感知笔记1:ROS 视觉- 跟随红球
- 目录 -
- 如何在 ROS 中可视化 RGB 相机。
- 如何作为机器人切换主题。
- 如何创建 blob 检测器。
- 如何获取要跟踪的颜色的颜色编码。
- 如何使用 blob 检测数据并移动 RGB 相机以跟踪 blob。
机器人技术中最常见的传感器是不起眼的 RGB 摄像头。它用于从基本颜色跟踪(blob 跟踪)到人工智能 (AI) 自动驾驶等所有领域。因此,了解这种基本的感知传感器以及如何在 ROS 中使用它至关重要。
在本单元中,您将使用 ROS 中的摄像头,并以非常粗略但有效的方式使用 OpenCV 进行 blob 跟踪。在第 2 章中,您将更深入地了解如何进行 blob 跟踪以及如何处理图像。
1.1 机器人的第一张图像

1.2 Roll Pitch Yaw
让我们开始工作吧!在上图中,您会看到 Mira 在一个房间里,房间里有一个红色板球(red-harrow-robot)。
Mira 是一个 3 自由度机器人,它的头部可以进行Roll-Pitch-Yaw运动,这对于摄像机运动来说非常容易。它是这个图像介绍的完美机器人。

对于 Mira 来说,轴略有不同,更多的是机器人技术而不是航空航天技术(在航空航天技术中,它们是倒置的):

横滚轴运动:

俯仰轴运动:

偏航轴运动:

您还可以使用一个脚本来自动移动红色哈罗机器人。那么,让我们移动它吧。
rosrun teleop_twist_keyboard teleop_twist_keyboard.py cmd_vel:=/haro/cmd_vel您可以使用以下基本键盘命令移动球。

现在,您将看到 Mira 所看到的内容。您将使用名为 rqt_image_view 的 ROS 图形工具,该工具允许您查看机器人中的相机正在发布的内容。
要打开该工具,请输入以下内容:
rosrun rqt_image_view rqt_image_view屏幕上应会出现一个 rqt_image_view 应用程序窗口。
在应用程序中,选择 /mira/mira/camera1/image_raw 图像主题并等待几秒钟,直到图像源建立。您应该会看到类似于下图的内容。

1.3 颜色编码
现在,您将创建一个程序来跟踪图像中的色块。色块是图像中具有相似颜色编码的区域。第一步是获取定义要跟踪的对象的颜色编码。让我们用 red-haro-robot 来做这件事。
要获取颜色编码,我们将使用已安装的 Python 脚本,该脚本从相机接收图像并允许您移动滑块以获取所需的颜色编码值。
有两种不同的颜色编码:
RGB:它基于红-绿-蓝值的组合进行编码,范围从 0-255
HSV:它基于色相-饱和度-值进行编码,值在 0-255 之间。
我们将在这里使用 HSV,因为它往往对光照条件的变化更具鲁棒性。
在终端中启动以下命令并转到“图形界面”选项卡:
rosrun blob_tracking_v2 range_detector.py --filter HSV --preview这将启动类似以下的 GUI:
现在你必须移动滑块,直到预览中只有red-haro-robot。请参考以下结果:

效果最佳的值应类似于以下值:
H_MIN = 0
S_MIN = 234
V_MIN = 0
H_MAX = 0
S_MAX = 255
V_MAX = 255
1.4 创建 Blob 跟踪包
现在,让我们创建一个包来启动跟踪 red-haro-robot 所需的所有软件。
- 首先,创建一个名为 my_blob_tracking_pkg 的新包,它依赖于 rospy。
- 在该包中,我们将在脚本文件夹中创建所需的脚本以使其工作。
cd ~/catkin_ws/src
catkin_create_pkg my_blob_tracking_pkg rospy cv_bridge image_transport sensor_msgs
cd ~/catkin_ws/
catkin_make
source devel/setup.bash
rospack profile1.5 使用 OpenCV 开始 Blob 跟踪
要跟踪 blob,我们需要以下脚本:
- 访问 RGB 相机图像:mira_sensors.py
- 用于检测图像中 blob 的 blob 检测器:blob_detector.py
- 用于移动 Mira 头部的 blob 跟踪器:mira_follow_blob.py
roscd my_blob_tracking_pkg
mkdir scripts;cd scripts
# We create empty files
touch mira_sensors.py
touch blob_detector.py
touch mira_follow_blob.py
# We make all the python scripts executable
chmod +x *.pymira_sensors.py
#!/usr/bin/env pythonimport sys
import rospy
import cv2
import numpy as np
from cv_bridge import CvBridge, CvBridgeError
from geometry_msgs.msg import Twist
from sensor_msgs.msg import Imageclass MiraSensors(object):def __init__(self, show_raw_image=False):# 初始化MiraSensors类self._show_raw_image = show_raw_image # 是否显示原始图像self.bridge_object = CvBridge() # 创建CvBridge对象self.camera_topic = "/mira/mira/camera1/image_raw" # 摄像头话题self._check_cv_image_ready() # 检查CV图像是否准备好self.image_sub = rospy.Subscriber(self.camera_topic, Image, self.camera_callback) # 订阅摄像头图像话题def _check_cv_image_ready(self):self.cv_image = None # 初始化图像变量while self.cv_image is None and not rospy.is_shutdown():try:# 等待获取图像消息raw_cv_image = rospy.wait_for_message("/mira/mira/camera1/image_raw",
Image, timeout=1.0)
# 我们使用 cv_bridge,这是一个 ROS 包,可让您将 ROS 图像消息转换为 OpenCV 对象。这将打开 ROS 程序,以便使用 OpenCV 进行任何您想要的操作。然后,我们会保存最新的图像。self.cv_image = self.bridge_object.imgmsg_to_cv2(raw_cv_image, desired_encoding="bgr8") # 转换图像格式rospy.logdebug("Current " + self.camera_topic + " READY=>")except:# 如果获取图像失败,打印错误信息rospy.logerr("Current " + self.camera_topic + " not ready yet, retrying for getting " + self.camera_topic)return self.cv_imagedef camera_callback(self, data):try:# 选择bgr8编码,因为它是OpenCV默认编码self.cv_image = self.bridge_object.imgmsg_to_cv2(data, desired_encoding="bgr8") # 转换图像格式except CvBridgeError as e:print(e)if self._show_raw_image:# 如果需要,显示原始图像cv2.imshow("Image window", self.cv_image)cv2.waitKey(1)def get_image(self):# 这是用于访问相机上的最新图像的方法。return self.cv_image def main():mira_sensors_object = MiraSensors() # 创建MiraSensors对象rospy.init_node('mira_sensors_node', anonymous=True) # 初始化ROS节点try:rospy.spin() # 保持节点运行except KeyboardInterrupt:print("Shutting down")cv2.destroyAllWindows() # 关闭所有OpenCV窗口if __name__ == '__main__':main() # 运行主函数
blob_detector.py
#!/usr/bin/env python
# -*- coding: utf-8 -*-import rospy
import cv2
import numpy as np
from mira_sensors import MiraSensors
from geometry_msgs.msg import Pointclass BlobTracker(object):def __init__(self):self.point_blob_topic = "/blob/point_blob" # 定义发布的话题# 这个发布者使用Point消息发布# x,y: 检测到的blob中心相对于图像中心的相对位置# z: 检测到的blob的大小self.pub_blob = rospy.Publisher(self.point_blob_topic, Point, queue_size=1)def blob_detect(self,image, #-- 输入图像(cv标准)hsv_min, #-- HSV滤波的最小阈值 [h_min, s_min, v_min]hsv_max, #-- HSV滤波的最大阈值 [h_max, s_max, v_max]blur=0, #-- 模糊值(默认0)blob_params=None, #-- blob参数(默认None)search_window=None, #-- 搜索窗口 [x_min, y_min, x_max, y_max] 无量纲 (0.0到1.0),从左上角开始imshow=False):"""blob检测函数:返回关键点和反向掩码return keypoints, reversemask"""#-- 模糊图像以去除噪声if blur > 0: image = cv2.blur(image, (blur, blur))#-- 显示结果if imshow:cv2.imshow("Blur", image)cv2.waitKey(0)#-- 搜索窗口if search_window is None: search_window = [0.0, 0.0, 1.0, 1.0]#-- 将图像从BGR转换为HSVhsv = cv2.cvtColor(image, cv2.COLOR_BGR2HSV)#-- 应用HSV阈值mask = cv2.inRange(hsv, hsv_min, hsv_max)#-- 显示HSV掩码if imshow:cv2.imshow("HSV Mask", mask)#-- 膨胀使范围内区域更大mask = cv2.dilate(mask, None, iterations=2)#-- 显示膨胀后的掩码if imshow:cv2.imshow("Dilate Mask", mask) cv2.waitKey(0)mask = cv2.erode(mask, None, iterations=2)#-- 显示腐蚀后的掩码if imshow:cv2.imshow("Erode Mask", mask)cv2.waitKey(0)#-- 使用搜索掩码裁剪图像mask = self.apply_search_window(mask, search_window)if imshow:cv2.imshow("Searching Mask", mask)cv2.waitKey(0)#-- 如果没有提供blob检测参数,则构建默认参数if blob_params is None:# 设置SimpleBlobDetector的默认参数params = cv2.SimpleBlobDetector_Params()# 修改阈值params.minThreshold = 0params.maxThreshold = 100# 按区域过滤params.filterByArea = Trueparams.minArea = 30params.maxArea = 20000# 按圆形度过滤params.filterByCircularity = Falseparams.minCircularity = 0.1# 按凸性过滤params.filterByConvexity = Falseparams.minConvexity = 0.5# 按惯性过滤params.filterByInertia = Trueparams.minInertiaRatio = 0.5else:params = blob_params #-- 应用blob检测detector = cv2.SimpleBlobDetector_create(params)# 反转掩码:blob在白色上是黑色的reversemask = 255 - maskif imshow:cv2.imshow("Reverse Mask", reversemask)cv2.waitKey(0)keypoints = detector.detect(reversemask)return keypoints, reversemaskdef draw_keypoints(self,image, #-- 输入图像keypoints, #-- CV关键点line_color=(0, 255, 0), #-- 线的颜色 (b,g,r)imshow=False #-- 显示结果):"""绘制检测到的blob:返回图像return(im_with_keypoints)"""#-- 将检测到的blob绘制为绿色圆圈#-- cv2.DRAW_MATCHES_FLAGS_DRAW_RICH_KEYPOINTS 确保圆圈的大小与blob的大小相对应im_with_keypoints = cv2.drawKeypoints(image, keypoints, np.array([]), line_color, cv2.DRAW_MATCHES_FLAGS_DRAW_RICH_KEYPOINTS)if imshow:# 显示关键点cv2.imshow("Keypoints", im_with_keypoints)return im_with_keypointsdef draw_window(self,image, #-- 输入图像window_adim, #-- 窗口的无量纲单位color=(255, 0, 0), #-- 线的颜色line=5, #-- 线的厚度imshow=False #-- 显示图像):"""绘制搜索窗口:返回图像return(image)"""rows = image.shape[0]cols = image.shape[1]x_min_px = int(cols * window_adim[0])y_min_px = int(rows * window_adim[1])x_max_px = int(cols * window_adim[2])y_max_px = int(rows * window_adim[3]) #-- 从左上角绘制一个矩形到右下角image = cv2.rectangle(image, (x_min_px, y_min_px), (x_max_px, y_max_px), color, line)if imshow:# 显示关键点cv2.imshow("Keypoints", image)return imagedef draw_frame(self,image,dimension=0.3, #-- 相对于框架大小的维度line=2 #-- 线的厚度):"""绘制X Y坐标系return : image"""rows = image.shape[0]cols = image.shape[1]size = min([rows, cols])center_x = int(cols / 2.0)center_y = int(rows / 2.0)line_length = int(size * dimension)#-- 绘制X轴image = cv2.line(image, (center_x, center_y), (center_x + line_length, center_y), (0, 0, 255), line)#-- 绘制Y轴image = cv2.line(image, (center_x, center_y), (center_x, center_y + line_length), (0, 255, 0), line)return imagedef apply_search_window(self, image, window_adim=[0.0, 0.0, 1.0, 1.0]):"""应用搜索窗口return: image"""rows = image.shape[0]cols = image.shape[1]x_min_px = int(cols * window_adim[0])y_min_px = int(rows * window_adim[1])x_max_px = int(cols * window_adim[2])y_max_px = int(rows * window_adim[3]) #--- 初始化掩码为黑色图像mask = np.zeros(image.shape, np.uint8)#--- 复制原图像中对应于窗口的像素mask[y_min_px:y_max_px, x_min_px:x_max_px] = image[y_min_px:y_max_px, x_min_px:x_max_px] #--- 返回掩码return maskdef blur_outside(self, image, blur=5, window_adim=[0.0, 0.0, 1.0, 1.0]):"""对搜索区域外部应用模糊"""rows = image.shape[0]cols = image.shape[1]x_min_px = int(cols * window_adim[0])y_min_px = int(rows * window_adim[1])x_max_px = int(cols * window_adim[2])y_max_px = int(rows * window_adim[3]) # 初始化掩码为黑色图像mask = cv2.blur(image, (blur, blur))# 复制原图像中对应于窗口的像素mask[y_min_px:y_max_px, x_min_px:x_max_px] = image[y_min_px:y_max_px, x_min_px:x_max_px] return maskdef get_blob_relative_position(self, image, keyPoint):"""获取单个关键点的相机相对框架坐标return(x,y)"""rows = float(image.shape[0])cols = float(image.shape[1])center_x = 0.5 * colscenter_y = 0.5 * rowsx = (keyPoint.pt[0] - center_x) / (center_x)y = (keyPoint.pt[1] - center_y) / (center_y)return x, ydef publish_blob(self, x, y, size):blob_point = Point()blob_point.x = xblob_point.y = yblob_point.z = size self.pub_blob.publish(blob_point)if __name__ == "__main__":rospy.init_node("blob_detector_node", log_level=rospy.DEBUG) # 初始化节点mira_sensors_obj = MiraSensors() # 创建MiraSensors对象cv_image = mira_sensors_obj.get_image() # 获取图像blob_detector_object = BlobTracker() # 创建BlobTracker对象# 红色Haro的HSV限制hsv_min = (0, 234, 0)hsv_max = (0, 255, 255) # 定义检测区域 [x_min, y_min, x_max, y_max] 无量纲 (0.0到1.0),从左上角开始window = [0.0, 0.0, 1.0, 0.9]while not rospy.is_shutdown():# 获取最新图像cv_image = mira_sensors_obj.get_image()# 检测blobkeypoints, _ = blob_detector_object.blob_detect(cv_image, hsv_min, hsv_max, blur=3, blob_params=None, search_window=window, imshow=False)# 绘制检测区域窗口cv_image = blob_detector_object.draw_window(cv_image, window)for keypoint in keypoints:x, y = blob_detector_object.get_blob_relative_position(cv_image, keypoint)blob_size = keypoint.sizeblob_detector_object.publish_blob(x, y, blob_size)# 绘制检测结果blob_detector_object.draw_keypoints(cv_image, keypoints, imshow=True)#-- 按q键退出if cv2.waitKey(1) & 0xFF == ord('q'):breakrospy.logwarn("Shutting down") cv2.destroyAllWindows() # 关闭所有OpenCV窗口将斑点检测发布到主题 /blob/point_blob 中。我们不会深入讨论 OpenCV 的细节。我们只会介绍如何使用它并适应不同的颜色斑点:
mira_sensors_obj = MiraSensors()
cv_image = mira_sensors_obj.get_image()使用之前创建的类来访问 RGB 相机记录的图像。
- 这是一个例子。值可以变化:图像的最小值为 225,但我们将其设置为 234。重要的是它适合您。

# HSV limits for RED Haro
hsv_min = (0,234,0)
hsv_max = (0, 255, 255) # We define the detection area [x_min, y_min, x_max, y_max] adimensional (0.0 to 1.0) starting from top left corner
window = [0.0, 0.0, 1.0, 0.9]定义我们之前为跟踪红色哈罗机器人而进行的 HSV 编码的限制。如果您想跟踪其他颜色,可以在此处进行更改。
我们还为检测定义了一个窗口。这通常用于性能目的。它使用与人眼相同的技巧。眼睛的中心比眼睛的其余部分具有更多的定义,这允许更快的处理。这里也是一样。我们必须处理更少的图像,因此我们可以更快地检测。这对于机器人所需的半实时性至关重要。
# Detect blobs
keypoints, _ = blob_detector_object.blob_detect(cv_image, hsv_min, hsv_max, blur=3, blob_params=None, search_window=window, imshow=False)
# Draw window where we make detections
cv_image = blob_detector_object.draw_window(cv_image, window)for keypoint in keypoints:x , y = blob_detector_object.get_blob_relative_position(cv_image, keypoint)blob_size = keypoint.sizeblob_detector_object.publish_blob(x,y,blob_size)# Draw Detection
blob_detector_object.draw_keypoints(cv_image, keypoints, imshow=True)然后,我们进行斑点检测,并在原始图像、窗口和边界框上绘图,以检测斑点。
blob_detector_object.publish_blob(x,y,blob_size)将检测结果发布到 /blob/point_blob 主题,下一个脚本将使用该主题来移动 Mira 的头部以跟随检测到的斑点。这些示例中未使用斑点的大小,但可以使用它来很好地估计与物体的距离。
mira_follow_blob.py
#!/usr/bin/env python
import time
import rospy
from math import pi, sin, cos, acos
import random
from std_msgs.msg import Float64
from sensor_msgs.msg import JointState
from geometry_msgs.msg import Twist
from geometry_msgs.msg import Point"""
Topics To Write on:
type: std_msgs/Float64
/mira/pitch_joint_position_controller/command
/mira/roll_joint_position_controller/command
/mira/yaw_joint_position_controller/command
"""class MiraBlobFollower(object):def __init__(self, is_2D = True):rospy.loginfo("Mira Initialising Blob Follower...")self.move_rate = rospy.Rate(10)self._is_2D = is_2Dself.acceptable_error = 0.2self.current_yaw = 0.0self.twist_obj = Twist()self.pub_mira_move = rospy.Publisher('/mira/commands/velocity', Twist, queue_size=1)self.point_blob_topic = "/blob/point_blob"self._check_cv_image_ready()rospy.Subscriber(self.point_blob_topic, Point, self.point_blob_callback)rospy.loginfo("Mira Initialising Blob Follower...")def _check_cv_image_ready(self):self.point_blob = Nonewhile self.point_blob is None and not rospy.is_shutdown():try:self.point_blob = rospy.wait_for_message(self.point_blob_topic, Point, timeout=1.0)rospy.logdebug("Current "+self.point_blob_topic+" READY=>")except:rospy.logerr("Current "+self.point_blob_topic+" not ready yet, retrying for getting "+self.point_blob_topic+"")return self.point_blobdef point_blob_callback(self, msg):if msg.x > self.acceptable_error:self.twist_obj.angular.z = -1.0elif msg.x < -1*self.acceptable_error:self.twist_obj.angular.z = 1.0else:self.twist_obj.angular.z = 0.0if msg.y > self.acceptable_error:self.twist_obj.angular.x = - 1.0elif msg.y < -1*self.acceptable_error:self.twist_obj.angular.x = 1.0else:self.twist_obj.angular.x = 0.0def loop(self):while not rospy.is_shutdown():self.pub_mira_move.publish(self.twist_obj)self.move_rate.sleep()if __name__ == "__main__":rospy.init_node('mira_follow_blob_node', anonymous=True, log_level=rospy.DEBUG)mira_jointmover_object = MiraBlobFollower()mira_jointmover_object.loop()最后一个脚本获取 blob 检测并相应地移动 Mira 的头部。 Mira 有一个名为 /mira/commands/velocity 的主题。根据发布的 Twist 消息,机器人将移动其头部。
在这种情况下:
- 在 angular.x 中发布速度:移动滚动轴。发布正值:将头部向上移动。负值 >> 向下。
- 在 angular.z 中发布速度:移动偏航轴。发布正值:将头部向左转。负值 >> 向右转。
1.6 启动并测试 Blob 跟踪器
现在是时候看看它的实际效果了。启动 blob_tracker.py。
rosrun my_blob_tracking_pkg blob_detector.py通过单击图形界面图标打开图形界面,这样您就可以看到斑点检测:

在第二个终端中,启动 red-haro-robot的遥控操作,并移动它,以便 Mira 可以看到它。
rosrun teleop_twist_keyboard teleop_twist_keyboard.py cmd_vel:=/haro/cmd_vel检查 blob 主题信息:
rostopic list | grep /blob/point_blob
rostopic echo /blob/point_blob观察距离越大尺寸越小的情况。观察 x 和 y 如何根据位置变化。注意 x 和 y 位置的值是相对于图像中心的。

太棒了!现在让我们运行 mira_follow_blob.py 并看看它的表现如何:
rosrun my_blob_tracking_pkg mira_follow_blob.pyMira 现在应该跟随red-haro-robot,从左到右,从上到下。请注意,机器人在关节处有物理限制,无法跟随red-haro-robot到处移动。
相关文章:
感知笔记1:ROS 视觉- 跟随红球
- 目录 - 如何在 ROS 中可视化 RGB 相机。如何作为机器人切换主题。如何创建 blob 检测器。如何获取要跟踪的颜色的颜色编码。如何使用 blob 检测数据并移动 RGB 相机以跟踪 blob。 机器人技术中最常见的传感器是不起眼的 RGB 摄像头。它用于从基本颜色跟踪(blob 跟…...

JAVA多线程机制
JAVA多线程的实现 JAVA有两种方法创建线程 (1)继承Thread类 (2)实现Runnable接口 这两种方法都要用到Thread类以及相关方法 Thread类 是一个具体的类,不是抽象类,封装了线程的行为 利用Thread类创建一个…...

Element-plus安装及其基础组件使用
简而言之,在main.js中导出以下库,仅此,搞多了出错难排查 import ElementPlus from element-plus //导入ElementPlus 模块 import element-plus/dist/index.css //引入样式 app.use(ElementPlus) //注册库就能使用了 Element Plus 是一个基于 Vue 3 的组件…...

[产品管理-38]:创意、市场机会、商业可行性的区别
创意、市场机会和商业可行性在创业和商业活动中各自扮演着不同的角色,它们之间既有区别又相互联系。以下是对这三者区别的详细阐述: 产品创意:新颖打破常规、解决的实际问题、满足的客户需求 定义:创意是创造意识或创新意识的简…...
开源标注工具
DoTAT https://github.com/FXLP/MarkTool 后端代码未开放,可能有数据泄露风险 Chinese-Annotator https://github.com/deepwel/Chinese-Annotator 安装非常麻烦,github更新频率比较低,支持功能和doccano类似 IEPY https://github.com/ma…...

数据结构讲解二叉树 【一】
🎁🎁创作不易,关注作者不迷路🎀🎀 C语言二叉树 【一】 前言一、数概念及结构1.数的概念1.2树的相关概念1.3树的表示 二、二叉树的概念及结构2.12.2二叉树的性质2.3二叉树的存储结构 三、二叉树的顺序结构实现3.1二叉树…...

MATLAB基础应用精讲-【数模应用】OR值
目录 前言 几个高频面试题目 or值越小代表什么 RR值、OR值及HR值的区别 算法原理 什么是OR值 OR值的计算方法和含义 注意事项 SPSSAU OR值和RR值 1、背景 2、理论 3、操作 4、SPSSAU 输出结果 5、文字分析 6、剖析 疑难解惑 SE(ln(OR)或SE(ln(RR)的意义? …...
[vulnhub] w1r3s.v1.0
https://www.vulnhub.com/entry/w1r3s-101,220/ 思路:红队笔记 主机发现端口扫描 使用nmap扫描网段类存活主机 因为靶机是我最后添加的,所以靶机IP是133 nmap -sP 192.168.75.0/24 // Starting Nmap 7.93 ( https://nmap.org ) at 2024-09-20 09:09 CST…...

c#中的功能优势
装箱和拆箱 性能消耗的直接体现 int iterations 10000000; // 进行一千万次迭代Stopwatch stopwatch new Stopwatch();// 非装箱测试stopwatch.Start();for (int i 0; i < iterations; i){int x i; // 纯值类型操作,无装箱}stopwatch.Stop();Console.Writ…...
Windows系统设置定时任务,周期性执行.bat文件
通过.bat清除注册表项 在 Windows 系统中,.bat 文件(批处理文件)是一个包含一系列命令的文本文件。这些命令会被 Windows 命令解释器 (cmd.exe) 依次执行。 你可以把它想象成一个简单的程序,但它不像 C 或 Python 那样需要编译&a…...

xQTLs 共定位分析(XQTLbiolinks包)
XQTL 共定位分析 XQTLbiolinks 是一个端到端的生物信息学工具,由深圳湾实验室李磊研究团队开发,用于高效地分析公共或用户定制的个xQTLs数据。该软件提供了一个通过与 xQTLs 共定位分析进行疾病靶基因发现的流程,以检测易感基因和致病变异。…...
)
网络工程(学习记录)
day1创建Vlan Switch>enable Switch#configure terminal Switch(config)#hostname SW1 修改名称为SW1 SW1(config)# SW1(config)#vlan 10 创建vlan10 SW1(config-vlan)#vlan 20 SW1(config)#interface f0/1 进入接口f0…...

全志A133 android10 适配EC20 4G模块
一,移植适配 1. 驱动移植 代码路径:longan/kernel/linux-4.9/drivers/usb/serial/option.c diff --git a/drivers/usb/serial/option.c b/drivers/usb/serial/option.c index 9f96dd2..2f25466 100644 --- a/drivers/usb/serial/option.cb/drivers/us…...
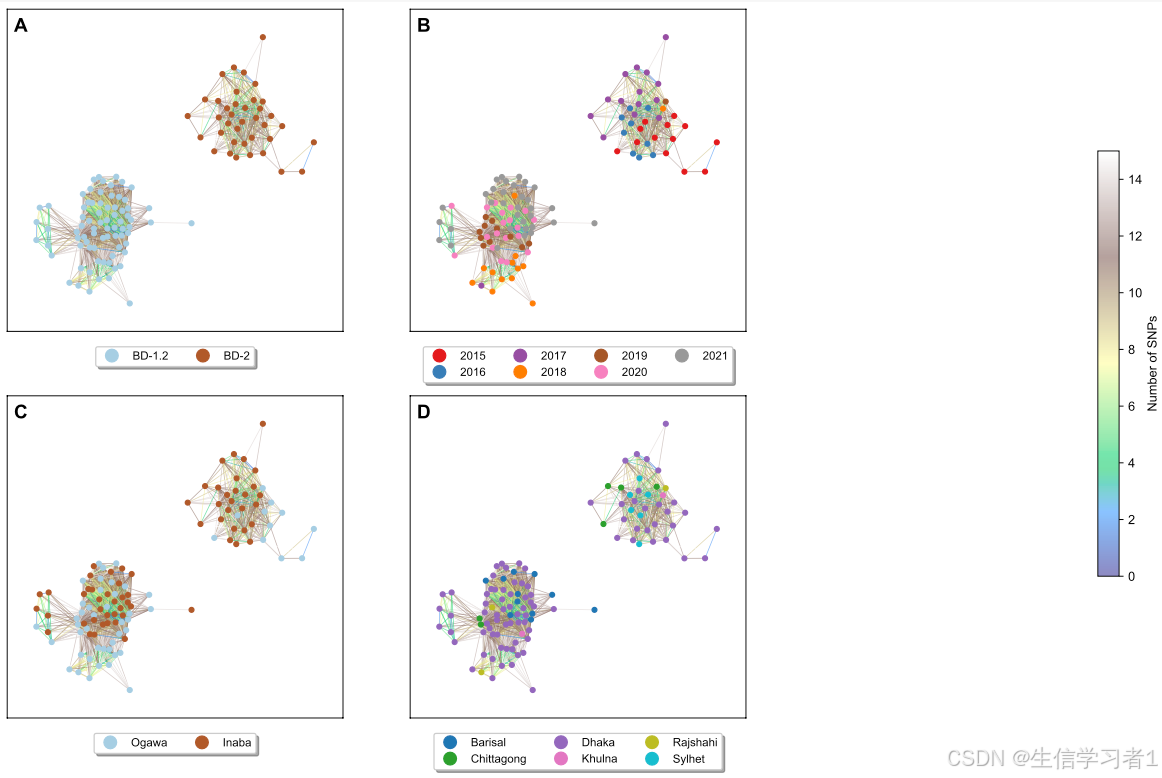
数据分析:Python语言网络图绘制
文章目录 介绍加载R包类别导入数据下载数据画图介绍 网络图是一种图形表示法,用于展示实体之间的关系。在不同的领域中,网络图有着不同的含义和用途:在生物学中,网络图可以用来表示生物分子之间的相互作用,如蛋白质相互作用网络。 加载R包 import pandas as pd import …...
使用ChatGPT引导批判性思维,提升论文的逻辑与说服力的全过程
学境思源,一键生成论文初稿: AcademicIdeas - 学境思源AI论文写作 批判性分析(Critical Analysis) 是论文写作中提升质量和说服力的重要工具。它不仅帮助作者深入理解和评价已有研究,还能指导作者在构建自己论点时更加…...
)
vue限定类型上传文件 最简单实践(单个可文件、可图片)
这个是为了文件导入弄的,内部运维人员使用的 目前还没做删除文件的交互 <el-uploadclass"upload-demo"ref"upload":before-upload"handleBeforeUpload"action"#"accept".xls,.xlsx":limit"1">&l…...

【GUI设计】基于图像分割和边缘算法的GUI系统(7),matlab实现
博主简介: 如需获取设计的完整源代码或者有matlab图像代码项目需求/合作,可联系主页个人简介提供的联系方式或者文末的二维码。 ~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~ 本次案例是基于图像分割和边缘算法的GUI系统…...
未来之窗VOS编程工具让你的工作效率翻倍———未来之窗行业应用跨平台架构
未来之窗编程工具概述 平板电脑/手机用于编程具有诸多优点。其便携性强,方便随时随地开展工作。触摸操作直观便捷,长续航能满足长时间需求,启动迅速。支持手写绘图,利于表达想法。能集成多种编程工具,还便于通过云服务…...
分布式数据库——HBase基本操作
启动HBase: 1.启动hadoop,进入hadoop的sbin中 cd /opt/hadoop/sbin/ 2.初始化namenode hdfs namenode -format 3.启动hdfs ./start-all.sh 4.启动hbase cd /opt/hbase/bin ./start-hbase.sh 5.使用jps查看进程 jps 以下图片则是hbase启动成功~ 运行HBase ./hbase sh…...

Go语言并发编程中的超时与取消机制解析
解锁Python编程的无限可能:《奇妙的Python》带你漫游代码世界 并发编程是Go语言的核心优势之一,而在实际应用中,超时和取消操作会频繁出现。超时机制能够帮助我们理解系统行为,防止系统因为某些任务执行过长而陷入困境。与此同时,取消操作则是应对超时的一种自然反应。此…...
分布图)
LingBot-Depth效果实测:与传感器原生深度对比的绝对误差(mm)分布图
LingBot-Depth效果实测:与传感器原生深度对比的绝对误差(mm)分布图 1. 引言:当深度图遇上“脑补”大师 想象一下,你手里有一张用深度相机拍出来的照片,它告诉你每个像素离相机有多远。但问题是࿰…...

如何用Wi-Fi信号实现非接触检测:ESP-CSI完整指南
如何用Wi-Fi信号实现非接触检测:ESP-CSI完整指南 【免费下载链接】esp-csi Applications based on Wi-Fi CSI (Channel state information), such as indoor positioning, human detection 项目地址: https://gitcode.com/GitHub_Trending/es/esp-csi 想要让…...

云计算算力价格波动:行业重构与竞争新格局
云计算价格反转:从价格战到集体涨价2025年4月,阿里云率先发起价格战,京东云、腾讯云、华为云等纷纷跟进,“最高降幅达60%”的口号让行业陷入价格混战。然而,到了2026年3月,市场风向突变,谷歌云、…...
)
用STM32和示波器搞定美的/格力空调红外遥控(附完整C代码)
STM32实战:从示波器捕获到空调红外协议逆向全解析 红外遥控技术看似简单,却蕴含着精妙的时序设计和协议逻辑。作为一名长期混迹于硬件开发领域的工程师,我经常遇到需要逆向控制家电的场景。最近在智能家居项目中,就遇到了需要通过…...

如何通过WeChatMsg实现微信聊天记录永久保存:从数据安全到情感记忆的完整解决方案
如何通过WeChatMsg实现微信聊天记录永久保存:从数据安全到情感记忆的完整解决方案 【免费下载链接】WeChatMsg 提取微信聊天记录,将其导出成HTML、Word、CSV文档永久保存,对聊天记录进行分析生成年度聊天报告 项目地址: https://gitcode.co…...
)
手把手教你用PyTorch 2.0复现风源AI气象模型(附GitHub源码解读)
手把手教你用PyTorch 2.0复现风源AI气象模型(附GitHub源码解读) 气象预测正经历从传统数值模拟到AI驱动的范式转移。本文将带您深入风源模型的技术内核——一个融合卫星遥感与深度学习的混合架构,通过PyTorch 2.0实现从数据预处理到模型推理的…...

STM32 SRAM调试实战与优化技巧
1. STM32 SRAM调试实战指南在嵌入式开发中,我们通常将程序烧录到Flash中运行。但当你需要快速验证代码、调试硬件问题或进行临时测试时,使用STM32内部SRAM运行程序会是个高效的选择。我最近在调试一个LED控制程序时,就采用了SRAM运行的方式&a…...

MATLAB实战:如何用三种噪声干扰模拟器提升脉冲雷达抗干扰能力
MATLAB实战:三种噪声干扰模拟器在脉冲雷达抗干扰测试中的应用 雷达系统在现代电子战中扮演着关键角色,而抗干扰能力是评估雷达性能的重要指标。本文将深入探讨如何利用MATLAB构建射频噪声、调幅噪声和调频噪声三种干扰模拟器,通过完整的代码实…...
万象视界灵坛基础教程:PyTorch+Transformers环境搭建与CLIP零样本推理入门
万象视界灵坛基础教程:PyTorchTransformers环境搭建与CLIP零样本推理入门 1. 环境准备与快速部署 1.1 系统要求 Python 3.8或更高版本支持CUDA的NVIDIA GPU(推荐)至少8GB显存(CLIP-ViT-L/14模型需求)10GB以上可用磁…...

手把手教你给51单片机项目“瘦身”:多传感器数据采集与显示的优化技巧
51单片机多传感器系统优化实战:从臃肿代码到高效工程的蜕变之路 当你的51单片机项目开始集成第三个、第四个传感器时,是否发现代码变得越来越难以维护?LCD显示刷新变得卡顿,传感器数据互相干扰,甚至整个系统会莫名其妙…...