数据库三范式(1NF、2NF、3NF)
1NF(第一范式)
定义:确保每一列都是原子值,即是不可分割的基础数据项。
所谓第一范式(1NF)是指在关系模型中,对于添加列的一个规范要求,所有的列都
应该是原子性的,即数据库表的每一列都是不可分割的原子数据项,而不能是集合,
数组,记录等非原子数据项。即实体中的某个属性有多个值时,必须拆分为不同的属
性。在符合第一范式(1NF)表中的每个域值只能是实体的一个属性或一个属性的一
部分。简而言之,第一范式就是无重复的域。
比如地址,我们可以存为辽宁省大连市甘井子区。那么这样其实就不满足,因为我们
把省市区放在一起存储了。我们将地址进行拆分存储即可。省,市,区。这样满足
第一范式。
2NF(第二范式)
定义:在满足1NF的基础上,消除非主键字段对主键字段的部分(函数)依赖。
部分函数依赖是指在一个关系表中,非主属性(即非主键字段)依赖于主键的一部分,而不是整个主键。在第二范式(2NF)中,要求非主属性必须完全依赖于主键,这意味着非主属性不能只依赖于主键的一部分。
第二范式需要确保数据库表中的每一列都和主键相关,而不能只与主键的某一部分相关(主要针对联合主键而言)。
部分函数依赖的例子:
假设Student表的结构如下:
| 学生编号 | 学生姓名 | 班级编号 | 院系 | 课程编号 | 成绩 |
|---|---|---|---|---|---|
| S01 | 杨明 | D01 | 思齐 | C01 | 90 |
| S02 | 李婉 | D01 | 思齐 | C01 | 87 |
| S01 | 杨明 | D01 | 思齐 | C02 | 92 |
| S03 | 刘海 | D02 | 述圣 | C01 | 95 |
| S04 | 安然 | D02 | 述圣 | C02 | 78 |
| S05 | 乐天 | D03 | 省身 | C01 | 82 |
复合主键是指由多个字段组合起来,共同作为表的主键,这些字段的组合值必须是唯一的,用来唯一标识表中的每条记录。
学生编号是作为识别学生的唯一标识,我们可以假设它是主键。但是,如果我们考虑到成绩是针对每个学生编号和课程编号组合的,那么在这个特定场景下,学生编号和课程编号一起构成了复合主键,因为只有这两个字段的组合才能唯一确定一条记录。
部分函数依赖的情况是指在一个复合主键的情况下,非主属性依赖于主键的一部分。例如,如果学生姓名、班级编号和院系只依赖于学生编号而不依赖于课程编号,那么这些非主属性就对复合主键(学生编号,课程编号)存在部分函数依赖。
为了消除这种部分函数依赖,我们可以将表拆分成两个:
- 学生基本信息表(只包含学生编号、学生姓名、班级编号和院系):
| 学生编号 | 学生姓名 | 班级编号 | 院系 |
|---|---|---|---|
| S01 | 杨明 | D01 | 思齐 |
| S02 | 李婉 | D01 | 思齐 |
| S03 | 刘海 | D02 | 述圣 |
| S04 | 安然 | D02 | 述圣 |
| S05 | 乐天 | D03 | 省身 |
- 学生成绩表(包含学生编号、课程编号和成绩):
| 学生编号 | 课程编号 | 成绩 |
|---|---|---|
| S01 | C01 | 90 |
| S02 | C01 | 87 |
| S01 | C02 | 92 |
| S03 | C01 | 95 |
| S04 | C02 | 78 |
| S05 | C01 | 82 |
这样,每个表的非主属性都完全依赖于其主键,满足了第二范式(2NF)。
3NF(第三范式)
定义:在满足2NF的基础上,消除非主键字段对主键的传递依赖。
第三范式(3NF):第三范式需要确保数据表中的每一列数据都和主键直接相关,而不能间接相关。
在2NF基础上,任何非主属性不依赖于其它非主属性(在2NF基础上消除传递依赖)
举例说明:

上表中,所有属性都完全依赖于学号,所以满足第二范式,但是“班主任性别”和“班主任年龄”直接依赖的是“班主任姓名”,
而不是主键“学号”,所以需做如下调整:


这样以来,就满足了第三范式的要求。
不过现在业务上的表设计基本都是反范式的。当然不是说完全不遵守范式,而是适当的进行调整。
比如业务上经常需要余字段,减少联表查询,提升性能,特别是业务量比较大的公司,这种冗余是很有必要的!
相关文章:
数据库三范式(1NF、2NF、3NF)
1NF(第一范式) 定义:确保每一列都是原子值,即是不可分割的基础数据项。 所谓第一范式(1NF)是指在关系模型中,对于添加列的一个规范要求,所有的列都 应该是原子性的,即数…...
C语言_数据结构_顺序表
1. 本章重点 顺序表初始化顺序表尾插顺序表尾删顺序表头插顺序表头删顺序表查找顺序表在pos位置插入x顺序表删除pos位置的值顺序表销毁顺序表打印 2. 顺序表的概念及结构 顺序表是用一段物理地址连续的存储单元依次存储数据元素的线性结构,一般情况下采用数组存储…...
Llama 3.2 Vision Molmo:多模态开源生态系统基础
编者按: 视觉功能的融入对模型能力和推理方式的影响如何?当我们需要一个既能看懂图像、又能生成文本的 AI 助手时,是否只能依赖于 GPT-4V 这样的闭源解决方案? 我们今天为大家分享的这篇文章,作者的核心观点是…...
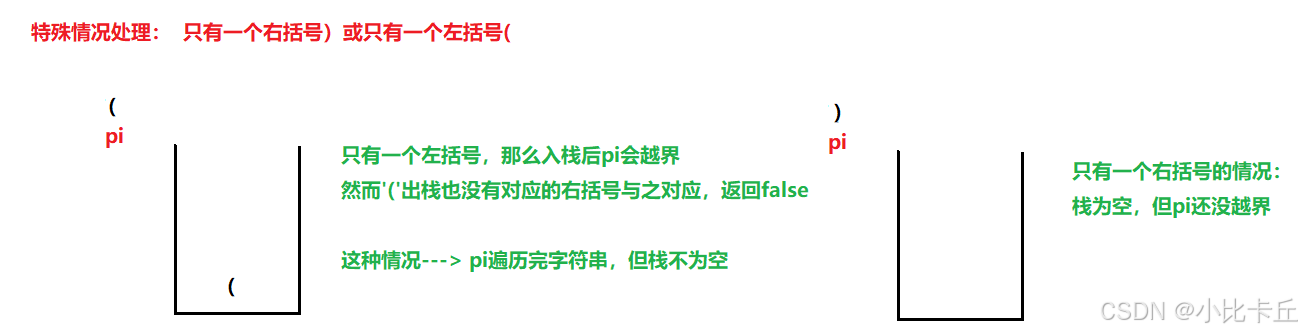
【数据结构与算法】第6课—数据结构之栈
文章目录 1. 栈2. 栈的初始化和栈的销毁3. 入栈和出栈(压栈)4. 取栈顶元素并打印5. 栈的练习题5.1 有效的括号 1. 栈 栈:也是一种线性表,其数据结构与动态顺序表的数据结构类似栈分为栈顶和栈底,在栈中,插入…...

开源全站第一个Nextron(NextJS+electron)项目--NextTalk:一款集成chatgpt的实时聊天工具
NextTalk 简介 该项目是一个基于Nextron(NextJSElectron)的桌面端实时聊天工具。 但由于使用了NextJS中的ssr及api route功能,该程序只能在开发环境运行。 关于生产版本:我将其网页端部分分离,并用Pake将其打包成桌面端,生产体…...

多样化的编程模型:并发与并行策略
因为经常看着某些框架设计的编程模型很晕,所以自己梳理总结了一下编程模型的分类,总共六个大类,基本所有常见框架设计的编程模型都是基于这六个大类来实现的,如果有错误的地方,请见谅并不吝赐教,感谢&#…...

npm入门教程2:npm历史
一、起源与诞生 时间背景:npm的诞生与Node.js的兴起紧密相关。Node.js是一个基于Chrome V8引擎的JavaScript运行环境,它允许JavaScript代码在服务器端运行。随着Node.js的流行,开发者们对于包管理和依赖解决的需求日益增长。诞生:…...
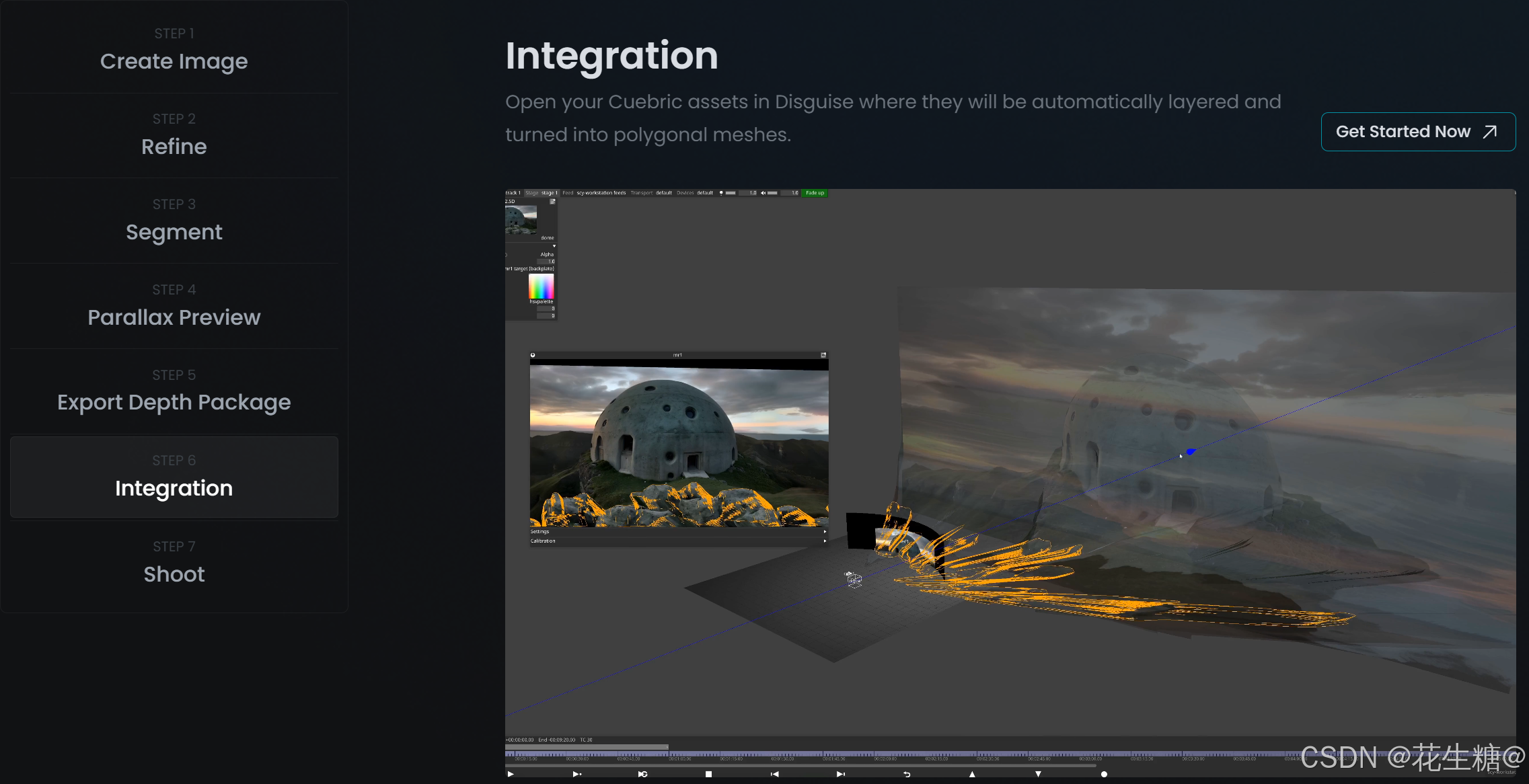
Cuebric:用AI重新定义3D创作的未来
一、简介 Cuebric 是一家成立于2022年夏天的好莱坞创新公司,致力于为电影、电视、游戏和时尚等行业提供先进的AI多模态SaaS平台。自2024年1月正式推出以来,Cuebric 已经在市场上获得了广泛的认可和积极的反馈。目前,该平台正处于1.0版本的beta测试阶段,已募集约50万美元的…...
)
前端react常见面试题目(basic)
1. 如果 React 组件的属性没有传值,它的默认值是什么? 如果一个 React 组件的属性(props)没有传值,那么它的默认值会是 undefined。你可以通过组件内部的逻辑来设置默认值,比如使用逻辑运算符或者 ES6 的默认参数。 …...

机器人技术基础(4章逆运动解算和雅克比矩阵)
逆运动解算: 雅克比矩阵: 将动力学分析转向运动的物体 下图中的 n o y 反映了机器人的姿态矩阵, 最后一列 p 反应了机器人在空间中的位置:...
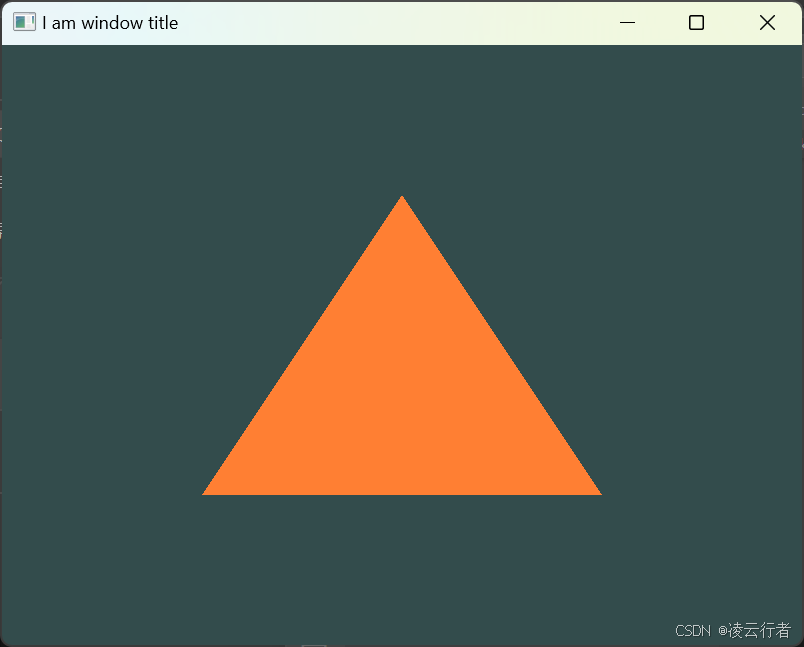
OpenGL入门002——顶点着色器和片段着色器
文章目录 一些概念坐标转换阶段顶点着色器片段着色器VBOVAO 实战简介main.cppCMakeLists.txt最终效果 一些概念 坐标转换阶段 概述: 模型空间、世界空间、视图空间和裁剪空间是对象在3D场景中经历的不同坐标变换阶段。每个空间对应渲染管道的一个步骤,…...

[数组排序] LCR 164. 破解闯关密码
文章目录 1. 题目链接2. 题目大意3. 示例4. 解题思路5. 参考代码 1. 题目链接 LCR 164. 破解闯关密码 - 力扣(LeetCode) 2. 题目大意 描述:给定一个非负整数数组 nums。 要求:将数组中的数字拼接起来排成一个数,打印…...
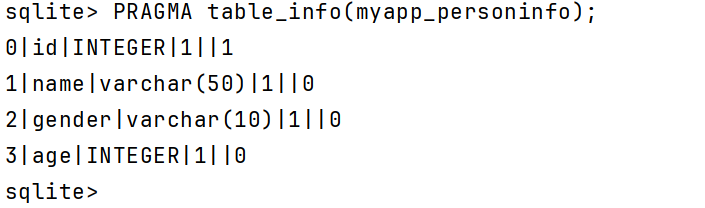
05 Django 框架模型介绍(一)
文章目录 1、Django 模型简介2、Django 中创建并使用模型(1)新加一个名为 myapp 的应用(2)定义模型类(2)激活模型类(3)创建数据库迁移文件(4)应用迁移文件 3、…...
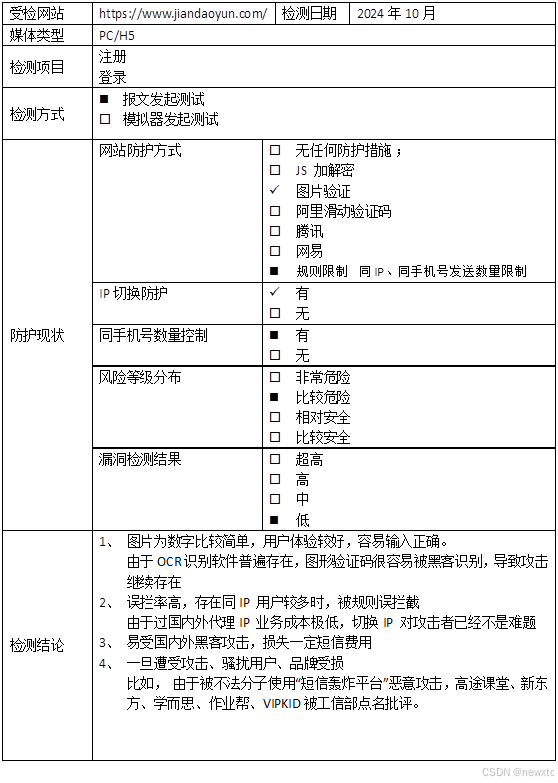
【简道云 -注册/登录安全分析报告】
前言 由于网站注册入口容易被黑客攻击,存在如下安全问题: 暴力破解密码,造成用户信息泄露短信盗刷的安全问题,影响业务及导致用户投诉带来经济损失,尤其是后付费客户,风险巨大,造成亏损无底洞…...

【C++题解】1970. 判断是什么字符
欢迎关注本专栏《C从零基础到信奥赛入门级(CSP-J)》 问题:1970. 判断是什么字符 类型:字符串、字符型 题目描述: 从键盘读入一个字符,有可能是大写字母、小写字母、数字中的一种,请编程判断&…...

Python自动化操作Word文档详解
在日常办公和数据处理中,我们经常需要处理Word文档。手动操作Word文档可能会非常繁琐和耗时,而使用Python可以实现自动化操作,提高工作效率。本文将详细介绍如何使用Python自动化操作Word文档,包括读取、写入、修改和格式化等操作…...
-中位值滤波法)
常用滤波算法(二)-中位值滤波法
文章目录 一、中位值滤波法简介二、C语言实现中位值滤波法三、程序说明信号初始化:滤波窗口大小:内存分配:中位值滤波函数:中位值计算函数:内存释放: 四、总结 中位值滤波法,作为一种非线性滤波…...

HCIP--以太网交换安全(总实验)
实验背景 假如你是公司的网络管理员,为了提高公司网络安全性,你决定在接入交换机部署一些安全技术:端口隔、端口安全、DHCP snooping、IPSG。 实验拓扑图 实验的要求: 1.在R1、R2连接在GE0/0/1和GE0/0/2接口下,均划…...

C语言 | Leetcode C语言题解之第519题随机翻转矩阵
题目: 题解: typedef struct {unsigned long long val;UT_hash_handle hh; } Hash;typedef struct {Hash *hash;int n_rows;int n_cols; } Solution, SL;Solution* solutionCreate(int n_rows, int n_cols) {SL *obj malloc(sizeof(SL));obj->hash …...
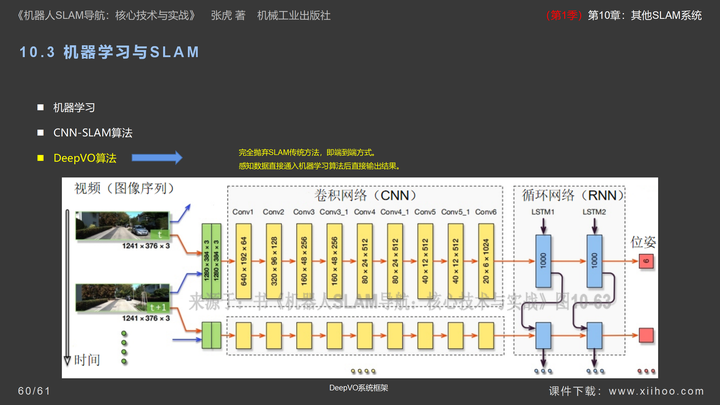
《机器人SLAM导航核心技术与实战》第1季:第10章_其他SLAM系统
视频讲解 【第1季】10.第10章_其他SLAM系统-视频讲解 【第1季】10.1.第10章_其他SLAM系统_RTABMAP算法-视频讲解 【第1季】10.2.第10章_其他SLAM系统_VINS算法-视频讲解 【第1季】10.3.第10章_其他SLAM系统_机器学习与SLAM-视频讲解 第1季:第10章_其他SLAM系统 …...

从Scratch图形化到Python代码:用树莓派给LeArm机械臂做二次开发实战
从Scratch图形化到Python代码:用树莓派给LeArm机械臂做二次开发实战 当Scratch积木块拼接的机械臂动作开始显得单调时,便是时候揭开底层控制的神秘面纱了。本文将带您跨越图形化编程的舒适区,用树莓派的Python环境重新定义LeArm机械臂的智能—…...

基于Adafruit FLORA的红外遥控胸针DIY:从嵌入式编程到可穿戴艺术
1. 项目概述:一个藏在时尚配饰里的“电视终结者”几年前,我在一个朋友聚会上,发现大家明明在聊天,眼睛却总是不自觉地瞟向角落里那个正在播放无聊广告的电视。直接走过去关掉显得有点突兀,找遥控器又太麻烦。那一刻我就…...

迪拜塔幕墙设计
迪拜塔幕墙设计 【作 者】:罗永增 【关键词】:迪拜塔,幕墙,设计,系统。 前言:...

Python与ChatGPT构建智能办公自动化:从任务分解到智能体系统
1. 项目概述:用Python与ChatGPT联手,让办公自动化“开口说话”如果你每天还在重复着打开Excel、复制粘贴数据、手动写邮件、整理报告这些枯燥的活儿,那这个项目可能就是你的“数字员工”入职通知书。Sven-Bo/automate-office-tasks-using-cha…...

dotai:将AI大模型无缝集成到Shell终端的智能助手工具
1. 项目概述:当AI遇上你的终端如果你是一个重度命令行用户,每天在终端里敲击着ls、cd、git commit这些命令,有没有那么一瞬间,希望有个助手能帮你自动补全、解释命令,甚至直接帮你写出复杂的管道操作?dotai…...

构建个人知识库:从碎片化代码到结构化知识体系
1. 项目概述:从“ClawCode”看个人知识库的构建与价值最近在和一些开发者朋友交流时,发现一个普遍现象:大家电脑里都散落着无数代码片段、配置脚本、临时笔记和项目心得。这些“数字碎片”价值巨大,但往往因为缺乏有效的组织&…...

Deep Lake:AI数据湖实战指南,解决深度学习数据管理难题
1. 项目概述:当数据湖遇上深度学习如果你在深度学习项目里被数据管理搞得焦头烂额过,那你肯定懂我在说什么。模型训练到一半,发现数据版本不对,或者想对海量图像、视频做快速查询和采样,结果被IO速度卡得死死的。传统的…...

数据中心碳足迹与可靠性优化框架解析
1. 数据中心碳足迹与可靠性优化的挑战 现代数据中心已成为数字经济的动力引擎,但伴随算力需求的爆炸式增长,其能源消耗与碳排放问题日益凸显。根据最新统计,全球数据中心年耗电量已达4600亿度,占全球总用电量的2%。随着大语言模型…...
)
Tea印相失效诊断清单:从--v 6.2到--v 6.6,6个版本兼容性断点及降级回滚方案(含JSON config快照备份包)
更多请点击: https://intelliparadigm.com 第一章:Tea印相失效诊断清单:从--v 6.2到--v 6.6,6个版本兼容性断点及降级回滚方案(含JSON config快照备份包) Tea印相(TeaYinXiang)在 v…...

EL电致发光线与3D打印技术打造可穿戴发光骨架服
1. 项目概述:当发光骨架“活”过来每年万圣节,看着满大街的“幽灵”和“僵尸”,我总想搞点不一样的。直到去年,我决定不再满足于商店里千篇一律的服装,而是想自己动手,做一件真正能“发光”的、有科技感的骨…...