深入解析 Harris 角点检测算法:从孔径问题到响应函数的完整推导
在图像处理中,角点是非常重要的特征。为了快速、准确地检测角点,Harris 提出了 Harris 角点检测算法,它基于局部窗口内图像梯度的变化来判断角点。本文将从最基础的孔径问题(Aperture Problem)入手,通过泰勒展开和向量乘法的形式逐步推导 Harris 角点检测的过程,并给出特征值分析和角响应函数的详细解释。
1. 孔径问题的引入
孔径问题常用“理发店门前转灯”进行类比说明。你可以想象一个横着旋转的灯,它看起来像是垂直方向移动,但实际上是水平方向转动。

- 感觉上:垂直移动
- 实际情况:水平旋转
在计算机视觉中,光流的计算就面临类似的问题:在仅有一个小窗口的情况下,无法确定物体的移动方向,尤其在物体具有某种平滑性时,感知的运动方向和实际运动方向可能不一致。这就是“孔径问题”。
2. 图像函数的平移与泰勒展开
在处理图像时,假设我们有一幅灰度图像,它的像素值可以用函数 I ( x , y ) I(x, y) I(x,y) 来表示。这里 x x x 和 y y y 是图像的空间坐标, I ( x , y ) I(x, y) I(x,y) 是在这个点上的像素强度值。Harris 算子的基本思想是当图像发生微小平移时,通过分析像素强度的变化来判断该区域是角点、边缘还是平坦区域。
图像的平移
考虑图像的某个点发生了微小的平移,即从 ( x , y ) (x, y) (x,y) 平移到 ( x + u , y + v ) (x + u, y + v) (x+u,y+v)。那么,经过平移后的像素强度可以表示为 I ( x + u , y + v ) I(x+u, y+v) I(x+u,y+v),如图所示

在处理图像时,假设我们有一幅灰度图像,它的像素值可以用函数 I ( x , y ) I(x, y) I(x,y) 来表示。这里 x x x 和 y y y 是图像的空间坐标, I ( x , y ) I(x, y) I(x,y) 是在这个点上的像素强度值。Harris 算子的基本思想是当图像发生微小平移时,通过分析像素强度的变化来判断该区域是角点、边缘还是平坦区域。
图像的平移
考虑图像的某个点发生了微小的平移,即从 ( x , y ) (x, y) (x,y) 平移到 ( x + u , y + v ) (x + u, y + v) (x+u,y+v)。那么,经过平移后的像素强度可以表示为 I ( x + u , y + v ) I(x+u, y+v) I(x+u,y+v)。
为了简化问题,我们假设这个位移很小,因此可以使用 泰勒展开 对 I ( x + u , y + v ) I(x+u, y+v) I(x+u,y+v) 进行近似:
I ( x + u , y + v ) ≈ I ( x , y ) + u ∂ I ∂ x + v ∂ I ∂ y + 高阶项 I(x+u, y+v) \approx I(x, y) + u \frac{\partial I}{\partial x} + v \frac{\partial I}{\partial y} + \text{高阶项} I(x+u,y+v)≈I(x,y)+u∂x∂I+v∂y∂I+高阶项
其中:
- ∂ I ∂ x \frac{\partial I}{\partial x} ∂x∂I 表示图像在 x x x 方向的梯度,记为 I x I_x Ix;
- ∂ I ∂ y \frac{\partial I}{\partial y} ∂y∂I 表示图像在 y y y 方向的梯度,记为 I y I_y Iy。
因此,我们可以将上式简化为:
I ( x + u , y + v ) ≈ I ( x , y ) + I x u + I y v I(x+u, y+v) \approx I(x, y) + I_x u + I_y v I(x+u,y+v)≈I(x,y)+Ixu+Iyv
这个式子告诉我们,当图像发生微小的平移时,像素值的变化可以通过图像梯度来近似表示。
3. 构造能量函数
在 Harris 角点检测中,关键思想是比较位移前后的像素强度差异,构造一个 能量函数 来度量这种差异。能量函数 E ( u , v ) E(u, v) E(u,v) 描述了图像在窗口 W W W 内的像素强度变化,它定义为:
E ( u , v ) = ∑ ( x , y ) ∈ W ω ( x , y ) [ I ( x + u , y + v ) − I ( x , y ) ] 2 E(u, v) = \sum_{(x, y) \in W} \omega(x, y) \left[ I(x+u, y+v) - I(x, y) \right]^2 E(u,v)=(x,y)∈W∑ω(x,y)[I(x+u,y+v)−I(x,y)]2
其中:
-
ω ( x , y ) \omega(x, y) ω(x,y) 是一个权重函数,通常用于加权窗口内不同像素的影响。权重函数可以是均匀分布的矩形窗口,也可以是高斯加权窗口,如图片所示的两种形式。
- 矩形窗口:窗口内像素权重为 1,外部为 0;
- 高斯窗口:窗口内的像素权重按照高斯分布递减,使得靠近中心的像素有更大的影响。

代入泰勒展开的结果 I ( x + u , y + v ) ≈ I ( x , y ) + I x u + I y v I(x+u, y+v) \approx I(x, y) + I_x u + I_y v I(x+u,y+v)≈I(x,y)+Ixu+Iyv,能量函数可以近似表示为:
E ( u , v ) ≈ ∑ ( x , y ) ∈ W ω ( x , y ) [ I x u + I y v ] 2 E(u, v) \approx \sum_{(x, y) \in W} \omega(x, y) \left[ I_x u + I_y v \right]^2 E(u,v)≈(x,y)∈W∑ω(x,y)[Ixu+Iyv]2
这一步已经将图像的位移引入到了能量函数中,它通过计算窗口内像素的变化来判断图像的局部特性。
4. 向量乘法形式的能量函数
为了便于计算和进一步分析,我们可以将上述能量函数写成矩阵形式。先将 I x u + I y v I_x u + I_y v Ixu+Iyv 写成向量形式:
I x u + I y v = [ I x I y ] [ u v ] I_x u + I_y v = \begin{bmatrix} I_x & I_y \end{bmatrix} \begin{bmatrix} u \\ v \end{bmatrix} Ixu+Iyv=[IxIy][uv]
因此,能量函数 E ( u , v ) E(u, v) E(u,v) 可以写成:
E ( u , v ) = ∑ ( x , y ) ∈ W ω ( x , y ) [ u v ] [ I x 2 I x I y I x I y I y 2 ] [ u v ] E(u, v) = \sum_{(x, y) \in W} \omega(x, y) \begin{bmatrix} u & v \end{bmatrix} \begin{bmatrix} I_x^2 & I_x I_y \\ I_x I_y & I_y^2 \end{bmatrix} \begin{bmatrix} u \\ v \end{bmatrix} E(u,v)=(x,y)∈W∑ω(x,y)[uv][Ix2IxIyIxIyIy2][uv]
进一步,我们定义一个称为 结构张量(M) 的矩阵:
M = ∑ ( x , y ) ∈ W ω ( x , y ) [ I x 2 I x I y I x I y I y 2 ] M = \sum_{(x, y) \in W} \omega(x, y) \begin{bmatrix} I_x^2 & I_x I_y \\ I_x I_y & I_y^2 \end{bmatrix} M=(x,y)∈W∑ω(x,y)[Ix2IxIyIxIyIy2]
于是,能量函数可以简化为:
E ( u , v ) = [ u v ] M [ u v ] E(u, v) = \begin{bmatrix} u & v \end{bmatrix} M \begin{bmatrix} u \\ v \end{bmatrix} E(u,v)=[uv]M[uv]
这就是 Harris 算子中能量函数的向量乘法形式,它为后续的特征值分析奠定了基础。
5. 特征值分析
我们通过特征值分解对结构张量 M M M 进行分析。这个张量 M M M 表示的是图像局部区域的梯度信息,它的特征值 λ 1 \lambda_1 λ1 和 λ 2 \lambda_2 λ2 反映了不同方向上的强度变化。
- λ 1 \lambda_1 λ1 和 λ 2 \lambda_2 λ2 是 M M M 的特征值,它们描述了图像在不同方向上的梯度变化程度。根据特征值的大小关系,我们可以判断局部区域的图像结构。
特征值分解可以写为:
M = R − 1 [ λ 1 0 0 λ 2 ] R M = R^{-1} \begin{bmatrix} \lambda_1 & 0 \\ 0 & \lambda_2 \end{bmatrix} R M=R−1[λ100λ2]R
其中, R R R 是旋转矩阵,用来将图像的局部梯度信息旋转到与特征值对应的方向上。

平坦区域:
- 如果 λ 1 \lambda_1 λ1 和 λ 2 \lambda_2 λ2 都很小,表示在该区域内无论在哪个方向上图像的强度变化都非常小。这意味着该区域是平坦的,图像强度几乎不变。这种区域通常位于图像的背景或均匀纹理处。
- 如图中所示,梯度图的分布在平坦区域非常集中, λ 1 \lambda_1 λ1 和 λ 2 \lambda_2 λ2 都接近零。
边缘区域:
- 如果 λ 1 \lambda_1 λ1 很大,而 λ 2 \lambda_2 λ2 很小,意味着该区域沿着一个方向(通常是边缘的方向)有较大的强度变化,而垂直于该方向的变化非常小。这种情况典型地表示 边缘区域 。
- 从梯度图中可以看出,在边缘区域,数据点呈现拉长的形状,意味着图像沿某一个方向(边缘方向)变化明显,而另一方向上的变化不显著。
角点区域:
- 如果 λ 1 \lambda_1 λ1 和 λ 2 \lambda_2 λ2 都很大,表示图像在该区域内的各个方向都有较大的强度变化。这意味着无论图像在水平或垂直方向移动,都会导致显著的变化,因此可以认为该区域是角点。
- 角点区域在梯度图中显示为近似圆形的分布,表示在多个方向上都有显著的梯度变化。
7. Harris 响应函数
为了快速判断角点,Harris 引入了一个角响应函数:
θ = det ( M ) − α ⋅ trace ( M ) 2 \theta = \det(M) - \alpha \cdot \text{trace}(M)^2 θ=det(M)−α⋅trace(M)2
其中:
- det ( M ) = λ 1 λ 2 \det(M) = \lambda_1 \lambda_2 det(M)=λ1λ2 是矩阵的行列式,表示局部窗口中图像的总变化。
- trace ( M ) = λ 1 + λ 2 \text{trace}(M) = \lambda_1 + \lambda_2 trace(M)=λ1+λ2 是矩阵的迹,表示图像的总强度变化。
- α \alpha α 是经验常数,通常取 0.04 到 0.06。
假设有一个 2 × 2 2 \times 2 2×2 的矩阵:
M = ( 3 2 4 5 ) M = \begin{pmatrix} 3 & 2 \\ 4 & 5 \end{pmatrix} M=(3425)
矩阵的迹为对角线元素的和,即:
trace ( M ) = 3 + 5 = 8 \text{trace}(M) = 3 + 5 = 8 trace(M)=3+5=8
在这个例子中,迹等于 8,表示该矩阵的总强度变化。在物理或图像处理应用中,迹可以用来表示某些总量,如能量、强度等。
通过计算这个响应函数 θ \theta θ,我们可以判断局部区域是否是角点:
- 角点(Corner):
当 λ 1 \lambda_1 λ1 和 λ 2 \lambda_2 λ2 都较大时,说明图像的强度在 x x x 和 y y y 方向上都有明显的变化,即梯度变化较大。这种情况通常发生在角点或交叉点处。 - 边缘(Edge):
当 λ 1 \lambda_1 λ1 较大而 λ 2 \lambda_2 λ2 较小(或相反)时,说明图像在一个方向上有明显变化,而另一个方向上变化较小。此时,局部区域更可能是边缘。 - 平坦区域(Flat Region):
当 λ 1 \lambda_1 λ1 和 λ 2 \lambda_2 λ2 都较小时,说明图像在该区域内没有明显的强度变化(例如,在均匀的平坦区域)。此时,响应函数值 θ \theta θ 也会很小。
8. Harris 算子的优缺点
Harris 角点检测算法能够有效地检测出图像中的角点,并且对图像的 旋转具有较好的不变性 。然而,它也有一些局限性:
- 对尺度不变性较差:Harris 算法对图像缩放不敏感,因此对于不同尺度的图像角点检测效果不佳。
- 容易受到噪声影响:如果图像中存在较多噪声,梯度计算可能会受到干扰,导致角点检测结果不准确。
为了克服这些局限性,常常会将 Harris 角点检测与其他特征提取算法(例如 SIFT 或 SURF)结合使用,以提升检测的鲁棒性。
相关文章:
深入解析 Harris 角点检测算法:从孔径问题到响应函数的完整推导
在图像处理中,角点是非常重要的特征。为了快速、准确地检测角点,Harris 提出了 Harris 角点检测算法,它基于局部窗口内图像梯度的变化来判断角点。本文将从最基础的孔径问题(Aperture Problem)入手,通过泰勒…...
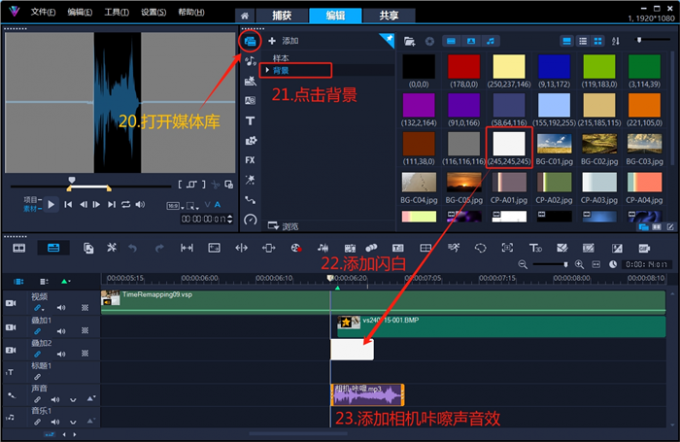
抖音视频制作怎么暂停画面,抖音视频怎么让它有暂停的效果
千万别滥用视频特效,不然它能毁掉你的抖音作品。在创作过程中,应尽量使用类似暂停画面、隐形字幕这样的视觉特效,可以显著提高作品的视觉体验。增强视频表现力的同时,也不会让画面看起来过于夸张。有关抖音视频制作怎么暂停画面的…...

Android GPIO方式解码红外数据
1 红外遥控协议 1.1 基本概念 1)NEC协议,采用PWM方式调制。38KHz载波,一般是由引导码地址码地址反码数据数据反码构成。 遥控接收头端收到的信号为:逻辑1是560us低1680us高,逻辑0是560us低560us高。 地址:u…...

基于SpringBoot+Vue的益农智慧服务平台【提供源码+答辩PPT+参考文档+项目部署】
一、项目技术架构: 本项目是一款SpringBoot益农平台的设计与实现。 该SpringBootVue的益农平台的设计与实现,后端采用SpringBoot架构,前端采用VueElementUI实现页面的快速开发,并使用关系型数据库MySQL存储系统运行数据。本系统分…...

基于springboot的在线考试与学习交流网页
作者:计算机学长阿伟 开发技术:SpringBoot、SSM、Vue、MySQL、ElementUI等,“文末源码”。 系统展示 【2024最新】基于JavaSpringBootVueMySQL的,前后端分离。 开发语言:Java数据库:MySQL技术:…...
:rxjs与Vue、React、Angular框架集成及跨框架状态管理实现原理)
JS异步编程进阶(二):rxjs与Vue、React、Angular框架集成及跨框架状态管理实现原理
在现代前端开发中,异步操作已经成为不可或缺的一部分。无论是处理网络请求、响应用户输入,还是监听外部事件,异步编程模式始终占据重要位置。而RxJS作为功能强大的异步编程库,广泛应用于多个框架之中,如Vue、React、An…...

nginx web代理
目录 1.nginx的简单介绍 2.正向代理的应用场景 2.1做访问控制 2.2审计 2.3负载分散 2.4隐私保护和匿名性 3.反向代理的应用场景如下 3.1.负载均衡 2.缓存静态内容 3.压缩和优化内容 4.提供故障转移 5.安全性和匿名性 4.正向代理 4.1web端 4.2lb01代理服务器…...

人形机器人的关节控制
人形机器人的关节控制是机器人技术中的核心环节之一,它直接关系到机器人的运动灵活性、精确度和稳定性。 一、关节结构与设计 人形机器人的关节结构通常包括底座、内圈、外圈和滚珠等组件,这些组件共同构成了关节的旋转和支撑系统。关节的设计需要考虑到承载能力、稳定性以…...

python 爬虫 入门 二、数据解析(正则、bs4、xpath)
目录 一、待匹配数据获取 二、正则 三、bs4 (一)、访问属性 (二)、获取标签的值 (三)、查询方法 四、xpath 后续:登录和代理 上一节我们已经知道了如何向服务器发送请求以获得数据&#x…...

PTX 汇编代码语法
PTX(Parallel Thread Execution)汇编是 NVIDIA 为其 GPU 提供的一种并行指令集架构(ISA),用于编写 GPU 设备代码。PTX 是一种中间表示(IR),在 CUDA 代码编译时生成,之后会…...

【mysql】统计两个相邻任务/事件的间隔时间以及每个任务的平均用时
准备步骤1. 设置查询参数部分1.1 设置需要分析的起始时间1.2. 设置需要分析的时间的长度(分析的结束时间)1.3. 设置分析内容1.4. 设置需要分析的表和字段 2. 自动计算分析2.1 设置起始序号2.2. 筛选user_log表数据并生成带序号的临时表temp_ria2.3. 通过…...

RHCE——笔记
第一章——例行性工作 1:单一致性的例行性工作 仅处理执行一次就结束 at命令 /etc/at.allow —— 写在该文件的人可以使用at命令 /etc/at.deny —— 黑名单 两个文件都不存在,则只有root可以使用 #at工作调度对应的系统服务 [rootlocalhost ~]# p…...

Spring Boot在知识管理中的应用
1系统概述 1.1 研究背景 如今互联网高速发展,网络遍布全球,通过互联网发布的消息能快而方便的传播到世界每个角落,并且互联网上能传播的信息也很广,比如文字、图片、声音、视频等。从而,这种种好处使得互联网成了信息传…...

OpenCV高级图形用户界面(14)交互式地选择一个或多个感兴趣区域函数selectROIs()的使用
操作系统:ubuntu22.04 OpenCV版本:OpenCV4.9 IDE:Visual Studio Code 编程语言:C11 算法描述 允许用户在给定的图像上选择多个 ROI。 该函数创建一个窗口,并允许用户使用鼠标来选择多个 ROI。控制方式:使用空格键或…...

字节青训营入营考核部分题解
题库链接:https://juejin.cn/problemset?utm_sourceschool&utm_mediumyouthcamp&utm_campaignexamine 1. 计算从x到y的最小步数 问题描述 AB 实验同学每天都很苦恼如何可以更好地进行 AB 实验,每一步的流程很重要,我们目标为了…...

Android调用系统打印图片
拍摄和分享照片是移动设备最受欢迎的用途之一。如果您的应用 拍摄照片、展示照片或允许用户分享图片,则应考虑启用打印功能 和图片。Android 支持库提供了一个便捷的功能,支持使用 只需编写极少的代码和一组简单的打印版式选项。 本节课介绍如何使用 v4…...

网络最快的速度光速,因此‘‘光网络‘‘由此产生
世界上有一种最快的速度又是光,以前传统以太网络规划满足不了现在的需求。 一 有线网规划 二 无线网规划...
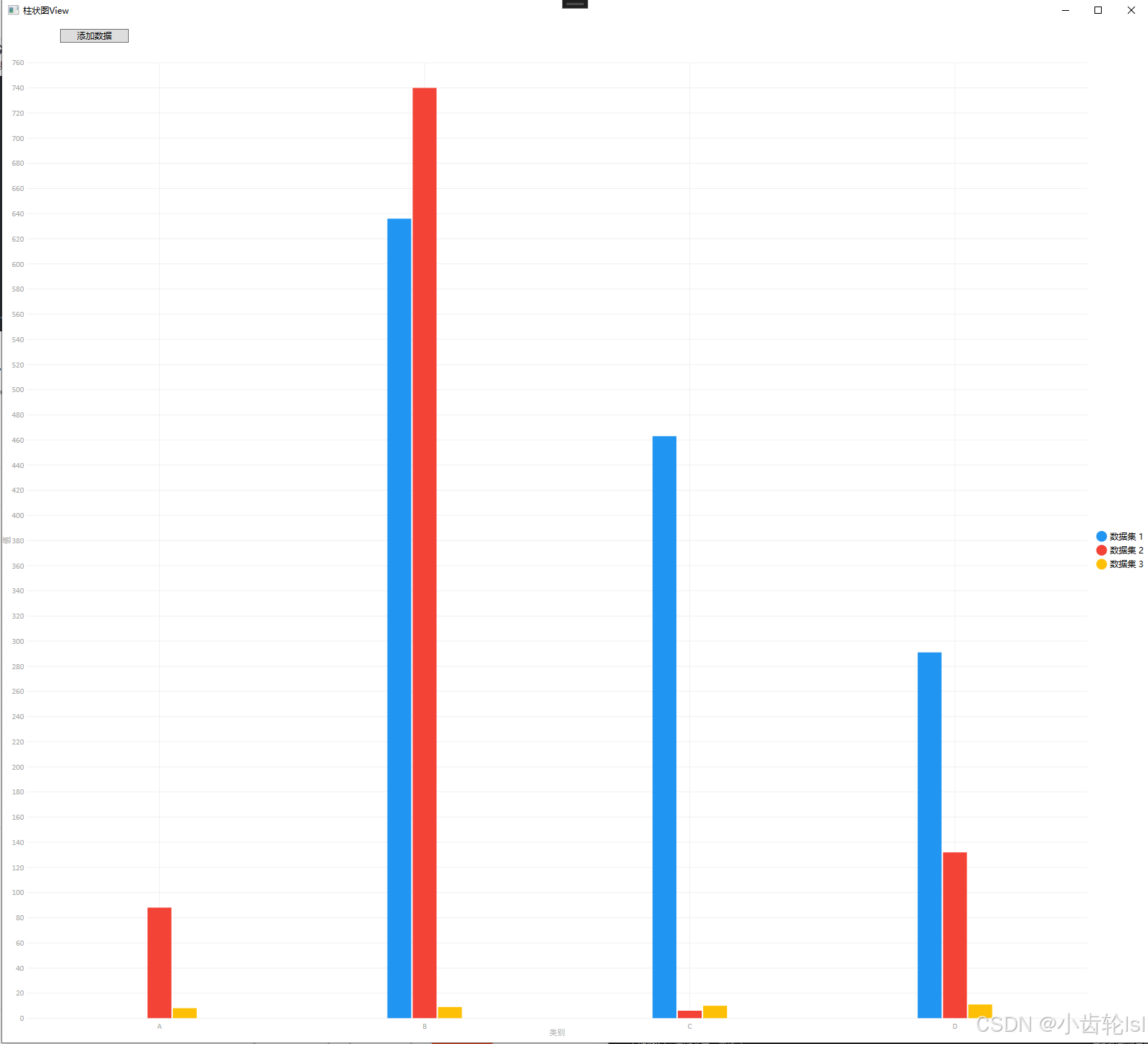
WPF -- LiveCharts的使用和源码
LiveCharts 是一个开源的 .NET 图表库,特别适用于 WPF、WinForms 和其他 .NET 平台。它提供了丰富的图表类型和功能,使开发者能够轻松地在应用程序中创建动态和交互式图表。下面我将使用WPF平台创建一个测试实例。 一、LiveCharts的安装和使用 1.安装N…...

spring 如何将mutipartFile转存到本地磁盘
两者的区别和联系 MutipartFile是spring的一部分,File则是java的标准类MutipartFile用于接收web传递的文件,File操作本地系统的文件 MutipartFile 转换File的三种方式 使用MutipartFile 自带的transferTo方法使用java自带的FileOutPutStream流使用java自…...

【学术会议-6】激发灵感-计算机科学与技术学术会议邀您参与,共享学术盛宴,塑造明天的科技梦想!
【学术会议-6】激发灵感-计算机科学与技术学术会议邀您参与,共享学术盛宴,塑造明天的科技梦想! 【学术会议-6】激发灵感-计算机科学与技术学术会议邀您参与,共享学术盛宴,塑造明天的科技梦想! 文章目录 【…...

Claude in Excel:原生集成的AI表格协作者
1. 项目概述:这不是插件,是Excel里长出来的AI同事“Claude in Excel”这个标题刚看到时,我下意识点开几个技术社区翻了一圈,发现多数人第一反应是:“又一个AI插件?”——其实完全不是。它根本没走传统Offic…...

告别虚拟机卡顿:在Windows 11的WSL2里搞定Lichee Nano交叉编译环境
告别虚拟机卡顿:在Windows 11的WSL2里搞定Lichee Nano交叉编译环境 对于嵌入式开发者来说,配置开发环境往往是个令人头疼的问题。传统虚拟机方案虽然能提供完整的Linux体验,但资源占用高、启动慢、与宿主系统交互不便等问题一直困扰着开发者。…...

我们公司全员把 Cursor 换成了自研的 全开源AtomCode
【引子】这是一篇实录——一位 CTO 用 28 天,用 Claude GLM 双模型调度,造出了一个让全公司放弃 Cursor 的工具。然后我意识到我们正在经历的事情,比"换工具"大得多。【读者承诺】接下来 15 分钟,你会拿到三件东西:一个真实案例(28 天 1,146 commits 是怎么做出来的…...
)
Unity3D深度纹理实战:手把手教你实现可交互的激光雷达扫描特效(附完整C#/Shader代码)
Unity3D深度纹理实战:手把手教你实现可交互的激光雷达扫描特效(附完整C#/Shader代码)在科幻题材的游戏开发中,激光雷达扫描特效是营造科技感的经典元素。从《赛博朋克2077》的战术目镜到《看门狗》的环境扫描,这种动态…...

UE4SS终极指南:从零开始掌握虚幻引擎脚本系统
UE4SS终极指南:从零开始掌握虚幻引擎脚本系统 【免费下载链接】RE-UE4SS Injectable LUA scripting system, SDK generator, live property editor and other dumping utilities for UE4/5 games 项目地址: https://gitcode.com/gh_mirrors/re/RE-UE4SS UE4S…...

taotoken用量看板如何帮助团队精细化管理api调用成本
🚀 告别海外账号与网络限制!稳定直连全球优质大模型,限时半价接入中。 👉 点击领取海量免费额度 taotoken用量看板如何帮助团队精细化管理api调用成本 对于团队管理者而言,将大模型能力集成到产品开发或业务流程中&am…...

AI Agent 为什么必须有“记忆系统”?
导语:大模型不是没有智商,而是经常没有“记性”。真正能长期干活的 Agent,不是靠无限拉长上下文,而是靠一套会压缩、会检索、会遗忘、会治理的外置记忆系统。一、先给结论:Agent 的记忆系统,本质是“上下文…...

基于ESP8266的可穿戴Wi-Fi设备:从硬件设计到ESPHome智能控制
1. 项目概述:一个可穿戴的Wi-Fi智能小玩意最近在捣鼓智能家居和可穿戴电子,总想把手边的小物件变得更“聪明”一点。于是,我设计并制作了一个基于ESP8266的可穿戴Wi-Fi设备。它的核心思路很简单:把一块功能强大的Wi-Fi微控制器&am…...

三分钟快速上手:FanControl让你的电脑风扇从此安静又高效
三分钟快速上手:FanControl让你的电脑风扇从此安静又高效 【免费下载链接】FanControl.Releases This is the release repository for Fan Control, a highly customizable fan controlling software for Windows. 项目地址: https://gitcode.com/GitHub_Trending…...
函数的计算原理(附绘图代码))
从复平面几何到Python代码:可视化理解NumPy中angle()函数的计算原理(附绘图代码)
从复平面几何到Python代码:可视化理解NumPy中angle()函数的计算原理(附绘图代码) 在数学和工程领域,复数不仅是抽象的概念,更是解决实际问题的有力工具。当我们谈论复数68j时,它不仅仅是一个符号组合——在…...