【C++】二叉搜索树+变身 = AVL树


目录
- 前言
- 一、AVL树
- 二、AVL树的实现
- 2.1 平衡因子
- 2.2 旋转处理
- 2.2.1 左单旋:插入新节点后单纯的右边高
- 2.2.2 右单旋:插入新节点后单纯的左边高
- 2.2.3 左右旋:插入新节点后不是单纯的左边高
- 2.2.4 右左旋:插入新节点后不是单纯的右边高
- 2.3 验证AVL树的平衡
- 三、完整代码
前言
本文仅适合了解二叉搜索树,但不了解AVL树底层原理的同学阅读哦。
本篇文章不会带你从头到尾实现AVL树,但会带你深入理解AVL树是怎么实现平衡的,怎么通过旋转变换实现保持平衡,以及实现平衡过程中的细节应该怎么处理等。
一、AVL树
前面的文章中我们分析过二叉搜索树的性能,得到的结果是理想情况下二叉搜索树的时间复杂度为O(LogN),但在极端情况下(即树蜕化为单边树时),这些操作的时间复杂度会退化为O(n),即使情况不那么极端,效率也不是特别高。
为了防止二叉搜索树出现一边偏高的情况,就需要想办法让二叉搜索树尽量保持平衡,所以两位苏联数学家(或称为俄罗斯数学家)G.M. Adelson-Velsky和E.M. Landis就发明了AVL树,其任何节点的两个子树的高度最大差别为1。
AVL树是具有一下性质的二叉搜索树:
- 其左右子树都是AVL树
- 左右子树高度差不超过1
二、AVL树的实现
本篇文章将沿用之前文章中Key-Value模型的代码,不再从底层开始实现,主要介绍在插入新节点后如何保持二叉搜索树的平衡问题。
2.1 平衡因子
如何保证AVL树的左右子树高度差不超过1?在AVL树的每个节点中存一个平衡因子,本文我们定义平衡因子 = 此节点右子树的高度 - 左子树的高度。
- 插入在左子树,平衡因子 - -
- 插入在右子树,平衡因子++
更新祖先节点的平衡因子时,我们首先需要找到祖先节点,因此每个节点中还需要增加一个指向父节点的指针。
按照我们的需求,其AVL树的节点可以定义为:
template<class K, class V>
struct AVLTreeNode
{pair<K, V> _kv;AVLTreeNode<K, V>* _left;AVLTreeNode<K, V>* _right;AVLTreeNode<K, V>* _parent;int _bf;//平衡因子//构造AVLTreeNode(const pair<K, V>& kv):_kv(kv),_left(nullptr),_right(nullptr),_parent(nullptr),_bf(0){}
};
是否继续往上更新祖先节点的平衡因子,要看parent所在子树的高度是否发生变化。
插入新节点后其父节点的平衡因子有以下几种情况:
- parent的平衡因子 == 0
parent的平衡因子更新前是 -1 / 1,新节点插入在矮的那边,高度不变,不再往上更新 - parent的平衡因子 == 1 / -1
parent的平衡因子更新前是0,parent所在子树高度都变化了,需要往上更新 - parent的平衡因子 == 2 / -2
parent的平衡因子更新前是 -1 / 1,插入新节点后树不再平衡,需要旋转处理
pcur = new Node(kv);
if (parent->_kv.first > kv.first)//判断新节点应该插入左还是右
{parent->_left = pcur;
}
else
{parent->_right = pcur;
}
pcur->_parent = parent;//与父节点链接关系while (parent)//有可能更新到根节点去
{parent->_bf = parent->_left == pcur ? parent->_bf - 1 : parent->_bf + 1;if (parent->_bf == 0)//插入前后高度不变{break;}else if (parent->_bf == 1 || parent->_bf == -1){//高度变了,继续往上更新pcur = parent;parent = parent->_parent;}else if (parent->_bf == 2 || parent->_bf == -2){//插入节点后二叉树不平衡了,需要旋转处理}else{assert(false);//检测AVL树是否异常}
}
2.2 旋转处理
当二叉搜索树出现不平衡的情况时,需要旋转处理,对应插入后二叉搜索树的各种情况,主要有四种旋转的方式来保持平衡。
其中:
- h代表子树的高度,可以是0、1、2…
- 我们用能代表所有情况的四种类型的抽象图来研究旋转方式,单纯研究某几种情况没有意义
原则:
- 保持搜索树的性质
- 降低高度,控制平衡
2.2.1 左单旋:插入新节点后单纯的右边高
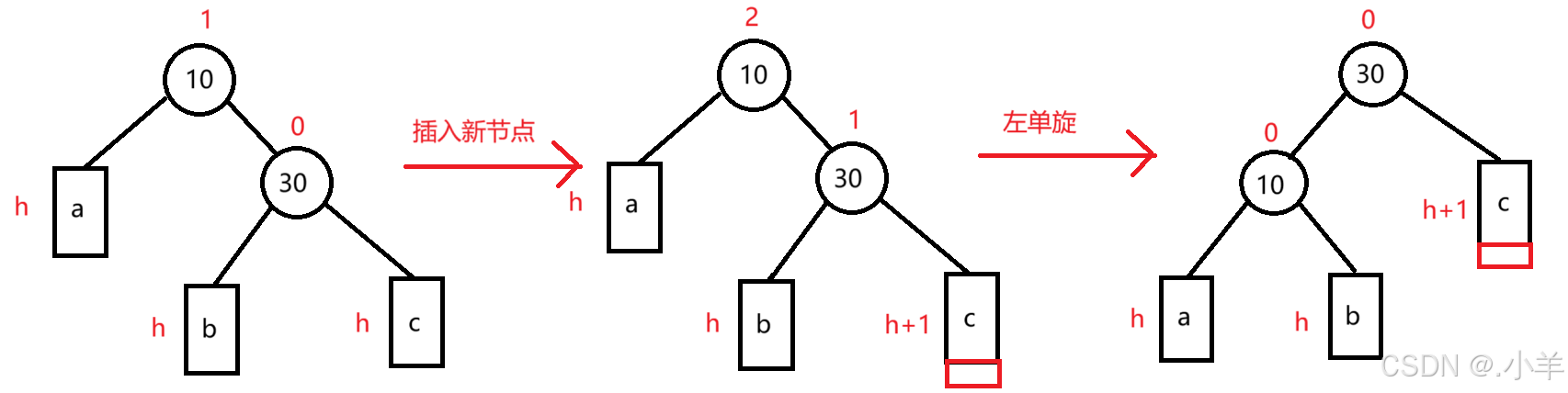
旋转处理过程中,我们主要关注三个节点(以上图为例):10(标记为
parent)、30(标记为subR)、b(标记为subLR)。
在旋转过程中,有以下几种情况需要考虑:
subR的左孩子可能存在,也可能不存在parent可能是根节点,也可能是子树。如果是根节点,旋转完成后,要更新根节点;如果是子树,可能是某个节点的左子树,也可能是右子树
//左单旋
void RotateL(Node* parent)
{Node* subR = parent->_right;Node* subRL = subR->_left;//subRL是有可能为空的parent->_right = subRL;subR->_left = parent;Node* parentparent = parent->_parent;parent->_parent = subR;if (parentparent == nullptr)//subR有可能变成根{_root = subR;}else{if (parentparent->_left == parent){parentparent->_left = subR;}else{parentparent->_right = subR;}}subR->_parent = parentparent;if (subRL){subRL->_parent = parent;}parent->_bf = subR->_bf = 0;//更新平衡因子
}
旋转处理过程中主要是处理各节点的父节点指针的指向和平衡因子的更新。
2.2.2 右单旋:插入新节点后单纯的左边高
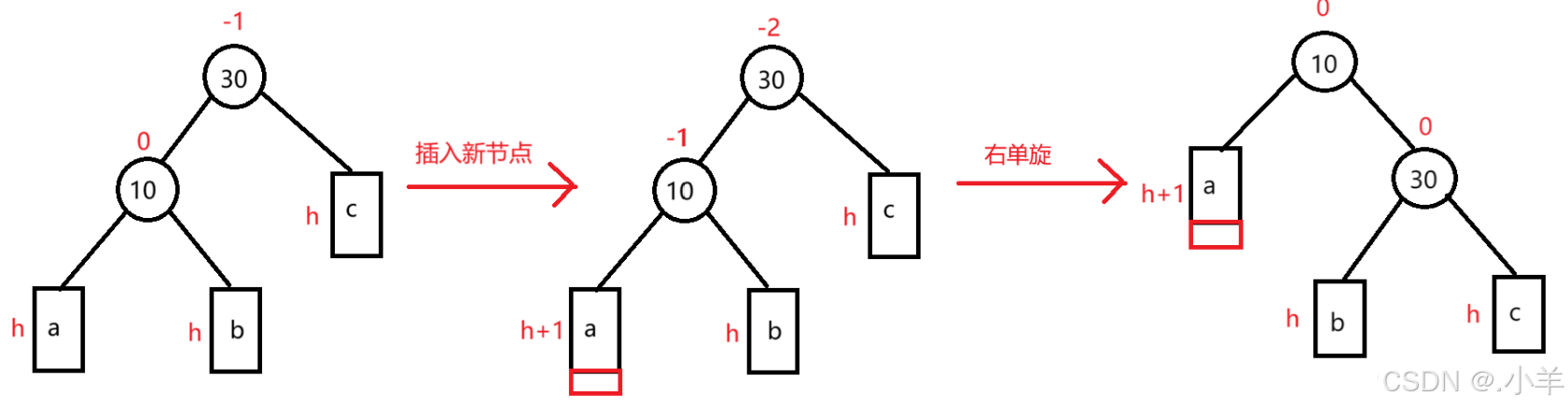
其处理方式和左单旋相似,可参考左单旋。
//右单旋
void RotateR(Node* parent)
{Node* subL = parent->_left;Node* subLR = subL->_right;parent->_left = subLR;subL->_right = parent;Node* parentparent = parent->_parent;parent->_parent = subL;if (parentparent == nullptr){_root = subL;}else{if (parentparent->_left == parent){parentparent->_left = subL;}else{parentparent->_right = subL;}}subL->_parent = parentparent;if (subLR){subLR->_parent = parent;}subL->_bf = parent->_bf = 0;
}
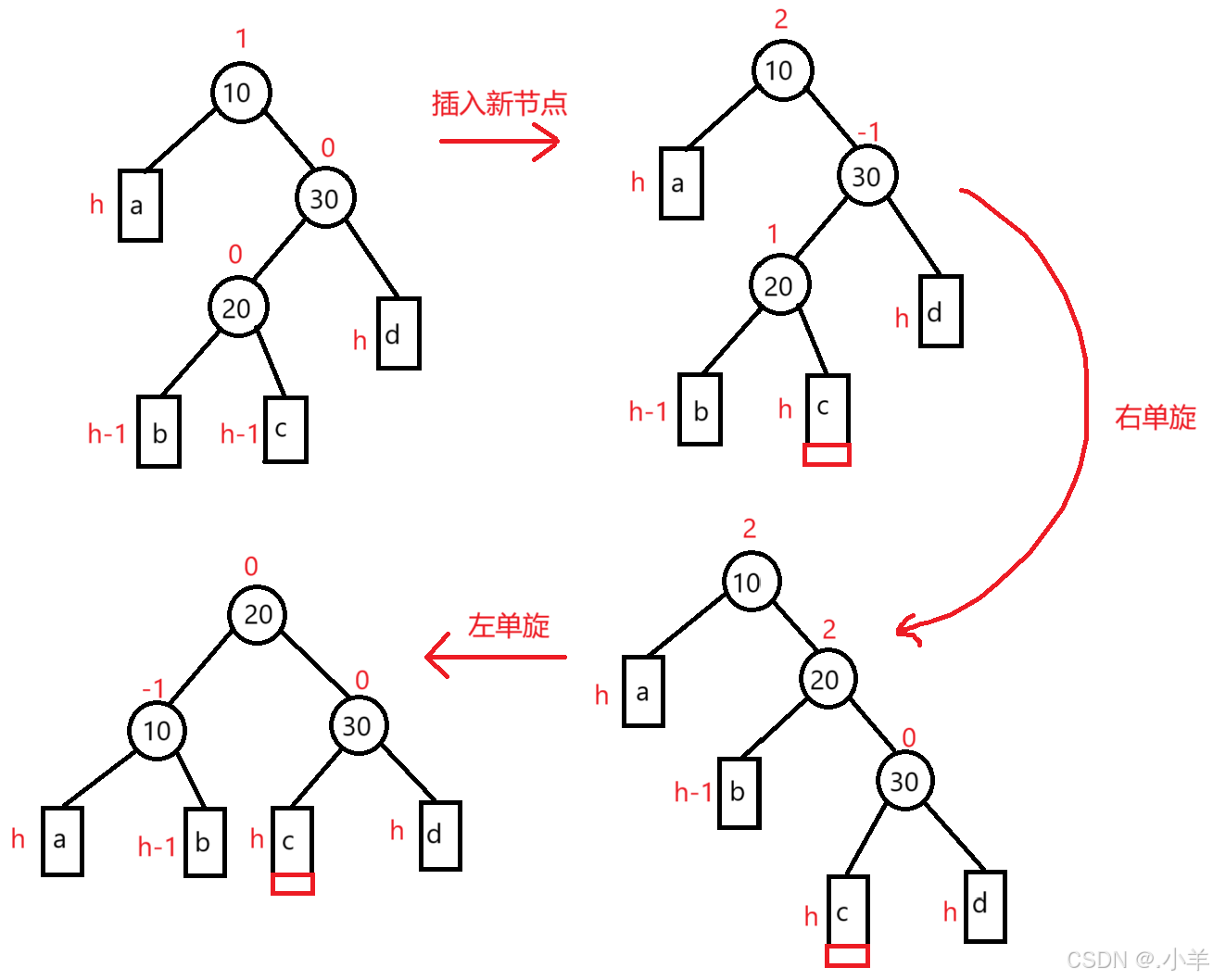
2.2.3 左右旋:插入新节点后不是单纯的左边高
这种情况只用左旋或右旋只会原地打转,不能降低平衡。
我们需要先对subL进行左单旋,再对parent进行右单旋,最后更新平衡因子。
- 双旋后平衡因子的更新要根据插入新节点后
subLR的平衡因子来分情况讨论- 双旋最终结果是把
subLR推到最上面,让其平衡因子为0
//左右旋
void RotateLR(Node* parent)
{Node* subL = parent->_left;Node* subLR = subL->_right;int bf = subLR->_bf;RotateL(parent->_left);RotateR(parent);if (bf == 0){parent->_bf = 0;subL->_bf = 0;subLR->_bf = 0;}else if (bf == -1){parent->_bf = 1;subL->_bf = 0;subLR->_bf = 0;}else if (bf == 1){parent->_bf = 0;subL->_bf = -1;subLR->_bf = 0;}else{assert(false);}
}
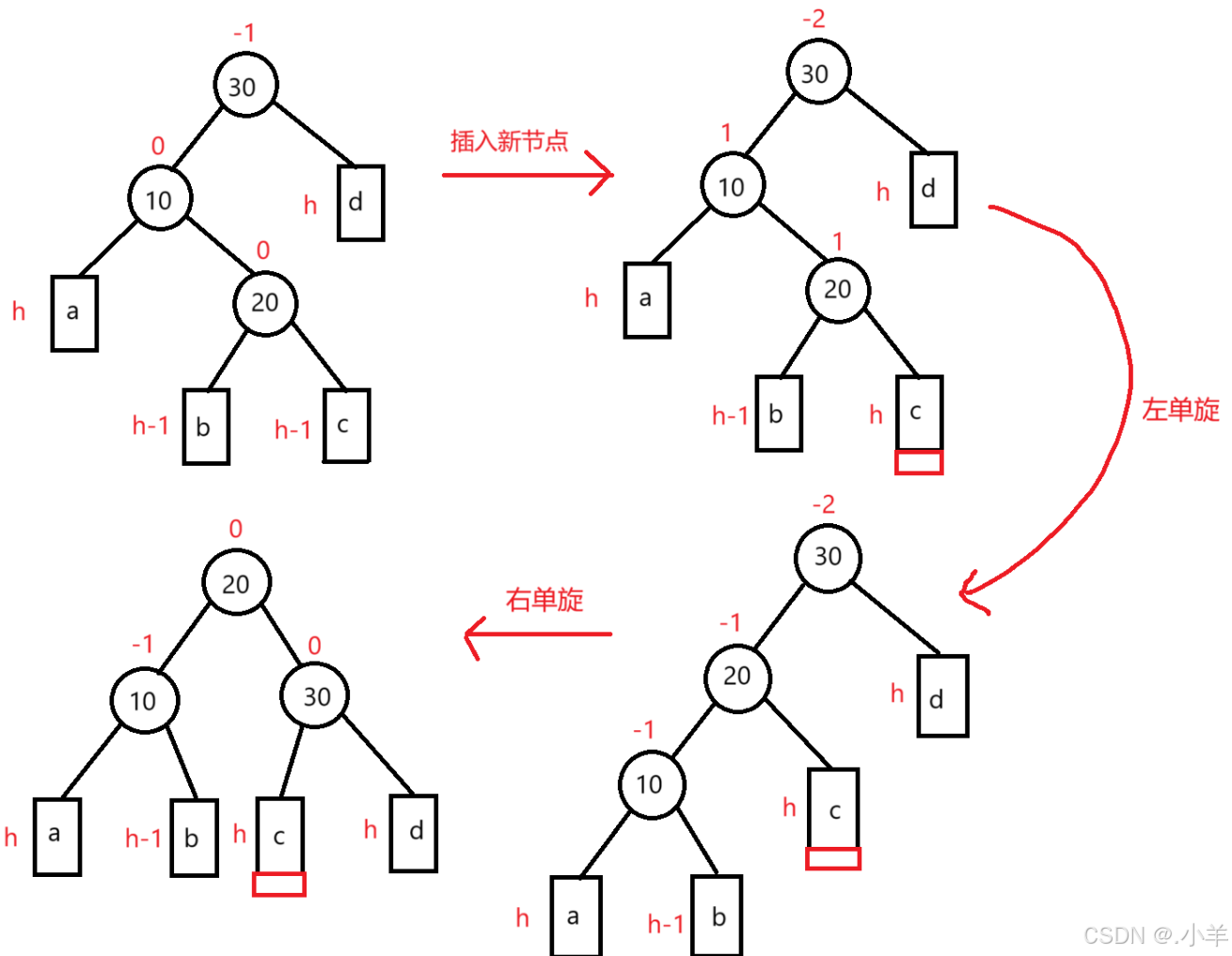
2.2.4 右左旋:插入新节点后不是单纯的右边高
可参考左右旋。
//右左旋
void RotateRL(Node* parent)
{Node* subR = parent->_right;Node* subRL = subR->_left;int bf = subRL->_bf;RotateR(parent->_right);RotateL(parent);if (bf == 0){parent->_bf = 0;subR->_bf = 0;subRL->_bf = 0;}else if (bf == -1){parent->_bf = 0;subR->_bf = 1;subRL->_bf = 0;}else if (bf == 1){parent->_bf = -1;subR->_bf = 0;subRL->_bf = 0;}else{assert(false);}
}
旋转完成后,原parent为根的子树个高度降低,已经平衡,不需要再向上更新。
2.3 验证AVL树的平衡
我们可以分别计算出其左子树和右子树的高度,将其相减的值与节点中记录的平衡因子的值比较,看是否符合我们的预期。
int _Height(Node* root)
{if (root == nullptr){return 0;}int leftheight = _Height(root->_left);int rightheight = _Height(root->_right);return leftheight > rightheight ? leftheight + 1 : rightheight + 1;
}bool _isBalanceTree(Node* root)
{if (root == nullptr){return true;}int leftheight = _Height(root->_left);int rightheight = _Height(root->_right);int bf = rightheight - leftheight;if (abs(bf) > 1){cout << root->_kv.first << "高度差异常" << endl;return false;}if (root->_bf != bf){cout << root->_kv.first << "平衡因子异常" << endl;return false;}return _isBalanceTree(root->_left) && _isBalanceTree(root->_right);
}
三、完整代码
template<class K, class V>
struct AVLTreeNode
{pair<K, V> _kv;AVLTreeNode<K, V>* _left;AVLTreeNode<K, V>* _right;AVLTreeNode<K, V>* _parent;int _bf;//平衡因子AVLTreeNode(const pair<K, V>& kv):_kv(kv),_left(nullptr),_right(nullptr),_parent(nullptr),_bf(0){}
};template<class K, class V>
class AVLTree
{typedef AVLTreeNode<K, V> Node;
public:AVLTree() = default;AVLTree(const AVLTree<K, V>& t){_root = copy(t._root);}AVLTree<K, V>& operator=(AVLTree<K, V> t){swap(_root, t._root);return *this;}~AVLTree(){Destroy(_root);_root = nullptr;}bool Find(const K& key){Node* pcur = _root;while (pcur){if (key < pcur->_kv.first){pcur = pcur->_left;}else if (key > pcur->_kv.first){pcur = pcur->_right;}else{return true;}}return false;}bool Insert(const pair<K, V>& kv){//没有节点时需要单独处理if (_root == nullptr){_root = new Node(kv);return true;}Node* pcur = _root;Node* parent = nullptr;while (pcur){if (kv.first < pcur->_kv.first){parent = pcur;pcur = pcur->_left;}else if (kv.first > pcur->_kv.first){parent = pcur;pcur = pcur->_right;}else{return false;}}pcur = new Node(kv);if (parent->_kv.first > kv.first)//判断新节点应该插入左还是右{parent->_left = pcur;}else{parent->_right = pcur;}pcur->_parent = parent;//与父节点链接关系//更新平衡因子while (parent)//有可能更新到根节点去{parent->_bf = parent->_left == pcur ? parent->_bf - 1 : parent->_bf + 1;if (parent->_bf == 0)//插入前后高度不变{break;}else if (parent->_bf == 1 || parent->_bf == -1){//高度变了,继续往上更新pcur = parent;parent = parent->_parent;}else if (parent->_bf == 2 || parent->_bf == -2){//插入节点后二叉树不平衡了,需要旋转处理if (parent->_bf == 2 && pcur->_bf == 1){RotateL(parent);}else if (parent->_bf == -2 && pcur->_bf == -1){RotateR(parent);}else if (parent->_bf == 2 && pcur->_bf == -1){RotateRL(parent);}else if (parent->_bf == -2 && pcur->_bf == 1){RotateLR(parent);}break;//不管是哪种情况,旋转完后子树的高度没有变化,所以不再调整}else{assert(false);//检测AVL树是否异常}}return true;}void InOrder(){_InOrder(_root);cout << endl;}bool IsBalanceTree(){return _isBalanceTree(_root);}private://左单旋void RotateL(Node* parent){Node* subR = parent->_right;Node* subRL = subR->_left;//subRL是有可能为空的parent->_right = subRL;subR->_left = parent;Node* parentparent = parent->_parent;parent->_parent = subR;if (parentparent == nullptr)//subR有可能变成根{_root = subR;}else{if (parentparent->_left == parent){parentparent->_left = subR;}else{parentparent->_right = subR;}}subR->_parent = parentparent;if (subRL){subRL->_parent = parent;}parent->_bf = subR->_bf = 0;//更新平衡因子}//右单旋void RotateR(Node* parent){Node* subL = parent->_left;Node* subLR = subL->_right;parent->_left = subLR;subL->_right = parent;Node* parentparent = parent->_parent;parent->_parent = subL;if (parentparent == nullptr){_root = subL;}else{if (parentparent->_left == parent){parentparent->_left = subL;}else{parentparent->_right = subL;}}subL->_parent = parentparent;if (subLR){subLR->_parent = parent;}subL->_bf = parent->_bf = 0;}//左右旋void RotateLR(Node* parent){Node* subL = parent->_left;Node* subLR = subL->_right;int bf = subLR->_bf;RotateL(parent->_left);RotateR(parent);if (bf == 0){parent->_bf = 0;subL->_bf = 0;subLR->_bf = 0;}else if (bf == -1){parent->_bf = 1;subL->_bf = 0;subLR->_bf = 0;}else if (bf == 1){parent->_bf = 0;subL->_bf = -1;subLR->_bf = 0;}else{assert(false);}}//右左旋void RotateRL(Node* parent){Node* subR = parent->_right;Node* subRL = subR->_left;int bf = subRL->_bf;RotateR(parent->_right);RotateL(parent);if (bf == 0){parent->_bf = 0;subR->_bf = 0;subRL->_bf = 0;}else if (bf == -1){parent->_bf = 0;subR->_bf = 1;subRL->_bf = 0;}else if (bf == 1){parent->_bf = -1;subR->_bf = 0;subRL->_bf = 0;}else{assert(false);}}Node* copy(Node* root){if (root == nullptr){return nullptr;}Node* copynode = new Node(root->_kv);copynode->_left = copy(root->_left);copynode->_right = copy(root->_right);return copynode;}void Destroy(Node* root){if (root == nullptr)return;Destroy(root->_left);Destroy(root->_right);delete root;}void _InOrder(Node* root){if (root == nullptr)//递归一定要有结束条件{return;}_InOrder(root->_left);cout << root->_kv.first << ":" << root->_kv.second << endl;_InOrder(root->_right);}int _Height(Node* root){if (root == nullptr){return 0;}int leftheight = _Height(root->_left);int rightheight = _Height(root->_right);return leftheight > rightheight ? leftheight + 1 : rightheight + 1;}bool _isBalanceTree(Node* root){if (root == nullptr){return true;}int leftheight = _Height(root->_left);int rightheight = _Height(root->_right);int bf = rightheight - leftheight;if (abs(bf) > 1){cout << root->_kv.first << "高度差异常" << endl;return false;}if (root->_bf != bf){cout << root->_kv.first << "平衡因子异常" << endl;return false;}return _isBalanceTree(root->_left) && _isBalanceTree(root->_right);}private:Node* _root = nullptr;
};
本篇文章的分享就到这里了,如果您觉得在本文有所收获,还请留下您的三连支持哦~

相关文章:
【C++】二叉搜索树+变身 = AVL树
🚀个人主页:小羊 🚀所属专栏:C 很荣幸您能阅读我的文章,诚请评论指点,欢迎欢迎 ~ 目录 前言一、AVL树二、AVL树的实现2.1 平衡因子2.2 旋转处理2.2.1 左单旋:插入新节点后单纯的右边高2.2.2 …...

Flutter String 按 ,。分割
在 Flutter 中,如果你想将一个字符串按特定的字符(例如中文逗号 , 和英文句号 .)进行分割,可以使用 Dart 语言的字符串处理功能。具体来说,你可以使用 split 方法,并传入一个正则表达式来匹配这…...

Redis: 集群高可用之MOVED转向和ASK转向解决方案
MOVED转向 1 ) 问题描述 在客户端操作Redis集群的时候 MOVED转向 或 MOVED错误是经常遇到的一类问题我们先连入集群:$ /usr/local/redis/bin/redis-cli -a 123456 -h 192.168.10.101 -p 6371之前在Redis中存储过一些数据,比如下面的情况,当输…...
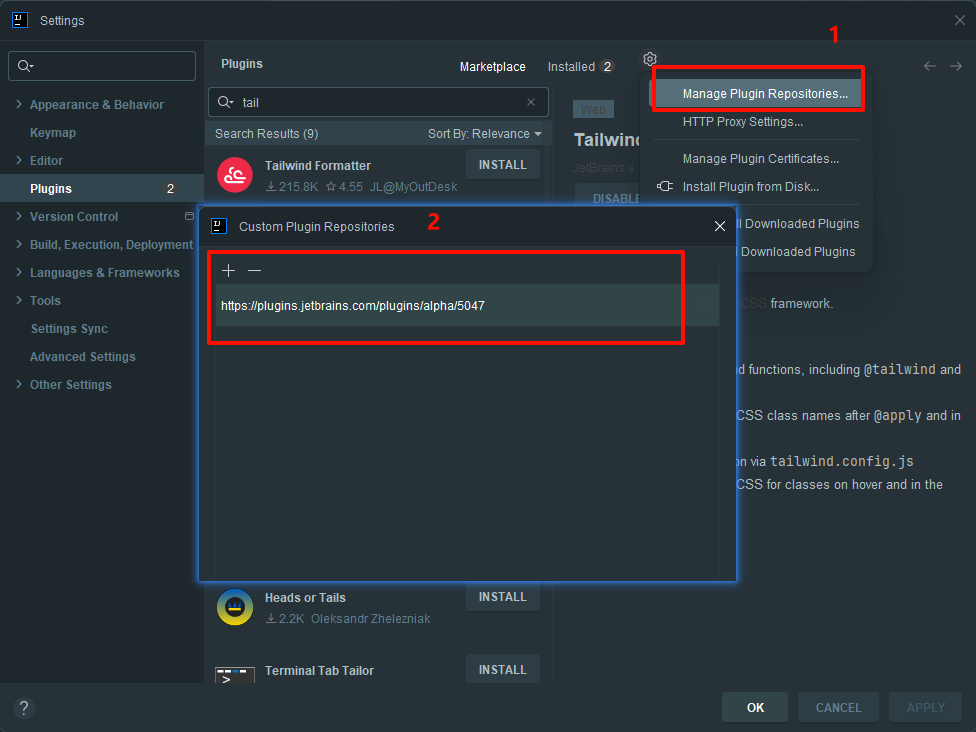
idea插件市场安装没反应
https://plugins.jetbrains.com/idea重启后还是不行那就...

数据结构之排序(5)
摘要:本文主要讲各种排序算法,注意它们的时间复杂度 概念 将各元素按关键字递增或递减排序顺序重新排列 评价指标 稳定性: 关键字相同的元素经过排序后相对顺序是否会改变 时间复杂度、空间复杂度 分类 内部排序——数据都在内存中 外部排序——…...

R包的安装、加载以及如何查看帮助文档
0x01 如何安装R包 一、通过R 内置函数安装(常用) 1.安装CRAN的R包 install.packages()是一个用于安装 R 包的重要函数。 语法:install.packages(pkgs, repos getOption("repos"),...) 其中: pkgs:要安…...

【YOLO学习】YOLOv3详解
文章目录 1. 网络结构1.1 结构介绍1.2 改进 2. 训练与测试过程3. 总结 1. 网络结构 1.1 结构介绍 1. 与 YOLOv2 不同的是,YOLOv3 在 Darknet-19 里加入了 ResNet 残差连接,改进之后的模型叫 Darknet-53。在 ImageNet上 实验发现 Darknet-53 相对于 ResN…...

JDK1.0主要特性
JDK 1.0,也被称为Java 1,是Java编程语言的第一个正式版本,由Sun Microsystems公司在1996年发布。JDK 1.0的发布标志着Java作为一种编程语言和平台的正式诞生,它带来了许多创新的概念和特性,对后来的软件开发产生了深远…...
)
CSS基础-盒子模型(三)
9、CSS盒子模型 9.1 CSS常用长度单位 1、px:像素; 2、em:相对元素font-size的倍数; 3、rem:相对根字体的大小,html标签即是根; 4、%:相对于父元素进行计算。 注意:CSS样…...

深度学习中的损失函数详解
深度学习中的损失函数详解 文章目录 深度学习中的损失函数详解损失函数的基础概念常见的损失函数类型及应用场景回归问题的损失函数分类问题的损失函数自定义损失函数 如何选择合适的损失函数?损失函数在深度学习中的应用 在深度学习的世界中,损失函数&a…...
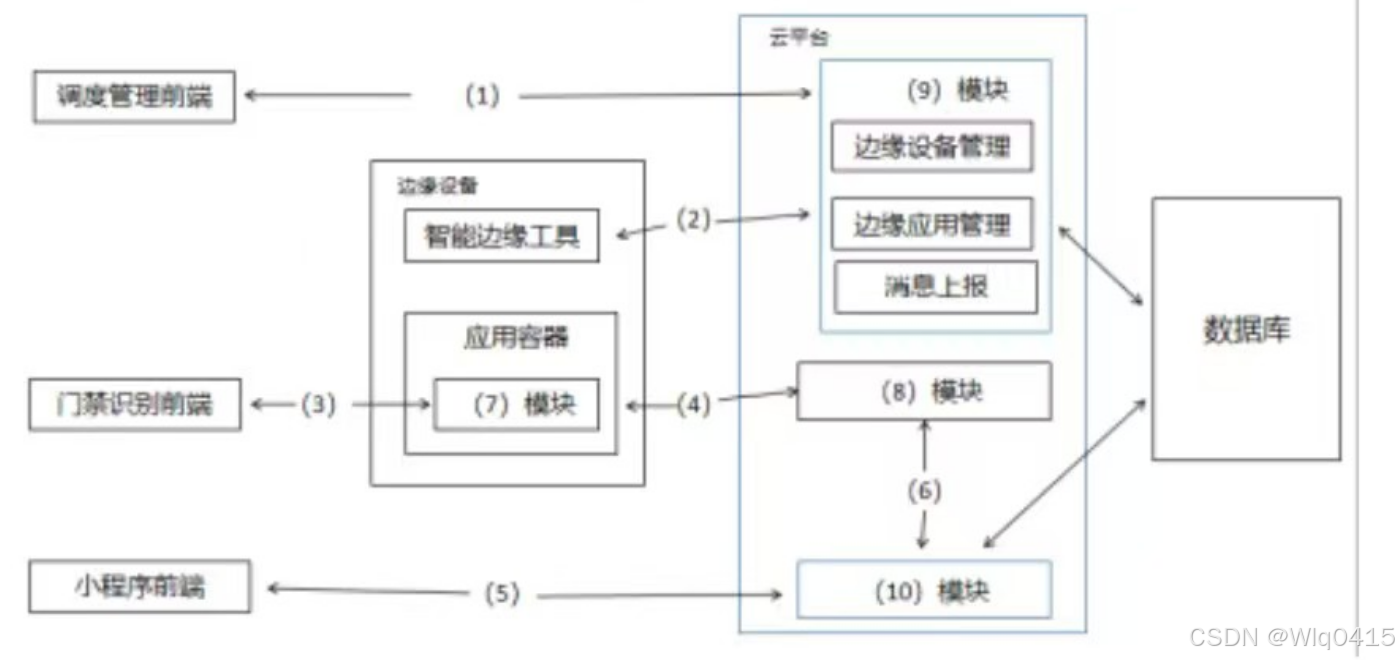
系统架构设计师-下午案例题(2022年下半年)
1.试题-(共25分):阅读以下关于软件架构设计与评估的叙述在答题纸上回答问题1和问题2。 【说明】某电子商务公司拟升级其会员与促销管理系统,向用户提供个性化服务,提高用户的粘性。在项目立项之初,公司领导层一致认为本次升级的主要目标是提…...
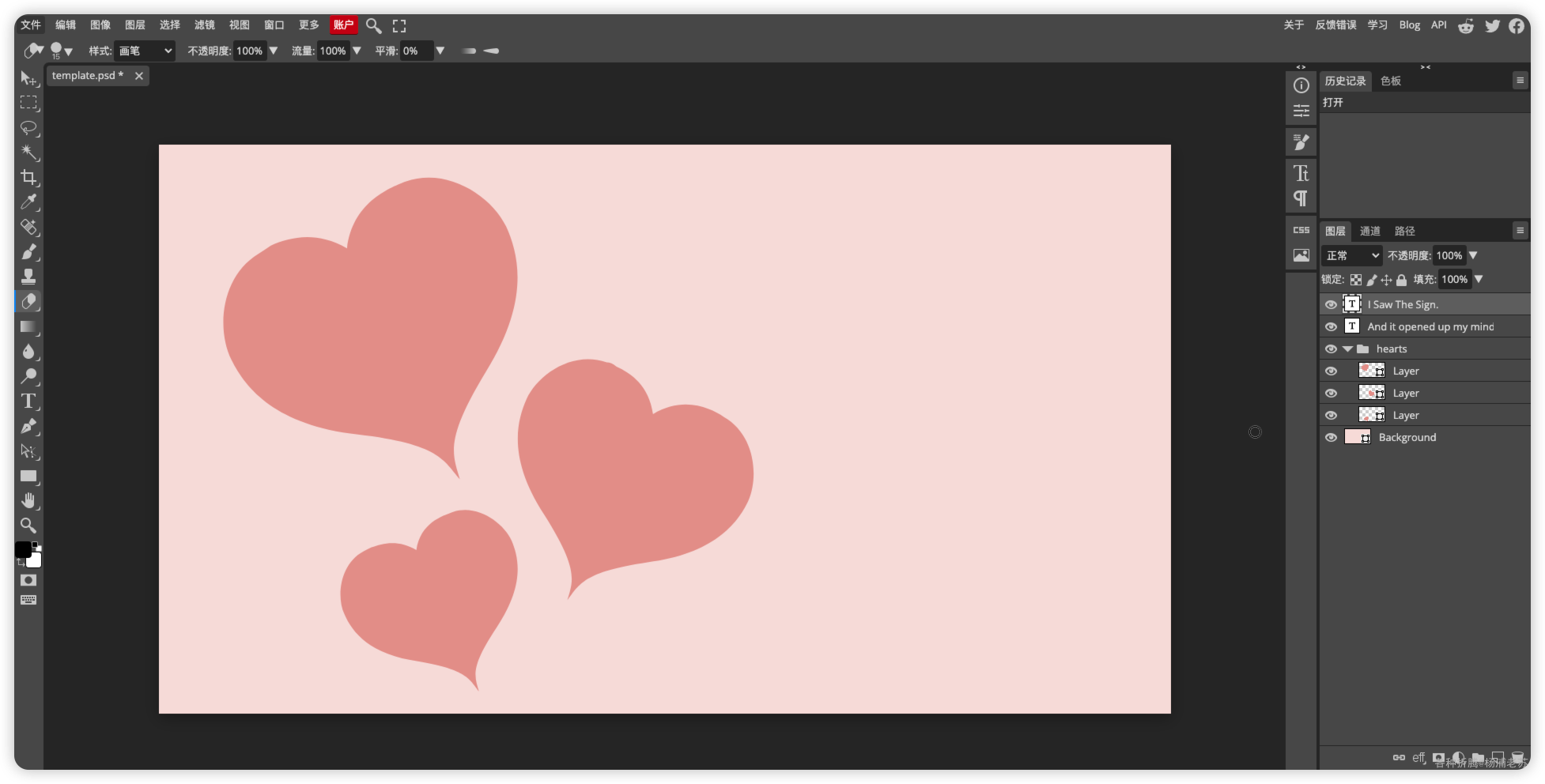
高级图片编辑器Photopea
什么是 Photopea ? Photopea 是一款免费的在线工具,用于编辑光栅和矢量图形,支持PSD、AI 和 Sketch文件。 功能上,Photopea 和 老苏之前介绍的 miniPaint 比较像 文章传送门:在线图片编辑器miniPaint 支持的格式 复杂…...

详解zookeeper四字命令
ZooKeeper 的四字命令(Four-Letter Words, 4LW)是一组简单的管理和监控命令,方便运维人员快速获取 ZooKeeper 集群和节点的运行状态。这些命令通常用于健康检查、性能监控、节点配置查看等操作。通过这些命令,可以轻松获取关于 Zo…...

docker 进入容器运行命令
要进入正在运行的Docker容器并在其中执行命令,你可以使用docker exec命令。以下是具体步骤和示例: 1. 查看正在运行的容器 首先,确认你的容器正在运行,可以使用以下命令查看所有运行中的容器: docker ps2. 进入容器…...

一行 Python 代码能实现什么丧心病狂的功能?圣诞树源代码
手头有 109 张头部 CT 的断层扫描图片,我打算用这些图片尝试头部的三维重建。基础工作之一,就是要把这些图片数据读出来,组织成一个三维的数据结构(实际上是四维的,因为每个像素有 RGBA 四个通道)。 这个…...

mit6824-01-MapReduce详解
文章目录 MapReduce简述编程模型执行流程执行流程排序保证Combiner函数Master数据结构 容错性Worker故障Master故障 性能提升定制分区函数局部性执行缓慢的worker(slow workers) 常见问题总结回顾参考链接 MapReduce简述 MapReduce是一个在多台机器上并行计算大规模数据的软件架…...

在Docker中运行微服务注册中心Eureka
1、Docker简介: 作为开发者,经常遇到一个头大的问题:“在我机器上能运行”。而将SpringCloud微服务运行在Docker容器中,避免了因环境差异带来的兼容性问题,能够有效的解决此类问题。 通过Docker,开发者可…...

白话进程>线程>协程
文章目录 概述进程线程协程区别与联系 举个栗子进程例子线程例子协程例子区别与联系的具体体现 代码示例进程例子线程例子协程(Goroutine)例子 概述 进程、线程和协程是计算机科学中的基本概念,它们在操作系统和并发编程中扮演着重要角色。以…...
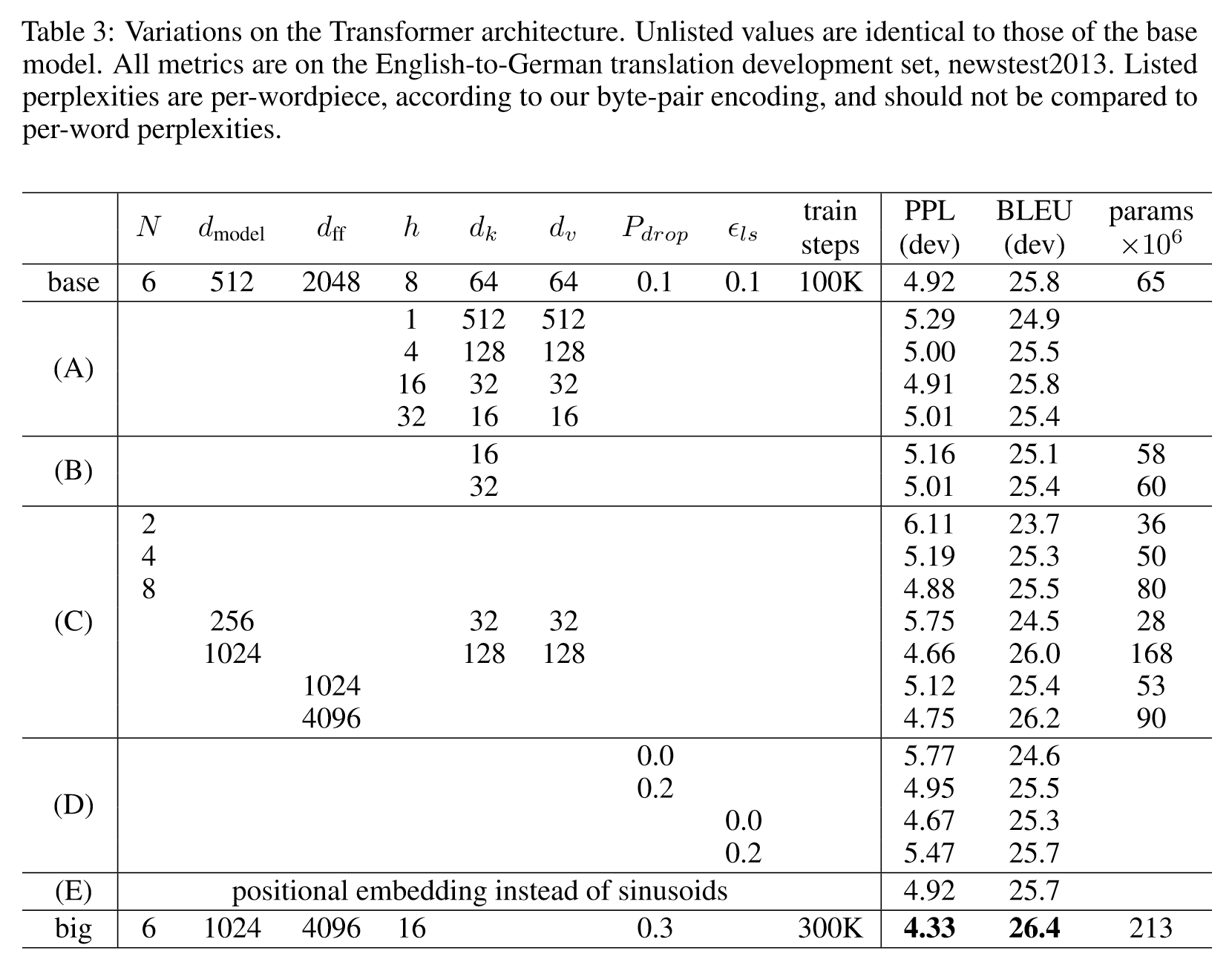
论文阅读:Attention is All you Need
Abstract 贡献: 提出了Transformer,完全基于注意力机制,摒弃了循环和卷积网络。 结果: 本模型在质量上优于现有模型,同时具有更高的并行性,并且显著减少了训练时间。 1. Introduction long short-term …...

【Linux 】文件描述符fd、重定向、缓冲区(超详解)
目录 编辑 系统接口进行文件访问 open 接口介绍 文件描述符fd 重定向 缓冲区 1、缓冲区是什么? 2、为什么要有缓冲区? 3、怎么办? 我们先来复习一下,c语言对文件的操作: C默认会打开三个输入输出流…...

如何通过Xiaomusic开源项目解锁小爱音箱的完整音乐播放功能
如何通过Xiaomusic开源项目解锁小爱音箱的完整音乐播放功能 【免费下载链接】xiaomusic 使用小爱音箱播放音乐,音乐使用 yt-dlp 下载。 项目地址: https://gitcode.com/GitHub_Trending/xia/xiaomusic Xiaomusic是一款开源智能音乐播放器,专为小米…...

从鱼眼到广角:相机畸变公式的实战拆解与参数调优
1. 相机畸变:从鱼眼到广角的视觉魔法 第一次用鱼眼镜头拍照片时,我被画面边缘夸张的弯曲效果震撼到了——直线变成了弧线,方形门框变成了圆润的拱门。这种"变形魔法"其实就是相机畸变最直观的体现。作为算法工程师,我花…...

Git 核心操作:rebase 与 merge 的区别,以及分支管理最佳实践
Git 核心操作:rebase 与 merge 的区别,以及分支管理最佳实践 在日常开发中,Git 是不可或缺的版本控制工具。而 git merge 和 git rebase 是整合分支最常用的两个命令,很多人对它们的概念模糊,不知道何时用哪个。同时&a…...

如何快速掌握PyInstaller Extractor:5步提取可执行文件的完整指南
如何快速掌握PyInstaller Extractor:5步提取可执行文件的完整指南 【免费下载链接】pyinstxtractor PyInstaller Extractor 项目地址: https://gitcode.com/gh_mirrors/py/pyinstxtractor PyInstaller Extractor是一款专为提取PyInstaller生成的可执行文件内…...

Cursor AI插件开发:从代码补全到智能动作执行的范式演进
1. 项目概述:当AI代码助手遇上插件生态最近在GitHub上看到一个挺有意思的项目,叫RightbrainAI/cursor-plugin。光看名字,可能很多用惯了Cursor的朋友会眼前一亮,以为这是Cursor编辑器官方或者某个社区大神出的插件。但点进去仔细一…...

暑期旅游网络诈骗演化与 AI 赋能防御体系研究
摘要 2026 年暑期旅游旺季到来,在线预订、短信通知、证件办理等全流程成为网络诈骗高发场景。The420.in 于 2026 年 5 月 16 日发布的安全预警显示,虚假通行费钓鱼短信、AI 伪造房源预订、虚假政务证件网站、深度伪造语音与视频四类诈骗呈产业化、规模化…...

为什么83%的用户误读NotebookLM引用溯源?一文讲透证据链完整性校验四步法
更多请点击: https://intelliparadigm.com 第一章:为什么83%的用户误读NotebookLM引用溯源?一文讲透证据链完整性校验四步法 NotebookLM 的“引用溯源”功能并非传统意义上的文献标注,而是一套基于语义锚点与片段置信度的轻量级证…...

Snipe-IT终极指南:如何构建企业级IT资产管理系统
Snipe-IT终极指南:如何构建企业级IT资产管理系统 【免费下载链接】snipe-it A free open source IT asset/license management system 项目地址: https://gitcode.com/GitHub_Trending/sn/snipe-it 在当今数字化时代,企业IT资产管理已成为组织运营…...

BepInEx.ConfigurationManager:3步打造专业级Unity插件配置界面
BepInEx.ConfigurationManager:3步打造专业级Unity插件配置界面 【免费下载链接】BepInEx.ConfigurationManager Plugin configuration manager for BepInEx 项目地址: https://gitcode.com/gh_mirrors/be/BepInEx.ConfigurationManager 你是否曾为Unity游戏…...

【AI Agent软件直控革命】:20年架构师亲授5大落地陷阱与3步安全接入法
更多请点击: https://intelliparadigm.com 第一章:AI Agent软件直控革命:从概念到产业拐点 AI Agent 已不再停留于对话式助手或任务调度器的初级形态,正加速演进为具备环境感知、自主决策与系统级直控能力的“数字执行体”。其核…...