恶劣天候三维目标检测论文列表整理
恶劣天候三维目标检测论文列表

图摘自Kradar
🏠 介绍
Hi,这是有关恶劣天气下三维目标检测的论文列表。主要是来源于近3年研究过程中认为有意义的文章。希望能为新入门的研究者提供一些帮助。
可能比较简陋,存在一定的遗漏,欢迎在Issue中提出,我们会及时更新~
github链接:https://github.com/ylwhxht/3D_Object_Detection_in_Adverse_Weather_Paper_List
(觉得有用的话来个⭐,谢谢^ _ ^)
📚 Table of Contents
- Survey
- Dataset
- Weather Quantitative Analysis
- LiDAR Adverse Weather Simulation
- LiDAR Denoiser
- LiDAR-based/with Camera Detector
- 4D Radar-based/with Camera Detector
- LiDAR+3D Radar Fusion Detector
- LiDAR+4D Radar Fusion Detector
- with Cooperative Perception
Surveys 🔝
2022
-
Perception and Sensing for Autonomous Vehicles Under Adverse Weather Conditions: A Survey
ISPRS 2022
[paper] -
3D Object Detection for Autonomous Driving: A Survey
Pattern Recognition 2022
[paper]
2023
-
Performance and Challenges of 3D Object Detection Methods in Complex Scenes for Autonomous Driving
TIV 2023
[paper] -
Survey on LiDAR Perception in Adverse Weather Conditions
IV 2023
[paper]
2024
-
Object Detection in Autonomous Vehicles under Adverse Weather: A Review of Traditional and Deep Learning Approaches
Algorithms 2024
[paper] -
Perception Methods for Adverse Weather Based on Vehicle Infrastructure Cooperation System: A Review
Sensors 2024
[paper] -
Robustness-Aware 3D Object Detection in Autonomous Driving: A Review and Outlook
TITS 2024
[paper]
2025
- LiDAR Denoising Methods in Adverse Environments: A Review
Sensors 2025
[paper]
Datasets 🔝
2021
-
[DENSE(STF)]: Seeing Through Fog Without Seeing Fog: Deep Multimodal Sensor Fusion in Unseen Adverse Weather
CVPR 2020
[paper] [data] -
[WOD-DA]: Waymo Open Dataset Domain Adaptation
2020
[data]
2022
- [CADC]: Canadian Adverse Driving Conditions Dataset
IJRR 2021
[paper] [data]
2023
-
[Kradar]: K-radar: 4d radar object detection for autonomous driving in various weather conditions
NIPS 2022
[paper] [code&data] -
[WADS]: Winter adverse driving dataset for autonomy in inclement winter weather
Optical Engineering 2023
[paper] [code&data] -
[SemanticSpray++]: SemanticSpray++: A Multimodal Dataset for Autonomous Driving in Wet Surface Conditions
IV 2024
[paper] [code&data]
2024
- Is Your LiDAR Placement Optimized for 3D Scene Understanding?
NIPS 2024
[paper] [code&data]
Weather Quantitative Analysis🔝
2009
- Performance of Laser and Radar Ranging Devices in Adverse Environmental Conditions
Journal of Field Robotics 2009
[paper]
2018
- A Benchmark for Lidar Sensors in Fog: Is Detection Breaking Down?
IV 2018
[paper]
2020
- Analysis of automotive lidar sensor model considering scattering effects in regional rain environments
Access 2020
[paper]
2021
- A Quantitative Analysis of Point Clouds from Automotive Lidars Exposed to Artificial Rain and Fog
Atmosphere 2021
[paper]
2022
-
Measuring the Influence of Environmental Conditions on Automotive Lidar Sensors
Sensors 2022
[paper] -
Camera and LiDAR analysis for 3D object detection in foggy weather conditions
ICPRS 2022
[paper]
2023
- Benchmarking Robustness of 3D Object Detection to Common Corruptions in Autonomous Driving
CVPR 2023
[paper] [code]
2024
- Effect of Fog Particle Size Distribution on 3D Object Detection Under Adverse Weather Conditions
Arxiv 2024
[paper]
LiDAR Adverse Weather Simulation🔝
2018
- [FogSimulation]: A Benchmark for Lidar Sensors in Fog: Is Detection Breaking Down?
IV 2018
[paper]
2020
- [Fog Simulation]: Seeing Through Fog Without Seeing Fog: Deep Multimodal Sensor Fusion in Unseen Adverse Weather
CVPR 2020
[paper] [code]
2021
-
[Fog Simulation]: Fog Simulation on Real LiDAR Point Clouds for 3D Object Detection in Adverse Weather
ICCV 2021
[paper] [code] -
[Rain Simulation]: Lidar Light Scattering Augmentation (LISA): Physics-based Simulation of Adverse Weather Conditions for 3D Object Detection
Arxiv 2021
[paper] [code]
2022
-
[Snow Simulation]: https://arxiv.org/abs/2203.15118
CVPR 2022
[paper] [code] -
[Spray Simulation]: Reconstruction and Synthesis of Lidar Point Clouds of Spray
RAL 2022
[paper] [code]
2023
-
[Various Simulation]: Benchmarking Robustness of 3D Object Detection to Common Corruptions in Autonomous Driving
CVPR 2023
[paper] [code] -
[Snow Simulation]: LiDAR Point Cloud Translation Between Snow and Clear Conditions Using Depth Images and GANs
IV 2023
[paper] -
[Various Simulation]: Robo3D: Towards Robust and Reliable 3D Perception against Corruptions
ICCV 2023
[paper] [code] -
[Snow Simulation]: L-DIG: A GAN-Based Method for LiDAR Point Cloud Processing under Snow Driving Conditions
Sensors 2023
[paper]
2024
-
[Snow Simulation]: LiDAR Point Cloud Augmentation for Adverse Conditions Using Conditional Generative Model
Remote Sens. 2024
[paper] -
[Rain Simulation]: Sunshine to Rainstorm: Cross-Weather Knowledge Distillation for Robust 3D Object Detection
AAAI 2024
[paper] [code]
2025
- [Snow Simulation]: Adverse Weather Conditions Augmentation of LiDAR Scenes with Latent Diffusion Models
Arxiv. 2025
[paper]
LiDAR Denoiser🔝
2018
- De-noising of lidar point clouds corrupted by snowfall
CRV 2018
[paper]
2020
-
Fast and Accurate Desnowing Algorithm for LiDAR Point Clouds
Access 2020
[paper] -
CNN-based Lidar Point Cloud De-Noising in Adverse Weather
RAL 2020
[paper] [code]
2021
- DSOR: A Scalable Statistical Filter for Removing Falling Snow from LiDAR Point Clouds in Severe Winter Weather
Arxiv 2021
[paper] [code]
2022
-
LiSnowNet: Real-time Snow Removal for LiDAR Point Cloud
IROS 2022
[paper] -
De-snowing LiDAR Point Clouds With Intensity and Spatial-Temporal Features
ICRA 2022
[paper] -
A Scalable and Accurate De-Snowing Algorithm for LiDAR Point Clouds in Winter
Remote Sens. 2022
[paper] -
AdverseNet: A LiDAR Point Cloud Denoising Network for Autonomous Driving in Rainy Snowy and Foggy Weather
ICUS 2022
[paper] [code] -
LiSnowNet: Real-time Snow Removal for LiDAR Point Clouds
IROS 2022
[paper] [code] -
4denoisenet: Adverse weather denoising from adjacent point clouds
RAL. 2022
[paper] [code] -
Adaptive Two-Stage Filter for De-snowing LiDAR Point Clouds
ICCRI 2022
[paper]
2023
-
RGOR: De-noising of LiDAR point clouds with reflectance restoration in adverse weather
ICTC. 2023
[paper] -
DCOR: Dynamic Channel-Wise Outlier Removal to De-Noise LiDAR Data Corrupted by Snow
ICIP 2023
[paper] -
GAN Inversion Based Point Clouds Denoising in Foggy Scenarios for Autonomous Driving
ICDL 2023
[paper]
2024
-
Denoising Point Clouds with Intensity and Spatial Features in Rainy Weather
TITS 2024
[paper] -
RGB-LiDAR sensor fusion for dust de-filtering in autonomous excavation applications
Automation in Construction 2024
[paper] -
TripleMixer: A 3D Point Cloud Denoising Model for Adverse Weather
Arxiv 2024
[paper] [code] -
An improved point cloud denoising method in adverse weather conditions based on PP-LiteSeg network
PeerJ Computer Science 2024
[paper] -
Denoising Framework Based on Multiframe Continuous Point Clouds for Autonomous Driving LiDAR in Snowy Weather
Sensors 2024
[paper] [code] -
Dust De-Filtering in LiDAR Applications With Conventional and CNN Filtering Methods
Sensors 2024
[paper] -
AdWeatherNet: Adverse Weather Denoising with Point Cloud Spatiotemporal Attention
VCIP 2024
[paper] [code] -
3D-UnOutDet: A Fast and Efficient Unsupervised Snow Removal Algorithm for 3D LiDAR Point Clouds
Authorea Preprints 2024
[paper] [code]
2025
- Semantic Segmentation Based Rain and Fog Filtering Only by LiDAR Point Clouds
Sensors. 2025
[paper]
LiDAR-based/with Camera Detector🔝
2020
- 1st Place Solution for Waymo Open Dataset Challenge - 3D Detection and Domain Adaptation
Arxiv 2020
[paper]
2021
- SPG: Unsupervised Domain Adaptation for 3D Object Detection via Semantic Point Generation
CVPR 2021
[paper]
2022
-
Rethinking LiDAR Object Detection in adverse weather conditions
ICRA 2022
[paper] -
Towards Robust 3D Object Detection In Rainy Conditions ITSC 2022
[paper] [code] -
LossDistillNet: 3D Object Detection in Point Cloud Under Harsh Weather Conditions
Access 2022
[paper] -
Robust 3D Object Detection in Cold Weather Conditions
IV 2022
[paper] -
Robust-FusionNet: Deep Multimodal Sensor Fusion for 3-D Object Detection Under Severe Weather Conditions
TIM 2022
[paper]
2023
-
A Point Cloud-based 3D Object Detection Method for Winter Weather
ISCER 2023
[paper] -
Source-free Unsupervised Domain Adaptation for 3D Object Detection in Adverse Weather
ICRA 2023
[paper] [code] -
Enhancing Lidar-based Object Detection in Adverse Weather using Offset Sequences in Time
ICECET 2023
[paper]
2024
-
Geometric information constraint 3D object detection from LiDAR point cloud for autonomous vehicles under adverse weather
Transportation research part C: emerging technologies 2024
[paper] -
Sunshine to Rainstorm: Cross-Weather Knowledge Distillation for Robust 3D Object Detection
AAAI 2024
[paper] [code] -
SAMFusion: Sensor-Adaptive Multimodal Fusion for 3D Object Detection in Adverse Weather
ECCV 2024
[paper] [code] -
LiDAR Point Cloud Augmentation for Adverse Conditions Using Conditional Generative Model
Remote Sensing 2024
[paper]
2025
-
AWARDistill: Adaptive and robust 3D object detection in adverse conditions through knowledge distillation,Expert Systems with Applications
2025
[paper] -
3D vision object detection for autonomous driving in fog using LiDaR
Simulation Modelling Practice and Theory 2025
[paper]
4D Radar-based/with Camera Detector 🔝
2022
- [RTNH]: K-radar: 4d radar object detection for autonomous driving in various weather conditions
NIPS 2022
[paper] [code&data]
2024
- TL-4DRCF: A Two-Level 4-D Radar–Camera Fusion Method for Object Detection in Adverse Weather
Sensors 2024
[paper]
LiDAR+3D Radar Fusion Detector🔝
2020
- Seeing Through Fog Without Seeing Fog: Deep Multimodal Sensor Fusion in Unseen Adverse Weather
CVPR 2020
[paper] [code]
2021
- Robust Multimodal Vehicle Detection in Foggy Weather Using Complementary Lidar and Radar Signals
CVPR 2021
[paper] [code]
2022
- Modality-Agnostic Learning for Radar-Lidar Fusion in Vehicle Detection
CVPR 2022
[paper]
2023
-
ST-MVDNET++: IMPROVE VEHICLE DETECTION WITH LIDAR-RADAR GEOMETRICAL AUGMENTATION VIA SELF-TRAINING
ICASSP 2023
[paper] [code] -
Bi-LRFusion: Bi-Directional LiDAR-Radar Fusion for 3D Dynamic Object Detection
CVPR 2023
[paper]
2024
-
3D Object Detection Algorithm in Adverse Weather Conditions Based on LiDAR-Radar Fusion
CCC 2024
[paper] -
RaLiBEV: Radar and LiDAR BEV Fusion Learning for Anchor Box Free Object Detection Systems
TCSVT 2024
[paper] [code] -
SAMFusion: Sensor-Adaptive Multimodal Fusion for 3D Object Detection in Adverse Weather
ECCV 2024
[paper] [code] -
TransFusion: Multi-Modal Robust Fusion for 3D Object Detection in Foggy Weather Based on Spatial Vision Transformer
TITS 2024
[paper]
LiDAR+4D Radar Fusion Detector🔝
2024
-
Towards Robust 3D Object Detection with LiDAR and 4D Radar Fusion in Various Weather Conditions
CVPR 2024
[paper] [code] -
LiDAR-based All-weather 3D Object Detection via Prompting and Distilling 4D Radar
ECCV 2024
[paper] [code]
2025
- L4DR: LiDAR-4DRadar Fusion for Weather-Robust 3D Object Detection
AAAI 2025
[paper] [code]
with Cooperative Perception 🔝
2024
-
V2X-DGW: Domain Generalization for Multi-agent Perception under Adverse Weather Conditions
Arxiv 2024
[paper] -
Weather-Aware Collaborative Perception With Uncertainty Reduction has been published
TITS 2024
[paper] [data]
2025
- V2X-R: Cooperative LiDAR-4D Radar Fusion for 3D Object Detection with Denoising Diffusion
CVPR 2025
[paper] [code]
相关文章:
恶劣天候三维目标检测论文列表整理
恶劣天候三维目标检测论文列表 图摘自Kradar 🏠 介绍 Hi,这是有关恶劣天气下三维目标检测的论文列表。主要是来源于近3年研究过程中认为有意义的文章。希望能为新入门的研究者提供一些帮助。 可能比较简陋,存在一定的遗漏,欢迎…...

conda的环境起的jupyter用不了已经安装的包如何解决
当你在使用Conda环境中的Jupyter Notebook时遇到无法读取某些库或模块的问题,通常是由以下几个原因引起的: 环境未激活:确保你已经在正确的Conda环境中激活了Jupyter Notebook。 库未安装:可能你需要的库没有在当前的Conda环境中…...

蓝桥杯题型
蓝桥杯题型分类 二分 123 传送门 1. 小区间的构成 假设数列的构成是如下形式: 第 1 个区间包含 1 个元素(1)。第 2 个区间包含 2 个元素(1 2)。第 3 个区间包含 3 个元素(1 2 3)。第 4 个区…...

STM32-I2C通信协议
一:I2C通信协议 就是在串口通信上满足四个要求 要求1:删掉一根通信线,防止资源浪费,只能在同一根线上进行发送和接收要求2:需要一个应答机制,没发送一个字节都有一次应答要求3:一根线上能同时…...

taosd 写入与查询场景下压缩解压及加密解密的 CPU 占用分析
在当今大数据时代,时序数据库的应用越来越广泛,尤其是在物联网、工业监控、金融分析等领域。TDengine 作为一款高性能的时序数据库,凭借独特的存储架构和高效的压缩算法,在存储和查询效率上表现出色。然而,随着数据规模…...

uniapp微信小程序vue3自定义tabbar
在App.vue隐藏原生tabbar,也可以在pages.json中配置 二选一就好了 创建 CustomTabBar 公共组件 <template><view class"custom-tab-bar" :style"{paddingBottom: safeAreaHeight px}"><view class"tab-bar-item" :…...

BUUCTF——[GYCTF2020]FlaskApp1 SSTI模板注入/PIN学习
目录 一、网页功能探索 二、SSTI注入 三、方法一 四、方法二 使用PIN码 (1)服务器运行flask登录所需的用户名 (2)modename (3)flask库下app.py的绝对路径 (4)当前网络的mac地…...

如何用Kimi生成PPT?秒出PPT更高效!
做PPT是不是总是让你头疼?😩 快速制作出专业的PPT,今天我们要推荐两款超级好用的AI工具——Kimi 和 秒出PPT!我们来看看哪一款更适合你吧!🚀 🥇 Kimi:让PPT制作更轻松 Kimi的生成效…...

数据结构(回顾)
数据结构(回顾) 回顾 不同点顺序表链表存储空间上物理上一定连续逻辑上连续,物理上不一定连续随机访问支持,时间复杂度O(1)不支持,时间复杂度O(N)任意位置插入或者删除元素可能需要挪动元素,效率低&#…...
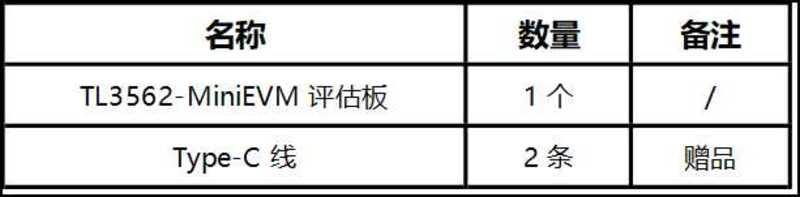
全国产!瑞芯微3562Mini(2GHz四核A53 NPU)工业开发板规格书
评估板简介 创龙科技 TL3562-MiniEVM 是一款基于瑞芯微 RK3562J/RK3562 处理器设计的四核 AR M Cortex-A53 单核 ARM Cortex-M0 国产工业评估板,主频高达 2.0GHz。评估板由核心板和评估底板组成,核心板 CPU、ROM、RAM、电源、晶振等所有元器件均采用国…...

鸿蒙HarmonyOS评论功能小demo
评论页面小demo 效果展示 1.拆解组件,分层搭建 我们将整个评论页面拆解为三个组件,分别是头部导航,评论项,回复三个部分,然后统一在index界面导入 2.头部导航界面搭建 Preview Component struct HmNavBar {// 属性&a…...

异常(6)
今天我们继续来讲异常的内容,关于异常的捕获和声明,也是在处理异常的的重要方式,话不多说,来看. 异常的捕获 异常的捕获,也就是异常,的具体处理方式,主要有两种,主要有两种:异常声明throws以及try-catch捕获处理. 3.1异常声明throws. 处在方法声明时参数列表之后…...

精选一百道备赛蓝桥杯——2.K倍区间
解题思路 任何两个前缀区间的和对k取模的值相等,则由大的前缀区间减掉小的前缀区间所形成的区间的必定是K倍区间。因此我们可以对具有区间和%k值相等任何两个区间进行组合,再将这些值加起来就得到结果!证明: 假设一个数列为a1,a2…...

编译Telegram Desktop
目录 一、前言 二、环境准备 2.1 2.2 2.3 2.4 2.5 2.6 2.7 2.8 三、编译 四、总结和学习 一、前言 Telegram 是一款全球广泛使用的即时通讯软件,以其强大的隐私保护、跨平台同步和丰富的功能而闻名。它支持一对一聊天、群组(最多20万成员&am…...

玩转python: 掌握Python数据结构之链表
链表是计算机科学中最基础的数据结构之一,也是许多高级数据结构和算法的基础。本文将带你从零开始,逐步掌握链表的概念、实现和应用。通过丰富的案例和通俗易懂的解释,你将能够轻松理解并应用链表。 什么是链表? 链表是一种线性…...

upload-labs详解(1-12)文件上传分析
目录 uploa-labs-main upload-labs-main第一关 前端防御 绕过前端防御 禁用js Burpsuite抓包改包 upload-labs-main第二关 上传测试 错误类型 upload-labs-env upload-labs-env第三关 上传测试 查看源码 解决方法 重命名,上传 upload-labs-env第四关…...
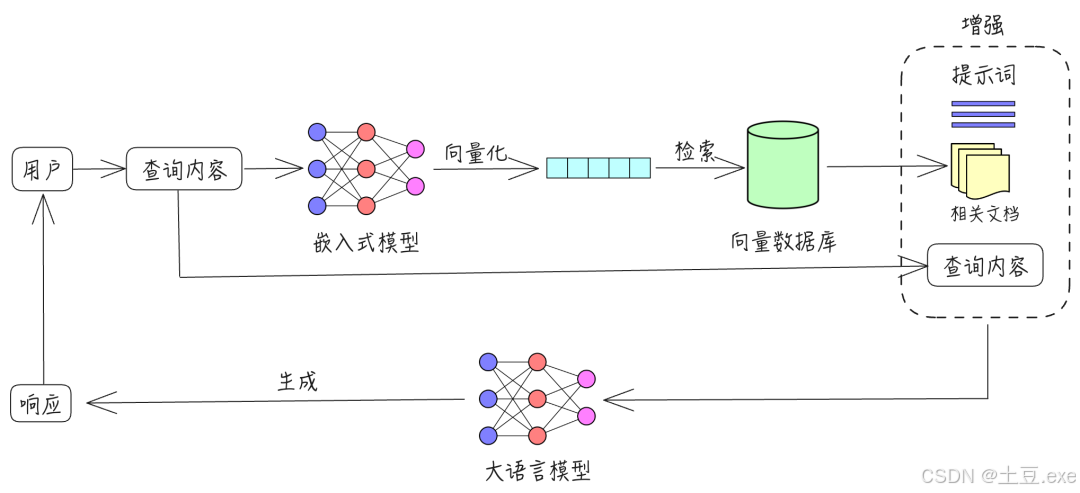
RAG系统(检索增强生成)的优化策略
RAG(检索增强生成)系统的优化可以从多个方面入手,主要包括数据、查询、检索、生成、框架和评估等几个重要环节。本文将详细介绍这些优化策略,并为每个环节提供具体的操作方法。 一、数据优化 1. 数据清洗和增强 数据质量直接影响检索和生成的效果,因此需要进行细致的数据…...

写毕业论文用哪个AI好?这6款AIGC论文工具给你答案
撰写毕业论文是一项艰巨的任务,AIGC 论文工具的出现为同学们提供了有力支持。以下 6 款工具在功能、适用场景等方面各有优势,助你高效完成毕业论文。 文赋 AI 论文 文赋 AI 论文堪称毕业论文写作的得力助手。它的生成速度令人惊叹,短短 5 分…...

loadingcache优化
问题分析 通过当前现场的火焰图进行分析 原本的loadingcache public LoadingCache<Integer, Student> map Caffeine.newBuilder().refreshAfterWrite(CONTRACT_CACHE_HOURS, TimeUnit.HOURS).maximumSize(CONTRACT_CONFIG_CACHE_SIZE).recordStats().build(key -> …...

【Vue3 Element UI - Plus + Tyscript 实现Tags标签输入及回显】
Vue3 Element Plus TypeScript 实现 Tags 标签输入及回显 在开发后台管理系统或表单页面时,动态标签(Tags) 是一个常见的功能需求。用户可以通过输入框添加标签,并通过关闭按钮删除标签,同时还需要支持标签数据的提…...

AI应用开发利器:ai-devkit工具包核心功能与工程实践指南
1. 项目概述与核心价值最近在折腾AI应用开发,发现一个挺有意思的项目,叫codeaholicguy/ai-devkit。乍一看名字,你可能会觉得这又是一个“AI开发工具包”,市面上类似的工具已经多如牛毛了。但深入用下来,我发现它不太一…...

从零构建现代化Web控制面板:安全架构与实时监控实践
1. 项目概述:一个为开发者设计的现代化控制面板最近在GitHub上看到一个挺有意思的项目,叫clawpanel,作者是kweephyo-pmt。光看名字,你可能会联想到“爪子”和“面板”,感觉像是个带点攻击性或工具属性的管理界面。实际…...

FPGA高速ADC数据采集实战——基于AD9253 LVDS接口与ISERDESE2设计
1. AD9253高速ADC核心特性解析 AD9253这颗14位125MSPS四通道ADC芯片,在通信和医疗成像领域堪称经典。我经手过的多个雷达项目中,它的信噪比表现总能带来惊喜——75.3dBFS的实测数据比手册标称值还要稳定。但真正让工程师们又爱又恨的,是它那个…...

安全聚合技术:原理、实现与多场景应用
1. 安全聚合技术概述安全聚合(Secure Aggregation)是一种多方安全计算技术,它允许多个互不信任的参与方在不泄露各自私有数据的前提下,共同计算出一个聚合结果。这项技术的核心价值在于解决了数据隐私与数据共享之间的矛盾&#x…...

STM32CubeIDE实战指南:从代码编译到一键下载的完整流程解析
1. STM32CubeIDE开发环境概述 对于刚接触STM32开发的工程师来说,选择一款合适的集成开发环境(IDE)至关重要。STM32CubeIDE是ST官方推出的免费开发工具,它集成了代码编辑、编译、调试和下载功能于一体,特别适合新手快速上手。我在实际项目中使…...

技术视角:Sketchfab数据提取工具深度解析3D模型下载机制
技术视角:Sketchfab数据提取工具深度解析3D模型下载机制 【免费下载链接】sketchfab sketchfab download userscipt for Tampermonkey by firefox only 项目地址: https://gitcode.com/gh_mirrors/sk/sketchfab 在WebGL技术日益成熟的今天,Sketch…...

开源AI图像生成工具Dream-Creator:本地部署与Stable Diffusion实战指南
1. 项目概述:一个开源的AI图像生成与创作工具 最近在GitHub上闲逛,发现了一个挺有意思的项目叫“Dream-Creator”。光看名字,你可能会联想到一些AI绘画或者创意生成工具。没错,这确实是一个围绕AI图像生成的开源项目。作为一个在…...

Windows鼠标指针主题定制:从.cur/.ani文件到个性化交互体验
1. 项目概述:一个为Windows终端注入灵魂的鼠标指针主题如果你和我一样,每天有超过8小时的时间是与Windows操作系统相伴的,那么你对那个千篇一律的白色箭头鼠标指针,恐怕早已感到审美疲劳。它就像一个沉默的、功能性的背景板&#…...

83.人工智能实战:RAG 表格问答怎么做?从前期发现“表格被切碎”到结构化解析、行列索引与答案校验
人工智能实战:RAG 表格问答怎么做?从前期发现“表格被切碎”到结构化解析、行列索引与答案校验 一、问题场景:Word 文档能答,Excel 表格一问就错 很多企业知识库不只有 Word 和 PDF,还有大量表格: 1. 报销标准表 2. 产品价格表 3. 客户等级表 4. SLA 服务等级表 5. 部门…...

开源无人机任务控制系统:微服务架构与自主飞行开发实战
1. 项目概述:一个开源的无人机任务控制系统如果你和我一样,玩过一段时间无人机,从最初的“一键起飞”到后来想实现一些自动化的航线飞行,你可能会发现,市面上成熟的任务规划软件(比如DJI的Pilot 2或一些地面…...