STM32 出租车计价器系统设计(一) 江科大源码改写
STM32 出租车计价器系统设计
功能目标
驱动步进电机模拟车轮旋转,并实现调速功能。
设置车轮周长和单价,检测车轮转速和运转时间。
计算并显示行驶里程和价格。
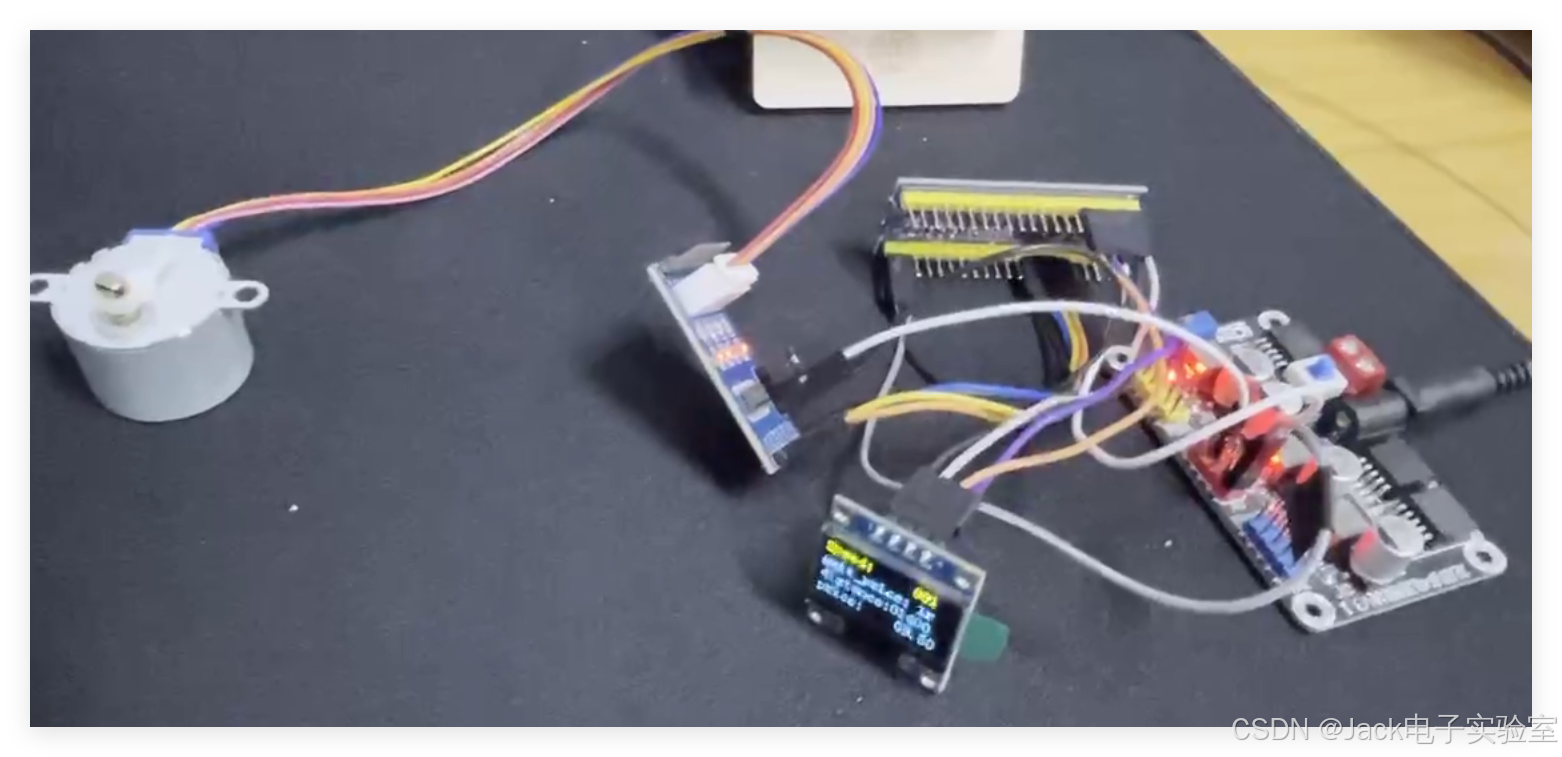
硬件材料
28BYJ48 五线四相步进电机和 ULN2003 驱动板模块
测速传感器模块
嵌入式小系统STM32
电源模块

出租车计费规则假设:
unit_price:设置每圈的价格为 1 元。
distance_of_qibu:设定起步距离为 1000cm,起步价为 7.5 元。
price、distance:分别用于存储当前价格和行驶距离,初始值为 0。
circumference:假设车轮周长为 200cm
float unit_price = 1;
int distance_of_qibu = 1000;
float price = 0;
float distance = 0;
float circumference = 200;
OLED 显示初始化内容
OLED_ShowString(1, 1, "Speed:");
OLED_ShowString(2, 1, "unit_price:");
OLED_ShowString(2, 14, "r");
OLED_ShowString(3, 1, "distance:");
OLED_ShowString(4, 1, "price:");
while中 OLED更新显示
OLED_ShowNum(1, 12, Speed - 1, 3);
OLED_ShowNum(2, 13, unit_price, 1);
OLED_ShowNum(3, 10, distance, 5);
OLED_ShowFNum(4, 10, price, 4, 2);
OLED 界面

电机驱动
主要就是步进电机的控制,单片机IO口驱动能力较差,所以需要驱动模块
这里使用 ULN2003 驱动 步进电机28BYJ48
电机驱动代码
#include "stm32f10x.h" // Device header
#include "Delay.h"
#include "Key.h"
#include "Stepper.h"uint8_t STEP; // 用于存储电机正在走过的整步编号
/*** @brief 步进电机输出端GPIO初始化函数* @param 无* @retval 无*/
void Stepper_GPIOInit(void)
{// 选择PA0,PA1,PA2,PA3分别为相A,B,C,D的输出RCC_APB2PeriphClockCmd(Stepper_CLK, ENABLE);GPIO_InitTypeDef GPIO_InitStruct;GPIO_InitStruct.GPIO_Mode = GPIO_Mode_Out_PP; // 推挽输出GPIO_InitStruct.GPIO_Pin = Stepper_LA | Stepper_LB | Stepper_LC | Stepper_LD;GPIO_InitStruct.GPIO_Speed = GPIO_Speed_50MHz;GPIO_Init(Stepper_Output_GPIO, &GPIO_InitStruct);GPIO_ResetBits(Stepper_Output_GPIO, Stepper_LA | Stepper_LB | Stepper_LC | Stepper_LD);
}/*** @brief 电机停转函数* @param 无* @retval 无*/
void Stepper_Stop(void)
{GPIO_ResetBits(Stepper_Output_GPIO, Stepper_LA | Stepper_LB | Stepper_LC | Stepper_LD);
}/*** @brief 4拍单相整步驱动函数* @param StepNum 整步编号,0~3对应A~D* @param Delay_Time_xms 每步旋转后延时时间x ms,用于控制步进电机速度(一般需大于等于2)* @retval 无*/
void Stepper_SingleStep(uint8_t StepNum, uint16_t Delay_Time_xms)
{switch(StepNum){case 0: // AGPIO_WriteBit(Stepper_Output_GPIO, Stepper_LA, Bit_SET);GPIO_WriteBit(Stepper_Output_GPIO, Stepper_LB | Stepper_LC | Stepper_LD, Bit_RESET);break;case 1: // BGPIO_WriteBit(Stepper_Output_GPIO, Stepper_LB, Bit_SET); GPIO_WriteBit(Stepper_Output_GPIO, Stepper_LA | Stepper_LC | Stepper_LD, Bit_RESET);break; case 2: // CGPIO_WriteBit(Stepper_Output_GPIO, Stepper_LC, Bit_SET); GPIO_WriteBit(Stepper_Output_GPIO, Stepper_LA | Stepper_LB | Stepper_LD, Bit_RESET);break;case 3: // DGPIO_WriteBit(Stepper_Output_GPIO, Stepper_LD, Bit_SET);GPIO_WriteBit(Stepper_Output_GPIO, Stepper_LA | Stepper_LB | Stepper_LC, Bit_RESET);break;default: break;}Delay_ms(Delay_Time_xms); // 延时,控制电机速度Stepper_Stop(); // 断电,防止电机过热
}/*** @brief 步进电机按步旋转* @param direction 电机旋转方向,可以是Foreward(正传)或者Reversal(反转)* @param step 电机转过的步数* @param Delay_Time_xms 每步旋转后延时时间x ms,用于控制步进电机速度(一般需大于等于2)* @retval 无*/
void Stepper_RotateByStep(RotDirection direction, uint32_t step, uint16_t Delay_Time_xms)
{for (uint32_t i = 0; i < step; i ++){if (direction == Foreward) // 电机正传{STEP ++;if (STEP > 3){STEP = 0;}}else if (direction == Reversal) // 电机反转{if (STEP < 1){STEP = 4;}STEP --;}Stepper_SingleStep(STEP, Delay_Time_xms);}}/*** @brief 步进电机按整数圈旋转* @param direction 电机旋转方向,可以是Foreward(正传)或者Reversal(反转)* @param Loop 电机旋转的圈数* @param Delay_Time_xms 每步旋转后延时时间x ms,用于控制步进电机速度(一般需大于等于2)* @retval */
int Stepper_RotateByLoop(RotDirection direction, uint32_t Loop, uint16_t Delay_Time_xms)
{Stepper_RotateByStep(direction, Loop * 2048, Delay_Time_xms);return Loop;
}#ifndef __STEPPER_H_
#define __STEPPER_H_// 电机的旋转方向
typedef enum
{Foreward = 0,Reversal = 1
} RotDirection;// 需要使用其他端口时,只需要更改以下的宏定义即可
// 这里需要保证四个输出端口同属一个GPIO
// 如果不能满足这一点,需要更改Stepper.c中初始化函数Stepper_Init和Stepper_RotateByStep中的一些变量名称
// 这里的宏定义是为了提高程序的可读性和可移植性,但使用stm32f10x.h中定义的原始名称也未尝不可
#define Stepper_CLK RCC_APB2Periph_GPIOA
#define Stepper_Output_GPIO GPIOA
#define Stepper_LA GPIO_Pin_0
#define Stepper_LB GPIO_Pin_1
#define Stepper_LC GPIO_Pin_2
#define Stepper_LD GPIO_Pin_3void Stepper_GPIOInit(void);
void Stepper_Stop(void);
void Stepper_SingleStep(uint8_t StepNum, uint16_t Delay_Time_xms);
void Stepper_RotateByStep(RotDirection direction, uint32_t step, uint16_t Delay_Time_xms);
int Stepper_RotateByLoop(RotDirection direction, uint32_t Loop, uint16_t Delay_Time_xms);#endif上面是电机驱动.c .h文件 接线也很简单 看宏定义就可以,想要具体原理,可以看网上的资料
用杜邦线接线真的很麻烦,后面准备简单画一个PCB
通过按键实现电机调速,这边加上按键中断会比较好。因为步进电机的简单代码中,会有延时函数,导致按键没有被读到。
也可以通过PWM控制电机进行调速。
有问题可以私聊我
相关文章:
STM32 出租车计价器系统设计(一) 江科大源码改写
STM32 出租车计价器系统设计 功能目标 驱动步进电机模拟车轮旋转,并实现调速功能。 设置车轮周长和单价,检测车轮转速和运转时间。 计算并显示行驶里程和价格。 硬件材料 28BYJ48 五线四相步进电机和 ULN2003 驱动板模块 测速传感器模块 嵌入式小系统…...
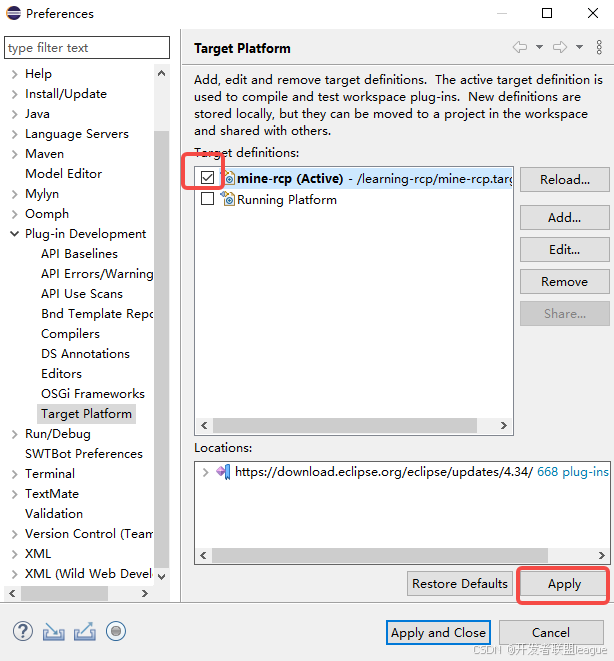
eclipse rcp-创建rcp-创建target
1.创建一个target文件,将其命名为mine-rcp.target 2. 编辑target 2.1 点击add按钮,选中software site 2.2 选择一个software site 打开浏览器。 选择一个合适的eclipse作为基础版本。进入https://download.eclipse.org/eclipse/downloads/https://dow…...

微信小程序--创建一个日历组件
微信小程序–创建一个日历组件 可以创建一个日历组件,来展示当前月份的日期,并支持切换月份的功能。 一、目录结构 /pages/calendarcalendar.wxmlcalendar.scsscalendar.jscalendar.json二、calendar.wxml <view class"calendar"><…...

质量问题分析与改进常见方法
大同小异,本质都是定位、解决、推广三大步双归零 技术归零五条要求:“定位准确、机理清楚、问题复现、措施有效、举一反三”。 管理归零五条要求:“过程清楚、责任明确、措施落实、严肃处理、完善规章”。 航天FRACASFRACAS ,是“…...

质数的和与积
质数的和与积 C语言代码C 代码Java代码Python代码 💐The Begin💐点点关注,收藏不迷路💐 两个质数的和是S,它们的积最大是多少? 输入 一个不大于10000的正整数S,为两个质数的和。 输出 一个整…...

数据结构 (35)分配类排序
前言 分配类排序是数据结构中的一种重要排序方法,其核心思想是利用分配和收集过程对元素进行排序,而无需比较元素之间的关键字。这种方法突破了基于关键字比较的排序算法的时间下界,可以达到线性时间复杂度O(n)。 一、分配类排序的基本概念 分…...

Cesium隐藏默认控件
终于有时间开始整理下知识点了。 开搞 本地环境 vue3vitecesiumvite和cesium都是最新版本这里有个问题需要注意,就是如何为Cesium配置Vite,随便检索一下,大部分都时通过插件【vite-plugin-cesium】作为解决方案,我本地创建新的示…...
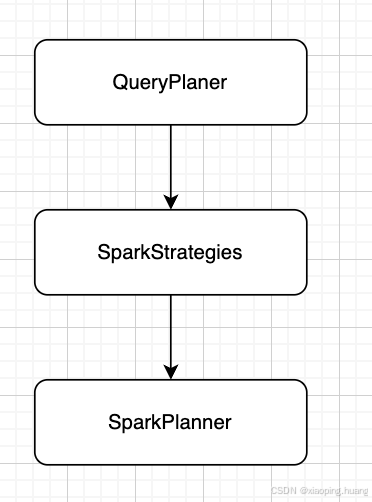
Spark SQL 执行计划解析源码分析
本文用于记录Spark SQL执行计划解析的源码分析。文中仅对关键要点进行提及,无法面面具到,仅描述大体的框架。 Spark的Client有很多种,spark-sql,pyspark,spark- submit,R等各种提交方式,这里以…...

rabbitMq举例
新来个技术总监,把 RabbitMQ 讲的那叫一个透彻,佩服! 生产者 代码举例 public String sendMsg(final String exchangeName,final String routingKey,final String msg) {} /*** 发送消息* param exchangeName exchangeName* param routin…...

奇怪的知识又增加了:ESP32下的Lisp编程=>ULisp--Lisp for microcontrollers
ESP32下有MicroPython,那么我就在想,有Lisp语言支持吗?答案是果然有!有ULisp,专门为MCU设计的Lisp! 网址:uLisp - Lisp for microcontrollers 介绍:用于微控制器的 Lisp 适用于 Ar…...

渗透测试之信息收集
免责声明:使用本教程或工具,用户必须遵守所有适用的法律和法规,并且用户应自行承担所有风险和责任。 文章目录 1. 基础信息收集2. 网络资产发现3. 网站和应用信息4. 技术栈识别5. 安全漏洞和配置6. 移动应用分析7.Google语法常见Google使用场…...

基本分页存储管理
一、实验目的 目的:熟悉并掌握基本分页存储管理的思想及其实现方法,熟悉并掌握基本分页存储管理的分配和回收方式。 任务:模拟实现基本分页存储管理方式下内存空间的分配和回收。 二、实验内容 1、实验内容 内存空间的初始化——可以由用户输…...
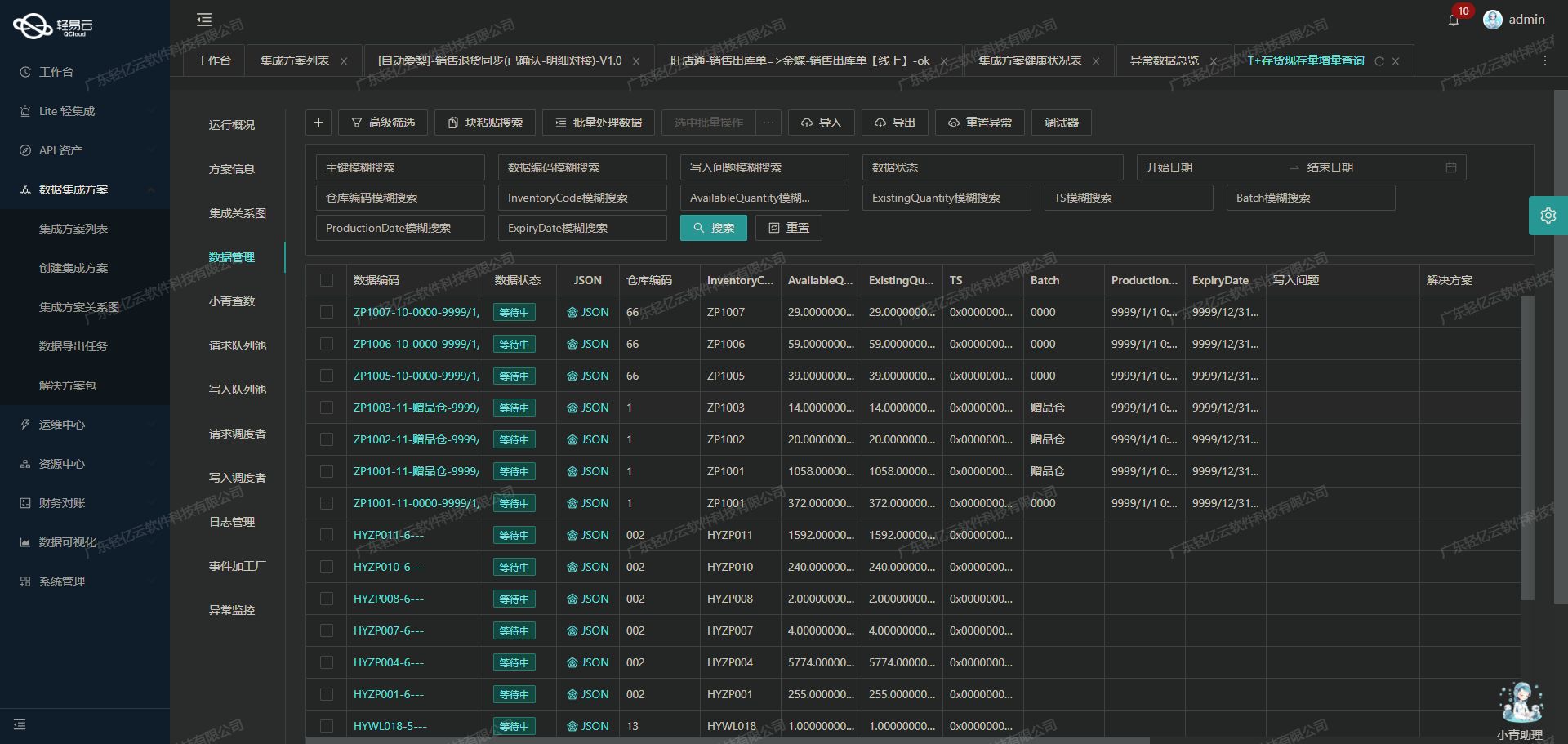
SQLServer到MySQL的数据高效迁移方案分享
SQL Server数据集成到MySQL的技术案例分享 在企业级数据管理中,跨平台的数据集成是一个常见且关键的任务。本次我们将探讨如何通过轻易云数据集成平台,将巨益OMS系统中的退款单明细表从SQL Server高效、安全地迁移到MySQL数据库中。具体方案名称为“7--…...

软考:工作后再考的性价比分析
引言 在当今的就业市场中,软考(软件设计师、系统分析师等资格考试)是否值得在校学生花费时间和精力去准备?本文将从多个角度深入分析软考在不同阶段的性价比,帮助大家做出明智的选择。 一、软考的价值与局限性 1.1 …...

shell编程(完结)
shell编程(完结) 声明! 学习视频来自B站up主 泷羽sec 有兴趣的师傅可以关注一下,如涉及侵权马上删除文章 笔记只是方便各位师傅的学习和探讨,文章所提到的网站以及内容,只做学习交流,其…...

UNIX数据恢复—UNIX系统常见故障问题和数据恢复方案
UNIX系统常见故障表现: 1、存储结构出错; 2、数据删除; 3、文件系统格式化; 4、其他原因数据丢失。 UNIX系统常见故障解决方案: 1、检测UNIX系统故障涉及的设备是否存在硬件故障,如果存在硬件故障…...

adb连接逍遥安卓模拟器失败的问题解决方案
1、逍遥安卓模拟器进入系统应用,设置-关于平板电脑-版本号,连续点击3次以上,直到提示进入开发者模式,返回设置界面,进入【开发者选项】-【USB调试】开启,之后重启模拟器再次adb尝试连接。 2、android stud…...

【昇腾】NPU ID:物理ID、逻辑ID、芯片映射关系
起因: https://www.hiascend.com/document/detail/zh/Atlas%20200I%20A2/23.0.0/re/npu/npusmi_013.html npu-smi info -l查询所有NPU设备: [naienotebook-npu-bd130045-55bbffd786-lr6t8 DCNN]$ npu-smi info -lTotal Count : 1NPU…...
Three.js曲线篇 8.管道漫游
目录 创建样条曲线 创建管道 透视相机漫游 完整代码 大家不要被这个“管道漫游”这几个字所蒙骗了,学完后大家就知道这个知识点有多脏了。我也是误入歧途,好奇了一下“管道漫游”。好了,现在就给大家展示一下为啥这个只是点脏了。 我也废话…...

scala基础_数据类型概览
Scala 数据类型 下表列出了 Scala 支持的数据类型: 类型类别数据类型描述Scala标准库中的实际类基本类型Byte8位有符号整数,数值范围为 -128 到 127scala.Byte基本类型Short16位有符号整数,数值范围为 -32768 到 32767scala.Short基本类型I…...
指标解析——专业级语音稳定性评估体系首度披露)
【限时解密】ElevenLabs未公开的“Voice Stability Index”(VSI)指标解析——专业级语音稳定性评估体系首度披露
更多请点击: https://intelliparadigm.com 第一章:【限时解密】ElevenLabs未公开的“Voice Stability Index”(VSI)指标解析——专业级语音稳定性评估体系首度披露 VSI 的本质与工程意义 Voice Stability Index(VSI&…...

初次使用Taotoken平台从注册到完成API调用的全程指引
🚀 告别海外账号与网络限制!稳定直连全球优质大模型,限时半价接入中。 👉 点击领取海量免费额度 初次使用Taotoken平台从注册到完成API调用的全程指引 对于初次接触大模型API的开发者而言,从注册平台到成功发出第一个…...
)
Python+OpenCV+PyQt5+SVM实现车牌识别系统(源码)
目录 一、项目背景 二、技术介绍 三、功能介绍 四、 代码设计 五、系统实现 一、项目背景 随着我国城市化进程的不断加快,机动车保有量呈现持续快速增长态势。据公安部统计,2024年全国机动车保有量已突破4.5亿辆,其中汽车占比超过80%。…...

基于MCP协议与向量数据库构建AI编程助手私有记忆系统
1. 项目概述:为你的AI编程助手打造一个“记忆宫殿”如果你和我一样,重度依赖Cursor这类AI编程助手,那你肯定遇到过这个痛点:昨天刚和它深入讨论过一个复杂的业务逻辑实现,今天想参考一下,却发现在浩如烟海的…...

终极指南:如何使用Azure Quickstart Templates实现成本管理与预算警报
终极指南:如何使用Azure Quickstart Templates实现成本管理与预算警报 【免费下载链接】azure-quickstart-templates Azure Quickstart Templates 项目地址: https://gitcode.com/gh_mirrors/az/azure-quickstart-templates Azure Quickstart Templates是微软…...

DreamBooth实战案例:从人物肖像到艺术风格的完整训练过程
DreamBooth实战案例:从人物肖像到艺术风格的完整训练过程 【免费下载链接】sd_dreambooth_extension 项目地址: https://gitcode.com/gh_mirrors/sd/sd_dreambooth_extension DreamBooth是一款强大的AI模型训练工具,能够让你通过少量图片快速定制…...

从FPGA工程师的视角看AMBA总线:手把手教你用Verilog实现一个简易APB外设
从FPGA工程师的视角看AMBA总线:手把手教你用Verilog实现一个简易APB外设 在FPGA和数字IC设计领域,AMBA总线协议就像城市中的交通网络,负责协调各个功能模块之间的数据流动。而APB(Advanced Peripheral Bus)作为AMBA家族…...

Namespace 为什么不够用了:容器逃逸的技术原理与真实攻击链
Namespace 为什么不够用了:容器逃逸的技术原理与真实攻击链 一、共享内核的致命假设 Docker 容器的核心隔离机制是 Linux Namespace cgroups。Namespace 让进程误以为自己独占 PID、网络和文件系统,cgroups 限制 CPU、内存、IO 的使用上限。这套机制将部…...

如何在浏览器中重新解锁微信网页版?一款开源插件为你提供完美解决方案
如何在浏览器中重新解锁微信网页版?一款开源插件为你提供完美解决方案 【免费下载链接】wechat-need-web 让微信网页版可用 / Allow the use of WeChat via webpage access 项目地址: https://gitcode.com/gh_mirrors/we/wechat-need-web 还在为微信网页版无…...

如何快速破解Cursor Pro限制:一键激活AI编程助手的完整指南
如何快速破解Cursor Pro限制:一键激活AI编程助手的完整指南 【免费下载链接】cursor-free-vip [Support 0.45](Multi Language 多语言)自动注册 Cursor Ai ,自动重置机器ID , 免费升级使用Pro 功能: Youve reached you…...