[linux驱动开发--环境搭建] qemu-9.1+linux-kernel-6.11
本文档模拟vexpress-a9开发板,作为铁头娃,要学就学最新的包
已经上传到github仓库
目录
- 编译qemu-9.1
- 编译linux-kernel-6.11
- 编译busybox-1.36.1
- NFS挂载
1. qemu-stable-9.1源码编译安装
1.1. 下载qemu源码的stable-9.1分支
仓库地址
mkdir qemu_9.1
cd qemu_9.1
git clone https://gitlab.com/qemu-project/qemu.git --branch=stable-9.1 --depth=5
git submodule update --init --recursive
cd qemu
1.2. 安装依赖
参考文档
sudo apt-get install git libglib2.0-dev libfdt-dev libpixman-1-dev zlib1g-dev ninja-build
sudo apt-get install git-email
sudo apt-get install libaio-dev libbluetooth-dev libcapstone-dev libbrlapi-dev libbz2-dev
sudo apt-get install libcap-ng-dev libcurl4-gnutls-dev libgtk-3-dev
sudo apt-get install libibverbs-dev libjpeg8-dev libncurses5-dev libnuma-dev
sudo apt-get install librbd-dev librdmacm-dev
sudo apt-get install libsasl2-dev libsdl2-dev libseccomp-dev libsnappy-dev libssh-dev
sudo apt-get install libvde-dev libvdeplug-dev libvte-2.91-dev libxen-dev liblzo2-dev
sudo apt-get install valgrind xfslibs-dev
sudo apt-get install libnfs-dev libiscsi-dev
文档中没有提及的依赖
sudo apt install python3-venv python3-pip tomli flex bison
1.3. 编译qemu,配置环境变量
如果这个过程还缺什么依赖,可以根据提醒自行安装,或者问AI
mkdir build
cd build
../configure
make qemu-system-arm -j12
echo 'export PATH="your_path/qemu_9.1/qemu/build:$PATH"' >> ~/.bashrc
source ~/.bashrc
2. linux kernel 6.11编译dtb和zImage
2.1. 下载kernel源码
仓库地址
cd ../../
git clone https://github.com/torvalds/linux.git --branch=v6.11 --depth=1
cd linux
2.2. 编译dtb和zImage
安装交叉编译工具链
sudo apt install gcc-arm-linux-gnueabihf
编译
export ARCH=arm
export CROSS_COMPILE=arm-linux-gnueabihf-
make imx_v6_v7_defconfig
make -j12
2.3. 测试启动内核
模拟在Freescale sabrelite开发板上运行,不需要uboot也可以,参考文档
这里没有指定根文件系统,所以卡在了kernel panic
qemu-system-arm -M sabrelite -smp 4 -m 1G \-display none -serial null -serial stdio \-kernel ./arch/arm/boot/zImage \-dtb ./arch/arm/boot/dts/nxp/imx/imx6q-sabrelite.dtb \-append "root=/dev/ram"
3. 编译最小根文件系统
3.1. 下载busybox1.36.1源码
下载链接,进入连接后往下滑找到最新的stabel版本就行如下图所示

回到qemu_9.1目录下下载busybox自行解压,文件结构如下
.
├── busybox
├── linux
├── qemu
└── u-boot-2024.10
3.2. 配置编译
cd busybox
export ARCH=arm CROSS_COMPILE=arm-linux-gnueabihf-
make menuconfig
# Busybox Settings —> Build Options —> [*] Build BusyBox as a static binary (no shared libs)
make -j12
3.3. 创建rootfs
不需要打包成rootfs.ext4,我们用NFS挂载
cd ..
mkdir img
cd img
mkdir rootfs
cd rootfs
mkdir proc sys dev etc tmp lib
cp -rf ../../busybox/_install/* ./
cp -rf /usr/arm-linux-gnueabihf/lib/* ./
4. NFS挂载
4.1. 文件汇总
把前面用到的kernel和.dtb文件复制到img文件夹中,此时qemu_9.1的文件结构如下
$ tree -L 1
.
├── busybox
├── img
├── linux
├── qemu
└── u-boot-2024.10
img文件内文件有如下所示
$ tree -L 1
.
├── rootfs
├── vexpress-v2p-ca9.dtb
└── zImage
4.2. 安装NFS
# 安装 NFS 服务器
sudo apt-get install nfs-kernel-server
sudo vim /etc/exports
# 在文件最后一行添加这行内容,记得把路径和IP地址改成你自己的
# ~/qemu_9.1/img/rootfs 192.168.3.0/24(rw,sync,no_subtree_check,no_root_squash,insecure)
sudo service nfs-kernel-server restart
4.3. 配置虚拟网卡
# 创建 tap 设备
sudo ip tuntap add dev tap0 mode tap
# 启用 tap 设备
sudo ip link set tap0 up
# 配置 IP 地址
sudo ip addr add 192.168.3.101/24 dev tap0
# 验证配置
ip addr show tap0
4.4. 编写Makefile,启动运行
# 进入img文件夹
touch Makefile
Makefile内容如下所示:记得把文件路径和IP地址改成你自己的
# 定义变量
DTB = ./vexpress-v2p-ca9.dtb
KERNEL = ./zImage
ROOTFS = ./rootfs
QEMU = qemu-system-arm# 默认目标
.PHONY: all
all: run# 运行 QEMU
.PHONY: run
run:$(QEMU) -cpu cortex-a9 -smp 4 -m 512 \-machine type=vexpress-a9 -serial mon:stdio \-kernel $(KERNEL) \-dtb $(DTB) \-netdev tap,id=net0,ifname=tap0,script=no,downscript=no \-device virtio-net-device,netdev=net0 \-append "root=/dev/nfs rw nfsroot=192.168.3.162:~/qemu_9.1/img/rootfs ip=192.168.3.106 console=ttyAMA0" \-nographic# 清理
.PHONY: clean
clean:@echo "Nothing to clean."maek run
5. 效果如下
已经上传到github仓库
芯片的参考手册可以到ARM官网下载,例如:ARM CoreTile Express A9×4 TRM

相关文章:
[linux驱动开发--环境搭建] qemu-9.1+linux-kernel-6.11
本文档模拟vexpress-a9开发板,作为铁头娃,要学就学最新的包 已经上传到github仓库 目录 编译qemu-9.1编译linux-kernel-6.11编译busybox-1.36.1NFS挂载 1. qemu-stable-9.1源码编译安装 1.1. 下载qemu源码的stable-9.1分支 仓库地址 mkdir qemu_9.…...

019集——获取CAD图中多个实体的包围盒(CAD—C#二次开发入门)
如下图所示,获取多个实体的最大包围盒,用红色线表示: 也可单独选圆的包围盒 部分代码如下: using Autodesk.AutoCAD.ApplicationServices; using Autodesk.AutoCAD.DatabaseServices; using Autodesk.AutoCAD.Geometry; using A…...
【Clickhouse 探秘】Clikchouse 有哪些表引擎?你都知道哪些?
👉博主介绍: 博主从事应用安全和大数据领域,有8年研发经验,5年面试官经验,Java技术专家,WEB架构师,阿里云专家博主,华为云云享专家,51CTO 专家博主 ⛪️ 个人社区&#x…...

你好,C++并发世界
C并发编程的主要目的是任务隔离和提高性能 是的,C并发编程的主要目的是任务隔离和提高性能。具体来说,可以总结为以下几点: 任务隔离:通过并发编程,程序可以将不同的任务或计算分隔开,这样可以防止它们之间…...

windows10 安装 达梦数据库DM8
一. 前期工作 下载 https://www.dameng.com/list_103.html 通过百度网盘分享的文件:达梦数据库 链接:https://pan.baidu.com/s/1mJcT3UiwojeWIhXpAwh-RA 提取码:jyzi 点我: 想要 解压 双击iso文件 二. 安装步骤 1 .双击setup.ext安装 …...
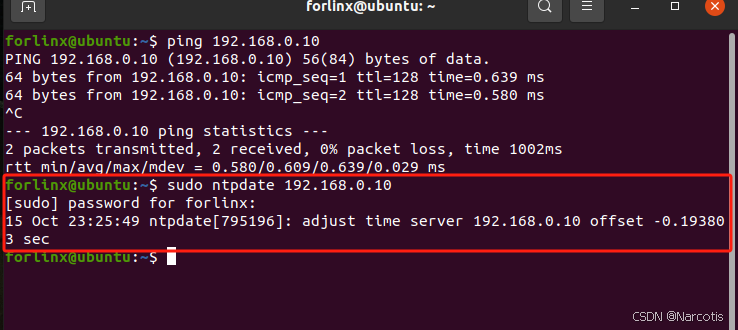
ntp交叉编译 ntpdate时间同步
NTP(Network Time Protocol,网络时间协议)是一种用于在计算机系统之间同步时钟的协议,广泛覆盖网络环境中,确保网络设备和计算机上的时间保持一致。NTP 是基于 UDP 协议工作在123号端口上,能够在不同的网络条件下达到数千级别的精度同步时间。 实现windows上位机作为ntp服…...
微服务实战系列之玩转Docker(十六)
导览 前言Q:基于容器云如何实现高可用的配置中心一、etcd入门1. 简介2. 特点 二、etcd实践1. 安装etcd镜像2. 创建etcd集群2.1 etcd-node12.2 etcd-node22.3 etcd-node3 3. 启动etcd集群 结语系列回顾 前言 Docker,一个宠儿,一个云原生领域的…...
Solana 代币 2022 — Transfer Hook
从零到英雄的 Solana 代币 2022 — Transfer Hook Token 2022 计划引入了几项令人兴奋的扩展,增强了铸造和代币账户的功能。在这些功能中,我个人最喜欢的是Transfer Hook (转账钩子) 。 想象时间 让我们戴上想象的帽子…...

网络爬虫中的反爬虫技术:突破限制,获取数据
,网络爬虫已成为获取大量网络数据的重要工具。然而,随着爬虫技术的发展,许多网站也开始采用各种反爬虫措施来保护自己的数据。作为爬虫开发者,我们需要不断更新我们的技术,以应对这些反爬虫措施。本文将详细介绍一些常…...

【ROS2】cv_bridge:ROS图像消息和OpenCV的cv::Mat格式转换库
1、简述 cv_bridge可以实现ROS图像消息(sensor_msgs::msg::Image)和OpenCV的cv::Mat格式的转换。 cv_bridge支持各种常见的图像编码格式,包括JPEG、PNG、BMP等。 2、互转 1)cv::Mat转sensor_msgs::Image cv::Mat image; sensor_msgs::ImagePtr pMsg = cv_bridge::CvIma…...

【Web.路由】——URL生成
前几篇文章介绍了路由的相关知识,包括原理,模板和约束。围绕的一个点就是URL,那么URL是如何生成的呢? 在 ASP.NET CORE应用程序中,使用了一个叫 LinkGenerator的链接生成器来生成URL的。 LinkGenerator是一个中间件组件…...

使用 Java 实现从搜索引擎批量下载图片
在进行一些数据收集、图像处理或研究工作时,我们可能需要从网络上批量下载高质量的图片。本文将介绍如何使用 Java 和 Jsoup 库,从搜索引擎中抓取图片,解析详情页并过滤出高质量图片。通过以下几个步骤,您可以自动化这个图片收集的…...

基于Matlab GUI的说话人识别测试平台
基于Matlab GUI的说话人识别测试平台 摘 要:为了克服在Matlab中语音处理工具箱的不足,设计出基于Matlab图形用户界面(GUI)的说话人识别测试平台。系统框架设计:特征参数采用美尔倒谱系数及差分美尔倒谱系数,…...

Leetcode 热题100之二叉树2
1.二叉树的层序遍历 思路分析:层序遍历是逐层从左到右访问二叉树的所有节点,通常可以使用广度优先搜索(BFS)来实现。我们可以使用一个队列(FIFO)来存储每一层的节点,并逐层访问。 初始化队列&a…...

<项目代码>YOLOv8 煤矸石识别<目标检测>
YOLOv8是一种单阶段(one-stage)检测算法,它将目标检测问题转化为一个回归问题,能够在一次前向传播过程中同时完成目标的分类和定位任务。相较于两阶段检测算法(如Faster R-CNN),YOLOv8具有更高的…...

GA/T1400视图库平台EasyCVR视频分析设备平台微信H5小程序:智能视频监控的新篇章
GA/T1400视图库平台EasyCVR是一款综合性的视频管理工具,它兼容Windows、Linux(包括CentOS和Ubuntu)以及国产操作系统。这个平台不仅能够接入多种协议,还能将不同格式的视频数据统一转换为标准化的视频流,通过无需插件的…...
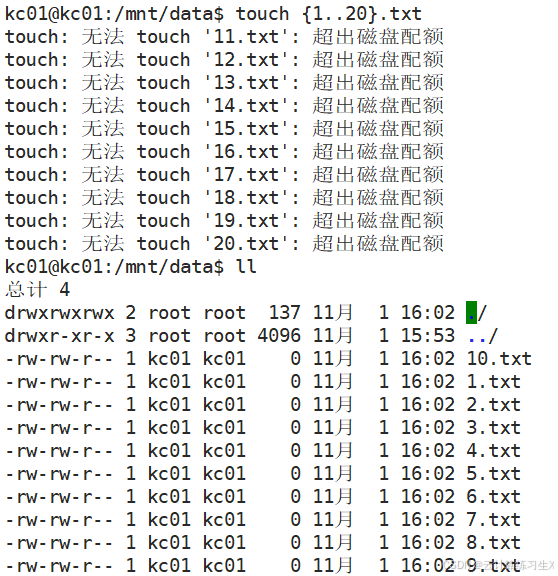
LVM与磁盘配额
文章目录 LVM与磁盘配额1 LVM概述1.1 名词解释1.2 LVM优势 2 LVM相关命令2.1 创建逻辑卷过程2.2 对逻辑卷扩容 3 磁盘配额3.1 磁盘配额的特点3.2 磁盘配额的命令3.3 查看配额使用情况3.4 验证磁盘配额3.5 实验 LVM与磁盘配额 1 LVM概述 1.1 名词解释 LVM:logical…...

xmuoj [蒙德里安的梦想] 状压dp个人笔记
本题是状压dp经典题目,很多人都是通过这一题开始对状压dp有所了解。 在进行讲解之前,我们先通过几个问答大致了解状压dp。 一、问答 1. 问题:什么是状压dp? 回答:状压dp即为状态压缩动态规划,何为状态压缩&#x…...

ubuntu22安装搜狗输入法不能输入中文
关闭Wayland 在/etc/gdm3/custom.conf文件内,取消注释WaylandEnable cat /etc/gdm3/custom.conf | grep WaylandEnable WaylandEnablefalse 其它步骤参考搜狗官方教程 https://pinyin.sogou.com/linux/help.php...

HtmlAgilityPack 操作详解
目录 1.安装 HtmlAgilityPack 2. 示例 HTML 3. 使用 HtmlAgilityPack 进行 HTML 解析与操作 4. 代码详解 1.加载html文档 2.选择元素 3. 提取属性 4.修改属性 5.常用的几种获取元素的 XPath 写法 HtmlAgilityPack: 轻量且高效,适合进行常规的 H…...

Flowable 6.7.2 适配达梦数据库踩坑实录:从驱动到Liquibase源码修改全攻略
Flowable 6.7.2 深度适配达梦数据库实战指南:从驱动配置到源码级改造 在国产化替代浪潮中,数据库迁移往往是技术团队面临的首要挑战。当工作流引擎Flowable遇上国产数据库达梦(DM),两者的"语言不通"会导致一系列兼容性问题。本文将…...

基于ENVI、eCognition与ArcGIS的南京江北新区土地利用变化监测与驱动分析
1. 南京江北新区土地利用变化监测的技术路线 我第一次接触南京江北新区土地利用监测项目时,被这个区域的快速发展震撼到了。作为国家级新区,这里从2015年设立至今,土地利用格局发生了翻天覆地的变化。要准确捕捉这些变化,我们采用…...

别再只会用pandas了!用openpyxl的load_workbook处理Excel,这些坑我帮你踩过了
别再只会用pandas了!用openpyxl的load_workbook处理Excel,这些坑我帮你踩过了 当Python开发者需要处理Excel文件时,pandas往往是首选工具——它简单、高效,能快速完成数据导入导出。但当你面对复杂格式的Excel文件,比…...

overwrite
编写overwrite.c程序#inlcude<stdio.h> int main() {int b 123;int c 789;int a 456;char s[100];printf("%p\n", &a);scanf("%s", s);printf(s);if (a 16){puts("my name is c");}else if (a 2){puts("my name is small&qu…...
)
HYCONTROL MICROFLEX-DB超声波液位计实操详解(参数+工况+故障排查)
在工业液位测量中,腐蚀性介质、罐内干扰、泡沫水汽、后期维护量大一直是现场普遍痛点,很多中小型储罐、水池、反应罐都会纠结性价比高、调试简单、稳定性强的超声波液位计。今天给大家详细拆解一款进口紧凑型液位变送器:英国HYCONTROL海康MIC…...

吕欣团队《大数据平台架构》第四章读书笔记:HDFS——把一块硬盘“拆”成一整个数据中心
最近在系统地补 Hadoop 的基础设施部分,第四章讲的是 HDFS(Hadoop Distributed File System)。这一章看下来最大的感受是:HDFS 本质上不是一个“文件系统增强版”,而是一种完全围绕“大规模数据处理”重新设计的存储哲…...
)
【独家首发】NotebookLM语义搜索底层架构图谱(基于2024 Q2最新API逆向分析,含7层向量映射逻辑)
更多请点击: https://intelliparadigm.com 第一章:NotebookLM语义搜索功能全景概览 核心能力定位 NotebookLM 的语义搜索并非传统关键词匹配,而是基于用户上传文档(PDF、TXT、Google Docs)构建的私有知识图谱进行上下…...

Codex 怎么详细科学地先出计划
本文聚焦一个非常关键的使用能力:让 Codex 在执行之前先出计划。很多人一上来就让 Codex 改代码、修 bug、做联动,结果不是方向偏了,就是改动过大、验证困难。先出计划的价值,不是多一个步骤,而是让复杂任务先被看清楚…...
)
别再为RS485上下拉头疼了!手把手教你搞定RK3568开发板上的ttyS7口(附Qt调试工具源码)
RK3568开发板RS485接口调试实战:从硬件配置到Qt工具开发全解析 在嵌入式系统开发中,RS485通信接口因其抗干扰能力强、传输距离远等优势,被广泛应用于工业自动化、智能家居等领域。然而,许多开发者在RK3568平台上调试RS485接口时&a…...

别再只调API了!深入XXL-Job时间轮源码,手把手带你搞懂任务触发与调度过期的那些坑
深入XXL-Job时间轮:从源码解析任务调度与过期处理的实战指南 在分布式任务调度领域,XXL-Job以其轻量级、易扩展的特性成为众多Java项目的首选方案。但当我们从简单的API调用者转变为架构设计者时,仅满足于配置层面的理解显然不够。本文将带您…...