用于低成本接收机的LoRa SF11 500KHz波形检测解调算法
前一篇里,获取了LORAwan的物理层波形,并通过Octave查看了它的瞬时频率。LoRa是私有协议,网上已经有了很不错的开源的实现,如:
S2_LoRa通信实验
LoRaPhy
以及GNU-Radio的Lora模块、LimeSDR的Lora实现。当我试图修改上述代码实现上一篇文章里获取的波形的还原时,却无法得到正确的结果,也找不到原因。为了知其所以然,还是准备从头动手实现。由于是业余学习,不打算解决所有LORA协议的接收处理问题,只就事论事,只做默认出厂配置SF-11 500K一类。
接收机是国产B205-mini或者B-210,开发环境是开源的计算工具 GNU-Octave 。本文代码参考:
a4_lora/octave
文章目录
- 0 .实验学习结论摘要
- 1. 波形样本来源
- 2. 粗略显示LoRa物理层突发的结构
- 2.1 chirp的数学描述
- 2.2 chirp的归一化离散形式
- 3. 在频差条件下检测头部
- 3.1 钟差频差对头部检测几乎没有影响
- 3.2 检测结果
- 4. 基于相关峰起伏周期的钟差估计算法
- 4.1 低成本接收机的困境
- 4.2 相关峰起伏周期的成因
- 4.3 计算结果
- 5 基于 up-down chirp 边缘峰值交汇的时频差精确估计算法
- 5.1 笨办法观察规律
- 5.2 基于边缘最大值直线交点快速交汇的时频差估计
- 6 卡住位置补偿解调
- 7 拉远距离(加白噪声)测试
- 8 代码获取和运行
0 .实验学习结论摘要
虽然是站在LoRa-PHY、GNU-Radio巨人的肩膀上,但是在近1个月的不断踩坑、尝试中,还是非常的不顺利。最终得到正确结果时,感觉就像攀过了一座陡峭的小山。
- 我们发现对于Lora这种使用Chirp的起始频率携带信息的低成本硬件,其固有的时钟差、频率差对结果影响极大。尤其是使用另一个不靠谱的硬件来接收(比如我的山寨 B205mini),两者的钟差是不靠谱+不靠谱=离谱。能在Low SNR下解析出正确的数据,需要对波形的深刻理解和认识,每一个步骤都值得思考。
- 对我学习的清华大学项目 LoRa-PHY里,用于同步时钟误差的方法,是假设主要的误差都来自LoRa设备,用频差去折算钟差(时差)。在本实验里,我们的接收设备也很不靠谱,使得这个举措变得不稳定。我们通过观察相关峰值的最大值的周期变化,发现了隐含在头部14组up-chirp里的低频周期,提出了基于相关峰起伏周期的钟差估计算法,并使用它对钟差进行补偿,效果很好。
- 对收发时钟、频率稳定度都很低的情形,常见的二维时频相关算法耗时太大。提出基于 up-down chirp 边缘峰值交汇的时频差精确估计算法,只在窗口的边缘检测峰值,并两两连线,计算交汇坐标。
本人已经退休,不需要发Paper。谁如果论文里想引用这些idea,只要标明参考出处即可。
1. 波形样本来源
样本来源就是上一节使用山寨B205mini/B210采集的IQ路数据。由于靠的很近,几乎没有噪声。采样率是1MHz,双字节 int16。LoRa的设备的带宽是500KHz,SR=11。
波形样本已经跟随代码,一起放在Git服务器上。
2. 粗略显示LoRa物理层突发的结构
对于无噪声的波形,可以采用相位差分的方式,直接观察瞬时频率。读取一个突发数据,
并利用复数求取角度差分,就是相位差,也就是瞬时频率。
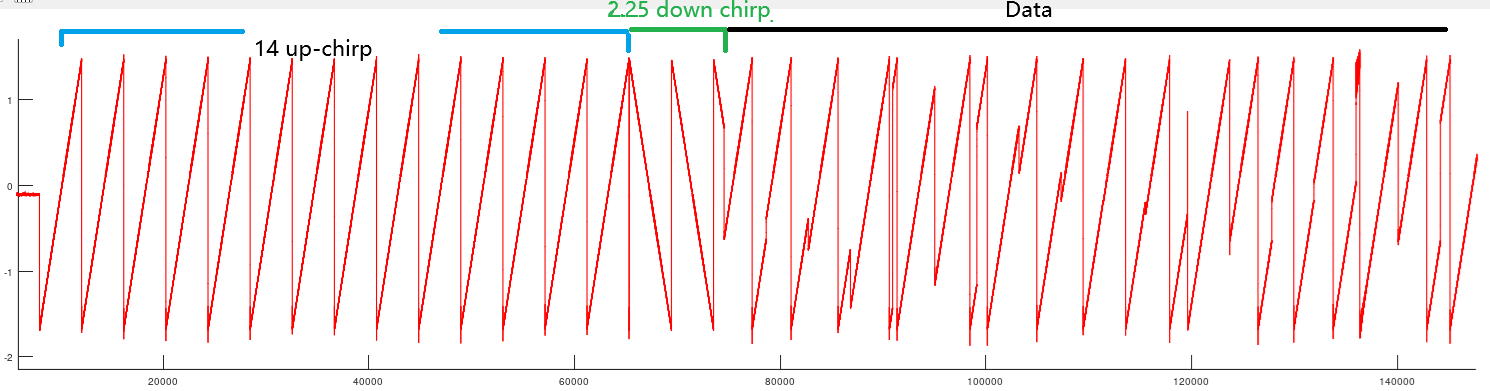
上图表明,我们购买的Lora模块默认开启了14个首部up-chirp,2.25个down-chirp
%%%%%%%%%%%%%%%读取一个2倍速率采集的无噪声文件。
%% USRP B210 430MHz, 16bit IQ BW500KHz
%fid = fopen('d:/lora/test.wav',"rb");
fid = fopen('data/iq_sf11_500KHz_spr1MHz.wav',"rb");
raw_iq_1d = fread(fid,'int16')';
fclose(fid);
%%组合复波形
raw_iq = raw_iq_1d(1:2:end)+1j*raw_iq_1d(2:2:end);
%幅度归一化
max_amp = sum(abs(raw_iq))/length(raw_iq);
raw_iq = raw_iq/max_amp;figure(1);
hold on
draw_freqs = zeros(1,length(raw_iq));
draw_freqs(2:end) = angle(raw_iq(2:end)) - angle(raw_iq(1:end-1));
draw_freqs(draw_freqs<=-pi ) = draw_freqs(draw_freqs<=-pi ) + 2*pi ;
draw_freqs(draw_freqs>=pi ) = draw_freqs(draw_freqs>=pi ) - 2*pi ;
plot(draw_freqs,'r');
2.1 chirp的数学描述
根据LoRa的定义,一个chirp 跨域的带宽是 B Hz,持续的时间是 T 秒,他们满足:
B T = 2 S F B T = 2^{SF} BT=2SF
在T秒内,基带IQ向量旋转的频率从 -B/2 变化到 B/2。
由于频率
f ( t ) = 2 π ( f 0 + B T t ) f(t)=2\pi(f_0+ \frac{B}{T}t ) f(t)=2π(f0+TBt)
而向量的相位是频率的积分,计算:
p ( t ) = ∫ f ( t ) d t = 2 π ( f 0 + B 2 T t ) t , t ⊂ [ 0 , T ) p(t)=\int f(t)dt=2\pi(f_0+ \frac{B}{2T}t )t, t\subset [0,T) p(t)=∫f(t)dt=2π(f0+2TBt)t,t⊂[0,T)
此时,样点的复平面向量可以表示为:
s ( t ) = e 2 π j ( f 0 + B 2 T t ) t s(t)=e^{2\pi j(f_0+ \frac{B}{2T}t )t} s(t)=e2πj(f0+2TBt)t
这个t的取值是 0 ~ T秒。
2.2 chirp的归一化离散形式
使用上述模拟波形的样式来计算chirp, 不容易出错。但如果换算为离散形式,则更方便写程序。假设我们采用高于LoRa带宽B的K倍速率采样,即 Sr = BK,样点为 n,则参考本文开头的第一个式子里SF、B、T的关系,一个chirp的样点数为:
S Y M = N ( S F , K ) = 2 S F B S r = 2 S F ⋅ K SYM=N(SF,K)=\frac {2^{SF}}{B} Sr=2^{SF}\cdot K SYM=N(SF,K)=B2SFSr=2SF⋅K
比如SF=11, K=2时,N就是4096点。根据离散、连续的关系,
t = n S r = n B K t=\frac{n}{Sr}=\frac{n}{BK} t=Srn=BKn
p ( t ) = 2 π ( f 0 + B 2 T n B K ) n B K = 2 π ( f 0 + n 2 T ⋅ K ) n B K p(t)=2\pi (f_0+ \frac{B}{2T}\frac{n}{BK})\frac{n}{BK}=2\pi (f_0+ \frac{n}{2T\cdot K})\frac{n}{BK} p(t)=2π(f0+2TBBKn)BKn=2π(f0+2T⋅Kn)BKn
由于 B T = 2 S F BT=2^{SF} BT=2SF, 有:
p ( t ) = 2 π ( f 0 B + n 2 ⋅ 2 S F ⋅ K ) n K p(t)=2\pi (\frac{f_0}{B}+ \frac{n}{2\cdot2^{SF}\cdot K})\frac{n}{K} p(t)=2π(Bf0+2⋅2SF⋅Kn)Kn
剩下一个 f0/B,也可以兑换为比例,其实f0取-B/2时,他就是 -1/2。
经过上面的推导,我们把 chirp 表示为和具体采样率、频率无关的值,只和SF,K有关。
p u p − c h i r p ( t ) = 2 π ( − 1 2 + n 2 ⋅ 2 S F ⋅ K ) n K p_{up-chirp}(t)=2\pi (-\frac{1}{2}+ \frac{n}{2\cdot2^{SF}\cdot K})\frac{n}{K} pup−chirp(t)=2π(−21+2⋅2SF⋅Kn)Kn
S u p − c h i r p ( n ) = e 2 π j ( − 1 2 + n 2 ⋅ 2 S F ⋅ K ) n K S_{up-chirp}(n)=e^{2\pi j (-\frac{1}{2}+ \frac{n}{2\cdot2^{SF}\cdot K})\frac{n}{K}} Sup−chirp(n)=e2πj(−21+2⋅2SF⋅Kn)Kn
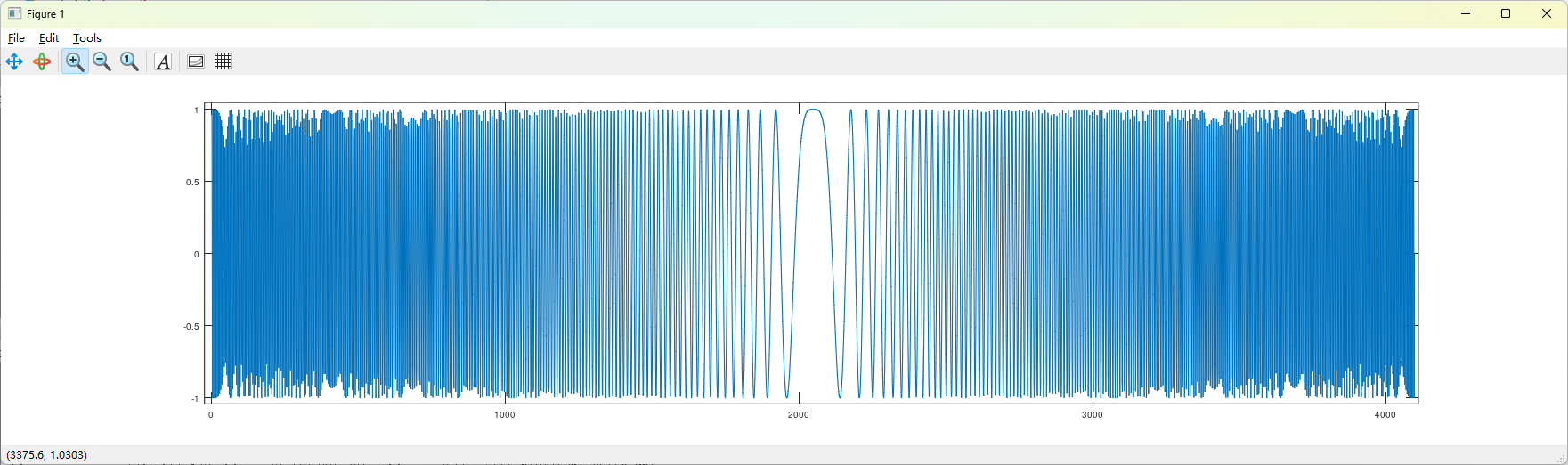
我们可以使用Octave生成这样的chirp:
chirp_n =0:1:SYM-1;
chirp_up = exp(2j*pi*(-1/2+chirp_n/2./(2^SF)./K).*chirp_n./K);
plot(real(chirp_up));
3. 在频差条件下检测头部
使用与上面的 chirp 对应的相关滤波器,即可从噪声中检测头部的存在。也可以利用down-chirp 相乘后,fft查看有无单音来检测,那样速度更快。
检测这个步骤,使用共轭,能够和原始波形直接合成为很强的峰。
S u p − c h i r p ‾ ( n ) = e − 2 π j ( − 1 2 + n 2 ⋅ 2 S F ⋅ K ) n K \overline{S_{up-chirp}}(n)=e^{-2\pi j (-\frac{1}{2}+ \frac{n}{2\cdot2^{SF}\cdot K})\frac{n}{K}} Sup−chirp(n)=e−2πj(−21+2⋅2SF⋅Kn)Kn
这个波形的瞬时频率为:
f u p − c h i r p ‾ ( n ) = − 2 π ( − 1 2 + n 2 S F ⋅ K ) 1 K \overline{f_{up-chirp}}(n)=-{2\pi (-\frac{1}{2}+ \frac{n}{2^{SF}\cdot K})\frac{1}{K}} fup−chirp(n)=−2π(−21+2SF⋅Kn)K1
我们在第一阶段,主要的工作就是用上面这个相关波形去和原始波形做相关,两两相乘而后求和,检测峰值。
3.1 钟差频差对头部检测几乎没有影响
即使在有频偏的情况下,这种检测依然是有效的。只要频率偏移不是很离谱,通过样点的移动,总能用时间延迟的损失来抵消频偏:
设存在一个时间偏移 n ′ = δ + n n'=\delta+n n′=δ+n, 以及一个固有的频率偏移 Δ \Delta Δ:
f u p − c h i r p ‾ ( n ′ ) = f u p − c h i r p ‾ ( δ + n ) = − 2 π j ( Δ − 1 2 + n + δ 2 ⋅ 2 S F ⋅ K ) 1 K \overline{f_{up-chirp}}(n')=\overline{f_{up-chirp}}(\delta+n)=-{2\pi j (\Delta-\frac{1}{2}+ \frac{n+\delta}{2\cdot2^{SF}\cdot K})\frac{1}{K}} fup−chirp(n′)=fup−chirp(δ+n)=−2πj(Δ−21+2⋅2SF⋅Kn+δ)K1
当这个 δ \delta δ满足下式,使得频偏 Δ \Delta Δ其恰好能被时间推移抵消:
Δ + δ 2 ⋅ 2 S F ⋅ K = 0 \Delta+\frac{\delta}{2\cdot2^{SF}\cdot K}=0 Δ+2⋅2SF⋅Kδ=0
则结果变为
f u p − c h i r p ‾ ( n ′ ) = − 2 π ( − 1 2 + n ′ − δ 2 ⋅ 2 S F ⋅ K ) 1 K \overline{f_{up-chirp}}(n')=-{2\pi (-\frac{1}{2}+ \frac{n'-\delta}{2\cdot2^{SF}\cdot K})\frac{1}{K}} fup−chirp(n′)=−2π(−21+2⋅2SF⋅Kn′−δ)K1
相关峰与无频偏时相比,只是提前或者推迟了 δ \delta δ个样点,幅度稍微有些降低而已(可用的重叠频段不再是B Hz了)。
3.2 检测结果
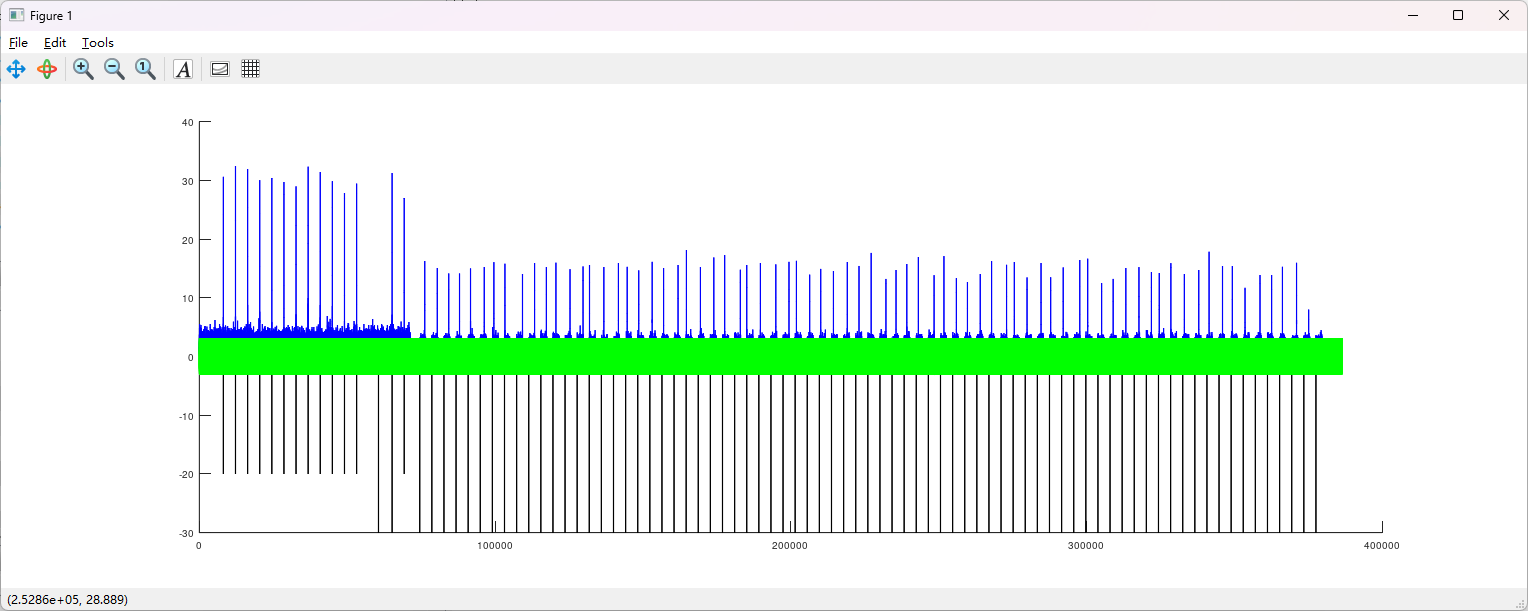
我们的头部检测结果如下:
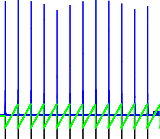
绿色的是瞬时频率,蓝色的是相关峰,黑色的是峰值标记位置。请格外注意这些蓝色峰值的起伏,它很重要!
4. 基于相关峰起伏周期的钟差估计算法
在第3节,我们发现即使不去补偿时频差,也能顺利检测到头部。但是,LoRa靠频率的绝对起点f0来表示符号, 解扩、解调不做钟差、频差,就得不到正确的结果。
4.1 低成本接收机的困境
学习资源 LoRa-PHY里,认为钟差基本源自LoRa设备本身。这或许因为大学实力雄厚,采集设备的时钟稳定而标准。此时,可以沿用LoRa-PHY的算法,使用频差/射频频率来兑换钟差。
然而,我们的接收机成本很低,本身的频差、钟差就很大,和LoRa这种60多元的板子旗鼓相当。此时,上述算法就不行了。LoRa-PHY抵消后存在一个微弱的残差,使得在发送64字节数据时,符号依旧会漂移3-4次。
4.2 相关峰起伏周期的成因
注意看,3.2节的头部检测相关峰,每个峰值的幅度并不一致! 讲起来,按照Lora的标准定义,采用K倍速率采样,不会有起伏。即使具有频偏,相关位置的相位也是定值,每次相关的幅度衰减是恒定的。为啥周期起伏?还是个COS函数的样子?那是因为时钟存在误差,每次对齐的相位会发生漂移。
这个小细节蕴含着非常重要的一个参数,正是LoRa设备的时钟和我们的接收机时钟之间的误差。这个误差,使得原本应该 N 点1个符号的chirp,接收到后可能变成 N+0.12点,如果不去补偿这个误差,以N为周期去卡符号,就会慢慢错位。错位后,每次相关时,相位初始值发生缓慢平移,造成峰值周期性的起伏。
提取这个误差,非常简单,对这十几个点,做FFT,如对 14个点做1048576点的FFT,并求取峰值,峰值与窗口的比例偏移就是时钟偏移。我们把上图的顶部放大:
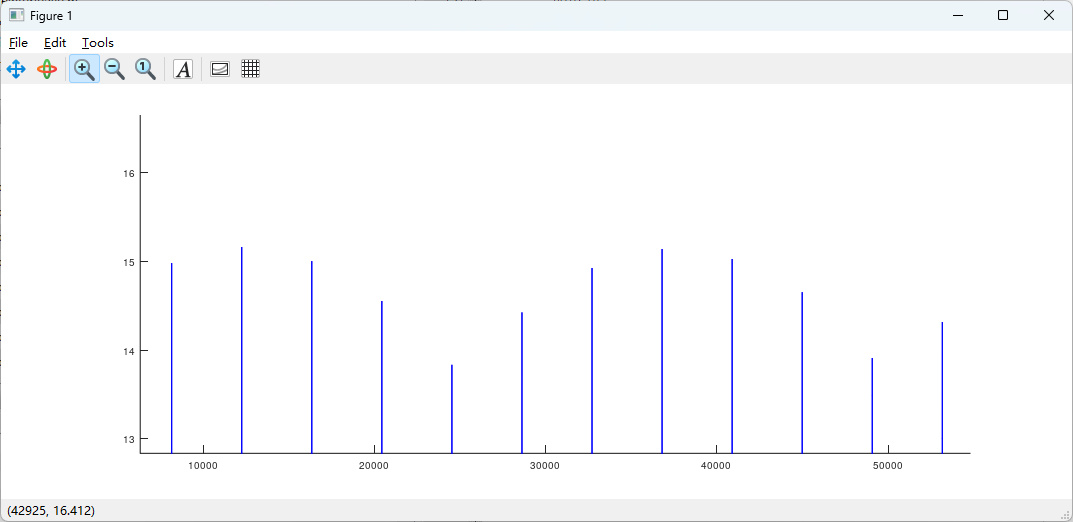 可以看到这就是个余弦。用上面的数据做FFT,求取补偿因子 cv_pay :
可以看到这就是个余弦。用上面的数据做FFT,求取补偿因子 cv_pay :
vpk = sqrt(var(prepeaks (:,2)));prepeaks (:,2) = (prepeaks (:,2) - mpk)/vpk * 100;ck_fft = prepeaks (:,2);cm_fft = abs(fft(ck_fft,1048576));[ci_fft,cv_fft] = max(cm_fft(1:1048576/2));cv_pay = cv_fft / 1048576/SYM;
cv_pay 的意思就是每个样点要补偿多少点,是个很小的数。太大了就不对了。
4.3 计算结果
本例子里是 3.9700e-05,1个符号产生 3.9700e-05 * N = 0.1626点偏移,在K=2时,每6个chirp就会冒一个点,每12个chip就会发生1次FFT峰值的移动,造成错误。用LoRaPHY的方法,计算出的是0.127,二者还是存在相当的差异。
5 基于 up-down chirp 边缘峰值交汇的时频差精确估计算法
由于存在第三部分的原因,无论是单独采用up chirp,还是 down chirp,都不能准确测定频差。但是,Lora存在一个up-down chirp的符号反转,构成了所谓的双线性调频(dual-chirp),就用这个波形进行匹配滤波。
5.1 笨办法观察规律
最笨的办法,就是两层 for 循环,把原始波形进行时间搬移、频率搬移,而后求取各个搬移参数下的相关峰。
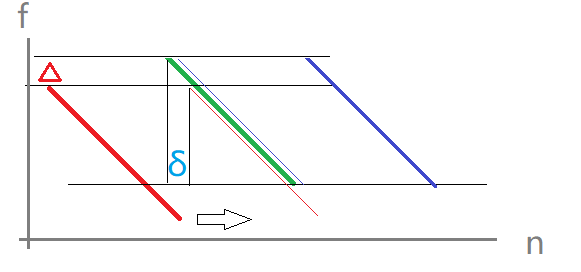
下图显示的是搜索的窗口。根据特定的频差,首先把载波乘以 e 2 π j Δ n e^{2\pi j \Delta n} e2πjΔn,而后,再平移 δ \delta δ样点,计算共轭相乘的和。
在窗口内,遍历所有的 Δ , δ \Delta,\delta Δ,δ,
D ( m , n ) = e 2 π j ( − 1 2 + Δ + m + δ 2 ⋅ 2 S F ⋅ K ) m + δ K ⋅ e − 2 π j ( − 1 2 + n 2 ⋅ 2 S F ⋅ K ) n K D(m,n)=e^{2\pi j (-\frac{1}{2}+\Delta+ \frac{m+\delta}{2\cdot2^{SF}\cdot K})\frac{m+\delta}{K}}\cdot e^{-2\pi j (-\frac{1}{2}+ \frac{n}{2\cdot2^{SF}\cdot K})\frac{n}{K}} D(m,n)=e2πj(−21+Δ+2⋅2SF⋅Km+δ)Km+δ⋅e−2πj(−21+2⋅2SF⋅Kn)Kn
while(pos < end_updownpos)x_ti = pos - start_updownpos + 1;for (x_fi = 1:searchf)sumsig = raw_iq(pos + chirp_n2).*exp(1j.*2*pi*(x_fi-searchf/2)/2./(2^SF)./K./K.*chirp_n2) .* chirp_updown(1+chirp_n2);sumv = abs(sum(sumsig));updown_tf(x_ti,x_fi) = sumv;endforpos = pos + 1;end %while
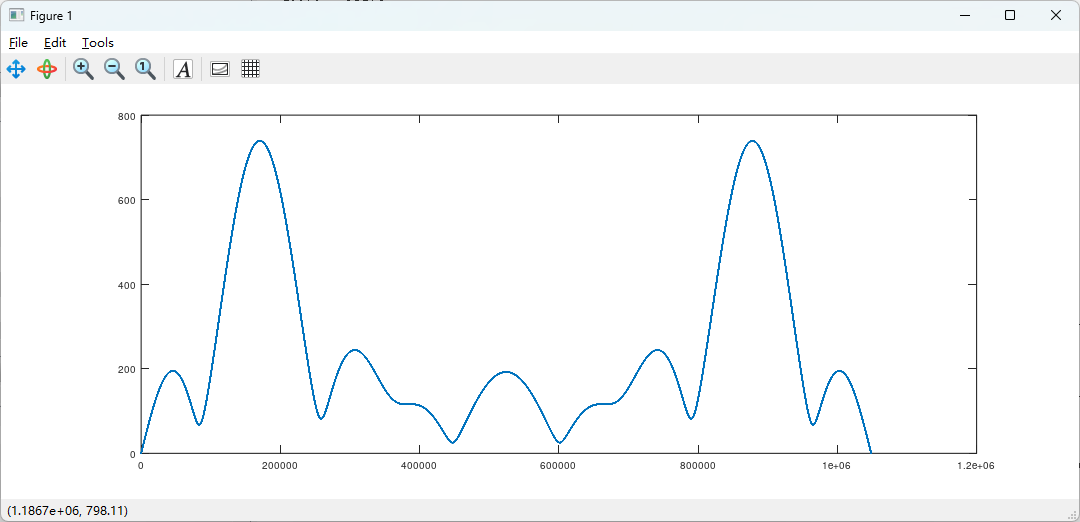
结果如下:
 这个计算极其耗时,实用性不高。不过,这个图却很好的说明了up-down chirp做时频二维相关的特点。
这个计算极其耗时,实用性不高。不过,这个图却很好的说明了up-down chirp做时频二维相关的特点。
- 中间的尖峰:时频都对准了,up,down同时相关上了,产生双倍的扩频增益。
- 两条相交的山脊:由于时频可以互补,发生了第三章阐述的平移,部分相关上1条(up或者down),另一条没有增益。
- 山脊是线性的、相交于尖峰。
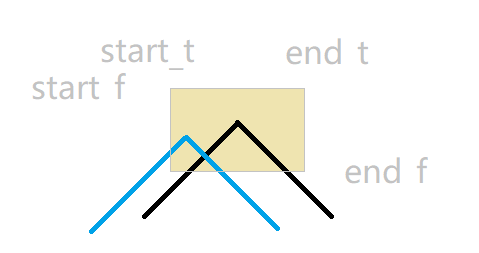
5.2 基于边缘最大值直线交点快速交汇的时频差估计
上面的这个算法,计算实在太慢了。注意到其实upchip,downchip各自的最大值在上述搜索窗口的边缘能够准确捕获,只要在边缘4个边上进行计算,而后通过连线交点估计位置即可。
if (pos < end_updownpos)x_ti = pos - start_updownpos + 1;for (x_fi = 1:searchf)if (pos>start_updownpos && pos+1<end_updownpos)if (x_fi>1 && x_fi<searchf)continue;endifendifsumsig = raw_iq(pos + chirp_n2).*exp(1j.*2*pi*(x_fi-searchf/2)/2./(2^SF)./K./K.*chirp_n2) .* chirp_updown(1+chirp_n2);sumv = abs(sum(sumsig));updown_tf(x_ti,x_fi) = sumv;endforpos = pos + 1;elsex_f = zeros(1,4);x_t = zeros(1,4);max_ct = 0;raw_tf = updown_tf;%找到4个峰值while (max_ct < 4)[max_xtv,max_xti] = max(updown_tf);[max_xfv,max_xfi] = max(max(updown_tf));curr_f = max_xfi;curr_t = max_xti(curr_f);updown_tf(curr_t,curr_f) = 0;check_pk = 1;fake_peak = 0;while (check_pk <= max_ct && fake_peak==0)distance = sqrt((x_f(check_pk) - curr_f)^2 +(x_t(check_pk) - curr_t)^2);if (distance < 16 * K)fake_peak = 1;endifcheck_pk = check_pk + 1;endwhileif (fake_peak==1)continue;endifmax_ct = max_ct + 1;x_f(max_ct) = curr_f;x_t(max_ct) = curr_t;endwhile%求直线交点xrge = size(updown_tf);[x_it1,y_it1] = intersection_point(x_t(1),x_f(1),x_t(2),x_f(2),x_t(3),x_f(3),x_t(4),x_f(4));[x_it2,y_it2] = intersection_point(x_t(1),x_f(1),x_t(3),x_f(3),x_t(2),x_f(2),x_t(4),x_f(4));[x_it3,y_it3] = intersection_point(x_t(1),x_f(1),x_t(4),x_f(4),x_t(2),x_f(2),x_t(3),x_f(3));if (x_it1 > 0 && x_it1 <xrge(1) && y_it1 > 0 && y_it1 <xrge(2))x_tc = floor(x_it1+0.5);x_fc = floor(y_it1+0.5);x_tf = x_it1;x_ff = y_it1;elseif (x_it2 > 0 && x_it2 <xrge(1) && y_it2 > 0 && y_it2 <xrge(2))x_tc = floor(x_it2+0.5);x_fc = floor(y_it2+0.5);x_tf = x_it2;x_ff = y_it2;elseif (x_it3 > 0 && x_it3 <xrge(1) && y_it3 > 0 && y_it3 <xrge(2))x_tc = floor(x_it3+0.5);x_fc = floor(y_it3+0.5);x_tf = x_it3;x_ff = y_it3;elsex_tc = xrge(1)/2;x_fc = xrge(2)/2;x_tf = x_tc;x_ff = x_fc;endifprintf('Finished.\n');if (x_ff - searchf/2 >0)payback_clk = cv_pay;elsepayback_clk = -cv_pay;endif%figure(2);pos = start_updownpos + x_tc - 1;syn_pos = start_updownpos + x_tc - 1;updown_tf = raw_tf;sumsig = raw_iq(pos + chirp_n2).*exp(1j.*2*pi*(x_ff-searchf/2)/2./(2^SF)./K./K.*chirp_n2) .* chirp_updown(1+chirp_n2);sumv = abs(sum(sumsig));updown_tf(x_tc,x_fc) = sumv;mesh(updown_tf);endif
结果:
 需要注意的是,第四步里估计的钟差是一个绝对值,要根据本方法提供的频差的正负号进行调整。当然,如果使用的设备时钟很精确,则可以直接使用 LoRaPHY使用的方法。
需要注意的是,第四步里估计的钟差是一个绝对值,要根据本方法提供的频差的正负号进行调整。当然,如果使用的设备时钟很精确,则可以直接使用 LoRaPHY使用的方法。
6 卡住位置补偿解调
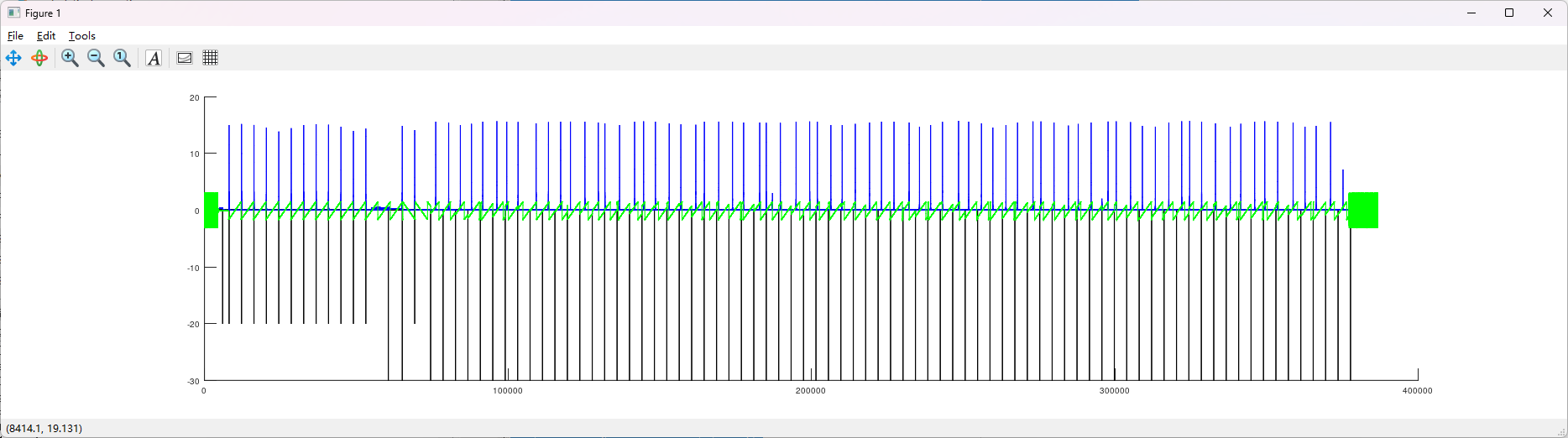
一旦找到了精确的时间、频率,则可以对剩余部分进行解调。解调的方法就是先乘以 down-chip,做fft、折半到 B带宽后,读取峰值的位置。
%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%3. 解调if (status==3)draw_mark(pos) = -30;%搬移频率到0中心data = raw_iq(pos:pos+SYM-1).*exp(1j.*2*pi*(deltaf-searchf/2)/2./(2^SF)./K./K.*chirp_n).*chirp_dw_dem;fft_data_raw = abs(fftshift(fft(data,SYM)));code_len = SYM/K;if (K>1)wrp_N = SYM;wrp_P = wrp_N / 2;wrp_M = 2^(SF-1);fft_data_raw(wrp_P-wrp_M+1:wrp_P)= fft_data_raw(wrp_P-wrp_M+1:wrp_P) + fft_data_raw(wrp_P+wrp_M+1:wrp_P+2*wrp_M);fft_data_raw(wrp_P+1:wrp_P+wrp_M)= fft_data_raw(wrp_P+1:wrp_P+wrp_M) + fft_data_raw(wrp_P-2*wrp_M+1:wrp_P-wrp_M);fft_data1 = fft_data_raw(wrp_P-wrp_M+1:wrp_P+wrp_M);elsefft_data1 = fft_data_raw;endif[codev,code_d] = max(fft_data1);fft_data = fft_data1;draw_hdseq(pos:pos+code_len-1)=fft_data/K;figure(1);clf;hold on;plot(draw_mark,'k');plot(draw_hdseq*30/SYM,'b');plot(draw_freqs,'g');hold off;pause(0.001);raw_demsym(1,codi) = mod(code_d+2^(SF-1),2^SF);codi = codi + 1;%样点偏移补偿(timeing offset),这里存疑,因为 payback_clk 是靠频偏估计的clk_pay = clk_pay + SYM;PZ = payback_clk * codi * SYM;pos = round(pos_start + clk_pay + PZ);endif
输出:
>>>lora_decode
Hit up!!20406 24502
Hit up!!24502 28599
Hit up!!28599 32695
Hit up!!32695 36791
Hit up!!36791 40887
Hit up!!40887 44983
Hit up!!44983 49079
Hit up!!49079 531760 1.1271e+024.0960e+03 7.8453e+018.1920e+03 -1.6873e+011.2288e+04 -1.6863e+021.6385e+04 -4.3814e+012.0481e+04 6.2779e+012.4577e+04 1.0725e+022.8673e+04 8.4182e+013.2769e+04 4.2651e+003.6865e+04 -1.5306e+024.0962e+04 -6.7274e+01
xcorr pre-upchirp amp fft payback=3.97002e-05
Hit down!!65187 69283
Fine Time Freq begin...Finished.Columns 1 through 23:670 826 590 146 1818 326 1526 1170 966 950 858 2033 657 966 1101 1854 650 1563 1361 1820 1574 331 1120Columns 24 through 46:1761 133 1753 922 1027 1564 622 984 1461 1831 1472 1690 234 90 110 1004 325 1917 1740 908 142 261 1955Columns 47 through 69:140 1916 835 1426 1628 216 1417 1575 1021 1650 217 35 218 559 689 1294 1114 1590 304 1753 148 1437 1625Columns 70 through 75:543 369 1994 609 609 1015
解调后的符号,通过 LoRaPHY提供的解析方法,可以还原出实际的数据:
>>> lora_decode
Syn code start.start offset = 15, fix = 0
01ECAE9230011111111111111112222222222222222333333333333333344448F16
078357676000123456789ABCDEF0123456789ABCDEF0123456789ABCDEF0123CFF4
值得注意的是,上述解调后,从2.25符号往后,其实有15个符号(30样点)的偏差。这个偏差是固定的,可以直接根据头部校验搜索并找到。这个偏差的产生机制,并不是很清楚。
7 拉远距离(加白噪声)测试
我们添加一个比波形本身强度高10倍的噪声,相位已经没法看了,但通过相关,发现依旧能正确处理:
 在10倍的噪声下,首部的相位也有抖动,但大的周期还在。偶尔估计会出现偏差,但依旧能够较大概率解析出正确的数据(会出错)。
在10倍的噪声下,首部的相位也有抖动,但大的周期还在。偶尔估计会出现偏差,但依旧能够较大概率解析出正确的数据(会出错)。
8 代码获取和运行
参考代码库:a4_lora/octave
从本次摸索,我发现读别人的文章与自己摸索实现一下,认识程度是显著不同的。我想LoRa本身可能也采取了类似的时频差补偿算法,否则它那60多块钱的成本,以及巨大的参数公差,根本就收不好。
自己的Octave实现与网上的例子相比,既不要求安装matlab R2019以上这种20GB的工程数学软件,也不和GNU-Radio这种多层封装的实现发生关系。
要运行代码,请直接安装开源的计算工具 GNU-Octave (和Matlab很像,但没有版权问题,安装包在几百兆左右)。Octave也可以直接使用MSYS2的pacman -S来安装。本次的代码不依赖任何工具箱,包括communicaitons。
相关文章:
用于低成本接收机的LoRa SF11 500KHz波形检测解调算法
前一篇里,获取了LORAwan的物理层波形,并通过Octave查看了它的瞬时频率。LoRa是私有协议,网上已经有了很不错的开源的实现,如: S2_LoRa通信实验 LoRaPhy 以及GNU-Radio的Lora模块、LimeSDR的Lora实现。当我试图修改上…...

WEB防护
WEB防护的范围比较广,主要是指针对web安全而做的各种防御措施, 包含应对xss、csrf等漏洞攻击的应对方式。 Web防护是通过执行一系列针对HTTP/HTTPS的安全策略来专门为Web应用提供保护的一款产品, 主要用于防御针对网络应用层的攻击࿰…...

使用Jest进行JavaScript单元测试
💓 博客主页:瑕疵的CSDN主页 📝 Gitee主页:瑕疵的gitee主页 ⏩ 文章专栏:《热点资讯》 使用Jest进行JavaScript单元测试 引言 Jest 简介 安装 Jest 创建基本配置 编写测试用例 运行测试 快照测试 模拟函数 代码覆盖率…...

网络安全法详细介绍——爬虫教程
目录 [TOC](目录)一、网络安全法详细介绍1. 网络安全法的主要条款与作用2. 网络安全法与爬虫的关系3. 合法使用爬虫的指南 二、爬虫的详细教程1. 准备环境与安装工具2. 使用requests库发送请求3. 解析HTML内容4. 使用robots.txt规范爬虫行为5. 设置请求间隔6. 数据清洗与存储 三…...

PCB什么情况该敷铜,什么情况不该敷铜!
更多电路设计,PCB设计分享及分析,可关注本人微信公众号“核桃设计分享”! 这个是老生常谈的问题了,可私底下还是有很多小伙伴问核桃这个问题,所以今天就好好聊一聊这个话题。 先说结论:PCB不是什么时候都可…...
标准化的企业级信息管理系统信息中心必备PHP低代码平台
谈谈企业级信息管理系统! 1. 标准化的企业级信息管理系统是信息中心必备,这才是集团该用的信息化管理系统。其有个很大特点是便于开发,能服务于企业技术中心,为其提供强大工具能力,在工具能力架构下通过流程、表单、报…...

Rust 力扣 - 1984. 学生分数的最小差值
文章目录 题目描述题解思路题解代码题目链接 题目描述 题解思路 原数组 nums 排序,遍历nums中下标为[0, nums.len() - k]的学生分数 假设当前遍历的下标为i则,以 i 下标为最小值的学生分数的最小差值为nums[i k - 1] - nums[i] 取最小差值的最小值即…...
【098】基于SpringBoot+Vue实现的垃圾分类系统
系统介绍 视频演示 基于SpringBootVue实现的垃圾分类系统 基于SpringBootVue实现的垃圾分类系统设计了三种角色、分别是管理员、垃圾分类管理员、用户,实现了个人中心、用户管理、垃圾分类管理员管理、垃圾分类管理、垃圾类型管理、垃圾图谱管理、系统管理等功能 …...

STM32CUBEIDE FreeRTOS操作教程(八):queues多队列
STM32CUBEIDE FreeRTOS操作教程(八):queues多队列 STM32CUBE开发环境集成了STM32 HAL库进行FreeRTOS配置和开发的组件,不需要用户自己进行FreeRTOS的移植。这里介绍最简化的用户操作类应用教程。以STM32F401RCT6开发板为例&#…...

SIGNAL TAP使用记录
一、首先编译工程 二、打开signal tap,并设置抓取时钟以及采样深度 二、点击set up,然后双击空白处,会弹出右侧窗口,点击filter选择pre_synthesis,这里选择综合前的信号观测,要确保左侧窗口内的信号是黑色…...

基于vue3和elementPlus的el-tree组件,实现树结构穿梭框,支持数据回显和懒加载
一、功能 功能描述 数据双向穿梭:支持从左侧向右侧转移数据,以及从右侧向左侧转移数据。懒加载支持:支持懒加载数据,适用于大数据量的情况。多种展示形式:右侧列表支持以树形结构或列表形式展示。全选与反选…...

彻底理解链表(LinkedList)结构
目录 比较操作结构封装单向链表实现面试题 循环链表实现 双向链表实现 链表(Linked List)是一种线性数据结构,由一组节点(Node)组成,每个节点包含两个部分:数据域(存储数据ÿ…...

TON 区块链开发的深入概述#TON链开发#DAPP开发#交易平台#NFT#Gamefi链游
区块链开发领域发展迅速,各种平台为开发人员提供不同的生态系统。其中一个更有趣且越来越相关的区块链是TON(开放网络)区块链。TON 区块链最初由 Telegram 构思,旨在提供快速、安全且可扩展的去中心化应用程序 (dApp)。凭借其独特…...

Hive专栏概述
Hive专栏概述 Hive“出身名门”,是最初由Facebook公司开发的数据仓库工具。它简单且容易上手,是深入学习Hadoop技术的一个很好的切入点。专栏内容包括:Hive的安装和配置,其核心组件和架构,Hive数据操作语言,…...

鼠标悬停后出现小提示框实现方法
大家在网页上会经常看到某些图标或文字,当鼠标悬停后会在四周某个位置出现一个简短的文字提示,这种提示分为两种,一种是提示固定的文字,例如放在qq图标上,会显示固定的文字“QQ”;第二种是显示鼠标所在标签…...

计算机视觉常用数据集Foggy Cityscapes的介绍、下载、转为YOLO格式进行训练
我在寻找Foggy Cityscapes数据集的时候花了一番功夫,因为官网下载需要用公司或学校邮箱邮箱注册账号,等待审核通过后才能进行下载数据集。并且一开始我也并不了解Foggy Cityscapes的格式和内容是什么样的,现在我弄明白后写下这篇文章…...

css中的样式穿透
1. >>> 操作符 <style scoped> /* 影响子组件的样式 */ .parent >>> .child {color: red; } </style>注意:>>> 操作符在某些预处理器(如Sass)中可能无法识别,因为它不是标准的CSS语法。 …...

MMCA:多模态动态权重更新,视觉定位新SOTA | ACM MM‘24 Oral
来源:晓飞的算法工程笔记 公众号,转载请注明出处 论文: Visual Grounding with Multi-modal Conditional Adaptation 论文地址:https://arxiv.org/abs/2409.04999论文代码:https://github.com/Mr-Bigworth/MMCA 创新点 提出了多模…...
)
linux同步执行命令脚本 (xcall)
linux同步执行命令脚本 (xcall) 1、在/usr/local/bin目录下 创建xcall文件 vim /usr/local/bin/xcall2、输入内容 #!/bin/bash # 获取控制台指令 判断指令是否为空 pcount$# if((pcount0)); thenecho "command can not be null !"exit fifor host in bigdata01 …...

opencv - py_imgproc - py_grabcut GrabCut 算法提取前景
文章目录 使用 GrabCut 算法进行交互式前景提取目标理论演示 使用 GrabCut 算法进行交互式前景提取 目标 在本章中 我们将了解 GrabCut 算法如何提取图像中的前景我们将为此创建一个交互式应用程序。 理论 GrabCut 算法由英国剑桥微软研究院的 Carsten Rother、Vladimir K…...

别再手动画UML了!用IDEA Diagrams插件自动生成类关系图,附赠符号含义速查表
高效架构可视化:IDEA Diagrams插件全指南与UML符号解析 在软件开发过程中,清晰的架构设计是团队协作和代码维护的基石。传统的手绘UML类图不仅耗时费力,更难以与快速迭代的代码保持同步。JetBrains IDEA内置的Diagrams插件正是为解决这一痛点…...
)
别再死记硬背排序了!‘原地哈希’如何用交换搞定特定数组排序(保姆级图解)
别再死记硬背排序了!‘原地哈希’如何用交换搞定特定数组排序(保姆级图解) 每次提到排序算法,你的第一反应是不是快速排序、归并排序这些经典方法?但面对特定场景的数组排序,这些"大炮打蚊子"式的…...

STM32F103C8T6新手必看:SWD、JTAG、串口三种下载方式到底怎么选?
STM32F103C8T6开发入门:SWD、JTAG与串口下载方式深度解析 第一次接触STM32开发板时,面对板子上密密麻麻的接口和文档中提到的各种下载方式,很多新手都会感到迷茫。我清楚地记得自己刚开始学习时,拿着ST-Link调试器却不知道应该连接…...

深入RISC-V链接脚本:从.lds文件看C程序的内存‘出生’与‘搬家’全过程
深入RISC-V链接脚本:从.lds文件看C程序的内存‘出生’与‘搬家’全过程 在嵌入式开发的世界里,一个C程序从源代码到最终在硬件上运行,经历了编译、链接和加载三个关键阶段。这个过程就像一个人的生命历程:编译是"出生"&…...

C语言字符串处理算法:反转、回文检测等实用技巧终极指南
C语言字符串处理算法:反转、回文检测等实用技巧终极指南 【免费下载链接】c Implementation of All ▲lgorithms in C Programming Language 项目地址: https://gitcode.com/gh_mirrors/c3/c 你是否在寻找C语言字符串处理的高效方法?🤔…...

Kaggle竞赛技能加速器:从特征工程到模型集成的系统化实战指南
1. 项目概述:一个为Kaggle竞赛量身定制的技能加速器如果你在数据科学竞赛的圈子里待过一阵子,大概率听说过Kaggle。这个平台就像一个全球数据科学家的“奥林匹克竞技场”,从预测房价到识别癌细胞,各种现实世界的问题被包装成竞赛&…...

第一次喝精酿怎么品
精酿酒吧新手指南:四步解锁品酒技巧,轻松告别困惑第一次走进精酿酒吧,新手常因陌生酒名和风味描述困惑。其实品精酿很简单,掌握几个步骤即可入门——这种认真品酒的态度,早在中世纪就有,欧洲修士们酿造后会…...

RMSNorm:均方根归一化总结
RMSNorm:均方根归一化总结 1. RMSNorm 是什么? RMSNorm 的全称是 Root Mean Square Normalization,中文可以叫:均方根归一化它是 Transformer 大模型中常用的一种归一化方法,例如 LLaMA、Qwen、DeepSeek、Gemma 等模型…...

别再熬大夜改论文了!okbiye AI 写作,把毕业论文从选题到终稿焊在及格线以上
okbiye-免费查重复率aigc检测/开题报告/毕业论文/智能排版/文献综述/AI PPT毕业论文 - Okbiye智能写作https://www.okbiye.com/ai/bylw 打开电脑,对着空白的 Word 文档发呆,开题报告和初稿大纲改了又改,导师的红批注比正文还长,格…...

Cesium动态扩散圆与圆环效果实现:CallbackProperty与ImageMaterialProperty实战
1. Cesium动态扩散圆与圆环效果概述 动态扩散圆和圆环效果是Cesium中常见的数据可视化手段,广泛应用于地图标注、区域预警等场景。这种效果通过动态改变几何属性和材质纹理,创造出脉冲式的视觉反馈,能够有效吸引用户注意力。 核心实现原理&am…...