Android GPIO方式解码红外数据
1 红外遥控协议
1.1 基本概念
1)NEC协议,采用PWM方式调制。38KHz载波,一般是由引导码+地址码+地址反码+数据+数据反码构成。
遥控接收头端收到的信号为:逻辑1是560us低+1680us高,逻辑0是560us低+560us高。
地址:u32 >> 24
地址反码:u32 >> 16
数据:u32 >> 8
数据反码:u32 & 0xff
2)Philips RC-5协议,采用PPM方式调制
1.2 STM32 TIM解码红外信号
输入捕获模式下:当捕获单元捕获到外来有效信号边沿事件(通过TIM1 CH1 Capture Compare Enable Register = 0xB设置上升沿和下降沿捕获,STM32库使用宏TIM_ICPolarity_BothEdge = 0x000A配置双边沿触发捕获),将此刻计数器的值锁存到CCR(Capture Compare Register,16bit)影子寄存器并自动将CCR影子寄存器的值拷贝进CCR预装寄存器,以供用户读取。DMA传输方式就是将CCR预装寄存器中的计数值传输到内存中。CCR寄存器中的计数值与上一次的计数值相减 x 计数频率的倒数 = 高电平或者低电平信号宽度。
输入捕获采样的频率就是定时器经过预分配器(PSC)之后的频率,譬如STM32F1 TIM1 CH1的计数器频率等于4 x 1.786KHz (560us) = 72MHz/(Prescaler + 1),那么计数器计数每增加4个就表示一个bit。解码时,连续2次计数间隔相等时表示0,连续2次计数间隔不等时表示1。
另外一种方式是将TIM的计数频率配置成1MHz,则每1us计数值加1。
2 Android GPIO IR配置
2.1 Linux设备树配置
Add gpio-ir-recv platform device dts and pinctrl as shown below:
ir: ir-receiver {
compatible = "gpio-ir-receiver";
gpios = <&msmgpio 52 1>;
linux,rc-map-name = "rc-YOUR_DEVICE-nec";
pinctrl-names = "default";
pinctrl-0 = <&oem_gpio_ir_pu>;
oem,disable_ipc;
};
oem_gpio_ir {
qcom,pins = <&gp 52>;
qcom,num-grp-pins = <1>;
qcom,pin-func = <1>;
label = "oem_gpio_ir";
oem_gpio_ir_pu: default {
drive-strength = <16>;
bias-pull-up;
};
};
2.2 Kernel Config
CONFIG_RC_CORE=y
CONFIG_IR_NEC_DECODER=y
CONFIG_MEDIA_RC_SUPPORT=y
CONFIG_IR_GPIO_CIR=y
2.3 Keys Timeout
2.3.1 Kernel Hardcode
diff --git a/drivers/media/rc/ir-raw.c b/drivers/media/rc/ir-raw.c
index 5c42750..1be6592 100644
--- a/drivers/media/rc/ir-raw.c
+++ b/drivers/media/rc/ir-raw.c
@@ -116,7 +116,8 @@ int ir_raw_event_store_edge(struct rc_dev *dev, enum raw_eve
now = ktime_get();
delta = ktime_to_ns(ktime_sub(now, dev->raw->last_event));
- delay = MS_TO_NS(dev->input_dev->rep[REP_DELAY]);
+ //delay = MS_TO_NS(dev->input_dev->rep[REP_DELAY]);
+ delay = MS_TO_NS(250); // 500
2.3.2 Disable Framework Reset Timeout
diff --git
services/inputflinger/EventHub.cpp b/services/inputflinger/EventHub.cpp
index dfe5d3d..c40bd8f 100644
--- a/services/inputflinger/EventHub.cpp
+++ b/services/inputflinger/EventHub.cpp
@@ -1050,6 +1050,7 @@ static const int32_t GAMEPAD_KEYCODES[] = {
status_t EventHub::openDeviceLocked(const char *devicePath) {
char buffer[80];
+ char oem_cache_devname[80];
ALOGV("Opening device: %s", devicePath);
@@ -1067,6 +1068,7 @@ status_t EventHub::openDeviceLocked(const char *devicePath) {
} else {
buffer[sizeof(buffer) - 1] = '\0';
identifier.name.setTo(buffer);
+ strcpy(oem_cache_devname, buffer);
}
// Check to see if the device is on our excluded list
@@ -1270,9 +1272,11 @@ status_t EventHub::openDeviceLocked(const char *devicePath) {
// Disable kernel key repeat since we handle it ourselves
unsigned int repeatRate[] = {0,0};
- if (ioctl(fd, EVIOCSREP, repeatRate)) {
- ALOGW("Unable to disable kernel key repeat for %s: %s",
- devicePath, strerror(errno));
- }
+ if (0 != strcmp(oem_cache_devname, "gpio_ir_recv")) {
+ if (ioctl(fd, EVIOCSREP, repeatRate)) {
+ ALOGW("Unable to disable kernel key repeat for %s: %s",
+ devicePath, strerror(errno));
+ }
+ }
}
相关文章:

Android GPIO方式解码红外数据
1 红外遥控协议 1.1 基本概念 1)NEC协议,采用PWM方式调制。38KHz载波,一般是由引导码地址码地址反码数据数据反码构成。 遥控接收头端收到的信号为:逻辑1是560us低1680us高,逻辑0是560us低560us高。 地址:u…...

基于SpringBoot+Vue的益农智慧服务平台【提供源码+答辩PPT+参考文档+项目部署】
一、项目技术架构: 本项目是一款SpringBoot益农平台的设计与实现。 该SpringBootVue的益农平台的设计与实现,后端采用SpringBoot架构,前端采用VueElementUI实现页面的快速开发,并使用关系型数据库MySQL存储系统运行数据。本系统分…...

基于springboot的在线考试与学习交流网页
作者:计算机学长阿伟 开发技术:SpringBoot、SSM、Vue、MySQL、ElementUI等,“文末源码”。 系统展示 【2024最新】基于JavaSpringBootVueMySQL的,前后端分离。 开发语言:Java数据库:MySQL技术:…...
:rxjs与Vue、React、Angular框架集成及跨框架状态管理实现原理)
JS异步编程进阶(二):rxjs与Vue、React、Angular框架集成及跨框架状态管理实现原理
在现代前端开发中,异步操作已经成为不可或缺的一部分。无论是处理网络请求、响应用户输入,还是监听外部事件,异步编程模式始终占据重要位置。而RxJS作为功能强大的异步编程库,广泛应用于多个框架之中,如Vue、React、An…...

nginx web代理
目录 1.nginx的简单介绍 2.正向代理的应用场景 2.1做访问控制 2.2审计 2.3负载分散 2.4隐私保护和匿名性 3.反向代理的应用场景如下 3.1.负载均衡 2.缓存静态内容 3.压缩和优化内容 4.提供故障转移 5.安全性和匿名性 4.正向代理 4.1web端 4.2lb01代理服务器…...

人形机器人的关节控制
人形机器人的关节控制是机器人技术中的核心环节之一,它直接关系到机器人的运动灵活性、精确度和稳定性。 一、关节结构与设计 人形机器人的关节结构通常包括底座、内圈、外圈和滚珠等组件,这些组件共同构成了关节的旋转和支撑系统。关节的设计需要考虑到承载能力、稳定性以…...

python 爬虫 入门 二、数据解析(正则、bs4、xpath)
目录 一、待匹配数据获取 二、正则 三、bs4 (一)、访问属性 (二)、获取标签的值 (三)、查询方法 四、xpath 后续:登录和代理 上一节我们已经知道了如何向服务器发送请求以获得数据&#x…...

PTX 汇编代码语法
PTX(Parallel Thread Execution)汇编是 NVIDIA 为其 GPU 提供的一种并行指令集架构(ISA),用于编写 GPU 设备代码。PTX 是一种中间表示(IR),在 CUDA 代码编译时生成,之后会…...

【mysql】统计两个相邻任务/事件的间隔时间以及每个任务的平均用时
准备步骤1. 设置查询参数部分1.1 设置需要分析的起始时间1.2. 设置需要分析的时间的长度(分析的结束时间)1.3. 设置分析内容1.4. 设置需要分析的表和字段 2. 自动计算分析2.1 设置起始序号2.2. 筛选user_log表数据并生成带序号的临时表temp_ria2.3. 通过…...

RHCE——笔记
第一章——例行性工作 1:单一致性的例行性工作 仅处理执行一次就结束 at命令 /etc/at.allow —— 写在该文件的人可以使用at命令 /etc/at.deny —— 黑名单 两个文件都不存在,则只有root可以使用 #at工作调度对应的系统服务 [rootlocalhost ~]# p…...

Spring Boot在知识管理中的应用
1系统概述 1.1 研究背景 如今互联网高速发展,网络遍布全球,通过互联网发布的消息能快而方便的传播到世界每个角落,并且互联网上能传播的信息也很广,比如文字、图片、声音、视频等。从而,这种种好处使得互联网成了信息传…...

OpenCV高级图形用户界面(14)交互式地选择一个或多个感兴趣区域函数selectROIs()的使用
操作系统:ubuntu22.04 OpenCV版本:OpenCV4.9 IDE:Visual Studio Code 编程语言:C11 算法描述 允许用户在给定的图像上选择多个 ROI。 该函数创建一个窗口,并允许用户使用鼠标来选择多个 ROI。控制方式:使用空格键或…...

字节青训营入营考核部分题解
题库链接:https://juejin.cn/problemset?utm_sourceschool&utm_mediumyouthcamp&utm_campaignexamine 1. 计算从x到y的最小步数 问题描述 AB 实验同学每天都很苦恼如何可以更好地进行 AB 实验,每一步的流程很重要,我们目标为了…...

Android调用系统打印图片
拍摄和分享照片是移动设备最受欢迎的用途之一。如果您的应用 拍摄照片、展示照片或允许用户分享图片,则应考虑启用打印功能 和图片。Android 支持库提供了一个便捷的功能,支持使用 只需编写极少的代码和一组简单的打印版式选项。 本节课介绍如何使用 v4…...

网络最快的速度光速,因此‘‘光网络‘‘由此产生
世界上有一种最快的速度又是光,以前传统以太网络规划满足不了现在的需求。 一 有线网规划 二 无线网规划...
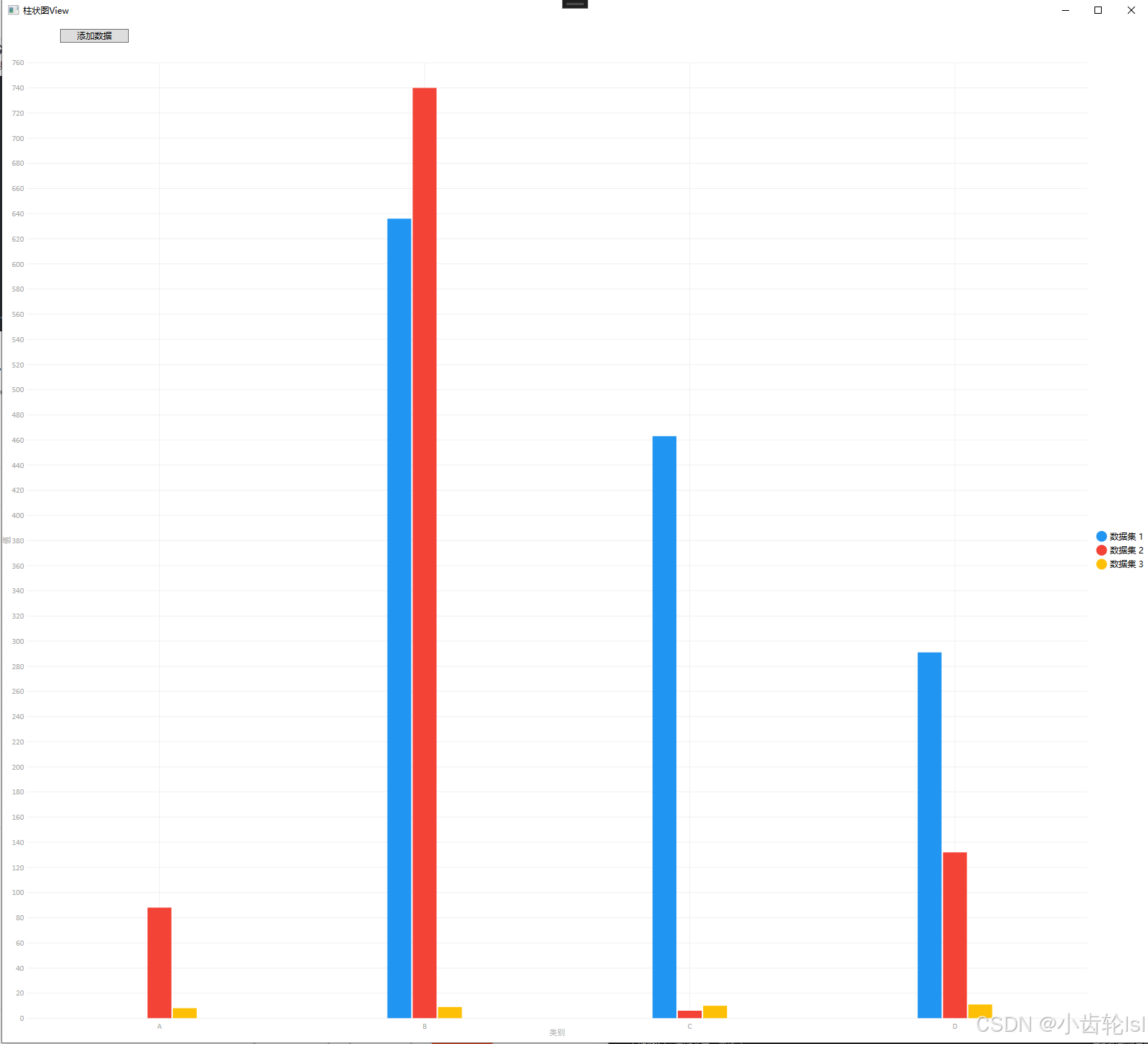
WPF -- LiveCharts的使用和源码
LiveCharts 是一个开源的 .NET 图表库,特别适用于 WPF、WinForms 和其他 .NET 平台。它提供了丰富的图表类型和功能,使开发者能够轻松地在应用程序中创建动态和交互式图表。下面我将使用WPF平台创建一个测试实例。 一、LiveCharts的安装和使用 1.安装N…...

spring 如何将mutipartFile转存到本地磁盘
两者的区别和联系 MutipartFile是spring的一部分,File则是java的标准类MutipartFile用于接收web传递的文件,File操作本地系统的文件 MutipartFile 转换File的三种方式 使用MutipartFile 自带的transferTo方法使用java自带的FileOutPutStream流使用java自…...

【学术会议-6】激发灵感-计算机科学与技术学术会议邀您参与,共享学术盛宴,塑造明天的科技梦想!
【学术会议-6】激发灵感-计算机科学与技术学术会议邀您参与,共享学术盛宴,塑造明天的科技梦想! 【学术会议-6】激发灵感-计算机科学与技术学术会议邀您参与,共享学术盛宴,塑造明天的科技梦想! 文章目录 【…...
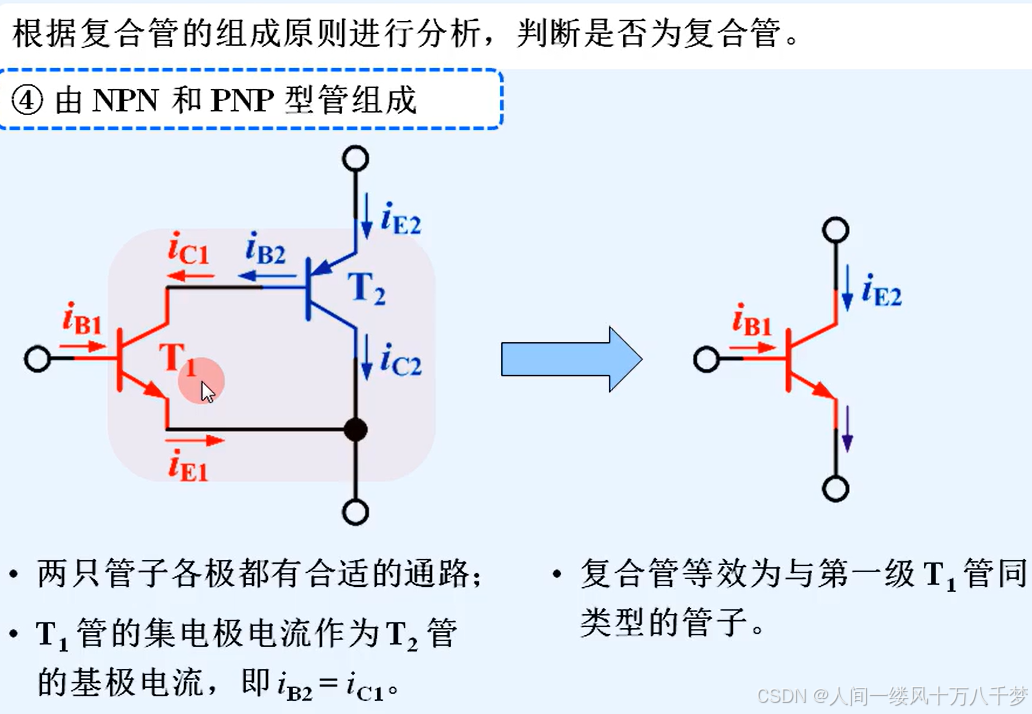
模电基础(晶体管放大电路)
1.放大电路 1.1基本共射放大电路工作原理 1.1.1电路的组成和作用 各器件的作用 (1)(交流电源):输入电路的有用信号,也就是我们需要去放大的信号 (2)(反馈…...
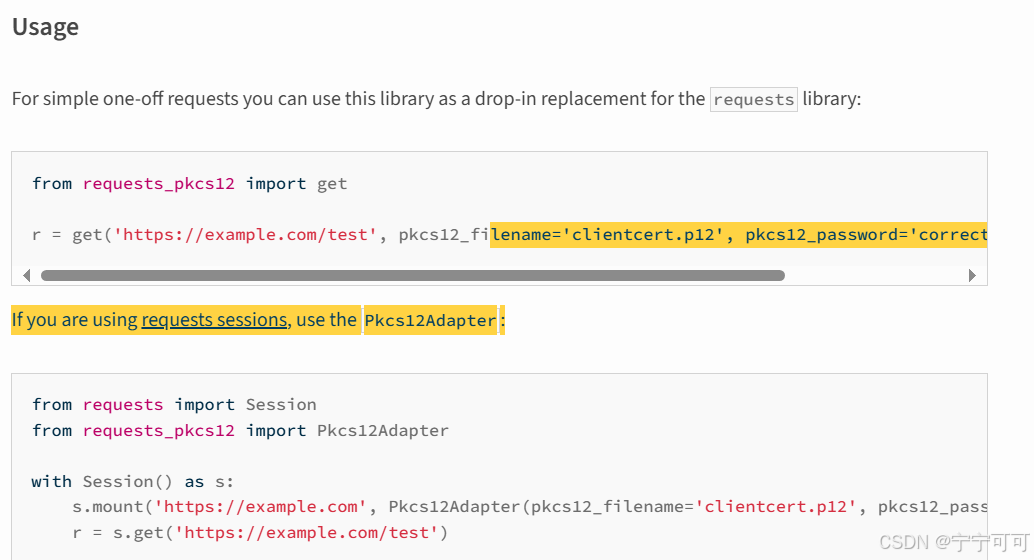
Python3 接口自动化测试,HTTPS下载文件(GET方法和POST方法)
Python3 接口自动化测试,HTTPS下载文件(GET方法和POST方法) requests-pkcs12 PyPI python中如何使用requests模块下载文件并获取进度提示 1、GET方法 1.1、调用 # 下载客户端(GET)def download_client_get(self, header_all):try:url = self.host + "/xxx/v1/xxx-mod…...

Hirschmann RS20-0800M4M4SDAE工业以太网交换机
Hirschmann RS20-0800M4M4SDAE 工业以太网交换机产品特点:端口配置:共8个端口,含6个RJ45电口和2个ST光纤接口。端口速率:所有端口均为100Mbps快速以太网。光纤类型:2个光纤端口为多模、ST接头。管理类型:二…...

告别手写UI!用NXP GUI Guider拖拽设计LVGL界面,5分钟搞定音乐播放器Demo
嵌入式UI开发革命:5分钟用GUI Guider构建LVGL音乐播放器在嵌入式系统开发中,用户界面(UI)设计曾长期是工程师的痛点——既要考虑资源受限的硬件环境,又要实现流畅美观的交互体验。传统手动编写UI代码的方式不仅效率低下,调试过程更…...
)
毕业设计 yolov11骨折检测医疗辅助系统(源码+论文)
文章目录 0 前言1 项目运行效果2 课题背景2.1 研究背景2.2 国内外研究现状2.3 研究意义 3 设计框架(骨折检测系统设计框架说明)3.1. 系统架构图3.2. 技术选型3.2.1 核心组件3.2.2 辅助工具 3.3. 核心模块设计3.3.1 YOLO模型训练模块训练流程图关键伪代码…...
)
别再死磕USB HID了!用ESP32的Arduino框架手把手教你实现蓝牙鼠标键盘(附完整代码)
ESP32蓝牙HID实战:零基础打造自定义键盘鼠标 手里那块吃灰的ESP32开发板终于能派上用场了!上周我用它做了个无线演示控制器,在会议室里走着就能翻PPT,同事们都问是怎么实现的。其实秘诀就在于ESP32的蓝牙HID功能——不需要任何USB…...

GEO优化可以覆盖哪些搜索平台
这是一个非常现实的问题。企业投放资源做GEO,当然希望覆盖面越广越好。那么GEO优化到底能覆盖哪些平台?覆盖到什么程度?不同平台的GEO逻辑有什么差异?GEO平台覆盖的三个层级第一层级:通用大模型AI平台(核心…...

别再盲调temperature=0.2!DeepSeek补全效果突变的4个隐藏参数,资深架构师压箱底调参清单
更多请点击: https://intelliparadigm.com 第一章:别再盲调temperature0.2!DeepSeek补全效果突变的4个隐藏参数,资深架构师压箱底调参清单 DeepSeek-R1/VL 等开源大模型在实际部署中,仅靠调节 temperature 往往收效甚…...

AICoverGen终极指南:快速创建AI翻唱歌曲的完整教程
AICoverGen终极指南:快速创建AI翻唱歌曲的完整教程 【免费下载链接】AICoverGen A WebUI to create song covers with any RVC v2 trained AI voice from YouTube videos or audio files. 项目地址: https://gitcode.com/gh_mirrors/ai/AICoverGen 想要让你的…...

为内部知识库问答机器人集成taotoken多模型能力的架构设计
🚀 告别海外账号与网络限制!稳定直连全球优质大模型,限时半价接入中。 👉 点击领取海量免费额度 为内部知识库问答机器人集成taotoken多模型能力的架构设计 应用场景类,探讨为企业内部知识库构建智能问答机器人时&…...

从零开始构建个人知识库:kepano-obsidian笔记模板完整指南
从零开始构建个人知识库:kepano-obsidian笔记模板完整指南 【免费下载链接】kepano-obsidian My personal Obsidian vault template. A bottom-up approach to note-taking and organizing things I am interested in. 项目地址: https://gitcode.com/gh_mirrors/…...
)
Lovable后端集成方案深度拆解(含Spring Boot 3.2+GraalVM+OpenTelemetry完整Demo)
更多请点击: https://kaifayun.com 第一章:Lovable后端集成方案全景概览 Lovable 是一个面向现代 Web 应用的轻量级后端协作框架,其核心设计理念是“可组合、可观测、可演进”。它不绑定特定语言或运行时,而是通过标准化协议与契…...