc, argv);rclcpp::spin(std::make_shared<TwistPublisher>());rclcpp::shutdown();return 0;
}
相关文章:

Robot Operating System——线速度和角速度
大纲 应用场景1. 移动机器人控制场景描述具体应用 2. 无人机控制场景描述具体应用 3. 机械臂运动控制场景描述具体应用 4. 自动驾驶车辆控制场景描述具体应用 5. 机器人仿真场景描述具体应用 6. 机器人传感器数据处理场景描述具体应用 定义字段解释 案例 geometry_msgs::msg::T…...

量化投资策略_因子打分选股的案例实现
一:因子打分选股的介绍 因子打分选股是一种量化投资策略,它通过选取多个与股票收益率相关的因子,对股票进行综合评分,然后根据评分来选择股票构建投资组合。以下是构建多因子打分选股模型的一般步骤: 数据预处理&…...

架构师知识梳理(七):软件工程-工程管理与开发模型
软件工程概述 软件开发生命周期 软件定义时期:包括可行性研究和详细需求分析过程,任务是确定软件开发工程必须完成的总目标,具体可分成问题定义、可行性研究、需求分析等。软件开发时期:就是软件的设计与实现,可分成…...

bp的模块被隐藏了
看我们现在没有代理那个模块了 我们点击查看 这里有被我们隐藏的模块,比如代理等,把前面的眼睛点一下 这个模块就出来了,如果想把他固定在任务栏里 拖动这个位置 就好了,如果有其他问题可以留言,看到可进我的努力给你…...
)
C++学习笔记(21)
243、条件变量-生产消费者模型 条件变量是一种线程同步机制。当条件不满足时,相关线程被一直阻塞,直到某种条件出现,这些线 程才会被唤醒。 C11 的条件变量提供了两个类: condition_variable:只支持与普通 mutex 搭配&…...

Ubuntu系统入门指南:常用命令详解
Ubuntu系统入门指南:常用命令详解 引言 Ubuntu是一个基于Linux内核的开源操作系统,由Canonical公司和社区共同开发和维护。它以易用性、稳定性和广泛的软件支持而著称,广泛应用于个人电脑、服务器和云计算环境。对于新手来说,掌…...

keep-alive缓存不了iframe
最近做了个项目,其中有个页面是由 iframe 嵌套了一个另外的页面,在运行的过程中发现 KeepAlive 并不生效,每次切换路由都会触发 iframe 页面的重新渲染,代码如下: <router-view v-slot"{ Component }">…...
Gradio快速部署构建AIGC的web应用 ,python
Gradio快速部署构建AIGC的web应用 ,python Gradio开源项目链接: https://github.com/gradio-app/gradiohttps://github.com/gradio-app/gradio (1)python的pip安装: pip install gradio (2)写…...

《职教论坛》
《职教论坛》投稿须知 《职教论坛》为全国中文核心期刊。为进一步提高期刊的规范化和标准化,也可使作者投搞有规可循,特对来稿提出如下要求: 一、稿件应有创新内容,应观点明确、资料准确、结构严谨、表述清楚、文字简明ÿ…...

JZ2440开发板——S3C2440的时钟体系
参考博客 (1)S3C2440-裸机篇-05 | S3C2440时钟体系详解(FCLK、PCLK、HCLK) 一、三种时钟(FCLK、HCLK、PCLK) 如下图所示,S3C2440的时钟控制逻辑,给整个芯片提供三种时钟࿱…...

[数据集][目标检测]男女性别检测数据集VOC+YOLO格式9769张2类别
数据集格式:Pascal VOC格式YOLO格式(不包含分割路径的txt文件,仅仅包含jpg图片以及对应的VOC格式xml文件和yolo格式txt文件) 图片数量(jpg文件个数):9769 标注数量(xml文件个数):9769 标注数量(txt文件个数):9769 标注…...

static 初始化报错
在 C 或 C 中,当你在函数中使用 static 关键字初始化一个局部变量时,编译器要求初始化器(initializer)是编译时常量。如果你尝试用动态计算的值初始化 static 变量(如函数参数或运行时生成的值),…...

3D Gaussian Splatting 论文学习
概述 目前比较常见的渲染方法大致可以分为2种: 将场景中的物体投影到渲染平面:传统的渲染管线就是这种方式,主要针对Mesh数据,可以将顶点直接投影成2D的形式,配合光栅化、深度测试、Alpha混合等就可以得到渲染的图像…...
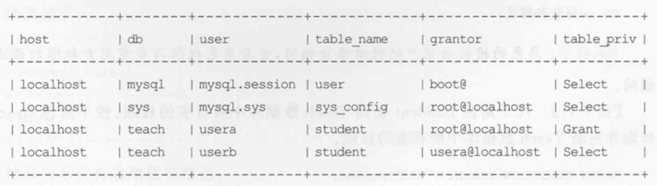
MySQL 安全机制全面解析
在如今的数字化时代,数据库安全 变得越来越重要。为了防止对数据库进行非法操作,MySQL 定义了一套完整的安全机制,包括用户管理、权限管理 和 角色管理。本文将为你深入浅出地介绍这三大安全机制,帮助你轻松掌握MySQL的安全管…...
研究new Vue()中的 initProvide)
vue原理分析(十四)研究new Vue()中的 initProvide
在Vue.prototype._init 中有一些init函数,今天我们来研究这些init函数 Vue.prototype._init function (options) {......{initProxy(vm);}......initLifecycle(vm);initEvents(vm);initRender(vm);callHook$1(vm, beforeCreate, undefined, false /* setContext *…...

Qt控制开发板的LED
Qt控制开发板的LED 使用开发板的IO接口进行控制是嵌入式中非常重要的一点,就像冯诺依曼原理说的一样,一个计算机最起码要有输入输出吧,我们有了信息的接收和处理,那我们就要有输出。 我们在开发板上一般都是使用开发板的GPIO接口…...

S3C2440开发板点亮LED灯+PWM定时器
目录 GPIO引脚和寄存器概述 点亮LED灯步骤 1.配置GPIO 2.点亮LED 设置引脚为输出 控制引脚电平 完整代码 PWM GPIO引脚和寄存器概述 GPIO端口: S3C2440的GPIO引脚可被配置为输入或输出(控制LED的引脚通常配置为输出模式)。寄存器&#…...
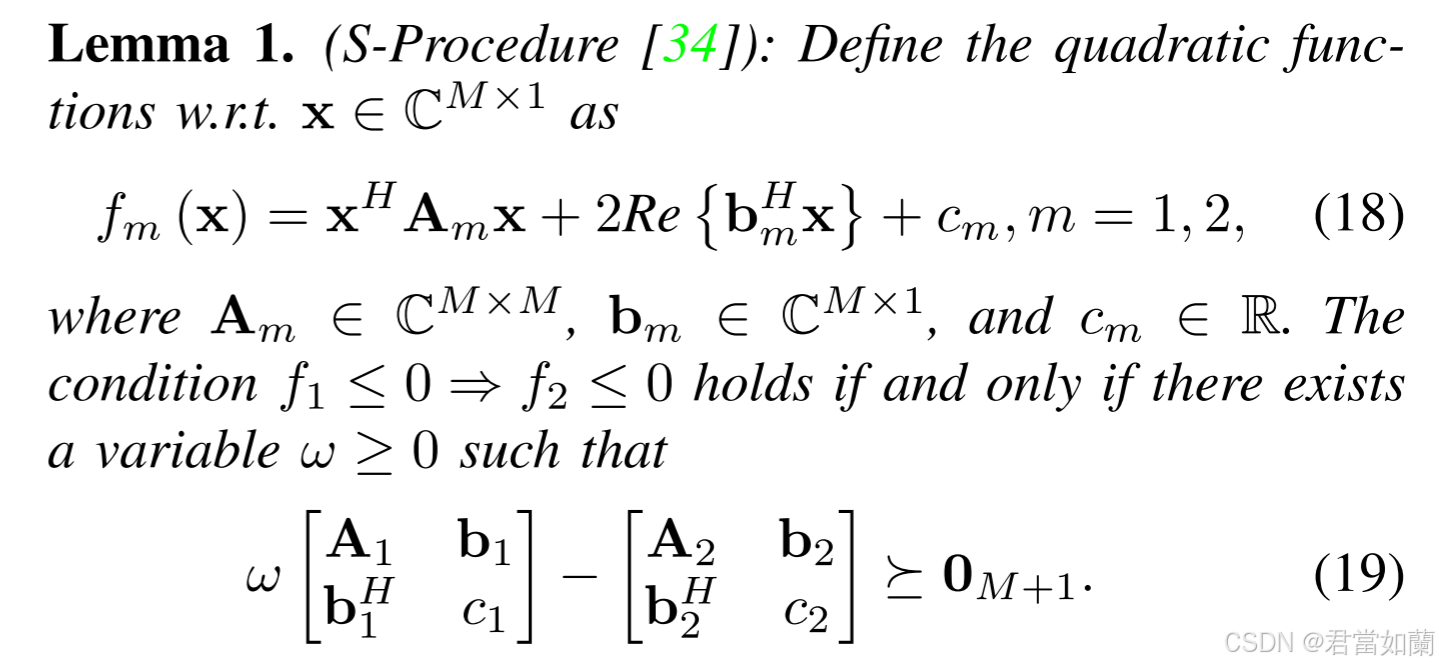
S-Procedure的基本形式及使用
理论 Lemma 1. ( S- Procedure[ 34] ) : Define the quadratic func- \textbf{Lemma 1. ( S- Procedure[ 34] ) : Define the quadratic func- } Lemma 1. ( S- Procedure[ 34] ) : Define the quadratic func- tions w.r.t. x ∈ C M 1 \mathbf{x}\in\mathbb{C}^M\times1 x…...

free -h 查看内存free空间不足
free空间不足 大部分被buff/cache占用 解决办法一: 手动释放缓存 释放页缓存 sudo sync; sudo sysctl -w vm.drop_caches1 释放目录项和inode缓存 sudo sync; sudo sysctl -w vm.drop_caches2 释放所有缓存(页缓存、目录项和inode缓存) sudo sync…...

rust学习笔记
参考资料:https://doc.rust-lang.org/book/ch01-02-hello-world.html 一、 编译与运行 在 Rust 中,编译和运行代码的常用命令是使用 cargo,这是 Rust 的包管理和构建工具。以下是使用 cargo 和 rustc(Rust 编译器)的具…...

开源自动化工具用例集:从网页监控到GUI自动化的实践指南
1. 项目概述:一个中文开源“利爪”用例集最近在整理一些自动化脚本和工具链时,我一直在思考一个问题:一个真正好用的、能解决实际问题的自动化工具,它的价值边界到底在哪里?是仅仅完成一个预设的、简单的任务ÿ…...

西安小程序制作优质服务推荐
在西安,小程序制作已成为众多企业实现数字化转型的核心一步。企业在这个领域的选择尤为重要,因为市场上的服务供应商数量庞大、难以判断其服务质量。因此专业背景、以往案例以及客户评价,这些都能够反映出公司的整体实力。还有,成…...

40希尔排序 - 以递减间距进行插入排序
希尔排序 - 以递减间距进行插入排序 040希尔排序:用长距离跳跃打破速度壁垒📰 5W1H 发明者故事 Who(何人)- 发明者是谁? 发明者:唐纳德希尔(Donald L. Shell) 背景:希尔…...

Zotero Format Metadata:让文献元数据格式化变得简单高效
Zotero Format Metadata:让文献元数据格式化变得简单高效 【免费下载链接】zotero-format-metadata Linter for Zotero. A plugin for Zotero to format item metadata. Shortcut to set title rich text; set journal abbreviations, university places, and item …...

【MQTT】paho.mqtt.c 库的“异步/同步模式选择、编译配置与实战” 深度解析,附嵌入式客户端开发指南
1. MQTT与paho.mqtt.c库的核心价值 在物联网设备通信领域,MQTT协议凭借其轻量级、低功耗和发布/订阅模式的优势,已经成为设备间通信的事实标准。而Eclipse Paho项目提供的paho.mqtt.c库,则是C语言开发者实现MQTT客户端功能的首选工具包。这个…...
——MS MARCO 实战指南)
IR 召回评测基准(英文数据集)——MS MARCO 实战指南
1. MS MARCO数据集全景解读 第一次接触MS MARCO时,我和大多数开发者一样困惑:这个号称"信息检索领域ImageNet"的数据集到底强在哪里?经过三个实际项目的验证,我发现它的价值在于完美复现了真实搜索场景的复杂性。想象你…...

TortoiseGit重置与还原功能详解:除了‘后悔药’,还能当‘时光机’和‘后悔药解药’?
TortoiseGit重置与还原功能深度解析:从版本控制到历史重构的艺术 在代码开发的漫长旅途中,每个开发者都曾有过"如果当时..."的瞬间。与大多数版本控制系统不同,Git提供的不仅是一个简单的"撤销"按钮,而是一套…...

MASA全家桶汉化包:三步搞定Minecraft模组界面中文化的终极指南
MASA全家桶汉化包:三步搞定Minecraft模组界面中文化的终极指南 【免费下载链接】masa-mods-chinese 一个masa mods的汉化资源包 项目地址: https://gitcode.com/gh_mirrors/ma/masa-mods-chinese 还在为Masa Mods复杂的英文界面而烦恼吗?MASA全家…...

【依赖冲突实战】Java NoSuchFieldError:从版本地狱到优雅解决
1. 当Java程序突然崩溃:NoSuchFieldError的典型症状 那天下午我正在调试一个微服务项目,突然控制台抛出个鲜红的异常: java.lang.NoSuchFieldError: MAX_RETRY_COUNT这个错误看似简单,却让我花了三小时才找到根源。项目里明明有MA…...

OmenSuperHub:惠普OMEN游戏本性能优化终极指南 - 完全免费开源解决方案
OmenSuperHub:惠普OMEN游戏本性能优化终极指南 - 完全免费开源解决方案 【免费下载链接】OmenSuperHub 使用 WMI BIOS控制性能和风扇速度,自动解除DB功耗限制。 项目地址: https://gitcode.com/gh_mirrors/om/OmenSuperHub 还在为惠普OMEN游戏本官…...