蓝桥杯【物联网】零基础到国奖之路:十七. 扩展模块之单路ADC和NE555
蓝桥杯【物联网】零基础到国奖之路:十七. 扩展模块之单路ADC和NE555
- 第一节 硬件解读
- 第二节 CubeMx配置
- 第三节 代码
- 1,脉冲部分代码
- 2,ADC部分代码
第一节 硬件解读

PR1为ADC,本次重点为PR3,和PR3在一起的模块为NE555。
NE555是一款产生高精度定时脉冲的双极性集成电路。可以通过外接少量的阻容器件,组成定时触发电路等电路。
第二节 CubeMx配置
引脚对应:
PB1-ADC(PR1)
PB0-PLUS(PR3)
PB6-LED2
PB7-LED1

配置PB0为TIM3_CH3,PB1为ADC_IN9。
配置TIM3时钟源为Internal clock,channel3为直接输入捕获模式。分频为32-1,开启auto-reload preload。之后在NVIC打开TIM3的中断设置优先级为1。

第三节 代码
1,脉冲部分代码
脉冲模块,介绍下定时器捕获模式的方法;首先在“1”设置为上升沿捕获,目的为了检测即将到来的上升沿;然后,在“2”处检测到了上升沿,捕获此状态并记录此时计时器的值;接下来在“3”设置为下降沿捕获,目的是为了检测即将到来的下降沿;之后在“4”处检测到了波形的下降沿,捕获此状态并记录此时计时器的值;计算时间,两次计数器的值之差就是这个高电平的脉宽,进而可以得出高电平时间。

一,定义全局变量

外部声明变量

找到HAL_TIM_IC_CaptureCallbark()中断编写代码。

在main函数编写捕获周期频率的代码。

不用忘记开启TIM3CH3。

2,ADC部分代码
获取后直接打印。

相关文章:
蓝桥杯【物联网】零基础到国奖之路:十七. 扩展模块之单路ADC和NE555
蓝桥杯【物联网】零基础到国奖之路:十七. 扩展模块之单路ADC和NE555 第一节 硬件解读第二节 CubeMx配置第三节 代码1,脉冲部分代码2,ADC部分代码 第一节 …...

SolveigMM Video Splitter方便快捷视频分割合并软件 V3.6.1309.3-供大家学习研究参考
视频分割功能(Splitter)支持各种编码格式的AVI(DivX、DV、MJPEG、XVID、MPEG-4)、WMV、ASF(DivX、MJPEG、XVID、MPEG-4、WM Video 7/9)F、MPEG(*.mpg、*.mpeg、*.mpv、*.m2v、*.vob)文件、也支持受损的WMV、ASF格式的分割。视频合并功能(Joiner)则支持AVI、WMV/ASF、WMA、MP3、…...

Unity3D 创建一个人物,实现人物的移动
1,创建项目 首先打开我们的Unity Hub 在我们的编译器下面新建项目,选择3D模板,更改一下我们的项目名称,选择一下路径,然后点击创建项目 等待项目创建。。。。。。 我们在项目里先创建一个plane,这样有点视…...

【笔记】数据结构12
文章目录 2013年408应用题41方法一方法二 看到的社区的一个知识总结,这里记录一下。 知识点汇总 2013年408应用题41 解决方法: 方法一 (1)算法思想 算法的策略是从前向后扫描数组元素,标记出一个可能成为主元素的元…...

django的URL配置
1 django如何处理一个请求 首先Django要使用根URLconf模块,通过setting.py配置文件的ROOT_URLCONF来设置。 加载该模块后并查找变量 urlpatterns。这是一个Python的django.conf.urls.url()实例列表。 Django按顺序运行每个URL模式,并在匹配所请求的…...

精华帖分享 | 因子构建思考1
本文来源于量化小论坛股票量化板块精华帖,作者为z-coffee。 以下为精华帖正文: 一段时间没写帖子,其实一直在研究策略,只是从不同的角度去思考而已。熟悉我的老板其实清楚,我的炉子水平一般,基本不太依托…...
)
kubernetes笔记(四)
一、Pod调度策略 1.基于节点的调度 spec->nodeName [rootmaster ~]# vim myhttp.yaml --- kind: Pod apiVersion: v1 metadata:name: myhttp spec:nodeName: node-0001 # 基于节点名称进行调度containers:- name: apacheimage: myos:httpd[rootmaster ~]# kubectl a…...

通信工程学习:什么是SNMP简单网络管理协议
SNMP:简单网络管理协议 SNMP(Simple Network Management Protocol,简单网络管理协议)是一种用于在计算机网络中管理网络节点(如服务器、工作站、路由器、交换机等)的标准协议。它属于OSI模型的应用层&#…...

ubuntu20.04系统下,c++图形库Matplot++配置
linux下安装c图形库Matplot,使得c可以可视化编程;安装Matplot之前,需要先安装一个gnuplot,因为Matplot是依赖于此库 gnuplot下载链接: http://www.gnuplot.info/ 一、gnuplot下载与安装(可以跳过,下面源码…...

[激光原理与应用-126]:南京科耐激光-激光焊接 - 焊中无损检测技术 - 智能制程监测系统IPM介绍 - 26- 频域分析法
目录 一、什么是频域分析法 1、定义 2、基本原理 3、分析步骤 4、应用领域 5、优缺点 二、频域分析法在激光焊接故障监测中的应用 2.1 概述 1、应用背景 2、频域分析法的应用 3、应用优势 4、应用实例 2.2 激光焊接故障检测中光电信号的频谱特征 1、光电信号分类…...
:功能、应用与最佳实践)
深入理解 Solidity 修饰符(Modifier):功能、应用与最佳实践
1. 什么是修饰符(Modifier)? 1.1 修饰符的定义 在 Solidity 中,修饰符(Modifier)是一种用于更改函数行为的关键字。它们可以用于控制函数的执行条件、添加前置检查、简化重复逻辑等。修饰符在函数执行之前…...

YOLO11项目实战1:道路缺陷检测系统设计【Python源码+数据集+运行演示】
一、项目背景 随着城市化进程的加速和交通网络的不断扩展,道路维护成为城市管理中的一个重要环节。道路缺陷(如裂缝、坑洞、路面破损等)不仅影响行车安全,还会增加车辆的磨损和维修成本。传统的道路缺陷检测方法主要依赖人工巡检…...

怎么屏蔽统计系统统计到的虚假ip
屏蔽统计系统中的虚假IP是保护网站分析数据准确性的重要措施。以下是一些有效的策略和步骤,可以帮助您过滤掉虚假IP: 1. 识别虚假IP的特征 了解虚假IP的常见特征可以帮助您识别和屏蔽它们: 短时间内高频率访问:虚假IP可能会在短…...

前端开发设计模式——策略模式
目录 一、策略模式的定义和特点 1.定义: 2.特点: 二、策略模式的实现方式 1.定义策略接口: 2.创建具体策略类: 3.定义上下文类: 三、策略模式的应用场景 1.表单验证场景: 2.动画效果切换场景&…...
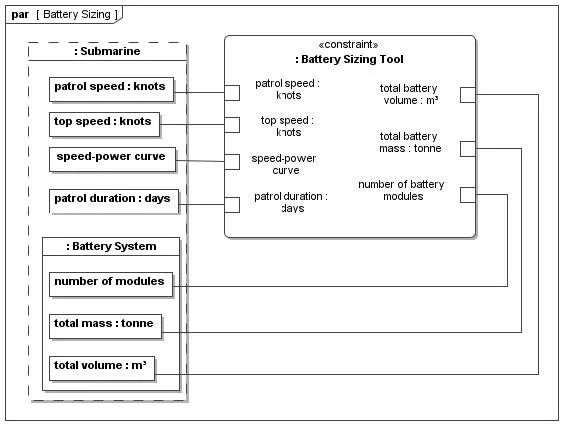
SysML案例-潜艇
DDD领域驱动设计批评文集>> 《软件方法》强化自测题集>> 《软件方法》各章合集>>...

车辆重识别(2020NIPS去噪扩散概率模型)论文阅读2024/9/27
[2] Denoising Diffusion Probabilistic Models 作者:Jonathan Ho Ajay Jain Pieter Abbeel 单位:加州大学伯克利分校 摘要: 我们提出了高质量的图像合成结果使用扩散概率模型,一类潜变量模型从非平衡热力学的考虑启发。我们的最…...

基于深度学习的任务序列中的快速适应
基于深度学习的任务序列中的快速适应是指模型在接连处理不同任务时,能够迅速调整和优化自身以适应新任务的能力。这种能力在动态环境和多任务学习中尤为重要,旨在减少训练时间和资源需求。以下是这一主题的关键要素: 1. 快速适应的背景 动态…...

虚拟机三种网络模式详解
在电脑里开一台虚拟机,是再常见不过的操作了。无论是用虚拟机玩只有旧版本系统能运行的游戏,还是用来学习Linux、跑跑应用程序都是很好的。而这其中,虚拟机网络是绝对绕不过去的。本篇文章通俗易懂的介绍了常见的虚拟网络提供的三种网络链接模…...

[leetcode]674_最长连续递增序列
给定一个未经排序的整数数组,找到最长且 连续递增的子序列,并返回该序列的长度。 连续递增的子序列 可以由两个下标 l 和 r(l < r)确定,如果对于每个 l < i < r,都有 nums[i] < nums[i 1] &am…...
【无人机设计与技术】四旋翼无人机,UAV仿真,轨迹跟踪PID控制
摘要 本文探讨了四旋翼无人机(UAV)在轨迹跟踪中的PID控制仿真方法。通过设计三轴方向的PID控制器,调节无人机的姿态与位置,使其能够准确跟踪预设轨迹。本文使用MATLAB/Simulink进行了建模与仿真,验证了PID控制算法在无…...

为什么你的DeepSeek Terraform配置总在CI/CD中崩溃?5个被官方文档隐藏的state锁机制真相
更多请点击: https://intelliparadigm.com 第一章:为什么你的DeepSeek Terraform配置总在CI/CD中崩溃?5个被官方文档隐藏的state锁机制真相 DeepSeek 与 Terraform 的深度集成虽提升了 AI 基础设施编排能力,但其 state 锁行为在 …...

Super IO插件:Blender文件操作效率革命,从繁琐拖拽到智能粘贴
Super IO插件:Blender文件操作效率革命,从繁琐拖拽到智能粘贴 【免费下载链接】super_io blender addon for copy paste import / export 项目地址: https://gitcode.com/gh_mirrors/su/super_io Super IO是一款革命性的Blender插件,通…...

本地AI任务编排工具AgentForge:从看板管理到多代理协作
1. 项目概述:一个能调度AI编码代理的本地看板工具如果你和我一样,日常开发中经常需要让Claude Code这类AI编码助手去执行一些重复性的代码审查、重构或者生成任务,并且希望这些任务能像CI/CD流水线一样被编排、调度和监控,那么你一…...

企业内如何通过 Taotoken 实现 API 访问权限的精细化控制与审计
🚀 告别海外账号与网络限制!稳定直连全球优质大模型,限时半价接入中。 👉 点击领取海量免费额度 企业内如何通过 Taotoken 实现 API 访问权限的精细化控制与审计 当企业将大模型能力引入内部工作流时,如何安全、可控地…...

【AI面试临阵磨枪-54】如何监控 AI 系统:成功率、延迟、Token 消耗、幻觉率、调用量
一、 面试题目面试官提问: “在大规模 Agent 系统中,你是如何建立监控体系的?请针对 成功率、延迟、Token 消耗、幻觉率、调用量 这五个核心指标,详细谈谈你的采集、分析与预警方案。”二、 知识储备1. 核心背景:AI 监…...

风机技术演进与主动冷却系统优化实践
1. 风机技术演进与主动空气冷却系统优化作为一名在热管理领域工作多年的工程师,我见证了风机技术从简单的散热部件发展为精密的热管理系统的全过程。现代电子设备功率密度不断提升,从智能手机到数据中心服务器,散热设计已成为产品成败的关键因…...

Open UI5 源代码解析之1378:DestinationField.js
源代码仓库: https://github.com/SAP/openui5 源代码位置:src\sap.ui.integration\src\sap\ui\integration\editor\fields\DestinationField.js DestinationField.js 文件分析 文件定位与整体判断 DestinationField.js 是 sap.ui.integration 编辑器体系中的一个专用字段…...

别再只用欧氏距离了!用Python手写曼哈顿距离,搞定KNN和聚类中的特征选择难题
曼哈顿距离实战:用Python优化KNN与聚类算法特征选择 在机器学习项目中,我们常常默认使用欧氏距离作为度量标准,却忽略了其他距离函数的独特价值。曼哈顿距离(Manhattan Distance)作为L1范数的典型代表,在处…...

多渠道订单数据处理自动化,落地步骤与ERP打通方案 | 2026企业级智能体实战手册
在2026年的数字化转型深水区,企业面临的不再是“是否要自动化”的问题, 而是如何在高并发、多维度的全渠道业务压力下, 实现订单流、资金流与信息流的绝对同步。 传统的OMS(订单管理系统)与ERP(企业资源计划…...
pc手机通用)
明末:渊虚之羽加修改器2026.5.12最新破解版免费下载 转存后自动更新 (看到请立即转存 资源随时失效)pc手机通用
游戏本体下载链接 修改器链接 由成都灵泽科技(Leenzee Games)开发,505 Games发行的动作角色扮演游戏《明末:渊虚之羽》(WUCHANG: Fallen Feathers)在近年来备受动作游戏玩家的关注。作为一款扎根于中国历…...