STM32单片机使用CAN协议进行通信
CAN总线(控制器局域网总线)
理论知识
CAN总线是由BOSCH公司开发的一种简洁易用、传输速度快、易扩展、可靠性高的串行通信总线
CAN总线特征
- 两根通信线(CAN_H、CAN_L),线路少,无需共地
- 差分信号通信(相对的是单端信号),抗干扰能力强(意思是当有干扰时,两根线同时产生波动,但两根线的差值不变)
- 高速CAN(ISO11898):125k~1Mbps,<40m
- 低速CAN(ISO11519):10k~12kbps,<1km
- 异步,无需时钟线,通信速率由设备各自约定
- 半双工,可挂载多设备,多设备同时发送数据时通过仲裁判断先后顺序
- 11位/29位报文ID,用于区分消息功能,同时决定优先级
- 可配置1~8字节的有效载荷
- 可实现广播式和请求式两种传输方式
- 应答、CRC校验、位填充、位同步、错误处理等特性
| 名称 | 引脚 | 双工 | 时钟 | 电平 | 设备 | 应用场景 |
| UART | TX、RX | 全双工 | 异步 | 单端 | 点对点 | 两个设备互相通信 |
| I2C | SCL、SDA | 半双工 | 同步 | 单端 | 多设备 | 单主控外挂多个模块 |
| SPI | SCK、MOSI、MISO、SS | 全双 | 同步 | 单端 | 多设备 | 单模块外挂多个模块(高速,可达几Mbps) |
| CAN | CAN_H、CAN_L | 半双工 | 异步 | 差分 | 多设备 | 多个主控互相通信 |
CAN硬件电路
- 每个设备通过CAN收发器挂载在CAN总线网络上
- 高速CAN使用闭环网络,CAN_H和CAN_L两端添加120欧的终端电阻(第一个作用是防止回波反射,第二个作用是没有设备操作时,将两根差分线的电压收紧)
- 低速CAN使用开环网络,CAN_H和CAN_L其中一端添加2.2千欧的终端网络(有回波反射作用)
CAN电平标准
- CAN总线采用差分信号,即两线电压差(Vcan_h-Vcan_l)传输数据位
- 高速CAN规定:
电压差为0V时表示逻辑1(隐性电平)
电压差为2V时表示逻辑0(显性电平)
- 低速CAN规定:
电压差为-1.5V时表示逻辑1(隐性电平)
电压差为3V时表示逻辑0(显性电平)

CAN总线帧格式
| 帧类型 | 用途 |
| 数据帧 | 发送设备主动发送数据(广播式) |
| 遥控帧 | 接收设备主动请求数据(请求式) |
| 错误帧 | 某个设备检测出错误时向其他设备通知错误 |
| 过载帧 | 接收设备通知其尚未做好接收准备 |
| 帧间隔 | 用于将数据帧及遥控帧与前面的帧分离开 |
数据帧

总线空闲状态-->帧起始SOF(发送隐性电平1)-->仲裁段(发送11位报文ID以及RTR【隐性电平1表示数据帧,显性电平0表示遥控帧】)-->控制段(IDE:ID扩展标志位:用于区分标准格式还是扩展格式【标准格式发显性电平0,扩展格式发隐性电平1】)、r0(保留位,必须为显性电平0)、4位DLC(用于指定1~8位有效载荷)-->数据段(要发送的数据,大小与前面的DLC对应)-->CRC段(校验算法:CRC及CRC界定符)-->ACK段(收发应答:ACK槽及ACK界定符)-->帧结束(EOF)
扩展格式:SRR替代RTR,协议升级时留下的无意义位
应答的过程是发送方与接收方操纵总线的过程,发送方发完数据后释放总线,等待读取总线信息,如果读到总线被拉紧,就说明有其他设备接收到数据,并且,CAN设备是发送方发送一位,接收方接收一位的过程,两个界定符的作用是给发送方和接收方留出操纵总线的时间。
遥控帧
遥控帧无数据段,RTR为隐性电平1,其他部分与数据帧相同

CAN的遥控帧(Remote Frame)的主要作用是请求其他节点发送具有特定ID的数据帧。具体来说,当一个节点需要从另一个节点获取数据时,它可以发送一个遥控帧,而不是直接发送数据。这个遥控帧包含了请求数据的ID,但没有包含数据本身。接收到遥控帧的节点如果拥有与遥控帧ID相匹配的数据帧,就会响应并发送相应的数据帧。这种方式允许节点仅请求需要的数据,而不是不断发送可能不需要的数据,从而提高了网络的效率和减少了不必要的数据传输。
位填充
位填充规则:发送方每发送5个相同电平后,自动追加一个相反电平的填充位接收方检测到填充位时,会自动移除填充位,恢复原始数据。
位填充作用:
- 增加波形的定时信息,利于接收方执行“再同步”,防止波形长时间无变化,导致接收方不能精确掌握数据采样时机
- 将正常数据流与“错误帧”和“过载帧”区分开,标志“错误帧”和“过载帧”的特异性(错误帧和过载帧回发送6个相同电平)
- 保持CAN总线早发送正常数据流时的活跃状态,防止被误认为总线空闲
位时序
为了灵活调整每个采样点的位置,使采样点对齐数据中心附近,CAN总线对每一个数据位的时长进行了更细的划分,分为同步段(SS)、传播时间段(PTS)、相对缓冲段1(PBS1)和相位缓冲段2(PBS2),每个段又由若干个最小时间单位(Tq)构成

硬同步
- 每个设备都有一个位时序计时周期,当每个设备(发送方)率先发送报文,其他所有设备(接收方)收到SOF的下降沿时,接收方会将自己的位时序计时周期拨到SS段的位置,与发送方的位时序计时周期保持同步
- 硬同步只在帧的第一个下降沿(SOF下降沿)有效
- 经过硬同步后,若发送方和接收方的时钟没有误差,则后续所有数据位的采样点必须都会对齐数据位中心附近
再同步
- 若发送方或接收方的时钟有误差,随着误差积累,数据位边沿逐渐偏离SS段,则此时接收方根据再同步补偿宽度值(SJW)通过加长PBS1段,或缩短PBS2段,以调整同步
- 再同步可以发生在第一个下降沿之后的每个数据位跳变边沿
总线仲裁
CAN基本结构

STM32有CAN外设,微控制器做为CAN控制器,其内部结构如上图所示,发送和接收控制器相当于管家,控制CAN的发送和接收,发送邮箱是发送缓冲区,发送接收控制器可以根据先来后到或者ID优先级两种方式进行选择发送报文,通过CAN_TX发送到外面的CAN收发器,CAN收发器将TTL电平转换为差分电平CAN_H和CAN_L,传输到CAN总线上,发送接收控制器从CAN_RX引脚接收CAN总线发来的数据电平,先经过14个过滤器筛选,通过过滤器的报文再存放到接收FIFO(先入先出寄存器,队列)中,等待CPU读取处理。
代码
标准格式、扩展格式、数据帧、遥控帧
MyCAN.h
#ifndef __MYCAN_H
#define __MYCAN_H
#include "stdint.h"void MyCAN_Init(void);
void MyCAN_Transmit(CanTxMsg *TxMessage);
uint8_t MyCAN_ReceiveFlag(void);
void MyCAN_Receive(CanRxMsg *RxMessage);#endif
MyCAN.c
#include "stm32f10x.h" // Device headervoid MyCAN_Init(void)
{RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOA,ENABLE);RCC_APB1PeriphClockCmd(RCC_APB1Periph_CAN1,ENABLE);GPIO_InitTypeDef GPIO_InitStructure;GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF_PP;GPIO_InitStructure.GPIO_Pin = GPIO_Pin_12;GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;GPIO_Init(GPIOA,&GPIO_InitStructure);GPIO_InitStructure.GPIO_Mode = GPIO_Mode_IPU;GPIO_InitStructure.GPIO_Pin = GPIO_Pin_11;GPIO_Init(GPIOA,&GPIO_InitStructure);CAN_InitTypeDef CAN_InitStructure;CAN_InitStructure.CAN_Mode = CAN_Mode_Normal;//环回模式CAN_InitStructure.CAN_Prescaler = 48; //波特率 = 36M/48/(1+BS1Tq数+BS2Tq数)=125KCAN_InitStructure.CAN_BS1 = CAN_BS1_2tq;CAN_InitStructure.CAN_BS2 = CAN_BS2_3tq;CAN_InitStructure.CAN_SJW = CAN_SJW_2tq;CAN_InitStructure.CAN_NART = DISABLE; //自动重传CAN_InitStructure.CAN_TXFP = DISABLE; //发送邮箱优先级,ENABLE先请求先发送,DISABLE,ID号小的先发送CAN_InitStructure.CAN_RFLM = DISABLE; //FIFO锁定,ENABLE,FIFO溢出时,新报文丢弃,DISABLE,最后收到的报文被新报文覆盖CAN_InitStructure.CAN_AWUM = DISABLE; //自动唤醒,ENABLE,自动,DISABLE,手动CAN_InitStructure.CAN_TTCM = DISABLE; //时间触发通信模式CAN_InitStructure.CAN_ABOM = DISABLE; //离线自动恢复,ENABLE自动恢复,DISABLE手动恢复CAN_Init(CAN1,&CAN_InitStructure);CAN_FilterInitTypeDef CAN_FilterInitStructure;CAN_FilterInitStructure.CAN_FilterNumber = 0;CAN_FilterInitStructure.CAN_FilterIdHigh = 0x0000;CAN_FilterInitStructure.CAN_FilterIdLow = 0x0000;CAN_FilterInitStructure.CAN_FilterMaskIdHigh = 0x0000;CAN_FilterInitStructure.CAN_FilterMaskIdLow = 0x0000; //全通模式CAN_FilterInitStructure.CAN_FilterScale = CAN_FilterScale_32bit; //过滤器位宽:32位CAN_FilterInitStructure.CAN_FilterMode = CAN_FilterMode_IdMask; //过滤器模式:屏蔽模式CAN_FilterInitStructure.CAN_FilterFIFOAssignment = CAN_Filter_FIFO0; //配置过滤器关联,进FIFO0排队还是进FIFO1排队CAN_FilterInitStructure.CAN_FilterActivation = ENABLE; //激活过滤器开关CAN_FilterInit(&CAN_FilterInitStructure);
}void MyCAN_Transmit(CanTxMsg *TxMessage)
{uint8_t TransmitMailbox = CAN_Transmit(CAN1,TxMessage);uint32_t Timeout = 0;while(CAN_TransmitStatus(CAN1,TransmitMailbox)!=CAN_TxStatus_Ok) //超时退出{Timeout ++;if(Timeout > 100000)break;}
}uint8_t MyCAN_ReceiveFlag(void)
{if(CAN_MessagePending(CAN1,CAN_FIFO0)>0) //检查FIFO里是否有报文{return 1;}return 0;
}void MyCAN_Receive(CanRxMsg *RxMessage)
{CAN_Receive(CAN1,CAN_FIFO0,RxMessage);
}
main.c
#include "stm32f10x.h" // Device header
#include "Delay.h"
#include "OLED.h"
#include "MyCAN.h"
#include "Key.h"CanTxMsg TxMsgArray[] = {
/* StdId ExtId IDE RTR DLC Data[8] */{0x555,0x00000000,CAN_Id_Standard,CAN_RTR_Data,4,{0x11,0x22,0x33,0x44}},{0x000,0x12345678,CAN_Id_Extended,CAN_RTR_Data,4,{0xAA,0xBB,0xCC,0xDD}},{0x666,0x00000000,CAN_Id_Standard,CAN_RTR_Remote,0,{0x00,0x00,0x00,0x00}},{0x000,0x0789ABCD,CAN_Id_Extended,CAN_RTR_Remote,4,{0x00,0x00,0x00,0x00}},
};CanRxMsg RxMsg;u8 pTMsgArray = 0;int main()
{u8 keyNum = 0;OLED_Init();MyCAN_Init();Key_Init();OLED_ShowString(1,1,"Rx :");OLED_ShowString(2,1,"RxID:");OLED_ShowString(3,1,"Leng:");OLED_ShowString(4,1,"Data:");while(1){keyNum = Key_GetNum();if(keyNum==1){ MyCAN_Transmit(&TxMsgArray[pTMsgArray]);pTMsgArray++;pTMsgArray%=sizeof(TxMsgArray)/sizeof(CanTxMsg);}if(MyCAN_ReceiveFlag()){MyCAN_Receive(&RxMsg);if(RxMsg.IDE == CAN_Id_Standard){OLED_ShowString(1,6,"Std");OLED_ShowHexNum(2,6,RxMsg.StdId,8);}else if(RxMsg.IDE == CAN_Id_Extended){OLED_ShowString(1,6,"Ext");OLED_ShowHexNum(2,6,RxMsg.ExtId,8);}if(RxMsg.RTR == CAN_RTR_Data){OLED_ShowString(1,10,"Data ");OLED_ShowHexNum(3,6,RxMsg.DLC,1);OLED_ShowHexNum(4,6, RxMsg.Data[0],2);OLED_ShowHexNum(4,9, RxMsg.Data[1],2);OLED_ShowHexNum(4,12,RxMsg.Data[2],2);OLED_ShowHexNum(4,15,RxMsg.Data[3],2); }else if(RxMsg.RTR == CAN_RTR_Remote){OLED_ShowString(1,10,"Remote");OLED_ShowHexNum(3,6,RxMsg.DLC,1);OLED_ShowHexNum(4,6, 0x00,2);OLED_ShowHexNum(4,9, 0x00,2);OLED_ShowHexNum(4,12,0x00,2);OLED_ShowHexNum(4,15,0x00,2); }}}
}
过滤器的使用

(1)16位列表模式
/*一共有14个过滤器,可配置多个*/CAN_FilterInitStructure.CAN_FilterNumber = 0;
// CAN_FilterInitStructure.CAN_FilterIdHigh = (0x234<<5)|0x10; //RTR在第五位,|0x10就能接收遥控帧CAN_FilterInitStructure.CAN_FilterIdHigh = 0x234<<5;CAN_FilterInitStructure.CAN_FilterIdLow = 0x345<<5;CAN_FilterInitStructure.CAN_FilterMaskIdHigh = 0x567<<5;CAN_FilterInitStructure.CAN_FilterMaskIdLow = 0x000<<5; CAN_FilterInitStructure.CAN_FilterScale = CAN_FilterScale_16bit; //过滤器位宽:16位CAN_FilterInitStructure.CAN_FilterMode = CAN_FilterMode_IdList; //过滤器模式:列表CAN_FilterInitStructure.CAN_FilterFIFOAssignment = CAN_Filter_FIFO0; //配置过滤器关联,进FIFO0排队还是进FIFO1排队CAN_FilterInitStructure.CAN_FilterActivation = ENABLE; //激活过滤器开关CAN_FilterInit(&CAN_FilterInitStructure);CAN_FilterInitStructure.CAN_FilterNumber = 1;CAN_FilterInitStructure.CAN_FilterIdHigh = 0x123<<5;CAN_FilterInitStructure.CAN_FilterIdLow = 0x678<<5;CAN_FilterInitStructure.CAN_FilterMaskIdHigh = 0x000<<5;CAN_FilterInitStructure.CAN_FilterMaskIdLow = 0x000<<5; CAN_FilterInitStructure.CAN_FilterScale = CAN_FilterScale_16bit; CAN_FilterInitStructure.CAN_FilterMode = CAN_FilterMode_IdList; CAN_FilterInitStructure.CAN_FilterFIFOAssignment = CAN_Filter_FIFO0; //配置过滤器关联,进FIFO0排队还是进FIFO1排队CAN_FilterInitStructure.CAN_FilterActivation = ENABLE; //激活过滤器开关CAN_FilterInit(&CAN_FilterInitStructure);(2)16屏蔽模式
CAN_FilterInitTypeDef CAN_FilterInitStructure;/*一共有14个过滤器,可配置多个*/CAN_FilterInitStructure.CAN_FilterNumber = 0;CAN_FilterInitStructure.CAN_FilterIdHigh = 0x200<<5; //第一组IDCAN_FilterInitStructure.CAN_FilterMaskIdHigh = (0x700<<5)|0x10|0x8; //对应的屏蔽位CAN_FilterInitStructure.CAN_FilterIdLow = 0x320<<5; //第二组IDCAN_FilterInitStructure.CAN_FilterMaskIdLow = (0x7F0<<5)|0x10|0x8; //对应的屏蔽位CAN_FilterInitStructure.CAN_FilterScale = CAN_FilterScale_16bit; //过滤器位宽:16位CAN_FilterInitStructure.CAN_FilterMode = CAN_FilterMode_IdMask; //过滤器模式:屏蔽CAN_FilterInitStructure.CAN_FilterFIFOAssignment = CAN_Filter_FIFO0; //配置过滤器关联,进FIFO0排队还是进FIFO1排队CAN_FilterInitStructure.CAN_FilterActivation = ENABLE; //激活过滤器开关CAN_FilterInit(&CAN_FilterInitStructure);(3)32位列表模式
/*一共有14个过滤器,可配置多个*/CAN_FilterInitStructure.CAN_FilterNumber = 0;uint32_t ID1 = 0x123<<21;CAN_FilterInitStructure.CAN_FilterIdHigh = ID1>>16;CAN_FilterInitStructure.CAN_FilterIdLow =ID1;uint32_t ID2 = (0x12345678u<<3)|0x4;CAN_FilterInitStructure.CAN_FilterMaskIdHigh = ID2>>16;CAN_FilterInitStructure.CAN_FilterMaskIdLow = ID2; CAN_FilterInitStructure.CAN_FilterScale = CAN_FilterScale_32bit; //过滤器位宽:16位CAN_FilterInitStructure.CAN_FilterMode = CAN_FilterMode_IdList; //过滤器模式:列表CAN_FilterInitStructure.CAN_FilterFIFOAssignment = CAN_Filter_FIFO0; //配置过滤器关联,进FIFO0排队还是进FIFO1排队CAN_FilterInitStructure.CAN_FilterActivation = ENABLE; //激活过滤器开关CAN_FilterInit(&CAN_FilterInitStructure);(4)32位屏蔽模式
/*一共有14个过滤器,可配置多个*/CAN_FilterInitStructure.CAN_FilterNumber = 0;uint32_t ID = (0x12345600u<<3)|0x4;CAN_FilterInitStructure.CAN_FilterIdHigh = ID>>16;CAN_FilterInitStructure.CAN_FilterIdLow =ID;uint32_t Mask = (0x1FFFFF00u<<3)|0x4|0x2;CAN_FilterInitStructure.CAN_FilterMaskIdHigh = Mask>>16;CAN_FilterInitStructure.CAN_FilterMaskIdLow = Mask; CAN_FilterInitStructure.CAN_FilterScale = CAN_FilterScale_32bit; //过滤器位宽:16位CAN_FilterInitStructure.CAN_FilterMode = CAN_FilterMode_IdMask; //过滤器模式:列表CAN_FilterInitStructure.CAN_FilterFIFOAssignment = CAN_Filter_FIFO0; //配置过滤器关联,进FIFO0排队还是进FIFO1排队CAN_FilterInitStructure.CAN_FilterActivation = ENABLE; //激活过滤器开关CAN_FilterInit(&CAN_FilterInitStructure);(5)只接收遥控帧
/*一共有14个过滤器,可配置多个*/CAN_FilterInitStructure.CAN_FilterNumber = 0;uint32_t ID = 0x2;CAN_FilterInitStructure.CAN_FilterIdHigh = ID>>16;CAN_FilterInitStructure.CAN_FilterIdLow =ID;uint32_t Mask = 0x2;CAN_FilterInitStructure.CAN_FilterMaskIdHigh = Mask>>16;CAN_FilterInitStructure.CAN_FilterMaskIdLow = Mask; CAN_FilterInitStructure.CAN_FilterScale = CAN_FilterScale_32bit; //过滤器位宽:16位CAN_FilterInitStructure.CAN_FilterMode = CAN_FilterMode_IdMask; //过滤器模式:列表CAN_FilterInitStructure.CAN_FilterFIFOAssignment = CAN_Filter_FIFO0; //配置过滤器关联,进FIFO0排队还是进FIFO1排队CAN_FilterInitStructure.CAN_FilterActivation = ENABLE; //激活过滤器开关CAN_FilterInit(&CAN_FilterInitStructure);相关文章:
STM32单片机使用CAN协议进行通信
CAN总线(控制器局域网总线) 理论知识 CAN总线是由BOSCH公司开发的一种简洁易用、传输速度快、易扩展、可靠性高的串行通信总线 CAN总线特征 两根通信线(CAN_H、CAN_L),线路少,无需共地差分信号通信&…...

Docker 入门:如何使用 Docker 容器化 AI 项目(二)
四、将 AI 项目容器化:示例实践 - 完整的图像分类与 API 服务 让我们通过一个更完整的 AI 项目示例,展示如何将 AI 项目容器化。我们以一个基于 TensorFlow 的图像分类模型为例,演示如何将训练、推理、以及 API 服务过程容器化。 4.1 创建 …...

MVVM、MVC、MVP 的区别
MVVM(Model-View-ViewModel)、MVC(Model-View-Controller)和MVP(Model-View-Presenter)是三种常见的软件架构模式,它们在客户端应用开发中被广泛使用。每种模式都有其特定的设计理念和应用场景&…...

【Verilog】期末复习
数字逻辑电路分为哪两类?它们各自的特点是什么? 组合逻辑电路:任意时刻的输出仅仅取决于该时刻的输入,而与电路原来的状态无关 没有记忆功能,只有从输入到输出的通路,没有从输出到输入的回路 时序逻辑电路&…...

C#都可以找哪些工作?
在国内学习C#,可以找的工作主要是以下4个: 1、游戏开发 需要学习C#编程、Unity引擎操作、游戏设计和3D图形处理等。 2、PC桌面应用开发 需要学习C#编程、WinForm框架/WPF框架、MVVM设计模式和UI/UX设计等。 3、Web开发 需要学习C#编程、ASP.NET框架…...

机器学习Python使用scikit-learn工具包详细介绍
一、简介 Scikit-learn是一个开源的机器学习库,用于Python编程语言。它建立在NumPy、SciPy和matplotlib这些科学计算库之上,提供了简单有效的数据挖掘和数据分析工具。Scikit-learn库包含了许多用于分类、回归、聚类和降维的算法,包括支持向量…...

蓝桥杯真题 - 扫雷 - 题解
题目链接:https://www.lanqiao.cn/problems/549/learning/ 个人评价:难度 1 星(满星:5) 前置知识:无 整体思路 按题意模拟;为了减少不必要的“数组越界”判断,让数组下标从 1 1 1…...

vue3项目结合Echarts实现甘特图(可拖拽、选中等操作)
效果图: 图一:选中操作 图二:上下左右拖拽操作 本案例在echarts示例机场航班甘特图的基础上修改 封装ganttEcharts组件,测试数据 airport-schedule.jsonganttEcharts代码: 直接复制粘贴可测…...

Log4j2 插件的简单使用
代码: TestPlugin.java package com.chenjiacheng.webapp.plugins;import org.apache.logging.log4j.core.LogEvent; import org.apache.logging.log4j.core.config.plugins.Plugin; import org.apache.logging.log4j.core.lookup.StrLookup;/*** Created by chenjiacheng on …...

Linux之RPM和YUM命令
一、RPM命令 1、介绍 RPM(RedHat Package Manager).,RedHat软件包管理工具,类似windows里面的setup,exe是Liux这系列操作系统里而的打包安装工具。 RPMI包的名称格式: Apache-1.3.23-11.i386.rpm “apache’” 软件名称“1.3.23-11” 软件的版本号&am…...

读取硬件板子上的数据
SSCOM工具,先要安装一个插件 这样就可以读到设备数据...

Cesium 实例化潜入潜出
Cesium 实例化潜入潜出 1、WebGL Instance 的原理 狭义的的WebGL 中说使用 Instance, 一般指使用 glDrawArraysInstanced 用于实例化渲染的函数。它允许在一次绘制调用中渲染多个相同的几何体实例,而无需为每个实例发起单独的绘制调用。 Three.js 就是使用这种方…...
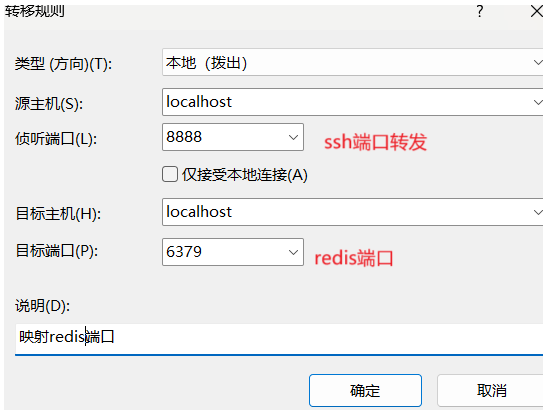
java引入jedis并且关于开放redis端口问题
博主主页: 码农派大星. 数据结构专栏:Java数据结构 数据库专栏:数据库 JavaEE专栏:JavaEE 软件测试专栏:软件测试 关注博主带你了解更多知识 目录 1. 引入jedis 编辑 2. 关于java客户端开放redis端口问题 3. 连接redis服务器 redis服务器在官网公开了使用的协议: resp…...

【人工智能】用Python实现情感分析:从简单词典到深度学习方法的演进
《Python OpenCV从菜鸟到高手》带你进入图像处理与计算机视觉的大门! 解锁Python编程的无限可能:《奇妙的Python》带你漫游代码世界 情感分析是自然语言处理(NLP)中的一个重要任务,其目的是通过分析文本内容,识别出其中的情感极性,如正面、负面或中性。随着技术的不断…...

关系型数据库的完整性和一致性
完整性 1.实体完整性 - 每一个实体都是独一无二的,没有冗余 --主键/唯一索引 2.参照完整性 - 外键 3.域完整性 - 存储的数据都是有效的数据 --数据类型/数据长度/非空约束/检查约束/ 检查约束: alter table tb_score add constraint ck_score_scmar…...

设计模式の命令访问者迭代器模式
文章目录 前言一、命令模式二、访问者模式三、迭代器模式 前言 本篇是关于设计模式中命令模式、访问者模式、以及迭代器模式的学习笔记。 一、命令模式 命令模式是一种行为型设计模式,其核心目的在于将命令的发送者和接受者解耦,提供一个中间层对命令进行…...

信息系统项目管理 -冲突管理
信息系统项目管理题 冲突管理: 项目管理信息系统包括()软件,用于监督资源的使用情况,协助确保合适的资源适时、适地的用于合适活动。 A资源管理或进度计划 BCRM系统 C采购系统或智能分析 DBOM系统 答案:A …...

Gmsh有限元网格剖分(Python)---点、直线、平面的移动
Gmsh有限元网格剖分(Python)—点、直线、平面的移动和旋转 最近在学习有限元的网格剖分算法,主要还是要参考老外的开源Gmsh库进行,写一些博客记录下学习过程,方便以后回忆嘞。 Gmsh的官方英文文档可以参考:gmsh.pdf 但咋就说&a…...

山景BP1048增加AT指令,实现单片机串口控制播放音乐(一)
1、设计目的 山景提供的SDK是蓝牙音箱demo,用户使用ADC按键或者IR遥控器,进行人机交互。然而现实很多场景,需要和单片机通信,不管是ADC按键或者IR接口都不适合和单片机通信。这里设计个AT指令用来和BP1048通信。AT指令如下图所示…...

SMMU软件指南SMMU编程之全局错误和最小配置
安全之安全(security)博客目录导读 目录 一、全局错误 二、最小配置 一、全局错误 与编程接口相关的全局错误会报告到适当的 SMMU_(*_)GERROR 寄存器,而不是通过基于内存的事件队列。这些错误通常是严重的,例如导致 SMMU 停止向前推进。例如…...

避坑指南:OpenBMI运动想象实验中的‘跨被试’与‘不跨被试’到底怎么选?
避坑指南:OpenBMI运动想象实验中的‘跨被试’与‘不跨被试’到底怎么选? 当你第一次接触OpenBMI工具箱进行运动想象(Motor Imagery, MI)实验时,最令人困惑的决策之一就是如何选择数据划分策略。是采用**跨被试…...

智能视频PPT提取:从动态内容到静态文档的高效转化方案
智能视频PPT提取:从动态内容到静态文档的高效转化方案 【免费下载链接】extract-video-ppt extract the ppt in the video 项目地址: https://gitcode.com/gh_mirrors/ex/extract-video-ppt 场景痛点:视频内容提取的三大核心挑战 如何从90分钟的…...
)
Windows下WVP+ZLMediaKit联动实战:5分钟搞定GB28181摄像头接入(附端口避坑清单)
Windows下WVPZLMediaKit联动实战:5分钟搞定GB28181摄像头接入(附端口避坑清单) 在智能视频监控领域,GB28181协议作为国家标准协议,正在成为设备互联的主流选择。但对于刚接触这一领域的开发者来说,从零开始…...

零基础如何用罗技鼠标宏实现绝地求生自动压枪?高效配置指南
零基础如何用罗技鼠标宏实现绝地求生自动压枪?高效配置指南 【免费下载链接】logitech-pubg PUBG no recoil script for Logitech gaming mouse / 绝地求生 罗技 鼠标宏 项目地址: https://gitcode.com/gh_mirrors/lo/logitech-pubg 你是否在《绝地求生》中因…...

Z-Image-Turbo问题解决:手把手教你配置Gradio WebUI并映射本地端口
Z-Image-Turbo问题解决:手把手教你配置Gradio WebUI并映射本地端口 1. 为什么选择Z-Image-Turbo 如果你正在寻找一款既快速又高质量的AI图像生成工具,Z-Image-Turbo绝对值得考虑。这个由阿里通义实验室开源的高效文生图模型,在速度和质量的…...
)
【仅限头部金融科技团队内部流通】FastAPI 2.0 AI流式响应安全加固方案:防内存溢出、防连接耗尽、防Token泄露(含OWASP ASVS v4.0合规对照表)
第一章:FastAPI 2.0 AI流式响应安全加固方案全景概览FastAPI 2.0 引入了对 Server-Sent Events(SSE)与异步生成器的原生增强支持,使大语言模型(LLM)的流式响应(如 token-by-token 输出ÿ…...
Pixel Couplet Gen实操手册:自定义门神像素图替换与SVG动画扩展方法
Pixel Couplet Gen实操手册:自定义门神像素图替换与SVG动画扩展方法 1. 项目概述 Pixel Couplet Gen是一款融合传统春节元素与现代像素艺术风格的AI春联生成工具。通过ModelScope大模型的文本生成能力,结合精心设计的8-bit视觉风格,为用户提…...

Apifox供应链投毒攻击--完整解析
🔴 安全应急通告:Apifox 桌面端供应链投毒与高危凭证窃取事件 一、 事件概述 近期监测到 Apifox 公网 SaaS 版桌面客户端遭遇严重的供应链投毒攻击。攻击者通过劫持合法的运行追踪模块,向用户下发具备凭证窃取、动态执行与持久化能力的恶意 J…...
从零开始玩转translategemma-27b-it:Ollama环境搭建与提示词详解
从零开始玩转translategemma-27b-it:Ollama环境搭建与提示词详解 1. 环境准备与快速部署 想要体验强大的图文翻译能力,首先需要搭建好运行环境。translategemma-27b-it是一个基于Ollama部署的翻译模型,支持文本和图片的翻译功能。 1.1 系统…...

Wan2.2-I2V-A14B效果展示:复杂提示词‘雨夜霓虹街道行人撑伞行走’生成效果
Wan2.2-I2V-A14B效果展示:复杂提示词雨夜霓虹街道行人撑伞行走生成效果 1. 模型能力概览 Wan2.2-I2V-A14B是一款专为高质量视频生成设计的先进模型,能够将文字描述转化为生动的动态画面。这款模型特别擅长处理复杂场景和细腻氛围的渲染,在以…...