FreeRTOS例程2-任务挂起恢复与使用中断遇到的坑!
任务挂起简单点理解就是现在不需要执行这个任务,让它先暂停,就是挂起。恢复就是从刚才挂起的状态下继续运行。
API函数
任务挂起vTaskSuspend()
函数原型(tasks.c中):
void vTaskSuspend( TaskHandle_t xTaskToSuspend )
1.
参数:
xTaskToSuspend:需要挂起的任务句柄
任务恢复vTaskResume()
函数原型(tasks.c中):
void vTaskResume( TaskHandle_t xTaskToResume )
1.
参数:
xTaskToSuspend:需要恢复的任务句柄
中断函数中进行任务恢复xTaskResumeFromISR()
BaseType_t xTaskResumeFromISR( TaskHandle_t xTaskToResume )
1.
参数:
xTaskToSuspend:需要挂起的任务句柄
总结:
这几个函数用起来还是很简单的,只需要传入任务的句柄即可。
注意,任务挂起是没有FromISR版本的,所以在中断中貌似就不可以使用任务挂起了。
程序验证
在上个例程的基础上,增加一个按键检测任务和外部中断函数,用来测试任务挂起与恢复。
按键任务
//key任务函数
void key_task(void *pvParameters)
{
u8 key;
static uint8_t flag=0;
while(1)
{
key=KEY_Scan(0);
switch(key)
{
case KEY1_PRES:
if(!flag)
{
vTaskSuspend(Task1Task_Handler);//挂起任务1
printf("1 suspend\r\n");
}
else
{
vTaskResume(Task1Task_Handler); //恢复任务1
printf("1 resume\r\n");
}
flag=~flag;
break;
case K_UP_PRES:
vTaskSuspend(Task2Task_Handler);//挂起任务2
printf("2 suspend\r\n");
break;
}
vTaskDelay(10); //延时10ms
}
}
中断配置与中断函数
//==============中断相关配置
void EXTIX_Init(void)
{
NVIC_InitTypeDef NVIC_InitStructure;
EXTI_InitTypeDef EXTI_InitStructure;
//KEY_Init(); //按键对应的IO口初始化
RCC_APB2PeriphClockCmd(RCC_APB2Periph_SYSCFG, ENABLE);//使能SYSCFG时钟
SYSCFG_EXTILineConfig(EXTI_PortSourceGPIOE, EXTI_PinSource4);//PE4 连接到中断线4
/* 配置EXTI_Line4 */
EXTI_InitStructure.EXTI_Line = EXTI_Line4;
EXTI_InitStructure.EXTI_Mode = EXTI_Mode_Interrupt; //中断事件
EXTI_InitStructure.EXTI_Trigger = EXTI_Trigger_Falling; //下降沿触发
EXTI_InitStructure.EXTI_LineCmd = ENABLE; //中断线使能
EXTI_Init(&EXTI_InitStructure); //配置
NVIC_InitStructure.NVIC_IRQChannel = EXTI4_IRQn; //外部中断4
NVIC_InitStructure.NVIC_IRQChannelPreemptionPriority = 0x06;//抢占优先级6
NVIC_InitStructure.NVIC_IRQChannelSubPriority = 0x00; //子优先级0
NVIC_InitStructure.NVIC_IRQChannelCmd = ENABLE; //使能外部中断通道
NVIC_Init(&NVIC_InitStructure); //配置
}
//外部中断4服务程序
void EXTI4_IRQHandler(void)
{
BaseType_t YieldRequired;
//vTaskDelay(10); //消抖-------//中断函数中不可以使用vTaskDelay()!!!
if(KEY0==0)
{
//vTaskResume(Task2Task_Handler);//这里必须使用FromISR版本的!!!
YieldRequired=xTaskResumeFromISR(Task2Task_Handler);//恢复任务2
printf("2 resume\r\n");
if(YieldRequired==pdTRUE)
{
/*如果函数xTaskResumeFromISR()返回值为pdTRUE,那么说明要恢复的这个
任务的任务优先级等于或者高于正在运行的任务(被中断打断的任务),所以在
退出中断的时候一定要进行上下文切换!*/
portYIELD_FROM_ISR(YieldRequired);
}
}
EXTI_ClearITPendingBit(EXTI_Line4);//清除LINE4上的中断标志位
}
整个主函数
//*******************************************
//STM32F407+FreeRTOS 任务挂起与恢复(结合中断)
//File: main.c
//Author: xxpcb(wxgzh:码农爱学习)
//Version: V1.0
//Date: 2020/06/04
//*******************************************
#include "stm32f4xx.h"
#include "led.h"
#include "key.h"
#include "usart.h"
#include "FreeRTOS.h"
#include "task.h"
//任务参数--------------------------
//优先级 堆栈大小 任务句柄 任务函数
#define START_TASK_PRIO 1
#define START_STK_SIZE 128
TaskHandle_t StartTask_Handler;
void start_task(void *pvParameters);
#define TASK1_TASK_PRIO 3
#define TASK1_STK_SIZE 128
TaskHandle_t Task1Task_Handler;
void task1_task(void *pvParameters);
#define TASK2_TASK_PRIO 4
#define TASK2_STK_SIZE 128
TaskHandle_t Task2Task_Handler;
void task2_task(void *pvParameters);
#define KEY_TASK_PRIO 2
#define KEY_STK_SIZE 128
TaskHandle_t KeyTask_Handler;
void key_task(void *pvParameters);
void EXTIX_Init(void);
int main(void)
{
//设置系统中断优先级分组4(FreeRTOS中的默认方式!)
NVIC_PriorityGroupConfig(NVIC_PriorityGroup_4);
//初始化LED端口
LED_Init();
//初始化按键
KEY_Init();
//初始化外部中断
EXTIX_Init();
//串口初始化
uart_init(115200);
//创建开始任务
xTaskCreate((TaskFunction_t )start_task, //任务函数
(const char* )"start_task", //任务名称
(uint16_t )START_STK_SIZE, //任务堆栈大小
(void* )NULL, //传递给任务函数的参数
(UBaseType_t )START_TASK_PRIO, //任务优先级
(TaskHandle_t* )&StartTask_Handler); //任务句柄
//开启任务调度
vTaskStartScheduler();
}
//开始任务任务函数
void start_task(void *pvParameters)
{
taskENTER_CRITICAL(); //进入临界区
//创建TASK1任务
xTaskCreate((TaskFunction_t )task1_task,
(const char* )"task1_task",
(uint16_t )TASK1_STK_SIZE,
(void* )NULL,
(UBaseType_t )TASK1_TASK_PRIO,
(TaskHandle_t* )&Task1Task_Handler);
//创建TASK2任务
xTaskCreate((TaskFunction_t )task2_task,
(const char* )"task2_task",
(uint16_t )TASK2_STK_SIZE,
(void* )NULL,
(UBaseType_t )TASK2_TASK_PRIO,
(TaskHandle_t* )&Task2Task_Handler);
//创建KEY任务
xTaskCreate((TaskFunction_t )key_task,
(const char* )"key_task",
(uint16_t )KEY_STK_SIZE,
(void* )NULL,
(UBaseType_t )KEY_TASK_PRIO,
(TaskHandle_t* )&KeyTask_Handler);
vTaskDelete(StartTask_Handler); //删除开始任务
taskEXIT_CRITICAL(); //退出临界区
}
//task1任务函数
void task1_task(void *pvParameters)
{
while(1)
{
LEDa_Toggle;
vTaskDelay(500); //延时500ms
}
}
//task2任务函数
void task2_task(void *pvParameters)
{
while(1)
{
LEDb_ON;
vTaskDelay(200); //延时200ms
LEDb_OFF;
vTaskDelay(800); //延时800ms
}
}
//key任务函数
void key_task(void *pvParameters)
{
u8 key;
static uint8_t flag=0;
while(1)
{
key=KEY_Scan(0);
switch(key)
{
case KEY1_PRES:
if(!flag)
{
vTaskSuspend(Task1Task_Handler);//挂起任务1
printf("1 suspend\r\n");
}
else
{
vTaskResume(Task1Task_Handler); //恢复任务1
printf("1 resume\r\n");
}
flag=~flag;
break;
case K_UP_PRES:
vTaskSuspend(Task2Task_Handler);//挂起任务2
printf("2 suspend\r\n");
break;
}
vTaskDelay(10); //延时10ms
}
}
//==============中断相关配置
void EXTIX_Init(void)
{
NVIC_InitTypeDef NVIC_InitStructure;
EXTI_InitTypeDef EXTI_InitStructure;
//KEY_Init(); //按键对应的IO口初始化
RCC_APB2PeriphClockCmd(RCC_APB2Periph_SYSCFG, ENABLE);//使能SYSCFG时钟
SYSCFG_EXTILineConfig(EXTI_PortSourceGPIOE, EXTI_PinSource4);//PE4 连接到中断线4
/* 配置EXTI_Line4 */
EXTI_InitStructure.EXTI_Line = EXTI_Line4;
EXTI_InitStructure.EXTI_Mode = EXTI_Mode_Interrupt; //中断事件
EXTI_InitStructure.EXTI_Trigger = EXTI_Trigger_Falling; //下降沿触发
EXTI_InitStructure.EXTI_LineCmd = ENABLE; //中断线使能
EXTI_Init(&EXTI_InitStructure); //配置
NVIC_InitStructure.NVIC_IRQChannel = EXTI4_IRQn; //外部中断4
NVIC_InitStructure.NVIC_IRQChannelPreemptionPriority = 0x06;//抢占优先级6
NVIC_InitStructure.NVIC_IRQChannelSubPriority = 0x00; //子优先级0
NVIC_InitStructure.NVIC_IRQChannelCmd = ENABLE; //使能外部中断通道
NVIC_Init(&NVIC_InitStructure); //配置
}
//外部中断4服务程序
void EXTI4_IRQHandler(void)
{
BaseType_t YieldRequired;
//vTaskDelay(10); //消抖-------//中断函数中不可以使用vTaskDelay()!!!
if(KEY0==0)
{
//vTaskResume(Task2Task_Handler);//这里必须使用FromISR版本的!!!
YieldRequired=xTaskResumeFromISR(Task2Task_Handler);//恢复任务2
printf("2 resume\r\n");
if(YieldRequired==pdTRUE)
{
/*如果函数xTaskResumeFromISR()返回值为pdTRUE,那么说明要恢复的这个
任务的任务优先级等于或者高于正在运行的任务(被中断打断的任务),所以在
退出中断的时候一定要进行上下文切换!*/
portYIELD_FROM_ISR(YieldRequired);
}
}
EXTI_ClearITPendingBit(EXTI_Line4);//清除LINE4上的中断标志位
}
实验现象
程序运行起来后,两个LED任务按照自己的方式闪烁,按下KEY1,LED任务1挂起,即LED保持在常亮或常灭状态,再次按下KEY1,LED任务1恢复,即LED继续闪烁。按下KEY_UP,LED任务2挂起,再按下KEY0,LED任务2恢复。同时串口也会打印相关信息。
注意,中断程序中没有使用延时消抖,所以按下KEY0,从中断恢复任务时,可能会执行多次恢复,(1次挂起)多次恢复目前是没有什么影响的。
注意事项(避免程序卡死)!!!
中断函数中不可以使用vTaskDelay()!
实验中用到了按键作为中断,本想用vTaskDelay(10)进行消抖,结果是程序运行起来后,按下中断的按键,程序卡死,通过调试运行,发现程序死在了这里:
//port.c的429~443行
void vPortEnterCritical( void )
{
portDISABLE_INTERRUPTS();
uxCriticalNesting++;
/* This is not the interrupt safe version of the enter critical function so
assert() if it is being called from an interrupt context. Only API
functions that end in "FromISR" can be used in an interrupt. Only assert if
the critical nesting count is 1 to protect against recursive calls if the
assert function also uses a critical section. */
if( uxCriticalNesting == 1 )
{
configASSERT( ( portNVIC_INT_CTRL_REG & portVECTACTIVE_MASK ) == 0 );
}
}
英文注释的大致意思是:
这不是进入关键函数的中断安全版本,所以assert()如果是从中断上下文中调用的话。只有以“FromISR”结尾的API函数才能在中断中使用。只有在关键嵌套计数为1时才使用assert,以防止assert函数也使用关键部分时出现递归调用。
所以FreeRTOS的API函数只有带FromISR后缀的才能在中断函数中使用,而**vTaskDelay()**好像也没有FromISR版本,所以就不能使用!推而广之,其它不带FromISR后缀的API函数也不能在中断函数中使用!
另外,中断函数本来就是为了处理紧急情况,在中断函数中延时是不太合理的。
中断函数中必须使用带FromISR后缀的API函数!
这一条和上一条其实是一个意思,实验中在中断函数中对信号量进行释放,使用的是xTaskResumeFromISR()函数,如果改成vTaskResume(),实测发现程序同样会卡死在这里。
中断的优先级不能设置的过高(对应数字过小)!
按键中断的优先级设置:
NVIC_InitStructure.NVIC_IRQChannel = EXTI4_IRQn; //外部中断4
NVIC_InitStructure.NVIC_IRQChannelPreemptionPriority = 0x06;//抢占优先级6
NVIC_InitStructure.NVIC_IRQChannelSubPriority = 0x00; //子优先级0
NVIC_InitStructure.NVIC_IRQChannelCmd = ENABLE; //使能外部中断通道
NVIC_Init(&NVIC_InitStructure); //配置
第2行的抢占优先级为6是没有问题的,如果改成3,程序在进入按键中断会卡死在这里(port.c文件的末尾):
#if( configASSERT_DEFINED == 1 )
void vPortValidateInterruptPriority( void )
{
uint32_t ulCurrentInterrupt;
uint8_t ucCurrentPriority;
/* 获取当前正在执行的中断的数量。*/
ulCurrentInterrupt = vPortGetIPSR();
/* 中断号是用户定义的中断吗?*/
if( ulCurrentInterrupt >= portFIRST_USER_INTERRUPT_NUMBER )
{
/* 查找中断的优先级。*/
ucCurrentPriority = pcInterruptPriorityRegisters[ ulCurrentInterrupt ];
/* 如果一个被分配了高于configMAX_SYSCALL_INTERRUPT_PRIORITY优先级的中断的服务
例程(ISR)调用了一个ISR安全的FreeRTOS API函数,那么下面的断言将失败。
ISR安全FreeRTOS API函数必须*仅*被分配优先级在
configMAX_SYSCALL_INTERRUPT_PRIORITY或以下的中断调用。
数字上较低的中断优先级数在逻辑上代表较高的中断优先级,因此中断的优先级必须设置为
等于或数字上*高于* configMAX_SYSCALL_INTERRUPT_PRIORITY。
使用FreeRTOS API的中断不能保留其缺省优先级为零,因为这是可能的最高优先级,它保证
高于configMAX_SYSCALL_INTERRUPT_PRIORITY,因此也保证无效。
FreeRTOS维护单独的线程和ISR API函数,以确保中断条目尽可能快速和简单。
以下链接提供详细资料:
http://www.freertos.org/RTOS-Cortex-M3-M4.html
http://www.freertos.org/FAQHelp.html */
configASSERT( ucCurrentPriority >= ucMaxSysCallPriority );
}
/* 优先级分组:中断控制器(NVIC)允许定义每个中断优先级的比特被分割成定义中断的优先级比特和
定义中断的次优先级比特。为简单起见,必须将所有位定义为抢占优先位。
如果不是这样(如果某些位表示次优先级),下面的断言将失败。
如果应用程序只使用CMSIS库进行中断配置,那么在启动调度程序之前,通过调用NVIC_SetPriorityGrouping(0);
可以在所有Cortex-M设备上实现正确的设置。但是请注意,一些特定于供应商的外设库假设了非零优先级组设置,
在这种情况下,使用值为0将导致不可预测的行为。 */
configASSERT( ( portAIRCR_REG & portPRIORITY_GROUP_MASK ) <= ulMaxPRIGROUPValue );
}
#endif /* configASSERT_DEFINED */
注意里面的几段:
中断优先级级别
如果一个被分配了高于configMAX_SYSCALL_INTERRUPT_PRIORITY优先级的中断的服务例程(ISR)调用了一个ISR安全的FreeRTOS API函数,那么下面的断言将失败。ISR安全FreeRTOS API函数必须仅被分配优先级在configMAX_SYSCALL_INTERRUPT_PRIORITY或以下的中断调用。
这句的意思是,如果在中断函数中使用了FreeRTOS的API函数,当然前提也是使用带FromISR后缀的,中断的优先级不能高于宏定义configMAX_SYSCALL_INTERRUPT_PRIORITY,这个宏定义在FreeRTOSConfig.h中:
/* Cortex-M specific definitions. */
#ifdef __NVIC_PRIO_BITS
/* __BVIC_PRIO_BITS will be specified when CMSIS is being used. */
#define configPRIO_BITS __NVIC_PRIO_BITS
#else
#define configPRIO_BITS 4 /* 15 priority levels */
#endif
/* 在调用“设置优先级”函数时可以使用的最低中断优先级 */
#define configLIBRARY_LOWEST_INTERRUPT_PRIORITY 0xf
/* 可以被任何中断服务程序使用的最高中断优先级,它可以调用来中断安全的FreeRTOS API函数。
不要从任何比这个优先级更高的中断调用中断安全的FREERTOS API函数!(优先级越高,数值越低)*/
#define configLIBRARY_MAX_SYSCALL_INTERRUPT_PRIORITY 5
/* 内核端口层本身使用的中断优先级。这些对所有Cortex-M端口都是通用的,并且不依赖于任何特定的库函数。*/
#define configKERNEL_INTERRUPT_PRIORITY ( configLIBRARY_LOWEST_INTERRUPT_PRIORITY << (8 - configPRIO_BITS) )
/* !!!! configMAX_SYSCALL_INTERRUPT_PRIORITY 不能设置为零 !!!!
See http://www.FreeRTOS.org/RTOS-Cortex-M3-M4.html. */
#define configMAX_SYSCALL_INTERRUPT_PRIORITY ( configLIBRARY_MAX_SYSCALL_INTERRUPT_PRIORITY << (8 - configPRIO_BITS) )
即中断优先级设置范围为5~15(0xf)。
当然,如果中断函数中没有使用FreeRTOS的API,那么中断的优先级就不受限制。
中断优先级分组
优先级分组:中断控制器(NVIC)允许定义每个中断优先级的比特被分割成定义中断的优先级比特和定义中断的次优先级比特。为简单起见,必须将所有位定义为抢占优先位。如果不是这样(如果某些位表示次优先级),下面的断言将失败。
如果应用程序只使用CMSIS库进行中断配置,那么在启动调度程序之前,通过调用NVIC_SetPriorityGrouping(0);可以在所有Cortex-M设备上实现正确的设置。但是请注意,一些特定于供应商的外设库假设了非零优先级组设置,在这种情况下,使用值为0将导致不可预测的行为。
这两段意思是在说优先级分组的事,即所有位都是抢占优先级,没有次优先级,即中断分组模式4,也就是在主函数设置的:
NVIC_PriorityGroupConfig(NVIC_PriorityGroup_4);
1.
如果换成其它的,比如NVIC_PriorityGroup_3,程序进入中断后也会卡死在。
完整工程代码已保存至GitHub: https://github.com/xxpcb/FreeRTOS-STM32F407-examples
相关文章:

FreeRTOS例程2-任务挂起恢复与使用中断遇到的坑!
任务挂起简单点理解就是现在不需要执行这个任务,让它先暂停,就是挂起。恢复就是从刚才挂起的状态下继续运行。 API函数 任务挂起vTaskSuspend() 函数原型(tasks.c中): void vTaskSuspend( TaskHandle_t xTaskToSuspend ) 1. 参数: xTaskTo…...

L23.【LeetCode笔记】验证回文串(剖析几种解法)
目录 1.题目 2.自解 提交结果 反思 大小写之间的位运算 提交结果 3.代码优化 提交结果 编辑 4.LeetCode网友提供的解法 1.题目 https://leetcode.cn/problems/XltzEq/description/ 给定一个字符串 s ,验证 s 是否是 回文串 ,只考虑字母和数…...

FPGA 17 ,FPGA 与 SR-IOV虚拟化技术,高性能计算与虚拟化技术的结合(FPGA 与 SR-IOV 和 PCI,高性能计算与虚拟化的完美融合)
目录 前言 一. SR-IOV 的起源与发展 1. SR-IOV 的起源与时间线 2. SR-IOV 的诞生原因 3. SR-IOV 的详细介绍 二. SR-IOV 和 PCI 之间的关系 三. PCI 的起源与演进 1. PCI 的起源与时间线 2. PCI 的关键特性 四. FPGA 的独特魅力 1. FPGA 的定义与特性 2. FPGA 的内…...

解决navicat 导出excel数字为科学计数法问题
一、原因分析 用程序导出的csv文件,当字段中有比较长的数字字段存在时,在用excel软件查看csv文件时就会变成科学技术法的表现形式。 其实这个问题跟用什么语言导出csv文件没有关系。Excel显示数字时,如果数字大于12位,它会自动转化…...

[Unity] AppLovin Max接入Native 广告 Android篇
把下载下来的maxnativelibrary-release-文件放在Plugins/Android下 将这一行加入到mainTemplate.gradle文件中 implementation androidx.constraintlayout:constraintlayout:2.1.4添加下面的两个脚本 using System; using System.Collections; using System.Collections.Gener…...

Source Insight 4.0的安装
一、安装与破解 1、下载Source Insight 4.0安装包 https://pan.baidu.com/s/1t0u1RM19am0lyzhlNTqK9Q?pwdnvmk 2、下载程序破解补丁包 https://pan.baidu.com/s/1irvH-Kfwjf4zCCtWJByqJQ 其中包含文件si4.pediy.lic 和 sourceinsight4.exe。 3、安装下载的Source Insight …...

远程调试软件对比与使用推荐
远程调试软件对比与使用推荐 远程调试是现代软件开发中不可或缺的一部分,尤其是在处理分布式系统、云端服务或远程服务器上的问题时。以下是对几种常见远程调试工具的详细对比和推荐使用场景。 1. GDB (GNU Debugger) 特点 开源:完全免费且开源&…...
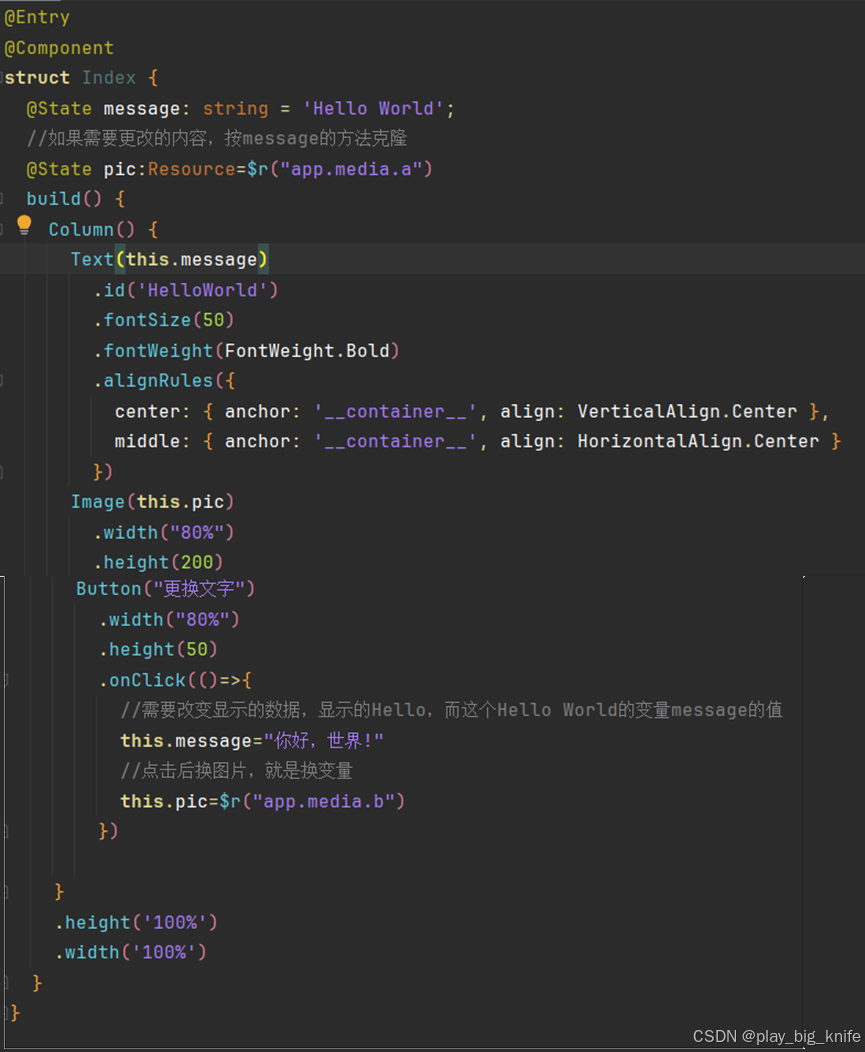
鸿蒙项目云捐助第二讲鸿蒙图文互动基本程序实现
鸿蒙项目云捐助第二讲鸿蒙图文互动基本程序实现 结合第一讲建立的“Hello World”程序,得到如下图所示的界面。 这里的“Hello World”是通过“Priview”显示出来的。在这个界面中进行开发的前奏曲,可以通过点击更换图片的案例来体会一下鸿蒙Next的开发…...

求解球面的一组正交标架
目录 求解球面的一组正交标架 求解球面的一组正交标架 球面 r ( u , v ) ( a cos u cos v , a cos u sin v , a sin u ) \mathbf{r}(u,v)\left(a\cos u\cos v,a\cos u\sin v,a\sin u\right) r(u,v)(acosucosv,acosusinv,asinu), 求得 r u ( − a sin u c…...

php.ini 文件上传/执行时间/部分配置新手教程
1、上传文件大小配置 一般需要同时配置“upload_max_filesize”、“post_max_size”,配置格式如下: file_uploads On ;是否允许HTTP文件上传 upload_max_filesize 2M ;设置单个文件上传的最大尺寸 post_max_size 8M ;设置 POST 请求体的最大尺寸&am…...

【Leetcode Top 100】102. 二叉树的层序遍历
问题背景 给你二叉树的根节点 r o o t root root,返回其节点值的 层序遍历 。 (即逐层地,从左到右访问所有节点)。 数据约束 树中节点数目在范围 [ 0 , 2000 ] [0, 2000] [0,2000] 内 − 1000 ≤ N o d e . v a l ≤ 1000 -1…...

【C++笔记】AVL树
前言 各位读者朋友们大家好,上期我们讲解了map和set这两大容器的使用,这一期我们讲解最早的平衡二叉搜索树——AVL树。 目录 前言一. AVL树的概念二. AVL树的实现2.1 AVL树的结构2.2 AVL树的插入2.2.1 AVL树插入一个值的大致过程2.2.2 平衡因子的更新2…...

【竞技宝】LOL:JDG官宣yagao离队
北京时间2024年12月13日,在英雄联盟S14全球总决赛结束之后,各大赛区都已经进入了休赛期,目前休赛期也快进入尾声,LPL大部分队伍都开始陆续官宣转会期的动向,其中JDG就在近期正式官宣中单选手yagao离队,而后者大概率将直接选择退役。 近日,JDG战队在官方微博上连续发布阵容变动消…...

双目摄像头标定方法
打开matlab 找到这个标定 将双目左右目拍的图像上传(左右目最好不少于20张) 等待即可 此时已经完成标定,左下角为反投影误差,右边为外参可视化 把这些误差大的删除即可。 点击导出 此时回到主页面,即可看到成功导出 Ca…...

相差不超过k的最多数,最长公共子序列(一),排序子序列,体操队形,青蛙过河
相差不超过k的最多数 链接:相差不超过k的最多数 来源:牛客网 题目描述: 给定一个数组,选择一些数,要求选择的数中任意两数差的绝对值不超过 𝑘 。问最多能选择多少个数? 输入描述: 第一行输入两个正整…...
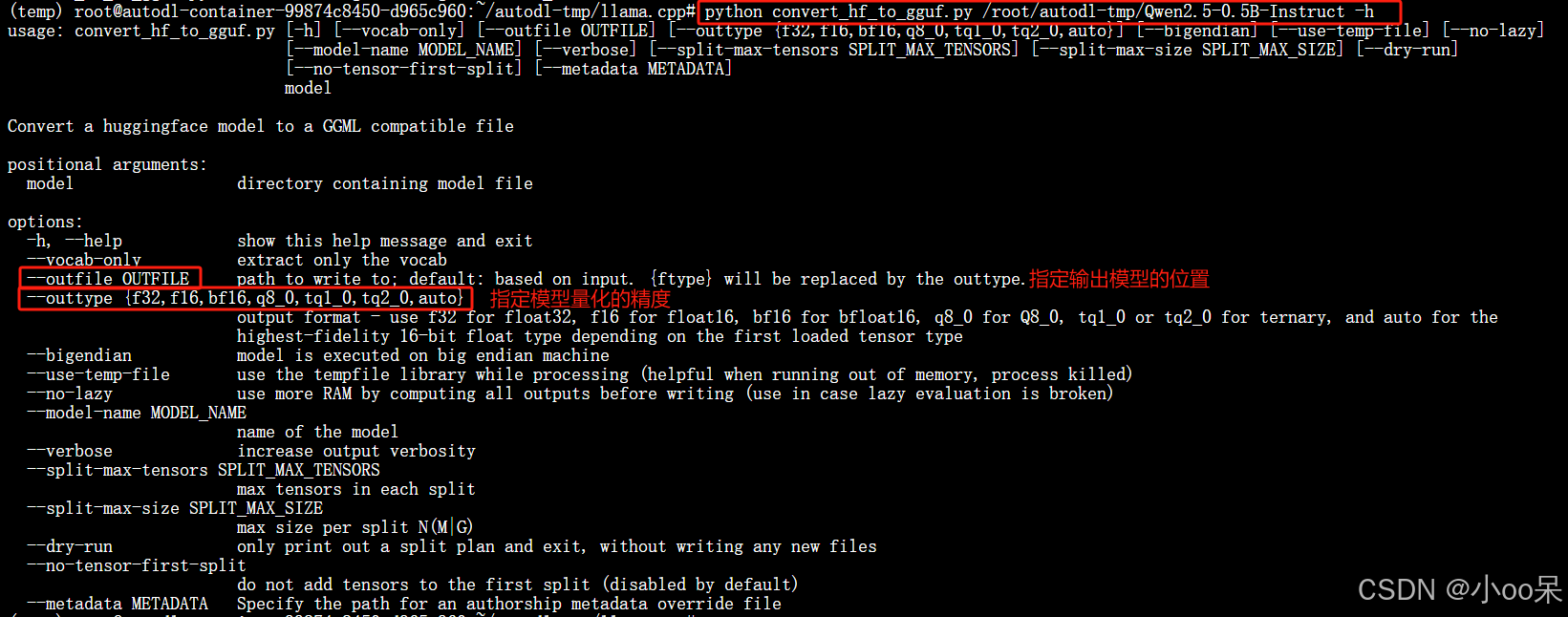
【自然语言处理与大模型】使用llama.cpp将HF格式大模型转换为GGUF格式
llama.cpp的主要目标是在本地和云端的各种硬件上以最小的设置和最先进的性能实现LLM推理。是一个专为大型语言模型(LLM)设计的高性能推理框架,完全使用C和C编写,没有外部依赖,这使得它可以很容易地被移植到不同的操作系…...

MongoDB存储照片和文件存储照片的区别在那里?
一、维度对比 比较维度MongoDB存储照片文件系统存储照片数据模型使用文档存储数据,可以存储不同结构的照片。以文件的形式存储照片,每个文件独立存在。性能高效的数据检索,适用于大规模应用程序中的高效检索和访问。但在处理大量高分辨率图片…...

协变量的概念
协变量的概念 协变量的概念 协变量(Covariate)是在统计分析和研究中,与因变量(被研究的主要变量)相关,并且可能对因变量产生影响的其他变量。它不是研究的主要关注对象,但需要在分析过程中被考虑进去,因为它可能会混淆或改变自变量与因变量之间的关系。举例说明 教育研…...

【[LeetCode每日一题】Leetcode 1768.交替合并字符串
Leetcode 1768.交替合并字符串 题目描述: 给定两个字符串 word1 和 word2,以交替的方式将它们合并成一个新的字符串。即,第一个字符来自 word1,第二个字符来自 word2,第三个字符来自 word1,依此类推。如果…...

SRT协议学习
SRT(Secure Reliable Transport)协议是一种开源的视频传输协议,旨在提供安全,可靠,低延迟的视频流传输。以下是SRT协议的一些关键的工作原理。 1 安全传输,SRT通过使用AES加密和数据完整性验证来确保数据的安全传输。它可以在不信…...
)
MIMIC-CXR数据集加载实战:用Python从零处理医学影像与报告文本(附完整代码)
MIMIC-CXR数据集加载实战:用Python从零处理医学影像与报告文本(附完整代码)当你第一次打开MIMIC-CXR数据集时,那种面对海量嵌套目录和元数据的茫然感我深有体会。作为医学AI领域最具挑战性的公开数据集之一,MIMIC-CXR包…...

前端实习面试手写题分享
在寻找前端实习的过程中,我们会发现,面试除了考察算法题之外,手写题同样也是高频考点。尤其是在准备中大厂前端面试时,手写能力几乎是必不可少的一部分。这篇文章将围绕几道经典高频手写题展开,包括手写深拷贝、实现寄…...

软考软件设计师·考前6天·最后冲刺全攻略
📝 软考软件设计师考前6天最后冲刺全攻略📅 2026年5月17日 | 距考试 6 天 | 2026上半年软考时间:5月23-26日一、🔥 2025年最新真题考情深度分析 根据2025年上下半年真题回忆版,以下是最新出题趋势与分值分布࿱…...

瑞数6代JSVMP对抗实战:Node.js环境补全与412绕过
1. 这不是“绕过验证码”,而是一场Web前端对抗的深度解剖瑞数6代,业内常被称作“JSVMP黑盒”的典型代表——它不靠传统混淆堆砌代码体积,也不依赖简单的时间戳或行为采集做判断,而是把整个校验逻辑编译进一套自定义的、高度定制化…...

FlashAttention的水印攻击:怎么知道你的模型被偷用或篡改了?
之前有个公司发现,他们的Llama-2-7B模型被人克隆了一份,部署在了另一个云服务上。巧的是,那个克隆模型的输出跟他们的一模一样——连生成风格都一样。 他们去查代码,发现对方的代码里也用了npu_flash_attention。他们想知道&…...

基于首届中国互联网数据挖掘竞赛数据集的行为相似网络分析
在互联网行为分析中,“社交网络分析”不一定只能依赖好友、关注、私信或转发关系。很多时候,数据里并没有显式的社交边,但用户的网页访问、应用使用、停留时长和活跃节奏,本身就能反映出相似的兴趣圈层。 本项目中的“社交网络分析…...

智慧农业棉花棉铃病害成熟度识别分割数据集labelme格式969张6类别
数据集格式:labelme格式(不包含mask文件,仅仅包含jpg图片和对应的json文件)图片数量(jpg文件个数):969标注数量(json文件个数):969标注类别数:6标注类别名称:["jiankangmianling","qingdubinghai"…...

2026实测:宁波初一数学小升初本土品牌深度拆解
在宁波,几乎每一位小升初、中考、高考的家长都绕不开一个共同情绪——焦虑。镇海、海曙、鄞州等教育强区的竞争热度连年不减,优质初中与重点高中的入学门槛水涨船高,而面对纷至沓来的教培选择,家长们却常常陷入两难:全…...
的职业规划是什么呢?)
30岁之后IT人士(程序员)的职业规划是什么呢?
前段也看到ibm的寇卫东的一篇文章关于职业规划的,现在看看,这些职业规划都是理想状态下的产物,很多时候,限于我们自身水平、时间、空间的影响,很多是看着很美,其实却远远的达不到,不能仅仅说让人…...

Python简单算法题
1.字符串中的第一个唯一字符def first_uniq_char(s: str) -> int:from collections import Countercount Counter(s)for i, ch in enumerate(s):if count[ch] 1:return ireturn -12. 合并两个有序数组(双指针,in-place)题目:…...